目
第1章. 緒言 2
第2章. 歩行軌跡計測 3
2.1. 計測 説明 3
4
2.2. 実験方法 5
6 7 8 第3章 考察 結果 8
第4章 結言 9 参考文献 9 10 図 表 10
慣性 ン を用い 歩行特性 測定 第1章. 緒言
臨床 歩行分析 主 目視 行わ い , 師 療法士 患者 歩行を観察 , 害 把握 治療効果 判定を い .1)
,目視 分析 経験等 個人差 あ ,客観性 いう
問 あ . 解決 ,患者 歩行を定量的 計測 評価 手法 必要 あ . う 定量的評価法 運動学的分析 あ , 学的計測
用い .2)~4)
一方,MEMS技術 発展 ,近 加速 ン や イ ン を用い
分析 増え . 活用例 ,歩行軌跡を推定 , 消費量 評価 や動 検出を目的 7)歩行,走行中 腿部
加速 を計測 8), 肢 関節角 を推定 9),歩行中 歩幅,
,歩数等を推定 10)~12),臨床現場 タを目的
13)~15)等 挙 . , う 機器 高価 あ . 大掛
あ ,計測を行え 場 や時間 条件 自 限定 い .
患者 心身的負担 大 く,長時間 歩行を行 場 変化や長時間
歩行 回復量推移を評価 い. 研究 加速
第2章 歩行軌跡計測
2.1.計測 説明
歩行運動を計測 装置 研究 図2-1 小型基板を用い
ARDUINO いう , イ ン 最小限 周辺回路を備
え 小型基板 あ .ARDUINO 可能 , を実行
.開発環境 ,CやC++ く 比較的 ン
ン 言語を用い , を書く .従 ARDUINO ,私
製品設計や タイ 作成 い 私 を助 く あ
.特定 へ 信号 送信 う ,最小限 ン タ 適 い
.
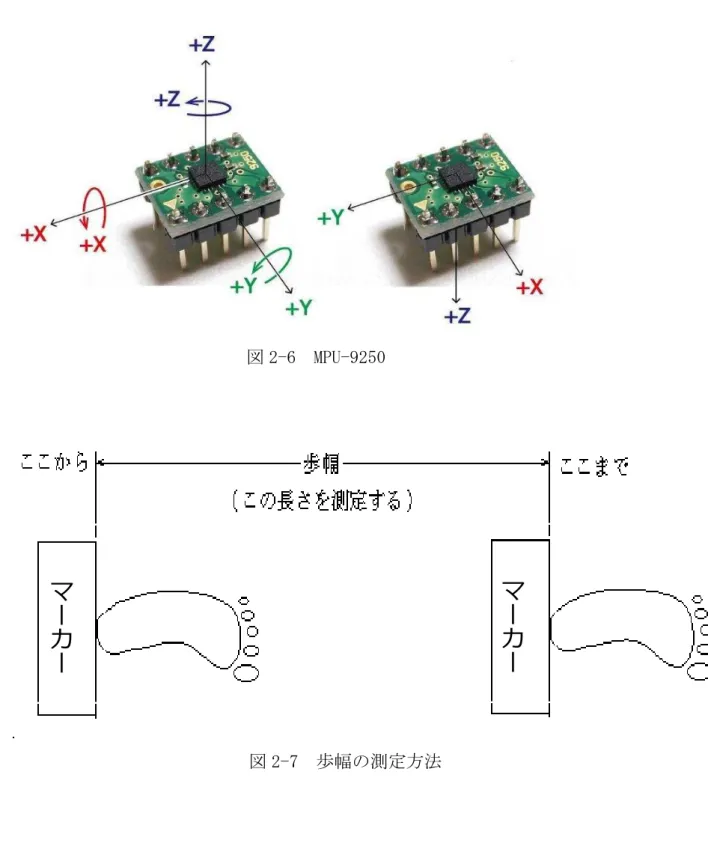
研究 ARDUINO 9軸加速 ン (図2-2)を用い 歩行時 加速
変動を計測 い 9 軸加速 ン 出 思う 以 9
軸 加 速 ン 説明 利 点 や 点 い 挙 説明 .加 速 ン 速 変 化を 計 測 機器 あ . 主 化学 実 験 用 計測 器 使 わ い ,最近 ,身 近 ,自 動 車
ョン , タ 多く タ 家電 採用 い .
加速 ン ,1軸,2軸,3軸 タイ あ ,3軸 ン , , 右,前 後 3 軸方向 対 速 を計測 ,傾 や,方向,重力を感知 .
