4-3-3-2 サーボ加速度計
本装置の加速度検出用に内蔵するセンサはサーボ加速度計であり、その原理を図4-3-3-2 に示す。
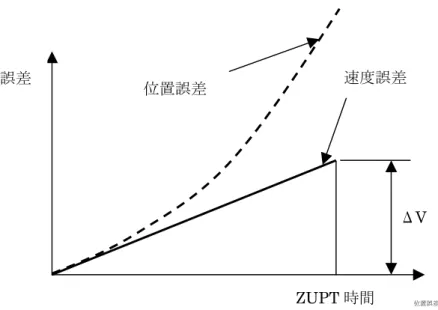
図4-3-3-3 において加速度が←方向から印加された場合、Hinge に繋がった Forcer Coil 部分が加速度方向に変位し、Capacitive Pickoff によりその変位が検出される。この検出さ れた変位をServo Amplifier にて電流指令に変えて Forcer Coil に電流を流すと、その回り に構成されたIron Flux Path とのローレンツ力で Capacitive Pickoff が零になるように変 位する。Capacitive Pickoff が零になったところで、加速度と電流値が釣り合うことになり、 その時の電流値を読み出すと加速度出力になる。 この加速度計はPickup が常に零になるように制御されるので、スケールファクタ誤差が 少なく(Zero Effect)高精度な加速度出力を得ることが出来る。 4-3-4 純慣性による位置誤差 上記のようなセンサを用いても純慣性においては誤差が発生する。この誤差の発生は通 常84 分(シューラー周期)で振動し大きな度差になるが、今回の運用方法ではこの大きな 誤差にならないように運用方法で工夫している。一般に慣性航法装置の位置誤差に関して は、運用時間の短い範囲において誤差の基本式をフーリエ級数展開により次式のように近 似することが出来る。この近似式が成立するのは計測時間が純慣性のみで4 分以下である。 図4-3-3-3 サーボ加速度計の構造
3 2
6
1
2
1
Bgt
gt
p
δθ
δ
δ
=
+
(式2-3-3-2) 22
1
Bgt
gt
v
δθ
δ
δ
=
+
(式2-3-3-3)p
δ
:位置誤差(各軸毎)(m)δθ
:姿勢角誤差(rad)g
:重力加速度(9.8m/s2)t
:計測時間(sec)B
δ
:ジャイロバイアス(rad/sec)v
δ
:速度誤差(m/sec) この式に数値を代入する前に慣性センサの誤差について記述すると表4-3-3-1 のようになる。 表4-3-3-1 慣性センサの性能 項目 ジャイロ 加速度計 バイアス 0.03 deg/h 300 μG スケールファクタ 150 ppm 300 ppm ランダムウォーク 0.008 deg/h --- (値は1σ) 現在計測時間(ZUPT 間隔)を 30 秒とすると、上記表の値を式 2-3-3-2 と式 2-3-3-3 にそ れぞれ代入すると3
.
1
006
.
0
3
.
1
30
8
.
9
3600
180
03
.
0
6
1
30
8
.
9
10
300
2
1
6
1
2
1
2+
3=
×
×
6×
×
2+
×
×
×
×
3=
+
≅
=
δθ
δ
−π
δ
p
gt
Bgt
となり、時間が 30 秒程度であれば殆どが加速度計バイアスの精度であることが分かる。 この場合その精度は1σで1.3m である。またその場合の速度誤差については、下式のよう に082
.
0
00006
.
0
082
.
0
30
8
.
9
3600
180
03
.
0
2
1
30
8
.
