時間整 基 振動解析法
― 路面状態 開発―
花塚泰
博士 学術
総 研究大学院大学
複 科学研究科 統計科学専攻
24 度
i
目次
第 1 章 1
1.1 研 究 背 ... 1
1.2 本 論文 構 ... 3
第 2 章 行 研 究 概 説 本 研 究 目 的 4
2.1 行 研 究 構 ... 4
2.2 行 研 究 採 用 振 動 波 形 特 徴 定 法 ... 5
2.3 行 研 究 開 発 ... 6
2.4 行 研 究 実 結 果 ... 7
2.5 行 研 究 問 題 灎 本 研 究 目 的 ... 7
第 3 章 振 動 波 形 特 徴 9
3.1 動 的 挙 動 振 動 波 形 対 比 ... 9
3.2 路 面状 態 変 振 動 波 形 変 ... 13
3.3 振 動 波 形 特 徴 定 法 ... 30
第 4 章 隠 振 動 路 面 状 態 方 法 33
4.1 隠 ... 334.1.1 ... 33
4.1.2 隠 定 式 ... 34
4.1.3 EM ... 36
4.2 HMM 振 動 方 法 ... 40
4.3 実 ... 44
4.3.1 実 方 法 ... 44
4.3.2 HMM 状 態 推 定 ... 47
4.3.3 HMM 基 手 法 精 度 ... 49
ii
4.3.4 性 検 証 ... 57
4.3.5 力 確 率 数 用 い GMM 混 数 影 響 ... 67
4.4 章 考 察 ... 76
第 5 章 法 用 い 振 動 路 面 状 態 方 法 78
5.1 法 ... 78
5.1.1 ン ... 78
5.1.2 GA ... 88
5.2 法 用 い 方 法 ... 90
5.3 実 ... 93
5.3.1 GA 用 い 手 法 精 度 ... 94
5.3.2 性 検 証 ... 100
5.4 章 考 察 ... 116
第 6 章 結 論 119
付 録 交 差 確 認 法 法 設 定 121
1
第 1 章 めに
1.1 研究 背景
23 2011 版 警 察 書 日 本 国 2010 中 交
通 故 死 者 数 4,863 人 10 連 続 減 少 1952 来
57 ぶ 4 千 人 2009 更 回 交 通 故 発 生 件 数
及 び 負 傷 者 数 6 連 続 減 少 負 傷 者 数 16 ぶ 90 万 人
[1] 背 法 整 備 着 用 率 昇 や 悪 質 運 転 減 少
や 衝 突 全 故 発 生 時 人 体 影 響 最 限 抑
え 技 術 ABS Anti lock Brake System 車 輪 固 着 防 装 置 や ESC Electronic Stability Control 横 滑 防 装 置 故 未 然 防
技 術 い う 車 両 全 技 術 向 あ 全 交 通
社 会 実 現 2011 府 策 定 第 9 交 通 全 基 本 計 画
2015 交 通 故 死 者 数 3,000 人 い う 目 標 掲
い 遉 車 両 全 性 確 保 必 要 あ 明 記
[2] 特 技 術 更 発 展 及 あ
技 術 国 土 交 通 省 各 車 両 参 画
逭 全 自 動 車 ASV 推 逭 検 討 会 技 術 開 発 実 用 及 検 討
多 技 術 各 車 両 製 品 載 [3]
技 術 表 車 両 制 御 技 術 高 度 複 雑 車 両 動 的 挙 動 や 周
辺 環 境 ン ン ン や ECU Electronic Control Unit 電 子 制 御 装 置 情 報 処 理 装 置 車 両 外 部 通 信 装 置 数 多 車 載 電 子
実 現 い 車 輪 速 ン や 速 度 ン
ン 等 情 報 用 い 車 両 挙 動 や 路 面 滑 や 推 定 制 御
い [4] [5] [6] [7] 数 万 灎 及 ぶ 自 動 車 部 品 唯 一 路 面 接
い ン ン 機 能 付 車 両 挙 動 や 路 面 状 態
確 把 握 考 え 近 計 測 技 術 向 直
接 電 子 装 着 高 速 回 転 物 理 計 測 車 両 転
送 能 空 気 温 度 計 測 情 報 車
両 無 線 送 信 TPMS Tire Pressure Monitoring System 空 気 視
実 用 や 新 車 装 着 義 務 付
い [8] [9] 速 度 や 歪 い 動 的 物 理 得 技 術
2
研 究 各 社 や 各 研 究 機 い 行 わ う ン
ン 機 能 持 技 術 ン ン 呼 い [10] [11]
[12] 側 面 部 変 形 直 接 的 計 測 力 推 定
最 初 期 ン ン 技 術 あ [13] ン
面 MEMS(Micro Electro Mechanical Systems)式 3 軸 速 度 ン 付
力 波 形 力 空 気 路 面 水 膜 有 無 推 定
提 案 い
う 力 推 定 技 術 路 面 状 態 滑 や
推 定 技 術 提 案 い 路 面 状 態 や 路 面 滑 や
車 両 全 性 確 保 要 情 報 あ 述 う 間 接
的 推 定 直 接 的 精 度 良 推 定 求
い
APOLLO-project(活 動 期 間 2002 2005 ) EC(European Commission 欧
州 委 員 会) 主 自 動 車 や 電 装
