MELSERVO-
J3/J3W
から
MELSERVO-
J4
へ。
既存の設計資産をしっかりと継承。
J3
安全上のご注意
ご使用前に必
みく
い。
据付け,運転,保守
び点検の前に必
の置換えの手引
,技術資料集,取扱説明書
び付属書類を
す
熟
し,
しくご使用く
い。機器の知識,安全の情報
び注意事項のす
につい
習熟し
ご使用く
い。
の置換えの手引
,安全注意事項のランクを
危険
び
注意
し
区分し
あ
ます。
危険
取扱いを誤
,危険
状況
起
え
,死亡また
重傷を受け
能性
想定
場合。
注意
取扱いを誤
,危険
状況
起
え
,中程度の傷害や軽傷を受け
能性
想定
場合
び物的損害
けの発生
想定
場合。
,
注意に記載した事項
も,状況に
重大
結果に結びつく
能性
あ
ます。
い
も重要
内容を記載し
いますの
必
守
く
い。
禁止
び強制の
表示の説明を次に示します。
禁止
(
し
いけ
い
)
を示します。例え
,
火気厳禁
の場合
に
ます。
強制
(
必
し
け
い
)
を示します。例え
,接地の場合
に
ます。
の置換えの手引
,物的損害に至
い
ベルの注意事項や別機能
の注意事項を
イント
し
区分し
あ
ます。
1.
感電防止のために
危険
感電の恐
あ
ため,配線作業や点検
,電源をオ
にしたあ
,
15
分以上経過し,チ
ー
ランプ
消灯したの
,テスタ
P+
N-
の間の電圧を確認し
行
く
い。
,チ
ー
ラン
プの消灯確認
必
サーボアンプの
面
行
く
い。
サーボアンプ
びサーボ
ータ
,確実に接地工事を行
く
い。
配線作業や点検
専門の技術者
行
く
い。
サーボアンプ
びサーボ
ータ
,据え付け
配線し
く
い。感電の原因に
ます。
濡
た手
スイッチ操作し
い
く
い。感電の原因に
ます。
ケー
ル
傷つけた
,無理
スト
スを
けた
,重いものを載せた
,挟み込
し
い
く
い。感電の原因に
ます。
通電中
び運転中
サーボアンプの
面カ
ーをあけ
い
く
い。感電の原因に
ます。
サーボアンプの
面カ
ーを外し
の運転
行わ
い
く
い。高電圧の端子
び充電部
露出し
いますの
感電の原因に
ます。
電源
オ
の
も配線作業
び定期点検以外
サーボアンプの
面カ
ーを外
い
く
い。サーボアンプ内部
充電
感電の原因に
ます。
感電防止のため,サーボアンプの保護接地
(PE)
端子
(
ークのついた端子
)
を制御盤の保護接地
(PE)
に必
接続し
く
い。
感電を避け
ために,電源端子の接続部に
絶縁処理を施し
く
い。
2.
火災防止のために
注意
サーボアンプ,サーボ
ータ
び回生抵抗器
,不燃物に取
付け
く
い。
燃物への直接取付
け,
び
燃物近くへの取付け
,発煙
び火災の原因に
ます。
主回路電源
コン
ータユニット,
サーボアンプの
L1/L2/L3
の間に
必
電磁接触器を接続し
,
コン
ータユニット,サーボアンプの電源側
電源を遮断
構成にし
く
い。コン
ータユニットま
た
サーボアンプ
(
ライ
ユニット
)
故障した場合,電磁接触器
接続
い
い
,大電流
流
続け
発煙
び火災の原因に
ます。
回生抵抗器を使用す
場合
,異常信号
電源を遮断し
く
い。回生トラン
スタの故障
に
,回生抵抗器
異常過熱し発煙
び火災の原因に
ます。
サーボアンプ
びサーボ
ータ内部に
,金属片
の
電性異物や油
の
燃性異物
混入し
い
うにし
く
い。
3.
傷害防止のために
注意
各端子に
技術資料集に決め
た電源
信号以外
印加し
い
く
い。感電,火災,傷害
の
原因に
ます。
端子接続を間違え
い
く
い。破裂,破損
の原因に
ます。
極性
(+/-)
を間違え
い
く
い。破裂,破損
の原因に
ます。
通電中
び電源遮断後のし
くの間
,サーボアンプの冷却
ン,回生抵抗器,サーボ
ータ
高温に
場合
あ
ます。誤
手や部品
(
ケー
ル
)
触
い
う,カ
ーを設け
の安全対策を施し
く
い。
4.
諸注意事項
次の注意事項につ
まし
も十分留意く
い。取扱いを誤
た場合に
故障,け
,感電,火災
の原
因に
ます。
(1)
運搬
据付けについ
注意
製品の質量に応
,
しい方法
運搬し
く
い。
制限以上の多段積み
やめく
い。
サーボアンプ運搬時
面カ
ー,
ケー
ル
びコネクタを持た
い
く
い。
落
す
あ
ます。
サーボアンプ
びサーボ
ータ
,技術資料集に従い質量に耐えう
に据え付け
く
い。
上に乗
た
,重いものを載せた
し
い
く
い。
取付け方向
必
守
く
い。
サーボアンプ
制御盤内面,また
その他の機器
の間隔
,規定の距離をあけ
く
い。
損傷,部品
け
い
サーボアンプ
びサーボ
ータを据え付け
,運転し
い
く
い。
サーボアンプの吸排気口をふ
い
く
い。故障の原因に
ます。
サーボアンプ
びサーボ
ータ
落
せた
,
衝撃を与えた
し
い
く
い。
け
,
故障
の
原因に
ます。
コネクタ部分に衝撃を加え
い
く
い。接続不良,故障
の原因に
ます。
次の環境条件
保管
びご使用く
い。
項目 環境条件
周 温度
運転 0 °C ~ 55 °C (凍結の い )
保存 -20 °C ~ 65 °C (凍結の い )
周 湿度
運転
5 %RH ~ 90 %RH (結露の い )
保存
雰 気 屋内 (直射日光 当た い ),腐食性 ス 引火性 ス オイル スト 塵埃の い
標高 対象機種に 異 ます。(各サーボアンプ技術資料集をご確認く い。)
耐振動 5.9 m/s2,10 Hz ~ 55 Hz (X,Y,Z 各方向)
保管
長期間に渡
た場合
,三菱電機システムサービスに
問合せく
い。
サーボアンプを取
扱う場合,サーボアンプの角
鋭利
部分に注意し
く
い。
サーボアンプ
必
金属製の制御盤内に設置し
く
い。
木製
包材の消毒
除虫対策のく
蒸剤に含ま
ン系物質
(
ッ素,
塩素,