9
10
300
2
1
2=
×
6×
×
+
×
×
×
×
2=
+
≅
+
=
δθ
δ
−π
δ
v
gt
Bgt
同様に加速度計の誤差になる。この場合加速度計の誤差は姿勢角誤差(加速度バイアス誤 差)を時間積分しただけであり、補正することが出来そうである。そこで、純慣性により 計測された速度を慣性装置を停止させた時の速度誤差として認識し、それまでに得られた 位置データ(速度データの積分値)を再計算することで高精度な位置データを求めている。 グラフで書くと図4-3-3-4 になる。図4-3-3-4 位置誤差/速度誤差のトレンド 4-3-5 純慣性による位置誤差の補正 上記のように慣性装置の位置誤差の発生は、その主要成分は誤差のトレンドが決まって おり、この特性を利用して位置誤差を補正することができる。図の4-3-3-4 において ZUPT 時間においては慣性装置の誤差はΔV で表される。もちろんこの速度誤差を積分したものが 位置誤差として表される。 そこでZUPT 間隔毎にデータを記録しておいてその誤差を割り戻して再計算することに よりこの速度誤差分の位置誤差は除去できることになる。 誤差 位置誤差 位置誤差 速度誤差 ZUPT 時間 ΔV 計測データ 計測開始 ZUPT 計測データ (ZUPT 済) 補正されたデータ 計測データ (ZUPT 済) 計測データ 計測データ 計測データ 計測データ 計測データ ZUPT ZUPT ZUPT 計測データ (CUPT 済) CUPT 補正されたデータ
上記のように補正演算を行うのはペンコンピュータであり処理が完了すると、修正された 位置データを本体に送信することにより、慣性装置はその修正された値を初期値として計 算を行う。またペンコンピュータがこれらの補正演算を行っている間、本体は静止してい るのでアライメント動作を行っている。これは初期のアライメントと同様な精の方位角を 計測するアルゴリズムで、純慣性で発生した誤差を再度初期状態に戻す操作である。 この補正操作を概念的に書くとのようになる。
4-3-6 本装置の運用手順 本装置は適切な運用手順によって規定された精度の位置を検出することができる。 【準備】 ① 電子タグの位置情報の準備 運用する場所に設置した電子タグの位置データを高精度に計測し、それぞれの値をペン コンピュータにあるCUPT ファイルに保存する。 ② バッテリの充電 それぞれの機器はバッテリにより駆動されるので、十分に充電されていることを確認し ておく。 【起動】 ① ペンコンピュータの起動 ペンコンピュータを起動しその中の敷地測量装置のアイコンを起動する。 ② 初期値の設定 敷地測量の動作画面の中の初期値設定のアイコンを起動し、設定画面を表示し以下のデ ータを入力する。 ■ 初期緯度/経度/高度 ■ CUPT 位置データ (CUPT 番号を入力した場合、その位置データが表示されるかどうか確認) これらのデータが入力完了した場合は初期設定画面を終了する。 ③ 本体の電源投入 本体の電源スイッチをON にする。数秒するとリングレーザージャイロ特有のディザー 音が聞こえるので、その音を確認すると同時に敷地測量画面のステータスが起動中に変 り、その後「アライメント中」に変ることを確認する。尚電源を投入してから「アライ メント完了」ステータスに変るまで本体を動かさないこと。 ④ 敷地測量画面の左下に通信アイコンの右側に受信している電子タグの番号が表示され る。もし電子タグが受信可能レベルにある状態で、この受信表示がない場合は再度敷地 測量プログラムを再起動し、再度初期設定を行う。 ⑤ 無線LAN へのデータ送信は、敷地測量設定画面の左下の「接続」アイコンをクリック する。無線LAN の起動がかかると、敷地測量画面の右下の現在位置データが毎秒 FTP ファイルで送信を開始する。万一受信側が検出した場合は、このアイコンが「切断」に 変るので運用中には通信状態をモニターすること。 【計測】 ① 敷地測量画面のステータスが「アライメント完了」になった場合は計測モードに移行で