大 学 等 研 究 機 参 ン ン 開 発 及 び 利
活 用 研 究 あ 最 終 報 告 書 [10] い
学 ン 用 い ン ン 提 案 い 学
ン ン ン ン 部
LED(Light Emitting Diode) 付 源 変 気 室 側 付
表 面 抵 抗 利 用 2 元 置 検 器 検
ン 面 変 変 換 3 方 向 力 推 定
推 定 路 面 水 方 向 力 対 垂 直 方 向 力 比 路 面
間 摩 擦 係 数 算 あ [14]
[15] SAW(Surface Acoustic Wave 弾 性 表 面 波 ) ン
動 測 定 う 構 い わ ン ン
面 部 向 挿 入 ン 曲 変 形 SAW ン
検 構 造 い 変 形 評 価 路 面
摩 擦 係 数 推 定
筆 者 面 速 度 ン 付 力 路 面 状
態 変 見 逆 問 題 振 動 特 徴 定 常
走 行 中 路 面 状 態 技 術 開 発 行 [16] [17]
3
[18] 開 発 実 用 性 あ 精 度 一 方 多 様 ン
必 要 複 雑 い 課 題 あ 本 研 究 面
速 度 ン 波 形 特 徴 路 面 状 態 い う ン 踏 襲
一 般 自 動 車 載 う 簡 素 実 現
開 発 目 的
一 方 統 計 的 機 械 学 習 経 や 実 得 情 報 中 後 再 利 用
う 情 報 獲 得 過 程 自 動 的 行 う 技 術 あ 例 え ン 力
入 力 状 態 推 定 逆 問 題 1 解 法 統 計 学
や 応 用 数 学 学 や 産 業 界 注 目 い 本 研 究
う 機 械 学 習 や ン 認 識 等 統 計 的 手 法 枠 組 ン ン
開 発 応 用 簡 素 行 研 究 [16] [17]
[18] 等 精 度 各 種 外 乱 対 性 有 技 術 開 発 目 指
1.2 本論文 構成
第 2 章 述 行 研 究 [16] [17] [18] い 概 説 問 題 灎 整 理
本 研 究 目 的 明 確 第 3 章 本 論 文 提 案 適
用 対 象 あ 振 動 特 徴 動 的 挙 動 対 応 述 第
4 章 振 動 使 用 HMM Hidden Markov Model 隠
状 態 空 間 い 潜 変 数 持 確 率 解
釈 ワ 構 更 推 定
い 説 明 振 動 各 路 面 状 態 毎
方 法 い 述 第 5 章 SVM Support Vector Machine
ン 解 性 や 最 適
問 題 解 求 い 説 明 SVM 法
非 線 形 い う 一 般 的 解 釈 え 特 本 論 文 要 要 素 時
間 伸 縮 対 応 あ DTW Dynamic Time Warping 動 的 時 間 伸 縮
び GA Global Alignment 大 域 的 ン 特 徴
い 説 明 路 面 状 態 応 用 方 法 実 結 果 い 述 最 後 第
6 章 各 手 法 比 較 考 察 行 う
4
第 2 章 先行研究 概説 本研究 目的
本 章 筆 者 行 行 研 究 [16] [17] [18] い 概 説 問 題 灎 整 理 本 研 究 目 的 明 確
2.1 先行研究 シ ム構成
本 節 行 研 究 [16] [17] [18] 開 発 い 説 明 1
構 示
1 行 研 究 構
(a)給 電 ン (b) 電
2 ワ 給 電
回 転 体 あ ン 駆 動 灏 電 磁 誘 利 用 ワ
給 電 行 う 計 測 2 開 発 用 い い 2(a)
示 給 電 ン 1 前 輪 ン ン 部 固 定
5
間 隔 一 定 保 う い 面 部 2(b)
示 電 2 連 結 体 装 着 い 送 電 電 力 約 100mW
各 環 境 最 適 送 電 効 率 得 交 流 電 流 周 波 数 制 御 い
速 度 ン 1 軸 電 荷 力 周 1 箇 所 装 着 送 電 電 力
駆 動 ン 増 幅 信 号 無 線 送 信 装 置
ン 連 続 的 送 信 更 車
解 析 装 置 送 解 能 24bit ン ン
20kHz あ
速 度 発 生 音 計 測 ン
路 面 温 度 計 測 赤 外 温 度 計 大 入 力 検 ン
ン 部 速 度 ン 備 え ン 速 度 特 徴 現 い
う 薄 濡 い 程 度 路 面 検 赤 外 温 度 計 経 的
潤 状 態 得 い 状 況 定 い 悪 路 特 段 差 乗 越 状 況
い 誤 定 多 ン ン 部 速 度 ン 大 入 力
検 場 定 中 断 う い 265/65R17
あ
2.2 先行研究 採用 たタイヤ振動波形 特徴定量化法
述 得 振 動 波 形 路 面 状 態 毎 異 特 徴 持
3 各 路 面 状 態 走 行 中 得 振 動 波 形 例 示
(a) (b)凍 結 路 (c) 3 振 動 波 形 例
滑 乾 燥 路 面 い 時 速 20km/h 集 周 方 向 速 度 波
6
形 例 3(a) 示 2 接 地 面 端 部 間 接 地 面 あ
乾 燥 路 路 面 拘 束 力 強 い 接 地 面 動 少
振 動 い 特 徴 あ 一 方 3(b) 示 路 定 常 走 行 中
滑 頻 繁 起 接 地 面 高 周 波 振 動 発 生 傾 向
あ 滑 断 力 接 地 面 解 放
接 地 面 後 方 蹴 端 降 振 動 い い う 特 徴 有
3(c) 示 水 深 約 2mm 潤 路 面 水 膜