臭素,
素
)
弊社製品に侵入す
故障の原因
ます。残留したく
蒸成分
弊社製品に侵入し
い
うにご注
意いた
く
,く
蒸以外の方法
(
熱処理
)
処理し
く
い。
,消毒
除虫対策
,
包前
の木材の段階
実施し
く
い。
(2)
配線につい
注意
配線
しく確実に行
く
い。サーボ
ータの予期し
い動
の原因に
ます。
ケー
ル
びコネクタ
固定用
び
ック機構を使用し
確実に装着し
く
い。運転時に
ケー
ル
びコネクタ
外
恐
あ
ます。
サーボアンプの出力側に
,進相コン
ンサ,サー
キラー
びラ
オ
イズ
ルタ
(
オプション
FR-BIF(-H))
を取
付け
い
く
い。
サーボ
ータの誤作動の原因に
の
,サーボアンプ
サーボ
ータの電源の相
(U/V/W)
しく接
続し
く
い。
サーボアンプの電源出力
(U/V/W)
サーボ
ータの電源入力
(U/V/W)
直接配線し
く
い。配線
の途中に電磁接触器
を介
い
く
い。異常運転や故障の原因に
ます。
U
サーボ ータ
M V
W
U
V
W
U
サーボ ータ
M V
W
U
V
W
サーボアンプ サーボアンプ
サーボアンプの制御出力信号用
DC
ーに取
付け
サー
吸収用の
イオー
の向
を間違え
い
く
い。故障し
信号
出力
く
,非常停止
の保護回路
作動不能に
あ
ま
す。
DOCOM
制御出力信号
DC 24 V
サーボアンプ
RA
シンク出力
インタ
ースの場合
DOCOM
制御出力信号
DC 24 V
サーボアンプ
RA
ソース出力
インタ ースの場合
端子台への電線の締付け
十分
い
,
接触不良に
電線や端子台
発熱す
あ
ます。
必
規定のトルク
締め付け
く
い。
故障の原因に
ため,サーボアンプの
U
,
V
,
W
び
CN2
に,間違
た軸のサーボ
ータを接続し
い
く
い。
サーボアンプの予期し
い再起動を防止す
ため,主回路電源をオ
にした
EM2
また
EM1
もオ
に
す
回路を構成し
く
い。
誤作動の恐
あ
ため,サーボアンプの電源線
(
入出力線
)
信号線の平行布線
び束
配線
避け,分離配
線をし
く
い。
(3)
試運転
調整につい
注意
試運転
,
の技術資料集に記載
た注意事項
び手
を守
行
く
い。故障,機械の破
損
び人身事故の原因に
ます。
(4)
使用方法につい
注意
時に運転停止し,電源を遮断す
うに外部に非常停止回路を設置し
く
い。
機械端に衝突す
能性
あ
装置の場合,機械の
動部の終端に
ットスイッチまた
ストッパを
取
付け
く
い。衝突に
機械
破損す
恐
あ
ます。
製品の分解,修理
び改造
し
い
く
い。感電,火災,傷害
の原因に
ます。
また,分解,修理
び改造した製品
保証外
す。
サーボアンプに運転信号を入
たままアラーム
セットを行う
突然再始動しますの
,運転信号
切
い
を確認し
行
く
い。事故の原因に
ます。
イズ
ルタ
に
電磁障害の影響を小
くし
く
い。
サーボアンプの近く
使用
電子
機器に電磁障害を与え
あ
ます。
サーボアンプを焼却や分解します
有毒
ス
発生す
場合
あ
ますの
,絶対にし
い
く
い。
サーボ
ータ
サーボアンプ
指定
た組合せ
ご使用く
い。
オプション,
周辺機器
しい組合せ
しく配線し
使用し
く
い。
感電,火災,傷害
の
原因に
ます。
サーボ
ータの電磁
ーキ
保持用
すの
,通常の制動に
使用し
い
く
い。
電磁
ーキ
誤配線,
命
び機械構造
(
タイ
ン
ベルトを介し
ボール
サーボ
ータ
結
合
い
場合
)
に
保持
い場合
あ
ます。
機械側に安全を確保す
ための停止装置を
設置し
く
い。
電源遮断時,
アラーム発生時
の
イ
ック
ーキ作動時,
サーボ
ータを外部の動力
回
い
く
い。火災の原因に
ます。
(5)
異常時の処置につい
注意
停電時,停止時
び製品故障時に危険
状態
想定
場合に
保持用
し
電磁
ーキ付
サ
ーボ
ータの使用また
外部に
ーキ構造を設け
防止し
く
い。
電磁
ーキ用作動回路
外部の非常停止スイッチに連動す
回路構成にし
く
い。
サーボ
ータ
電磁
ーキ
B
URA
非常停止スイッチ
遮断し
く
い。
ALM(
故障
)
オ
また
MBR(
電磁
ーキイン
タ
ック
)
オ
遮断し
く
い。
DC24V
アラーム発生時
原因を取
除
,安全を確保し
アラーム解除後,再運転し
く
い。
ー
ューズ遮断器また
ューズ
作動した場合,確実に原因を取
除
,安全を確保し
電源
を投入し
く
い。必要に応
サーボアンプの交換また
配線の見直しを実施し
く
い。発煙,
火災
び感電の原因に
ます。
瞬時停電復電後の不慮の再始動を防止す
保護方策を設け
く
い。
(6)
保守点検につい
注意
サーボアンプの電解コン
ンサ
,劣化に
容量
低
します。故障に
次災害を防止す
ため,
一般的
環境
使用
た場合
10
年程度
交換
を推奨します。交換
三菱電機システムサー
ビス
ます。
(7)
一般的注意事項
置換えの手引
に記載
い
図
,細部を説明す
ためにカ
ーまた
安全のための遮断物を外し
た状態
描
い
場合
あ
ます。製品を運転す
必
規定
のカ
ーや遮断物を元
廃棄物の処理につい
本製品
廃棄
に
,
次に示す
2
つの法
の適用を受け,
そ
の法規ご
の配慮
必要に
ま
す。
また,
次の法
につい
日本国内に
い
効力を発揮す
もの
あ
ため,
日本国外
(
海外
)
に
い
,現地の法
優先
ます。必要に応
,最終製品への表示,告知
をし
いた
く
う
願いし
ます。
1.
資源の有効
利用の促進に関す
法
(
通称
:
資源有効利用促進法
)
に
け
必要事項
(1)
不要に
た本製品
,
限
再生資源化を
願いします。
(2)
再生資源化
,鉄く
,電気部品
に分割し
スクラップ業者に売却
多いため,
必要に応
分割し,そ
適
業者に売却
を推奨します。
2.