きることである。 ② 敷地測量画面の「計測開始」アイコンを選択する。アイコンが「計測終了」に変ること を確認すると同時にステータスも「計測中」に変ることを確認する。コマンド・ステー タスの確認はシリアルデータを使っているので、必ずステータスが変ってから移動を開 始すること。 ③ 以降「計測終了」アイコンを選択すると計測が終了するので注意すること。 (再度計測開始することは可能である) 【ZUPT】 ① 停止できる状況になった場合は「ZUPT」アイコンを選択する。 ② ステータスは「アライメント中」になり「ZUPT」アイコンは選択できなくなる。この とき、できるだけ動かないように注意する。ペンコンピュータがZUPT 処理を終えると 「計測再開」アイコンがアクティブになるので、移動する準備ができたところで「計測 再開」アイコンを選択する。この場合もステータスが「計測中」になるまでは移動を開 始しないように注意すること。 【CUPT】 ① CUPT 地点に到達した時は「CUPT」アイコンを選択する。このとき受信している電子 タグID 番号が、敷地測量画面の CUPT 位置の番号と一致していることを確認する。 ② ステータスは「アライメント中」になり「CUPT」アイコンは選択できなくなる。CUPT 処理の場合はまずその地点で「ZUPT」処理を行い次に「CUPT 処理を行うので、出来 るだけ動かないように注意する。ペンコンピュータが CUPT 処理を終えると「計測再 開」アイコンがアクティブになるので、移動する準備が出来たところで「計測再開」ア イコンを選択する。この場合もステータスが「計測中」になるまでは移動を開始しない ように注意すること。 【終了】 ① 終了するときは、「計測終了」アイコンを選択する。ペンコンピュータが終了のための 処理を行うと、プログラムの「終了」アイコンがアクティブになりプログラムを終了す ることが出来る。 ② その際無線LAN 送信用の「切断」アイコンを選択し、通信を終了させておく。
4-4.電子タグによる位置補正システム
■概要
自律型の位置推定などにおいて位置推定誤差の蓄積が避けられない場合、何らかの位置 補正手法が必要である。そのような補正手法の一つに位置座標が既知である点において位 置座標の初期化を行うという手法が挙げられる(CUPT : Coordinate Updates)。そこでこ の既知の位置座標をどのように得るかが問題になるが、電子タグを利用することにより容 易に実現可能である。 すなわち、あらかじめ座標が分かっている場所、例えば建物内における非常灯など、に 電子タグを設置し、この電子タグが発信している固有のID を利用者が持つタグ受信機で受 信することによりタグ受信機が現在いる位置座標を推定しようという方法である。概要を 図4-4-1 に示す。
タグ
IDを受信
受信したタグ
IDに該当する
位置座標を検索
テーブル
(タグ
ID⇔位置座標)
受信機の現在の位置座標が判明
蓄積した位置推定誤差の補正
図4-4-1. 電子タグを用いた位置補正の概要 電子タグを利用することにより、利用者は特別な操作をすることなしに既知の位置座標 を取得することができる。このような位置補正手法を利用することで、自律型の位置推定 において避けられない誤差の蓄積を電子タグが設置された位置において補正することが可 能である。■利用したハードウェア
利用したハードウェアは RF Code 社のビーコンタイプの RFID(Radio Frequency Identification : 電波を利用した非接触個体識別)タグと、その受信機であるスパイダーⅢ A リーダーである。図 4-4-1 に装置の外形を示す。 図4-4-1. RFID タグ(写真左)と RFID タグ受信機(写真右) RFID タグは自らの識別情報である ID をあらかじめ設定された周期で定期的に電波を利 用して通知する。タグ受信機はデュアルチャンネルRF 受信機でタグの送信周波数に合わせ てタグから送られるタグID データを受信するように設計されている。ちなみに、使用する 電波の周波数は303.825MHz である。
4-5.ウェアラブルセンサを利用した位置特定補助システム
4-3 で述べた慣性航法装置による位置特定システムは、現時点では装置の価格や大きさの 点で大きな課題がある。そのために ZUPT や CUPT 等の補正方法が必要になる。しかし、ZUPT のためにたびたび静止するのは手間がかかる。実際には慣性航法装置に外部から移動速度 ベクトルを与えることができれば、ZUPT と同様の原理で補正をすることができる。移動速 度などを得る方法として、身体に小型センサを装着して、身体の動揺特性や、四肢の変化 などを捉える方法などが考えられる。こうした方法は身体の移動速度ばかりでなく、隊員 の状況をも把握することを可能にする。 本研究で構想するウェラブルセンサシステムを示したものが図 4-4-1 である。このよう に、四肢に傾斜角度を計測するセンサを取り付けることで、四肢の動きを把握し、それを もとに身体の移動量や姿勢を推定できると考えられる。 図 4-4-1 スケルトンモデルと世界座標 図4-4-2 傾斜を測定するセンサボックス