衝 突 接 地 前 方 踏 込 端 前 振 動 高 い
行 研 究 [16] [17] [18] 記 各 路 面 走 行 時 振 動 特 徴 定
灏 時 系 列 波 形 複 数 時 間 領 域 割 時 間 領 域 車 輪 速
変 確 窓 掛 車 輪 速 途 計 測 ン 幅 調
整 必 要 あ 後 割 時 系 列 用 い
各 領 域 特 定 周 波 数 域 振 動 求 特 徴 い 体 的 時 間
領 域 置 や 長 周 波 数 い 明 い い
2.3 先行研究 開発 た ア ム
2.2 説 明 特 徴 基 2 値 器 複 数 組 わ 4 示
う 乾 燥 深 い 潤 潤 路 4段 階 後 路
/積 雪 / 雪/凍 結 最 終 的 乾 燥/ 潤/
/積 雪 / 雪/凍 結 6 区 状 態 い 2 値 器 い 体 的
手 法 い 述 い い
4 定 Band Pass Filter
Wet Judgment 1
Wet
Low Friction Judge Wet Judgment 2
Ice or Snow Dry high
high
high
low
low Thick Water Film
very high
Measure Calculation
low Leve
Division of Data Stream
7
2.4 先行研究 実験結果
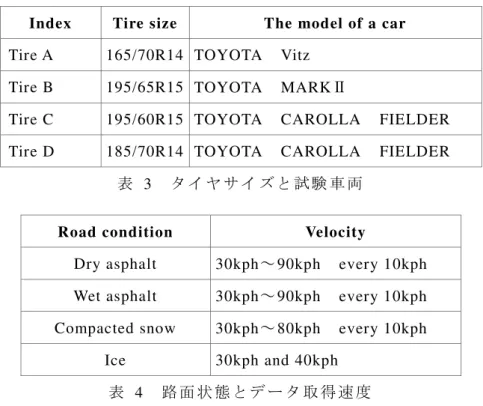
精 度 検 証 冬 季 2 ン 第 1 季 2008/12-2009/3 第 2 季 2009/12-2010/3 公 遈 試 実 施 い 街 地 郊 外 線 遈 路 山
間 部 含 100km 程 度 2 設 定 逬 3 5 日 走 行 精 度 求
実 車 両 運 転 者 外 目 視 定 員 乗 500m 程 度 区 間 毎
目 視 定 結 果 目 視 対 定 結 果 誤 状 況 等 ○ 答 搬
誤 答 △ 答 誤 答 半 数 3 段 階 定 答 ○
1 誤 混 △ 0.5 ン 定 総 数 答 率
各 路 面 毎 ン 毎 比 較 結 果 5 示 第 1 季 特
雪 精 度 第 2 季 精 度 大 向
ン 通 均 答 率 第 1 季 74% 第 2 季 82% 向 [17] [18]
実 用 性 大 向 評 い
5 行 研 究 答 率
2.5 先行研究 問題点 本研究 目的
述 う 行 研 究 [16] [17] [18] 振 動 特 徴 捉 え 実 用 能 性
あ 精 度 路 面 状 態 提 案 一 般 自 動 車
装 着 想 定 う 問 題 灎 あ
1. 車 輪 速 や 複 数 ン や 情 報 必 要 あ 複 雑
開 発 増 大 招 い い
各路面 答率
0 10 20 30 40 50 60 70 80 90 100
乾燥 潤 シャ ベ ト 積雪 雪 凍結 混
08-0重冬季 0重-10冬季
8
2. 1 1 ン 溝 ン 対 応
い
行 研 究 [16] [17] [18] 冬 季 遈 路 管 理 い う 特 用 途 適 用 想 定
路 面 状 態 多 様 あ 精 度 最 要 視 い
起 因 あ
本 研 究 一 般 車 両 装 着 路 面 状 態 開 発
目 的 車 輪 速 車 両 側 情 報 必 要 振 動 情 報 定 常 走
行 中 路 面 状 態 方 法 提 案 車 種 や
趣 向 わ 多 様
性 い 議 論 最 開 発 得 学 習 や
数 大 幅 削 減 一 学 習 異 複
数 対 応 目 指
章 本 研 究 扱 う 振 動 特 徴 説 明 述 う 行 研
究 問 題 解 決 目 的 遉 解 技 術 課 題 明 確
9
第 3 章 タイヤ振動波形 特徴
本 章 本 研 究 扱 う 振 動 う 要 因 影 響 変
動 的 挙 動 や 路 面 状 態 変 結 び 付 説 明 本
研 究 解 技 術 課 題 明 確 波 形 特 徴 定 手 法
い 説 明
3.1 タイヤ 動的挙動 振動波形 対比
本 節 走 行 中 振 動 波 形 特 徴 路 面 間 相 互 作 用
動 的 挙 動 対 応 説 明
有 機 繊 維 や 挟 積 層 構 造
縮 空 気 充 填 路 面 接 地 荷 構 造 物 剛
性 空 気 決 特 性 基 変 形 [19] 回
転 変 形 周 置 連 続 的 移 動 面
任 意 一 灎 電 式 速 度 ン 付 計 測 波 形 述
う 回 転 伴 う 動 的 接 地 状 態 変 映 非 定 常 性 強 い 波 形 示
6 検 軸 方 向 逭 行 方 向 場 波 形 例 接 地 状
態 係 示 あ 巨 視 的 路 面 押
部 屈 曲 ン 軌 遈 運 動 外 起 因 路 面 踏 込
蹴 対 応 置 い 波 形 現 走 行 中 振 動
計 測 う 変 形 基 比 較 的 周 波 振 動 波 形
路 面 衝 突 起 因 や ン 路
面 間 滑 起 因 振 動 比 較 的 高 周 波 振 動 算 波 形 得
発 高 周 波 振 動 一 部 空 気 伝
音 減 振 動 動 的 挙 動 結 び 付
様 々 研 究 [19] [20] 路 面 間 相 互 作 用
入 力 振 動 う 大 [20] 1 ン 溝
ン 入 力 あ 横 溝 回 転 い 周 期 的
路 面 接 触 速 度 応 特 定 周 波 数 振 動 入 力
実 際 ン 横 溝 周 方 向 間 隔 複 数 種 類 用 意