廃棄物の処理
び清掃に関す
法
(
通称
:
廃棄物処理清掃法
)
に
け
必要事項
(1)
不要に
た本製品
前
1
項の再生資源化売却
を行い,
廃棄物の減量に努め
を推奨し
ます。
(2)
不要に
た本製品
売却
を廃棄す
場合
,同法の産業廃棄物に該当します。
(3)
産業廃棄物
,同法の許
を受けた産業廃棄物処理業者に処理を委
し,
ニ
スト管理
を
含め,適
処置をす
必要
あ
ます。
(4)
サーボアンプに使用す
電池
,いわゆ
一次電池
に該当しますの
,自治体
定め
た廃
棄方法に従
廃棄く
い。
サーボアンプの高調波抑制対策につい
のサーボアンプ
高圧又
特別高圧
受電す
需要家の高調波抑制対策
イ
ライン
(
現
:
経済産業省
発行
)
の対象
す。
の
イ
ラインの適用対象に
需要家殿
,高調波対策の要否確認を行い,限度値
を超え
場合に
対策
必要
す。
EEP-ROM
の
命につい
パラ
ータの設定値
を記憶す
EEP-ROM
の書込み制限回数
10
万回
す。次の操作の合計回数
10
万
回を超え
,
EEP-ROM
の
命に
も
いサーボアンプ
故障す
場合
あ
ます。
パラ
ータの変更に
EEP-ROM
への書込み
イスの変更に
EEP-ROM
への書込み
サーボアンプの
STO
機能
海外規格への対応
海外規格への対応につい
,以
の関連
ニュアルを参照し
く
い。
«
ニュアルについ
»
初め
のサーボを
使いいた
く場合,
の置換えの手引
び次に示す技術資料集
必要
す。必
ご用意のうえ,
のサーボを安全にご使用く
い。
関連
ニュアル
ニュアル名称 ニュアル番号
MELSERVO-J4シ ーズ ACサーボを安全に 使いいた くために
(サーボアンプに同 )
IB(名)0300175
MELSERVO-J4 サーボアンプ技術資料集 (トラ ルシューテ ン 編) SH(名)030108
MELSERVO サーボ ータ技術資料集 (第3集) (注1) SH(名)030099
MELSERVO ニアサーボ ータ技術資料集 (注2) SH(名)030095
MELSERVO イ クト ライ ータ技術資料集 (注3) SH(名)030097
MELSERVO ニアエンコー 技術資料集 (注2,4) SH(名)030096
EMC設置 イ ライン IB(名)67303
注 1. 回転型サーボ ータを使用す 場合に必要 す。
2. ニアサーボ ータを使用す 場合に必要 す。
3. イ クト ライ ータを使用す 場合に必要 す。
4. ルク ーズ システムを使用す 場合に必要 す。
«
配線に使用す
電線につい
»
1 MR-J3/MR-J3W
置換えの概要
... 1- 2
2
主
置換え対象機種
... 1- 2
2.1
サーボアンプ置換え対象機種
... 1- 2
2.2
サーボ
ータ置換え対象機種
... 1- 2
3
置換えの流
... 1- 3
3.1
概要
... 1- 3
3.1.1
置換え検討の流
(
ー
) ... 1- 3
3.1.2
構成図
... 1- 4
3.1.3 MR-J3
シ
ーズ
MR-J4
シ
ーズへの変更箇所
... 1- 5
3.1.4 MR-J3W
シ
ーズ
MR-J4
シ
ーズへの変更箇所
... 1- 7
3.2
置換え検討
... 1- 9
3.2.1
置換え前システムの確認
... 1- 9
3.2.2
基本置換え機種の決定
... 1- 9
3.2.3
取付け互換性の確認
... 1-15
3.2.4
置換え機種別
詳細検討
... 1-15
3.2.5
周辺機器の確認
... 1-15
3.2.6
立上
手
の確認
... 1-15
4
関連資料
... 1-15
4.1
カタ
... 1-15
4.2
技術資料集
... 1-15
4.3
置換えの手引
... 1-15
4.4 MR-J3
シ
ーズ
⇒
MR-J4
シ
ーズ置換えツール
... 1-16
4.5
三菱電機
FA
サイト
... 1-16
第
2
部
MR-J3-_A_
MR-J4-_A_
への置換え検討
2-
1
~
2-64
1
概要
... 2- 2
2 MR-J3-_A_
置換えのケーススタ
... 2- 2
2.1
置換え方法の検討
... 2- 2
2.2
置換え方法
... 2- 2
3 MR-J3-_A_
MR-J4-_A_
の相違点
... 2- 4
3.1
機能比較表
... 2- 4
3.2
標準結線図比較
... 2- 6
3.3
対応コネクタ,端子台の対応一覧
... 2- 8
3.4
周辺機器対応比較
... 2-13
3.5
パラ
ータ比較
... 2-14
3.5.1
置換え時の設定必須パラ
ータ
... 2-14
3.5.2
パラ
ータ対比一覧
... 2-16
3.5.3
パラ
ータ詳細対比
... 2-20
3.6
置換えの
イント
注意点
... 2-62
第
3
部
MR-J3-_B_
MR-J4-_B_
への置換え検討
3-
1
~
3-44
1
概要
... 3- 2
2 MR-J3-_B_
置換えのケーススタ
... 3- 2
2.1
置換え方法の検討
... 3- 2
2.2
置換え方法
... 3- 3
3.4
コネクタ,端子台の対応一覧表
... 3- 9
3.5
周辺機器対応比較
... 3-12
3.6
パラ
ータ比較
... 3-12
3.6.1
置換え時の設定必須パラ
ータ
... 3-13
3.6.2
パラ
ータ対比一覧
... 3-14
3.6.3
パラ
ータ詳細対比
... 3-17
4
機能の応用
... 3-43
第
4
部
MR-J3W-_B
MR-J4W2-_B
への置換え検討
4-
1
~
4-50
1
概要
... 4- 2
2 MR-J3W-_B
置換えのケーススタ
... 4- 2
2.1
置換え方法の検討
... 4- 2
2.2
サーボアンプ代替機種
... 4- 2
2.3
置換え方法
... 4- 3
3 MR-J3W-_B
MR-J4W2-_B
の相違点
... 4- 6
3.1
機能比較表
... 4- 6
3.2
周辺機器
の構成
... 4- 8
3.3
ネットワーク比較
... 4-12
3.4
標準結線図比較
... 4-12
3.5
コネクタ,端子台の対応一覧表
... 4-14
3.5.1 200 V
級
... 4-14
3.5.2 DC 48 V/24 V
級
... 4-17
3.6
周辺機器対応比較
... 4-19
3.7
パラ
ータ
... 4-20
3.7.1
置換え時の設定必須パラ
ータ
... 4-21
3.7.2
パラ
ータ対比一覧
... 4-22
3.7.3
パラ
ータ詳細対比
... 4-26
4
機能の応用
... 4-49
第
5
部
MR-J3-DU_
から
MR-J4-DU_
への置換え検討
5-
1
~
5-80
1
概要
... 5- 2
2
機能
構成
... 5- 2
2.1 MR-J3-DU_
MR-J4-DU_
の相違点
... 5- 2
2.2
コン
ータユニット/
ライ
ユニット/サーボ
ータの組合せ
... 5- 3
2.3
周辺機器
の構成
... 5- 5
3
設置
... 5- 7
3.1