例え , ョン ,車体 傾斜 一般道 高速道路
を判断 ,携 電話 傾 画面 向 を自動的 変え 機能 あ 加 速 ン 利 点 ,小型 軽 量 あ ,歩行 訓 練 時 い 装着
場 患者へ 負担 小 い ,場 を限定 必要 い ,長 期 時間変動 容易 計測 出来 . ,精 や分解能 近 向
い
加速 ン 点 重力 変化 く い状態 通常,機器 傾 重力 変化 生 ,加速 ン 反応 ,傾 重力を く 変え 機器を回転 , ン 動 を感知 い.垂直 設置
車 ン 中心 ン を 回転 , ほ 回 転 を
測 い
9軸加速 ン
■仕様
ン InvenSense MPU-9250 内 部 構 造 加 速 イ ン
インタ I2C, SPI
電源電 VDD DC2.4V~3.6V
I/O 電 VDDIO DC1.71V~(VDD)
最大 400kHz(I2C), 1MHz(SPI Read/Write), 20MHz(SPI ReadOnly)
◆加速 測定 ン み2 / み4 / み8 / み1βざ 分解能 16
感 1LSB=0.0β1mざ医み2), 0.122mざ医み4), 0.244mざ医み8), 0.488mざ医み1β) イ 300μざ/√-川
LPF 5~260Hz
出力 0.24~4000Hz
◆ イ 部
測定 ン み2α0 / みα00 / み1000 / み2000こた上 ま/上ごげ 分解能 16
感 1LSB=0.007β3医み2α0) 0.01α2β医みα00), 0.03048医み1000), 0.0β097医み2000)ま/上ごげ
イ 0.01ま/√-川
LPF 5~250Hz
出力 4~8000Hz
◆ ン 部 旭化成 AK8963
測定 ン み4800µT
分解能 14 /16
感 0.βμT/LSB医14けじ下),0.1αμT/LSB医1βけじ下) 動作温 40℃~ 85℃
消費電力 3.7mA 9-axis (no DMP), 1 kHz gyro ODR, 4 kHz accel ODR, 8 Hz mag.
repetition rate 3.4mA 6-axis (accel + gyro, no DMP), 1 kHz gyro ODR, 4 kHz accel ODR 3.2mA 3-axis Gyroscope only (no DMP), 1 kHz ODR 0.73mA 6-axis (accel + magnetometer, no DMP), 4 kHz accel ODR, mag. repetition rate = 8 Hz 0.45mA 3-Axis Accelerometer, 4kHz ODR (no DMP) 0.28mA 3-axis
Maざそご下ぞmご下ごち ぞそせと 医そぞ )M5), 8 -川 ちごたご下じ下じぞそ ちa下ご 8μA +つせせ (しじた .こせご Mぞこご
Supply Current
2.2 実験方法
歩行動作 加速 を計測 ,1個 ン x,y,z 3 方向 加
図2-5 う . 状態 ン 計測 標系 3 元方向
被験者 右方向をY 鉛直方向をX,進行方向をZ (図2-6 示 .) 水 床 面 直 線 を 歩 行 環 境 限定 ,計 測 標 系 物理空間 標系 近似的 対応 仮定 い 得 加速 タ 歩 行 軌跡 置情 報 を求 手 法 ,加速 二 階 積分
を用い . ,加速 a 速 V,速 V 置X,Y,Zを求 あ ,
純 積 分 を 踵 接 地等 誤 差 累 積を 考 慮 い ,長 距 歩行時 大 く う. 誤差を累積 い算出法 必要
, 方 法 研 究 ,速 , 置 い 常 点 補 正 を行 う 算
出法を用い 計算 .
鉛 直 方 向(X): 研究 歩 行 運 動 水 床 面 限 定 い ,鉛直 方向 着目 場 ,腰 高 均的 等 く あ . ,(1) 式 基 い 加速 ax 速 Vx を計算 ,(2)式 う 各時刻 前 後 1 い う短 期 的 時 間 速 均 を 求 , を速 算 出
点 ベ イン 定 , 均速 変 を速 Vx'
. 速 成分 除去 変動成分 残 .