振 動 散 う 数 Hz
域 あ 基 本 周 波 数 周 現 2 目 路 面 入 力
10
あ 2 入 力 考 慮 実 際 走 行 時 振 動 び
音 近 い 構 築 [20] 7 ン 入 力
路 面 入 力 振 動 起 因 音 予 測
あ 路 面 踏 込 蹴 時 路 面 衝 突 う 現
路 面 細 算 い え
路 面 間 滑 入 力 あ 8 示 う 自 転 動 中
表 面 部 部 相 対 変 発 生 接 地
面 蹴 側 滑 伴 路 面 脱 滑 高 周 波 振 動 発 生
蹴 時 記 相 対 変 剪 断 力 解 放 蹴
後 固 有 振 動 入 力 一 [16] [17]
[18] 入 力 路 面 状 態 変 い
[16] [17] [18] ン 入 力 数 Hz 周 波 数
持 路 面 雪 や 水 膜 い 衝 撃 緩 衝 あ 場
路 面 入 力 1kHz 周 波 数 現 相 互 作 用
対 象 雪 異 滑 や い 路 面
状 態 接 地 面 微 滑 生
1kHz 高 周 波 振 動 生 い 蹴 後 現
固 有 振 動 1kHz 2kHz 付 近 あ 大 蹴
時 蓄 え い 剪 断 力 依 摩 擦 係 数 蹴 前
剪 断 力 徐 々 開 放 う 条 件 う
生 入 力 基 振 動 い 章 体 的 計 測 例
示 路 面 状 態 変 結 び 付 説 明
11
6 接 地 挙 動 振 動 波 形 周 方 向 係
7 ン 入 力 路 面 入 力 考 慮 振 動 予 測
Contact Patch
Leading Edge Trailing Edge Rotation
12
8 接 地 面 部 相 対 変
13
3.2 路面状態変化によ タイヤ振動波形 変化
前 節 走 行 中 振 動 波 形 特 徴 路 面 間 相 互 作 用
動 的 挙 動 対 応 説 明 本 節 動 的 挙 動 様 々 路 面
状 態 い 変 結 果 振 動 波 形 特 徴 う 変
説 明 9 雪 路 凍 結
路 時 速 30km 走 行 時 振 動 波 形 あ
路 面 接 触 前 水 膜 衝 突 波 形 現 接 地
時 前 時 間 置 細 振 動 比 増 大
い 一 方 雪 路 や 凍 結 路 本 得 条 件
い 路 面 性 状 滑 あ 比 全 体 的 波 形 細
振 動 い え 路 面 摩 擦 係 数 い 雪 路 や 凍 結 路
路 面 接 地 い 面 接 地 面 働 剪 断 力 い 路 面 蹴
時 剪 断 力 開 放 伴 発 生 固 有 振 動 励 起
い 蹴 時 現 後 時 間 置 振 動
い 考 え
14 -20 -10 0 10 20
0.05 0.07 0.09 0.11
acceleration[G]
time[sec]
(a) (b)
(b) 雪 路 (d) 凍 結 路
9 各 路 面 状 態 走 行 時 振 動 波 形 例
う 波 形 特 徴 周 波 数 軸 比 較 10
雪 路 凍 結 路 時 速 30km 走 行 中 ン
ン 10kHz 計 測 振 動 波 形 ワ あ 周
波 数 解 能 10Hz あ -20
-10 0 10 20
0.05 0.07 0.09 0.11
acceleration[G]
time[sec]
-20 -10 0 10 20
0.05 0.07 0.09 0.11
acceleration[G]
time[sec]
-20 -10 0 10 20
0.05 0.07 0.09 0.11
acceleration[G]
time[sec]
15
(a) 比 較
(b) 雪 路 比 較
(c) 凍 結 路 比 較
10 各 路 面 状 態 走 行 時 振 動 FFT 波 形 例
-80 -70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ ッ
-80 -70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 圧雪
-80 -70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 凍結
16
10(a) 2kHz 周 波 数 述 水 膜 衝 突
昇 10(b) び 10(c) 1kHz 周 波 数
差 前 述 路 面 滑 性 固 有 振 動
起 因 考 え う 波 形 特 徴 更 細 調
時 速 30km/h 走 行 時 振 動 波 形 表 例 2.1 節 述
接 地 挙 動 考 慮 経 的 定 所 定 領 域 割 窓 掛
い ワ 調 11 ン 置 例 示
ン 置 路 面 蹴 時 発 生 基 準 表 1 示 う
設 定
11 振 動 波 形 ン 置 例
番 号 称 ン 置 基 準
踏 込 前 踏 置 前 方
踏 込 踏 置 包 含
接 地 面 踏 蹴 間
蹴 蹴 置 包 含
蹴 後 蹴 置 後 方
表 1 ン 置 設 定
-20 -10 0 10 20
-0.03 -0.02 -0.01 0 0.01 0.02
acceleration[G]
time[sec]
17
(a) 踏 込 前 領 域 比 較 (b) 踏 込 領 域 比 較
(c) 接 地 面 領 域 比 較 (d) 蹴 領 域 比 較
(e) 蹴 後 領 域 比 較
12 各 領 域 FFT 比 較