取付け方向
間隔
... 5- 7
3.2
電磁接触器制御用コネクタ
(CNP1)
につい
... 5- 9
4
信号
配線
... 5-11
4.1
標準結線図比較
... 5-11
4.1.1
電磁接触器駆動出力
有効の場合
(
出荷状態
) ... 5-11
4.1.2
電磁接触器制御用コネクタ
(CNP1)
を無効にした場合
... 5-16
6
特性
... 5-43
6.1
過負荷保護特性
... 5-43
6.2
電源設備容量
発生損失
... 5-46
6.3
主回路
/
制御回路電源投入時の突入電流
... 5-47
7
オプション
周辺機器
... 5-48
7.1
ケー
ルオプション組合せ比較表
... 5-48
7.1.1 MR-J3CDL05M (0.5 m)
保護協調ケー
ル
... 5-49
7.2
電線選定例
... 5-50
7.2.1 MR-J3
シ
ーズ,電源電線サイズ
... 5-50
7.2.2 MR-J4
シ
ーズ,電源電線サイズ
... 5-52
7.3
ー
ューズ遮断器
ューズ
電磁接触器の選定例
... 5-54
7.3.1 MR-J3-DU_
ー
ューズ遮断器
電磁接触器
(
推奨品
) ... 5-54
7.3.2 MR-J4
シ
ーズ
ー
ューズ遮断器
ューズ
電磁接触器
(
推奨品
) ... 5-54
7.4 FR-BU2-(H)
ーキユニット
... 5-56
7.4.1
選定
... 5-56
7.4.2
ーキユニットのパラ
ータ設定
... 5-57
7.4.3
接続例
... 5-57
7.4.4
外形寸法図
... 5-73
7.5
回生オプション
... 5-75
7.5.1
組合せ
回生電力
... 5-75
7.6
外付け
イ
ック
ーキ
... 5-76
7.6.1 MR-J3
シ
ーズ
... 5-76
7.6.2 MR-J4
シ
ーズ
... 5-77
7.7
外形寸法図
... 5-77
7.7.1 MR-J3
シ
ーズ
... 5-77
7.7.2 MR-J4
シ
ーズ
... 5-79
第
6
部
共通資料
6- 1
~
6-138
1
仕様差異
... 6- 2
1.1
詳細仕様
機能差異
... 6- 2
1.2
サーボアンプ
... 6- 4
1.2.1
主回路系端子台
... 6- 4
1.2.2
検出器信号
(CN2)
の対比
... 6- 9
1.2.3
イ
ック
ーキ
:
惰走量
... 6-10
1.2.4
強制停止減速機能選択
... 6-20
1.2.5
サーボセットアップソ
ト
エア
:
セットアップソ
ト
エア
(SETUP221)
⇒
MR Configurator2 ... 6-22
1.2.6
サーボアンプのイニシ
ライズ時間
... 6-23
1.2.7 Z
相パルス幅
... 6-25
1.3
過負荷保護特性
... 6-26
1.4
ネットワーク比較
... 6-33
1.4.1
サーボシステムネットワークの仕様比較
... 6-33
2
サーボアンプ外形寸法
取付け差異につい
... 6-35
2.1 MR-J3
シ
ーズ
⇒
MR-J4
シ
ーズ
サーボアンプ外形寸法
/
取付け寸法比較表比較
... 6-35
2.1.1
汎用インタ
ース
/SSCNET
インタ
ース
200 V/100 V
級
(22 kW
以
) ... 6-35
2.1.2
汎用インタ
ース
/SSCNET
インタ
ース
400 V
級
(22 kW
以
) ... 6-40
2.1.3
汎用インタ
ース
/SSCNET
インタ
ース
200 V
級
(30 kW
以上
) ... 6-43
2.2.2 MR-J3-_A_
パラ
ータ流用手
... 6-49
2.2.3
サーボアンプ
MR- J3-_A_
のサーボパラ
ータ
出し
... 6-50
2.2.4 MR-
J3-_A_
パラ
ータのコン
ート
びサーボアンプ
MR-J4-_A_
への書込み
... 6-52
2.2.5
コン
ートルール
(MR-J3-_A_ => MR-J4-_A_) ... 6-55
2.2.6
パラ
ータコン
ート後に確認
必要
パラ
ータ
... 6-59
2.3 MR-J3-_B_
び
MR-J3W-_B
パラ
ータ流用手
... 6-60
2.3.1 QD75MH
QD77MS/LD77MS
へ変更す
場合
... 6-61
2.3.2 Q17nHCPU/Q17nDCPU/Q170MCPU
Q17nDSCPU/Q170MSCPU(-S1)
へ
変更す
場合
... 6-63
2.3.3
コン
ートルール
(MR-J3-_B_
び
MR-J3W-_B => MR-J4-_B_
び
MR-J4W2-_B) 6-65
2.3.4
パラ
ータコン
ート後に確認
必要
パラ
ータ
... 6-68
3
共通注意事項
... 6-70
3.1
サーボアンプのソ
ト
エア
ー
ョン確認方法
... 6-70
3.1.1 MR Configurator2 (SW1DNC-MRC2-J)
に
確認方法
... 6-70
4
通信機能
(
三菱電機汎用
AC
サーボプ
トコル
) ... 6-71
4.1
構成
... 6-72
4.1.1
構成図
... 6-72
4.1.2 RS-422/RS-232C/USB
通信機能使用時に
け
注意事項
... 6-74
4.2
通信仕様
... 6-75
4.2.1
通信の概要
... 6-75
4.2.2
パラ
ータの設定
... 6-75
4.3
プ
トコル
... 6-76
4.3.1
送信
ータの構成
... 6-76
4.3.2
キ
ラクタコー
... 6-77
4.3.3
エラーコー
... 6-78
4.3.4
チ
ックサム
... 6-78
4.3.5
タイムア
ト処理
... 6-78
4.3.6
トライ処理
... 6-79
4.3.7
初期化
... 6-79
4.3.8
通信手
例
... 6-80
4.4
コ
ン
ータ
ン
一覧
... 6-81
4.4.1
出しコ
ン
... 6-81
4.4.2
書込みコ
ン
... 6-87
4.5
コ
ン
の詳細説明
... 6-89
4.5.1
ータの加工
... 6-89
4.5.2
状態表示
... 6-91
4.5.3
パラ
ータ
... 6-92
4.5.4
外部入出力信号状態
(DIO
診断
) ... 6-96
4.5.5
入力
イスのオン
/
オ
... 6-99
4.5.6
入出力
イス
(DIO)
の禁止
解除
... 6-100
4.5.7
入力
イスのオン
/
オ
(
テスト運転用
) ... 6-101
4.5.8
テスト運転
ー
... 6-102
4.5.9
出力信号
ンのオン
/
オ
(
出力信号
(DO)
強制出力
) ... 6-106
4.5.10
アラーム履歴
... 6-107
6.1.1 J3
互換
ー
の概要
... 6-117
6.1.2 J3
互換
ー
対応す
運転
ー
... 6-117
6.1.3 J3
互換
ー
対応機能一覧
... 6-118
6.1.4 J3
互換
ー
の
別方法
... 6-120
6.1.5 J4
ー
/J3
互換
ー
切換え方法
... 6-121