置 X’ 算出 い 速 場 様 考え ,(3),(4)式 求
処 理 , 均 間 時 間 を 越 え 累 積成 分 い
ン , 速い振動的変化 計測 可能 . ほ
方向成分 い 様 あ
d
a
t
V
t xx
(
)
(
)
0
(1)
d V da t V t V t V t t x t x x x
x
(
)
2
1
)
(
)
(
)
(
)
(
1 1 0 '
(2)
d V t X tx
'
(
)
)
(
0
(3) X d
d t V t X t X t X t t t x
1 1 0 ' ( ) 2 1 ) ( ) ( ) ( ) (
右方向(Y):歩行 右方向 軌跡 歩行 を中心 右運動
. ,鉛 直 方向 異 , 右 方向 一 歩 右揺
加 え 直 線 状 歩 行 逸 脱 性 存 . 右 方 向 歩行
分析 ,短期的 一歩 右揺 ,長期的 見 逸
脱性を分 評価 必要 あ . 速 Vy’ 算出 鉛直方向 場 様 あ ,(5)式 う 加速 ax 積分 求 速 Vy ,
均 成分を除去 , 置 算出 い ,2 通 分
計算 .一歩 右揺 歩行軌跡Y' ,短期的時間 (前後1
間) 均 Y1sec を用い 点補正 (6)式 算出 .一方,
対 逸脱性 Y" 長期的 時間 (前後 5 間) 均 X5sec を用い
.(7)式 計 算 . 以 計測 (6)式 を 用 い い . 以
計測 (6)式を用い い .
d V d
a t V t V t V t t y y t y y
y ( )
2 1 ) ( ) ( ) ( ) ( ' 1 1 0
(5)
d Y d
V t Y t Y t Y t t y t
1 1 0 sec1 ( )
2 1 ) ( ' ) ( ) ( ) (
' (6)
Y t Y t Y t V d t Y d
t t y
5 5 0 sec5 ( )
10 1 ) ( ' ) ( ) ( ) (
" (7)
進行方向(Z):進行方向 関 ,鉛直, 右方向 様 あ ,(8)式 う
加速 az 積分 求 速 Vz , 均 成分を
除去 歩行速 Vz’を求 . , ,鉛直, 右方向 異 ,累 積 移動距 Zを求 必要 あ , 純 成分を除去
う 手 法 を 適用 い. 歩 行 速 振 動成 分
d a d
a t V t V t V t t z t z z z
z
1 1
0 2 ( )
1 ) ( ) ( ) ( ) (
' (8)
Vz"(t)Vz'(t)Vz',a mp(t) (9)
Z t
tVz d0 "( ) )
( (10)
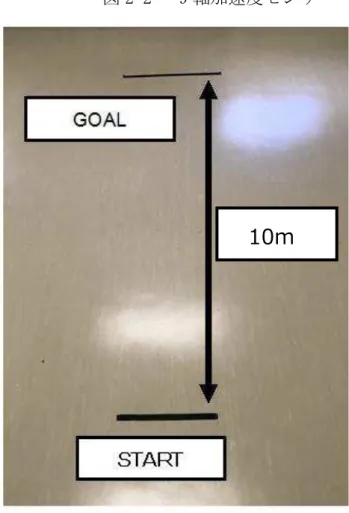
,実 計測 い を求 , 一被験者 2 種類以
速 歩 い わ ,臨床 適用 い. ,被 験 者 一 定 速 歩 く う 測定 ,歩 行 速 成 分 大 く変化 い 仮定 . 回 直線を y= x 近似 . 時 実 移 動 距 時 間 均 速 (y)を 求 ,計 測 速 振 幅(x) 関 係 定数 を決 定 . 一 計 測 タ を 決 定
. , 臨 床 制約 近 似 あ , 計 測
原理的 限界 い.以 (11),(12)式を用い,移動距 Zを求 .
) ( ' ) ( ' ) (
" t Vz t Vz, t
Vz a mp (11)
d V t
Z( ) t z"( )
0
(12)
う 計測 標系 3 元方向 対応 計算法を う
,物理空間 歩行軌跡を近似的 得 .
,私 歩幅 測定値を 印を付 ,記録 . 図2-7 示 .)
第3章.考察 結果
1 歩 長 (歩 幅) 一 歩 時 間 い 実 測値 推定 値 比 較 を
.(図 2-8 示 .)推定値 1 周期 周期 終わ 周期 始 差
,歩幅 推定値を算出 .一歩 長 (歩幅) 推定値 実測値を比較
,95% 精 得 .(表 1 示 .) ,一歩 時間 推定値 実測値を
比較 ,94% 精 得 .(表2 示 .)考察 ,3回 様 実験 を行い 誤差を生 . 誤差 生 原因 ,実験を行う
腰部 装着 加速 ン を動 い う 装着 ン 固定
実 験 を 行 , 完 全 固定 考
く正確 踏 込 不可能 あ 考え .