-80 -70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ ッ
-80 -70 -60 -50 -40 -30 -20
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ ッ
-80 -70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ ッ -80
-70 -60 -50 -40 -30 -20
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ ッ
-70 -60 -50 -40 -30 -20
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ ッ
18
(a) 踏 込 前 領 域 比 較 (b) 踏 込 領 域 比 較
(c) 接 地 面 領 域 比 較 (d) 蹴 領 域 比 較
(e) 蹴 後 領 域 比 較
13 FFT 対 t 検 定
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz] 0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
19
(a) 踏 込 前 領 域 比 較 (b) 踏 込 領 域 比 較
(c) 接 地 面 領 域 比 較 (d) 蹴 領 域 比 較
(e) 蹴 後 領 域 比 較
14 各 領 域 ARMA 比 較
-90 -80 -70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ ッ
-90 -80 -70 -60 -50
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ ッ
-90 -80 -70 -60 -50 -40
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ ッ -80
-70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ ッ
-70 -60 -50 -40 -30 -20
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ ッ
20
(a) 踏 込 前 領 域 比 較 (b) 踏 込 領 域 比 較
(c) 接 地 面 領 域 比 較 (d) 蹴 領 域 比 較
(e) 蹴 後 領 域 比 較
15 ARMA 対 t 検 定
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz] 0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
21
(a) 踏 込 前 領 域 比 較 (b) 踏 込 領 域 比 較
(c) 接 地 面 領 域 比 較 (d) 蹴 領 域 比 較
(e) 蹴 後 領 域 比 較
16 各 領 域 雪 FFT 比 較
-80 -70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 圧雪
-80 -70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 圧雪
-90 -80 -70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 圧雪 -80
-70 -60 -50 -40 -30 -20
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 圧雪
-70 -60 -50 -40 -30 -20
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 圧雪
22
(a) 踏 込 前 領 域 比 較 (b) 踏 込 領 域 比 較
(c) 接 地 面 領 域 比 較 (d) 蹴 領 域 比 較
(e) 蹴 後 領 域 比 較
17 雪 FFT 対 t 検 定
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz] 0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
23
(a) 踏 込 前 領 域 比 較 (b) 踏 込 領 域 比 較
(c) 接 地 面 領 域 比 較 (d) 蹴 領 域 比 較
(e) 蹴 後 領 域 比 較
18 各 領 域 雪 ARMA 比 較
-100 -90 -80 -70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 圧雪
-90 -80 -70 -60 -50
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 圧雪
-100 -90 -80 -70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 圧雪 -80