6.1.6 J3
互換
ー
の使用方法
... 6-122
6.1.7 J4
ー
/J3
互換
ー
切換えに関す
注意事項
... 6-123
6.1.8 J3
互換
ー
の注意事項
... 6-123
6.1.9 "J3
互換
ー
"
切換え処理の仕様変更につい
... 6-124
6.1.10 J3
拡張機能
... 6-126
6.2
スタス
ー
運転機能
... 6-128
6.3
スケール計測機能
... 6-132
6.3.1
機能
構成
... 6-132
6.3.2
スケール計測エンコー
... 6-134
6.3.3
スケール計測機能の使用方法
... 6-137
第
7
部
ータの置換え検討
7-
1
~
7-68
1
サーボ
ータの置換えについ
... 7- 2
1.1
サーボ
ータ代替機種
互換性
... 7- 2
2
サーボ
ータ仕様比較
... 7-13
2.1
サーボ
ータ取付け寸法比較
... 7-13
2.2
サーボ
ータ取付け詳細寸法比較
... 7-18
2.3
減速機付
サーボ
ータ取付け寸法比較
... 7-21
2.4
減速機付
サーボ
ータ実減速比比較
... 7-24
2.5
慣性
ー
ント比較
... 7-25
2.6
サーボ
ータコネクタ仕様比較
... 7-36
2.7
サーボ
ータトルク特性比較
... 7-57
第
8
部
周辺オプションの置換え検討
8-
1
~
8-78
1
回生オプション組合せ比較表
... 8- 2
1.1
回生オプション
200 V
級
/100 V
級
... 8- 3
1.1.1 MR-J3/MR-J3W
シ
ーズ,組合せ
回生電力
... 8- 3
1.1.2 MR-J4
シ
ーズ
(
置換え機種
)
,組合せ
回生電力
... 8- 4
1.1.3
外形比較
... 8- 5
1.2
回生オプション
400 V
級
... 8- 6
1.2.1 MR-J3
シ
ーズ,組合せ
回生電力
... 8- 6
1.2.2 MR-J4
シ
ーズ
(
置換え機種
)
,組合せ
回生電力
... 8- 7
1.2.3
外形比較
... 8- 8
2
イ
ック
ーキオプション組合せ比較表
... 8-10
2.1
外形比較
... 8-11
3
ケー
ルオプション組合せ比較表
... 8-12
3.1 MR-J3
シ
ーズ
MR-J4
シ
ーズへの変更箇所
... 8-12
3.2 MR-J3W
シ
ーズ
MR-J4W2-_B
サーボアンプへの変更箇所
... 8-14
4
電源電線サイズ
... 8-15
4.1
電源電線サイズの選定例
... 8-15
4.1.1 MR-J3
シ
ーズ,電源電線サイズ
... 8-15
4.2.1 MR-J3
シ
ーズ,圧着端子
... 8-25
4.2.2 MR-J4
シ
ーズ,圧着端子
... 8-26
4.3
ー
ューズ遮断器
ューズ
電磁接触器の選定例
... 8-27
4.3.1 MR-J3
シ
ーズ,
ー
ューズ遮断器
ューズ
電磁接触器
... 8-27
4.3.2 MR-J4
シ
ーズ,
ー
ューズ遮断器
ューズ
電磁接触器
(
推奨品
) ... 8-28
4.3.3 MR-J3W
シ
ーズ,
ー
ューズ遮断器
ューズ
電磁接触器
... 8-30
4.3.4 MR-J4W2-_B
サーボアンプ,
ー
ューズ遮断器
ューズ
電磁接触器
... 8-31
5
ッテ
... 8-32
5.1
ッテ
サーボアンプの組合せ
... 8-32
5.2 MR-J3
シ
ーズ,
ッテ
... 8-33
5.3 MR-J4
シ
ーズ,
ッテ
... 8-34
5.3.1
ッテ
の交換方法
... 8-34
5.3.2 MR-BAT6V1SET
ッテ
使用時
... 8-35
5.3.3 MR-BAT6V1BJ
ッテ
中
ケー
ル用
ッテ
使用時
... 8-36
5.3.4 MR-BT6VCASE
ッテ
ケース使用時
... 8-37
5.4 MR-J3W
シ
ーズ,
ッテ
... 8-38
5.4.1 MR-BTCASE
ッテ
ケース
MR-BAT
ッテ
... 8-38
5.5 MR-J4W2-_B
サーボアンプ,
ッテ
... 8-39
5.5.1 MR-BT6VCASE
ッテ
ケース
... 8-39
5.5.2 MR-BAT6V1
ッテ
... 8-45
5.5.3 MR-BAT6V1SET-A
ッテ
(MR-J4W2-0303B6
のみ
) ... 8-46
6 EMC
ルタ
(
推奨品
) ... 8-49
6.1 MR-J3/MR-J3W/MR-J4
シ
ーズ
EMC
ルタ
(
推奨品
) 100 V/200 V/400 V
級
... 8-49
6.1.1
接続例
... 8-50
6.1.2
外形図
... 8-51
7
力率改善
AC
アクトル
力率改善
DC
アクトル
... 8-55
7.1 MR-J3
シ
ーズ力率改善
DC
アクトル
... 8-55
7.2 MR-J3/MR-J3W
シ
ーズ力率改善
AC
アクトル
... 8-58
7.3 MR-J4
シ
ーズ力率改善
DC
アクトル
200 V
級
... 8-60
7.4 MR-J4
シ
ーズ力率改善
DC
アクトル
400 V
級
... 8-62
7.5 MR-J4
シ
ーズ力率改善
AC
アクトル
200 V/100 V
級
... 8-64
7.6 MR-J4
シ
ーズ力率改善
AC
アクトル
400 V
級
... 8-66
8
セットアップソ
ト
エア
... 8-68
8.1 MR-J3/MR-J3W
シ
ーズ
セットアップソ
ト
エア
(SETUP221) ... 8-68
8.1.1
仕様
... 8-68
8.2 MR-J4
シ
ーズ
MR Configurator2 ... 8-69
8.2.1
仕様
... 8-69
8.3
システム要件
... 8-70
8.3.1
構成品
... 8-70
8.3.2
サーボアンプ
の接続
... 8-71
8.3.3 USB
通信機能使用時に
け
注意事項
... 8-71
9
冷却
ン外出しアタッチ
ント
... 8-72
9.1 MR-J3
シ
ーズ
(MR-J3ACN) ... 8-72
1
概要
...
付録
1- 2
1.1
サーボアンプ置換え対応機種
...
付録
1- 2
1.2
特長
...
付録
1- 2
2
置換え時の注意事項
...
付録
1- 2
3
置換え組合せ表
...
付録
1- 3
3.1
サーボアンプ置換え組合せ表
...
付録
1- 3
3.2
サーボ
ータ置換え組合せ表
...
付録
1- 4
4
ニューアルツール製品一覧
...
付録
1- 6
5
仕様
...
付録
1- 9
5.1
標準仕様
...
付録
1- 9
6
外形寸法図
...
付録
1-10
6.1
取付けアタッチ
ント
...
付録
1-10
6.2
変換ケー
ル
...
付録
1-13
6.2.1
サーボ
ータ側電源変換ケー
ル
...
付録
1-13
6.2.2
サーボ
ータ側エンコー
変換ケー
ル
...
付録
1-14
6.2.3
ケー
ル引出方向
...
付録
1-15
6.2.4
サーボ
ータ側冷却
ン変換ケー
ル
...