第4章.結言
研究 ,加速 ン を用い , 加速 波形 装着部 歩行軌跡を 算 出 累 積 誤差 を 減 軌 跡 算出 法 を 利 用 .加 速 ン 問 点 あ 誤 差 累 積 を 減 算 出 法 を 用い,理 屈 正 く 測 定
.加速 タ 歩 行 軌跡 を 求 可能 あ .今 後 課 ,
術 後 歩 行 運 動 経 時変 化 を 計 測 , 治療 効
果や回復量 推移を 正 く評価 い 期待
い .
参考文献
1)佐藤 郎:臨床 歩行分析 理学療法学 30-4,249/253(2003)
2)神先 角:機器を使用 歩行 評価 理学療法学 30-4,254/259(2003)
3)江原義弘:歩行 学性 理学療法学 30-3,83/87(2003)
4)Eva De Bujanda ,Sylvie Nadeau,Daniel Bourbonnais:Pelvic and shoulder movements in the frontal plane during treadmill walking in adults with stroke,Journal of Stroke and Cerabrovascular Disease,13-2,58/69(2004) 5)Luinge,H.J.,Veltink,P.H.andBaten,C.T.M.,Estimating orientation with gyroscopes accelerometers,Tech.Health Care,Vol.7(1999),pp.455-459 6)Bouten,C.V.,Westerterp,K,R.,Verduin,M.and Janssen,J.D.,Assessment of energy expenditure for physical activity using a triaxial
accelerometer,Med.Sci.Sports Exerc.,Vol.26 No.12(1994),pp.1516-1523 (7)Veltink,P.H.,Bussmann,B.J.,De Vries,W,Martens W.L.J. and Van
Lummel ,R.C.,Detection of static and dynamic activities using uniaxial accelerometers,IEEE Trans.Biomed.Eng.,Vol.38 No.12(1991),pp.1186-1193. (8)Lafortune,M.A.,Three-dimensional acceleration of the tibia during walking and running,J.Biomech,Vol.23 No.8(1990),pp.859-863.
(9)Willemsen,A.Th.M.,Van Alste,J.A. and Boom,H.B.K.,Real-time gait assessment utilizing a new way of accelerometry,J.Biomech,Vol.23 No.8(1990),pp.859-863.
(10)Tong,K.and Granat,M.h.,A practical gait analysis system using gyroscopes,Med.Eng.Phys.,Vol.21(1999),pp.87-94.
(11)Aminian,K.,Najafi,B.,Biila,C,C.,Leyvraz,P.-F. and
(12)Brandes,M.,Zijlstra,W.,Heikens,S.,Van Lummel,R.and
osenbaum,D.,Accelerometry based assessment of gait parameters in children,Gait Post.,Vol.24(2006),pp.482-486.
(13)Lotters,J.C.,Schipper,J.,Veltink,P.H.,Olthuis,W. and
Bergveld,P.,Procedure for in-use calibration of triaxial accelerometers in medical applications,Sensors Actuators Col.A68(1998),pp.221-228. (14)Aminian,K.,Rezakhanlou,K.,De Andres,E.,Fritsch, C., Leyvraz,P.-F. and Robert,P.,Temporal feature estimation during walking using miniature accelerometers:an analysis of gait improvement after hip arthroplasty,Med. Biol. Eng. Comput. Vol.37(1999),pp.686-691.
(15)古賀智美, 靖宏, 和美,満園良一,荷重 ン イ ン 加
速 ン を 用 い 麻 痺 歩 行 動 作 計 測,九 体 育 学 研 究,Vol.19
No.2(2005),pp.45-48.
図
図2-2 9軸加速 ン
図2-3 10m直線
図2-4 装着 様子
ン 加速 ン
加 速 ン 取 付
USB
図2-6 MPU-9250
図2-7 歩幅 測定方法
マ
ー
カ
ー
図2-8 歩行速
表1 一歩 長 (歩幅)
周期 始 [m] 78.3
周期 終わ [m] 79.0
歩幅 推定値 [cm] 69.8
歩幅 実測値 [cm] 66
誤差[cm] 3.82
表2 一歩 時間
周期 始 [s] 204.0
周期 終わ [s] 204.8
歩幅 推定値 [s] 0.80
歩幅 実測値 [s] 0.85