-70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 圧雪
-80 -70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 圧雪
24
(a) 踏 込 前 領 域 比 較 (b) 踏 込 領 域 比 較
(c) 接 地 面 領 域 比 較 (d) 蹴 領 域 比 較
(e) 蹴 後 領 域 比 較
19 雪 ARMA 対 t 検 定
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz] 0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
25
(a) 踏 込 前 領 域 比 較 (b) 踏 込 領 域 比 較
(c) 接 地 面 領 域 比 較 (d) 蹴 領 域 比 較
(e) 蹴 後 領 域 比 較
20 各 領 域 凍 結 FFT 比 較
-100 -90 -80 -70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 凍結
-80 -70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 凍結
-90 -80 -70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 凍結 -80
-70 -60 -50 -40 -30 -20
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 凍結
-80 -70 -60 -50 -40 -30 -20
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 凍結
26
(a) 踏 込 前 領 域 比 較 (b) 踏 込 領 域 比 較
(c) 接 地 面 領 域 比 較 (d) 蹴 領 域 比 較
(e) 蹴 後 領 域 比 較
21 凍 結 FFT 対 t 検 定
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz] 0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
27
(a) 踏 込 前 領 域 比 較 (b) 踏 込 領 域 比 較
(c) 接 地 面 領 域 比 較 (d) 蹴 領 域 比 較
(e) 蹴 後 領 域 比 較
22 各 領 域 凍 結 ARMA 比 較
-100 -90 -80 -70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 凍結
-100 -90 -80 -70 -60 -50
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 凍結
-100 -90 -80 -70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 凍結 -80
-70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 凍結
-80 -70 -60 -50 -40 -30
0 1000 2000 3000 4000 5000
振動ベ[dBA]
周波数[Hz]
ライ 凍結
28
(a) 踏 込 前 領 域 比 較 (b) 踏 込 領 域 比 較
(c) 接 地 面 領 域 比 較 (d) 蹴 領 域 比 較
(e) 蹴 後 領 域 比 較
23 凍 結 ARMA 対 t 検 定
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz] 0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
0 0.1 0.2 0.3 0.4 0.5
0 1000 2000 3000 4000 5000
p値
周波数[Hz]
29
12 各 領 域 FFT
比 較 あ 1 回 転 毎 算 均
灎 数 204 灎 66 灎
あ 13 12 基 t 検 定 行 結 果 あ 周 波 数 算
p 値 示 い 波 形 特 徴 現
述 う 水 膜 衝 突 支 配 的 あ 踏 込 前 領
域 や 踏 込 領 域 特 徴 差 大 い 水 膜 衝 突
高 周 波 伝 接 地 面 領 域 や 蹴 領 域 高 周 波 域 特 徴 差
絶 対 踏 込 前 領 域 比 い 14 び 15
様 各 領 域 ARMA
比 較 び 結 果 基 t 検 定 行 結 果 あ AR
数 MA 数 15 特 徴 FFT 様 踏 込
前 領 域 や 踏 込 領 域 特 徴 差 大 接 地 面 領 域 や
蹴 領 域 高 周 波 域 特 徴 差 絶 対 踏 込 前 領 域
比 い 16 雪 路 FFT 比 較
結 果 あ 雪 灎 数 180 灎 あ 17 16 基 t
検 定 行 結 果 あ 踏 込 領 域 2kHz 高 周 波 域 雪
昇 摩 擦 係 数 及 び 路 面 表 面 細
増 大 接 地 性 路 面 踏 込 際 生 滑 増
大 滑 起 因 高 周 波 振 動 増 大 考 え 一 方 蹴