付録
1-15
第
1
部
MR-J3/MR-J3W
本書
MR-J3/MR-J3W
MR-J4
に置換え
ための検討項目を記載し
います。装置に
本書に記載
い
い項目につい
も検討
必要
す。そ
の項目につい
も技術資料集
びカタ
をご覧のうえ,ご検討願い
ます。
第
1
部
MR-J3/MR-J3W
置換えの概要
1 MR-J3/MR-J3W
置換えの概要
,
MELSERVO MR-J3
シ
ーズ
,
MR-J3W
シ
ーズ
を使用したシステムを
MR-J4
シ
ーズ
に置換え
ための流
を説明いたします。
置換えの方針
(
一括更新,サーボアンプ
/
サーボ
ータ
/
コント
ーラの部分更新
)
決ま
ました
,引
続
本手引
の対応部分
び,そ
の機種の
ニュアルも参照いた
,置換えを進め
いた
ま
す
う
願いいたします。
2
主
置換え対象機種
2.1
サーボアンプ置換え対象機種
シ ーズ サーボアンプ形名 シ ーズ サーボアンプ形名
MR-J3
シ ーズ
MR-J3-_A_
→
MR-J4
シ ーズ
MR-J4-_A_
MR-J3-_B_ MR-J4-_B_
MR-J3W
シ ーズ
MR-J3W-_B MR-J4W2-_B
2.2
サーボ
ータ置換え対象機種
サーボ ータ形名 サーボ ータ形名
小
容
量
低慣性 HF-KP_
→
HG-KR_
超低慣性
HF-MP_ HG-MR_
HF-MP_ (減速機付) HG-KR_ (減速機付)
中
容
量
中慣性 HF-SP_ HG-SR_
低慣性
HC-LP_
HG-JR_ HF-JP_
超低慣性
HC-RP_ HG-RR_
HC-RP_ (減速機付) HG-SR_ (減速機付)
ラット HC-UP_ HG-UR_
大
容
量 低慣性 HA-LP_
HG-SR_
HG-JR_
3
置換えの流
3.1
概要
MR-J3
シ
ーズ
/MR-J3W
シ
ーズを使用し
い
システムを,
MR-J4
シ
ーズを使用す
システムに置換
え
際の置換えの流
につい
説明し
います。
3.1.1
置換え検討の流
(
ー
)
置換え前システムの確認 置換え前システムの構成機器を確認します。
: 本 3.2.1 置換え前システムの確認 を確認し く い。
基本置換え機種の決定 置換え前システムにご使用のサーボアンプ サーボ ータ形名に対す 基本置換え
機種を決定します。
: 本 3.2.2 基本置換え機種の決定 を確認し く い。
詳細仕様 機能差異に対す 確認 基本置換え機種を決定し,置換え機種の 仕様 機能 に 影響を確認します。
: 本 第6部共通資料 を確認し く い。
取付け互換性の確認 基本置換え機種一覧の 取付け互換 の項目に ,互換性 取付けの差異を確認します。
: 本 第6部共通資料 2.サーボアンプ外形寸法 取付け差異につい , 第7部 ータの置換え検討 を確認し く い。
(MR-J3Wシ ーズ の置換え時,
第4部 MR-J3W-_B MR-J4W2-_Bへの置換え検討 も確認し く い。)
置換え機種別 詳細検討 置換え方針を決定し,詳細設計を実施します。
: 本 第2部 MR-J3-_A_ MR-J4-_A_への置換え検討
第3部 MR-J3-_B_ MR-J4-_B_への置換え検討
第4部 MR-J3W-_B MR-J4W2-_Bへの置換え検討
第5部 MR-J3-DU_ MR-J4-DU_への置換え検討
第7部 ータの置換え検討 を確認し く い。
周辺機器の確認 置換えに 周辺機器を確認します。
: 本 第8部周辺オプションの置換え検討 を確認し く い。
立上 手 の確認 立上 手 をご確認く い。
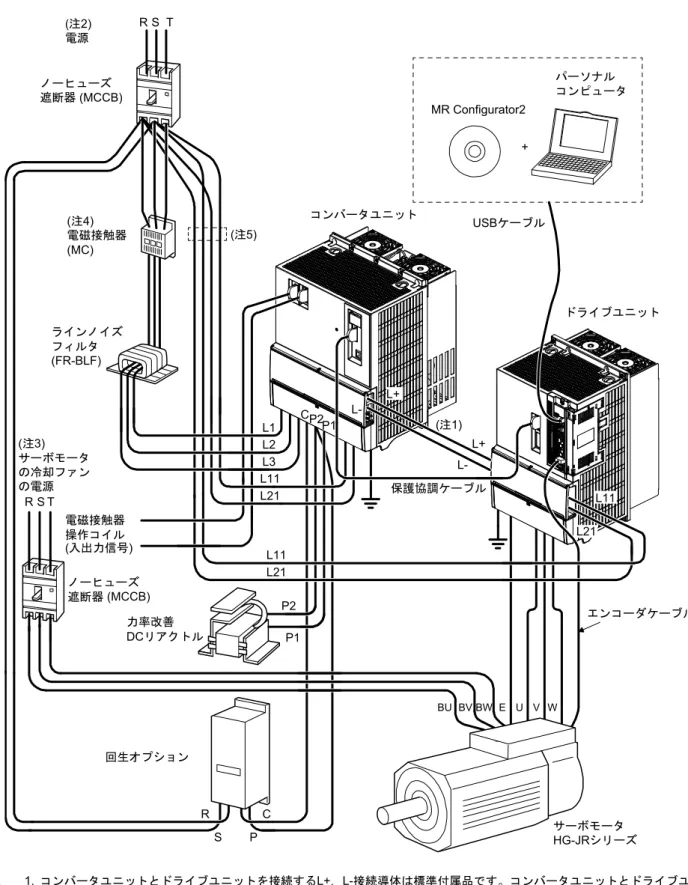
3.1.2
構成図
MR-J3-100A
以
を例に
MR-J3
シ
ーズを
MR-J4
シ
ーズに置換えた
の検討事項を示します。
注. MR-J3シ ーズ/MR-J3Wシ ーズに , MR Configurator2 もご使用いた けます。
サーボアンプ
(FR-BSF01)
電源
電磁接触器
(MC)
ー ューズ
遮断器(NFB)
コン ュータ
P C
回生 オプション
L21 L11
W V U
力率改善
DC アクトル
(FR-BEL)
P1
P2 L1 L2 L3 R S T
CN5
CN3
ア ニタ
CN1
CN2
CN4
中 端子台
CN6
セットアップ ソ ト エア
(SETUP221) (注)
パーソ ル
ッテ
MR-J3BAT
オプション
周辺機器
サーボ
ータ
ライン イズ ルタ
3.1.3 MR-J3
シ
ーズ
MR-J4
シ
ーズへの変更箇所
変更箇所 確認事項 影響 参照資料 項目
サーボアンプ コネクタ コネクタの形状, ン配置,信号略称 び 置 違いま
す。
第2部 3.3節 第3部 3.4節
第6部 1.2.2項
端子台 端子台の形状, 置 び電線の引 出し方向 違います。 第6部 1.2.1項
P3,P4端子 MR-J4サーボアンプ ,突入電流防止回路の前側にP3,P4
端子を設けました。MR-J3-11K_ ~ MR-J3-22K_のP1,P端子
置 異 ますの 注意し く い。
第6部 1.2.1項
Z相 MR-J3サーボアンプ MR-J4サーボアンプ置換えに け
差異 あ ませ 。
第6部 1.2.7項
パラ ータ 汎用インタ ース 上 互換 す ,パラ ータの変更
必要 す。 ,MR Configurator2のパラ ータコン ータ
機能を使用し ,MR-J3のパラ ータの設定内容をMR-J4に
移行す ます。SSCNETⅢインタ ース
MR-J4シ ーズにMR-J3互換 ー 用意 い ため,
パラ ータ変更 不要 す。
第2部 3.5節 第3部 3.6節 第6部 2.2節 第6部 2.3節
外形寸法 アンプ取付けについ ,互換性 あ ます。
但し,5 kW (200 V),3.5 kW (400 V),11 kW,15 kW ,
外形サイズ小型化のため取付け の 置 (間隔) 変更
いますの ,ご注意く い。
第6部 2.1.1項
第6部 2.1.2項
イ ック ーキ惰走量 サーボ ータの イ ック ーキ惰走量 違います。 第6部 1.2.3項
強制停止減速 MR-J4の場合,出荷状態 強制停止時 びアラーム発生時
にサーボ ータ 減速停止します。MR-J3の非常停止また
強制停止有効時 停止方法 異 ます。
第6部 1.2.4項
MR-J4-_A_サーボ
アンプ技術資料集
MR-J4-_B_サーボ
アンプ技術資料集
イニシ ライズ時間 電源投入 サーボオン受付ま の時間 異 ます 第6部 1.2.6項
オプション 周辺機器
ー ューズ遮断器 ューズ
MR-J3用 使用 い場合 あ ます。MR-J4用を選定し
く い。
第8部 4.3節
電磁接触器 MR-J3用 使用 い場合 あ ます。MR-J4用を選定し
く い。
第8部 4.3節
力率改善AC アクトル MR-J3用 使用 い場合 あ ます。FR-HALを推奨しま
す。
第8部 7.2節 第8部 7.5節 第8部 7.6節
力率改善DC アクトル MR-J3用 使用 い場合 あ ます。FR-HELを推奨しま
す。
第8部 7.1節 第8部 7.3節 第8部 7.4節
回生オプション 一部の回生オプション ,MR-J4 使用 ませ 。 第8部 1章
セットアップソ ト エア
(SETUP221)
MR-J4 , セットアップソ ト エア (SETUP221) 使
用 ませ 。
MR-J4シ ーズ びMR-J3シ ーズに , MR
Configurator2 ご使用いた けます。
第8部 8章
ッテ MR-J4用のMR-BAT6V1SETを使用し く い。 第8部 5章
エンコー ケー ル HG-JR 1000 r/minシ ーズの15 kW以上,HG-JR 1500 r/min
シ ーズの22 kW以上の機種の場合,以 のエンコー ケー
ルに変更 必要 す。
MR-ENECBL _ M-H-MTH
第6部 1.2.2項
第8部 3章
電線 MR-J4 HIV電線を推奨し います。 第8部 4章
イ ック ーキ 一部の イ ック ーキ ,MR-J4 使用 ませ
。
第8部 2章
EMC ルタ 推奨品に変更 あ ませ 。 第8部 6章
冷却 ン外出しアタッチ ン
ト
MR-J4-11K_(4)/-15K_(4) に ,MR-J3ACN 使用 ませ
第8部9章
イント
MR-J3
シ
ーズ
MR-J4
シ
ーズの変更箇所につい
ま
めた表
す。
詳細につ
まし
,参照資料
項目をご覧く
い。
変更箇所 確認事項 影響 参照資料 項目
サーボ ータ 取付け互換 取付け互換 い機種 あ ます。 第7部 1.1節
外形寸法 全長 異 機種 あ ます。 第7部 2.1節
第7部 2.2節 第7部 2.3節
減速機 HF-KP,HF-MPシ ーズのG1タイプ HG-KRシ ーズのG1
タイプ ,実減速比 異 機種 あ ます。
第7部 2.3節 第7部 2.4節
慣性 ー ント HF-_P/HC-_P/HA-_P ータ HG ータ ,慣性 ー
ント 異 機種 あ ます。(注2)
第7部 2.5節
負荷慣性 ー ント比 HF-_P/HC-_P/HA-_P ータ HG ータ ,サーボ ー
タに対す 負荷慣性 ー ント比の範 異 機種 あ
ます。
第7部 2.5節
コネクタ 電源,エンコー び電磁 ーキコネクタの形状 異
機種 あ ます。
第7部 2.6節
トルク特性 HF-_P/HC-_P/HA-_P ータ HG ータ ,トルク特性
異 機種 あ ます。
第7部 2.7節 定格回転速度/最大回転速度 HF-_P/HC-_P/HA-_P ータ HG ータ ,定格回転速
度/最大回転速度 異 機種 あ ます。
サーボ ータ技術 資料集 (第3集)
サー ルセンサ (注1) HG-JR 1000 r/minシ ーズ 15 kW以上,HG-JR 1500 r/minシ
ーズ 22 kW以上の機種 サー ルセンサ サー スタ
へ変更し ます。また,HG-JR 1000 r/minシ ーズ12
kW以 ,HG-JR 1500 r/minシ ーズ 15 kW以 の機種 ,
サー ルセンサ く ます。
サーボ ータ技術 資料集 (第3集)
エンコー 分解能 次の にエンコー 分解能 違います。
HF-_P/HC-_P/HA-_P ータ: 18ビットABS
HG ータ: 22ビットABS
サーボ ータ技術 資料集 (第3集) コント ーラ
(SSCNETイン
タ ースの
み)
MR-J4-_B_サーボアンプ ,MR-J4の機能 び性能をす
使用 "J4 ー " ,従来のMR-J3-_B_シ ーズ 互
換 あ "J3互換 ー " の2つの運転 ー を搭載し いま
す。
工場出荷状態 初回コント ーラ通信時にSSCNETⅢ/H通信 接続した場合 "J4 ー " ,SSCNETⅢ通信 接続した場
合 "J3互換 ー " 運転 ー 固定 ます。
注 1. HG-JR 1000 r/minシ ーズ 15 kW以上,HG-JR 1500 r/minシ ーズ 22 kW以上の機種 サー ルセンサ サー スタへ
変更し ます。また,HG-JR 1000 r/minシ ーズ12 kW以 ,HG-JR 1500 r/minシ ーズ 15 kW以 の機種 ,サー
ルセンサ く ます。 ータサー ル配線 異 ますの ,新規エンコー ケー ルの敷設 必要 ます。
3.1.4 MR-J3W
シ
ーズ
MR-J4
シ
ーズへの変更箇所
変更箇所 確認事項 影響 参照資料 項目
サーボアンプ コネクタ コネクタの形状, ン配置,信号略称 び 置 違いま
す。
第4部 3.6節
第6部 1.2.2項
パラ ータ SSCNETⅢインタ ース MR-J4シ ーズにMR-J3互換
ー 用意 い ため,パラ ータ変更 不要 す。
第4部 3.7節
外形寸法 MR-J3W-22B/-44B ⇒ MR-J4W2-22B/-44B
: 外形寸法 同一 す。取付け の本数 異 ます。
MR-J3W-77B/-1010B ⇒ MR-J4W2-77B/-1010B
: 外形サイズ小型化のため取付け の 置 (間隔) び
の本数 変更 いますの ,ご注意く い。