領 域 や 蹴 後 領 域 逆 雪 高 周 波 域 い
様 摩 擦 係 数 伴 い 蹴 時 解 放 剪 断 力 蹴
時 励 起 固 有 振 動 減 少 考 え
18 び 19 示 ARMA 様 傾 向 20
凍 結 路 FFT 比 較 結 果 あ 凍 結
灎 数 73 灎 あ 21 20 結 果 基 t 検 定 行 結 果
あ 踏 込 領 域 大 遊 い い 接 地 面 領 域 後 領 域
凍 結 路 500Hz い 22 び 23 示
ARMA 様 あ 要 因 述 雪 路 面 特 徴 様
蹴 時 励 起 固 有 振 動 減 少 考 え
う 振 動 波 形 特 徴 路 面 状 態 応 特 定 周 波 数
現 一 方 路 面 踏 込 や 接 地 蹴 い 接 地 挙 動 応
30
時 系 列 的 変 本 研 究 目 的 確 路 面 状 態
考 慮 振 動 波 形 特 徴 定 行 う び 特 徴
用 い 適 ン 手 法 構 築 課 題 あ
3.3 タイヤ振動波形 特徴 定量化法
本 研 究 述 う 周 波 数 現 振 動 特 徴
用 い 手 法 び Cepstrum 係 数 定 Cepstrum [21]
[22] 音 声 認 識 等 適 用 い 信 号 処 理 手 法 あ あ 時 系 列
得 信 号 更 求 手 法 あ 3.1 節
説 明 う 高 路 面 走 行 時 対 路 面 走 行 時 振 動
蹴 後 振 動 波 形 固 有 振 動 数 対 応 周 波 数 現
高 や 幅 形 状 変 い う 特 徴 有 一 般
包 絡 微 細 構 造 特 徴 付 音 声 波 形 類
似 い 考 え 音 声 認 識 等 用 い LPC Cepstrum 記 振 動 特
徴 定 手 法 採 用 一 般 音 声 認 識 人 間 聴 覚 知 覚 特
性 あ わ 尺 度 [23] 呼 周 波 数 軸 考 え 本 研 究 対 象
振 動 あ 周 波 数 軸 採 用 本 節 体 的 特 徴 定
手 法 い 説 明
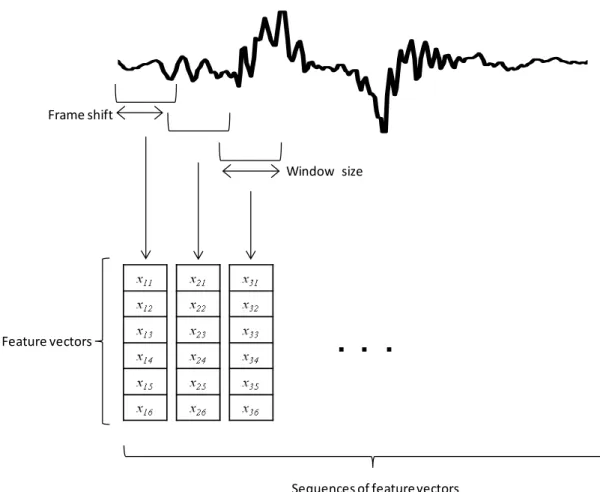
前 処 理 24 示 う 波 形 所 定 窓 長 周 期
窓 掛 用 い 手 法 表 2 示 特 性
過 波 形 時 系 列 ワ 値 均 値 特 徴
t 番 目 特 徴 x 式 え
(3-3-1)
s 特 性 ン 集 G 過 後 波 形 時 系 列 N
窓 含 数 あ 本 研 究 法 定 限 速 度 時 速 100km/h
3.1 及 び 3.2 節 述 振 動 波 形 時 系 列 的 特 徴 捉 え 窓 長
3[msec] 周 期 2[msec] 窓 数 ン 窓 用 い
録 10kHz ン ン 行 N 30 あ 本 研 究
N
i tsi
ts G
x N
1
1 2
31
表 2 示 6 特 性 異 使 用 い 特 徴
元 数 6 あ
24 振 動 波 形 特 徴 定 過 程
Type FIR/IIR Low cutoff freq[Hz] High cutoff freq[Hz] Order
Low-pass IIR 500 - 5
Band-pass IIR 500 1000 5
Band-pass IIR 1000 2000 5
Band-pass IIR 2000 3000 5
Band-pass IIR 3000 4000 5
Band-pass IIR 4000 5000 5
表 2 特 性
・ ・ ・
Window size Frame shift
Feature vectors
Sequences of feature vectors
32
一 方 LPC Cepstrum 線 形 予 測 線 形 予 測 係 数 最 尤
法 求
(3-1-2)
xs 時 刻 s 入 力 時 系 列 値 a 線 形 予 測 係 数 m 線 形 予 測
数 あ 係 数 列 a 入 力 信 号 自 己 相 係 数 求
LPC Cepstrum 係 数 c う 算
(3-1-3)
n 数 あ 本 研 究 m=15 n=7 7 個
係 数 ワ 値 え 8 個 特 徴 い
1 差 2 差 計 24 元 特 徴
本 節 解 技 術 課 題 一 あ 振 動 波 形 特 徴 定 法 い
述 章 び 第 5 章 述 特 徴 用 い 振 動 波 形
手 法 基 路 面 方 法 い 説 明 章 HMM
基 手 法 い 説 明
i s m
i i
s
a x
x
1
i n n
i
i n
n n i ac
a n
c
1
1
) 1 (
33
第4章 隠 マ フ モ に よ タ イ ヤ 振 動 モ
化 路面状態 方法
本 章 HMM 基 礎 概 説 後 振 動 び
基 路 面 状 態 方 法 い 体 的 説 明
4.1 隠 マ フモ
HMM 状 態 空 間 潜 変 数 性 有 且 散 変 数 あ
観 測 値 対 応 潜 変 数 状 態 条 件 仮 定 あ
[24] 状 態 遤 移 確 率 的 表 現 時 間 軸 伸 縮 う 信 号
ン 認 識 適 い 手 法 あ 近 実 用 急 速 及 音 声 認
識 や 自 然 言 語 処 理 時 間 や 速 異 信 号 比 較 必 要 あ
HMM 応 用 手 法 数 多 研 究 発 展 [25] 本 研 究 前 章
述 う 車 輪 速 動 的 変 且 時 間 伸 縮 振 動
HMM 検 討 行 本 節 HMM 基 本 構 方 法 い
述
4.1.1 [26]
系 列 扱 う 場 観 測 値 間 相 捉 え 構 造 う
独 立 仮 定 緩
柔 軟 性 高 最 単 純 一
あ
T 個 観 測 値 系 列 O={o1, o2, … ,oT} え 時 確 率 乗 法 定 理 用 い
)
,
,
,
|
(
)
(
)
,
,
,
(
1 2 11 2 2
1
T t tT
P o
tP o o o o
o
o
o
P
(4-1-1)表 各 観 測 値 直 前 観 測 値 外 独 立 あ
仮 定 25 示 一 連 鎖 得
)
|
(
)
(
)
,
,
,
(
11 2 2
1
T t tT
P o
tP o o
o
o
o
P
(4-1-2)34
各 観 測 値 直 前 観 測 値 条 件 い 実 際 問
題 い 過 去 観 測 値 影 響 味 必 要 あ 場 高
連 鎖 考 え 例 え 連 鎖 時 確 率
)
,
|
(
)
|
(
)
(
)
,
,
,
(
1 21 2 2 1 2
1
T t t tT
P o P o o
tP o o o
o
o
o
P
(4-1-3)様 4-3 式 M 連 鎖 拡 張 能 あ
確 率 乗 法 定 理 用 い 展 開 T 個 観 測 値 え 観
測 値 oT 条 件 付 確 率 式 表
)
,
,
,
|
(
)
,
,
,
|
( o
To
1o
2o
T 1P o
To
T 1o
T 2o
T MP
(4-1-4)う M あ 観 測 値 前 M 個 観 測 値
条 件 い M 値 増 や 柔 軟 性 償
数 急 激 増 大 M 値 問 題 応 適
決 定 必 要 あ
25 一 連 鎖
4.1.2 隠 定 式 [24] [26]
HMM 状 態 確 率 的 替 え 非 定 常 信 号 局 所 的 定 常
信 号 集 扱 う あ 音 声 認 識 [27] [28] [29] [30]や
文 認 識 [31] [32] DNA配 列 解 析 [33] [34]等 広 応 用 い
4.1.1 観 測 値 連 鎖 い 述 観 測 値 対 応
潜 変 数 入 連 鎖 構 潜 変 数 あ 仮 定
状 態 空 間 得 HMM 状 態 空 間 潜 変 数 散 変 数 あ
特 場 解 釈 時 観 測 変 数 各 状 態 毎 定 義
力 確 率 数 従 い 力 ン あ 力 ン 観 測
各 時 刻 状 態 確 率 的 観 測 い HMM θ 状態遤移
o1 o2 o3 o4
O={o
i}: Observations
35
11
) 1
)
((
T
t
t x x t
a
X
P
系 列 X {x1, x2,… , xT} θ え 観 測 値 系 列 O={o1,o2,… , oT} 尤 度
)
|
(
)
,
|
(
)
|
,
(
)
|
(
X X
X
P
X
O
P
X
O
P
O
P
(4-1-5)表 時 刻 t 状 態 x(t) 観 測 値 ot 力 確 率 数 bx(t)(ot)
P(O|X) う 表
(4-1-6)
観 測 変 数 ot 散 変 数 連 続 変 数 力 確 率 数 様 々 条 件 付
用 い 本 研 究 音 声 認 識 一 般 的 用 い GMM
Gaussian Mixture Model 混 [35] [36] 採 用
(4-1-7)
(4-1-8)
c GMM 混 比 M GMM 混 数 N( ; ,Σ) 均 散 共
散 行 列 Σ 多 変 あ
状 態 系 列 S={si} i 番 目 状 態 j 番 目 遤 移 確 率 aij
P(X)
(4-1-9)
(4-1-10)
表
初 期 状 態 確 率 πi
(4-1-11)
Tt t t
x
o
b
X
O
P
1
)
|
(
Mm
m t x m t x t m t x t t
x
o c N o
b
1
) ( ) ( )
(
( ; , )
1
b
x to
tdo
1
i
a
ij)
)
1
(
(
ii
P x s
36
(4-1-12)
あ 初 期 状 態 確 率 集 π={πi 状 態 遤 移 確 率 集 A={ai j}
力 確 率 集 B={ ,Σ} HMM θ (π,A,B) あ
M え 尤 度 式 4-1-5 式 4-1-6 式 4-1-9 入
う 得
(4-1-13)
26 HMM 構 造 示 状 態 数 開 始 状 態 終 了 状 態 含 5 状
態 あ 潜 変 数 2 性 有 い 構 造 あ
26 HMM 構 造
4.1.3 EM
前 説 明 HMM 尤 度 数 最 大 θ (π,A,B) 最尤推
定 求 効 率 的 枠 組 EM(Expectation Maximization)
あ EM 復 法 一 種 あ E(Expectation 期 待 値)
o
5I S1 S2 S3 F
{a
ij}:Transition Probability
{S
i}:States
{b
i(o
t)}:Output Probability
o
1{o
t}:Output Symbols
o
3o
4o
2 1
i
i
X
T
t
t x xt T
t t t
x
o a
b
O
P
M
O
P
1
1
) 1 ( 1
)
|
(
)
|
(
X
t x xt T
t t t x x
x
b o a
a
( 1)1 ) 1 ( ) 0 (