MR-J3W-0303BN6 ⇒ MR-J4W2-0303B6
: 外形寸法,取付け 間隔,本数 も同一 す。
第6部 2.1.5項
イ ック ーキ惰走量 サーボ ータの イ ック ーキ惰走量 違います。 第6部 1.2.3項
強制停止減速 MR-J4の場合,出荷状態 強制停止時 びアラーム発生時
にサーボ ータ 減速停止します。MR-J3Wの非常停止また
強制停止有効時 停止方法 異 ます。
第6部 1.2.4項
MR-J4W2-_B_
サーボアンプ 技術資料集
イニシ ライズ時間 電源投入 サーボオン受付ま の時間 異 ます 第6部 1.2.6項
オプション 周辺機器
ー ューズ遮断器 ューズ
MR-J3W用 使用 い場合 あ ます。MR-J4用を選定
し く い。
第8部 4.3節
電磁接触器 MR-J3W用 使用 い場合 あ ます。MR-J4用を選定
し く い。
第8部 4.3節
力率改善AC アクトル MR-J3W用 使用 い場合 あ ます。FR-HALを推奨し
ます。
第8部 7.2節 第8部 7.5節
回生オプション 一部の回生オプション ,MR-J4 使用 ませ 。 第8部 1章
セットアップソ ト エア
(SETUP221)
MR-J4 , セットアップソ ト エア (SETUP221) 使
用 ませ 。
MR-J4シ ーズ びMR-J3Wシ ーズに , MR
Configurator2 ご使用いた けます。
第8部 8章
ッテ MR-J4用のMR-BT6VCASE,MR-BAT6V1を使用し く
い。
第8部 5章
エンコー ケー ル MR-J3W用のケー ルをそのまま使用 ます。 第6部 1.2.2項
第8部 3章
電線 MR-J4 HIV電線を推奨し います。 第8部 4章
EMC ルタ 一部のEMC ルタ ,MR-J4 使用 ませ 。 第8部 6章
イント
変更箇所 確認事項 影響 参照資料 項目
サーボ ータ 取付け互換 取付け互換 い機種 あ ます。 第7部 1.1節
外形寸法 全長 異 機種 あ ます。 第7部 2.1節
第7部 2.2節 第7部 2.3節
減速機 HF-KP,HF-MPシ ーズのG1タイプ HG-KRシ ーズのG1
タイプ ,実減速比 異 機種 あ ます。
第7部 2.3節 第7部 2.4節
慣性 ー ント HF-_P/HC-_P ータ HG ータ ,慣性 ー ント 異
機種 あ ます。(注)
第7部 2.5節
負荷慣性 ー ント比 HF-_P/HC-_P ータ HG ータ ,サーボ ータに対す
負荷慣性 ー ント比の範 異 機種 あ ます。
第7部 2.5節
コネクタ 電源,エンコー び電磁 ーキコネクタの形状 異
機種 あ ます。
第7部 2.6節
トルク特性 HF-_P/HC-_P ータ HG ータ ,トルク特性 異
機種 あ ます。
第7部 2.7節 定格回転速度/最大回転速度 HF-_P/HC-_P ータ HG ータ ,定格回転速度/最大
回転速度 異 機種 あ ます。
サーボ ータ技術 資料集 (第3集)
エンコー 分解能 次の にエンコー 分解能 違います。
HF-_P/HC-_P ータ: 18ビットABS
HG ータ: 22ビットABS
サーボ ータ技術 資料集 (第3集) コント ーラ
(SSCNETイン
タ ースの
み)
MR-J4W2-_Bサーボアンプ ,MR-J4の機能 び性能をす
使用 "J4 ー " ,従来のMR-J3W-_Bシ ーズ
互換 あ "J3互換 ー " の2つの運転 ー を搭載し い
ます。
工場出荷状態 初回コント ーラ通信時にSSCNETⅢ/H通信 接続した場合 "J4 ー " ,SSCNETⅢ通信 接続した場
合 "J3互換 ー " 運転 ー 固定 ます。
3.2
置換え検討
3.2.1
置換え前システムの確認
置換え前システムの構成機器を確認します。
分類 コント ーラ形名 アンプ形名 本 参照項目 備考
置決めユニット
QD75P(D)
MR-J3_A_
⇒
MR-J3シ ーズ
第2部 MR-J3-_A_ MR-J4-_A_へ
の置換え検討
MR-J3シ ーズ
第5部 MR-J3-DU_ MR-J4-DU_
への置換え検討
置決め制御
A1SD75P(D)
他社コント ーラ 他社コント ーラ MR-J3_A_
⇒
コント ーラ接続 し コント ーラ し MR-J3-_A_
⇒
速度,トルク制御SSCNETⅢ
置決めユニット
QD75MH MR-J3-_B_
MR-J3W-_B
⇒
MR-J3シ ーズ
第3部 MR-J3-_B_ MR-J4-_B_へ
の置換え検討
MR-J3Wシ ーズ
第4部 MR-J3W-_B MR-J4W2-_B
への置換え検討
MR-J3シ ーズ
第5部 MR-J3-DU_ MR-J4-DU_
への置換え検討
置決め制御
SSCNETⅢ
ーション コント ーラ
Q17_HCPU
MR-J3-_B_
MR-J3W-_B
⇒
Q170MCPU
Q17_DCPU
3.2.2
基本置換え機種の決定
(1) MR-J3
シ
ーズ
⇒
MR-J4
シ
ーズ
置換え機種形名
サーボアンプ
びサーボ
ータのセット
置換えを前提
した基本置換え機種を示します。
(a)
汎用インタ
ース
200 V
級
形名 代替機種形名例
取付け互換
(○: 互換有)
確認事項
MR-J3-10A MR-J4-10A ○
第6部共通資料 を参照し く い
MR-J3-20A MR-J4-20A ○
MR-J3-40A MR-J4-40A ○
MR-J3-60A MR-J4-60A ○
MR-J3-70A MR-J4-70A ○
MR-J3-100A MR-J4-100A ○
MR-J3-200A(N)(-RT) MR-J4-200A ○
MR-J3-350A MR-J4-350A ○
MR-J3-500A MR-J4-500A (注)
MR-J3-700A MR-J4-700A ○
MR-J3-11KA
MR-J4-11KA (注)
MR-J3-11KA-LR
MR-J3-15KA
MR-J4-15KA (注)
MR-J3-15KA-LR
MR-J3-22KA MR-J4-22KA ○