全天候型白線識別技術の開発及び実証
-第 2 報:高精度ミリ波レーダを用いたリブ式高輝度白線の検知性能検証-
Development and Verification of a Lane Marker Detection System in All-weather Conditions-Second Report : Verification of the detection of raised profile line markings by millimeter-wave radar-
中村 英夫*1 Hideo NAKAMURA 後呂 考亮*1 Kosuke USHIRO 1. はじめに ヒューマンエラーに起因した交通事故の低減, 移動手段としての利便性向上,周辺車両との協調 制御による渋滞緩和などの大きな期待を受け,国 内外の自動車メーカのみならず,様々なプレーヤ が自動運転の実用化に向けた研究開発を進めてい る.自動運転は,周辺監視の役割を含む運転権限 の 所 在 に よ っ て レ ベ ル が 定 義 さ れ て い る . NHTSA ( National Highway Traffic Safety Administration )とSAE ( Society of Automotive Engineers ) のレベル定義1),2)をTable 1に示す.
レベル1,2では,運転権限をドライバが有してお り , 高 速 道 路 で の 定 速 走 行 ・ 車 間 距 離 制 御 (Adaptive Cruise Control),車線逸脱防止シス テム(Lane Keep Assist System),それら組合せ など既に個社での製品化が進んでいる.一方,将 来的に想定される自動運転(レベル3以上)は, 少なくとも平常時(故障や性能限界などの緊急事 象が生じていない状態)は運転権限と周辺監視の 役割をシステムが有しており,大きな技術革新と 社会ルール整備(法規や保険など)が必要となる. 自動運転には,自車位置を推定する機能が必須 であり,例えば,白線識別により自車と白線標示 の相対位置を把握して白線追従制御などを行う. 特に,レベル3以上の自動運転システムでは,夜 間,日照影響,雨,雪,霧など自然環境に対する 高いロバスト性を有することが基本性能とともに 重要であり,原理的に全天候性に優れるミリ波レ ーダの白線識別への活用が期待される.一方,現 在実用化されているレベル1,2の自動運転システ ム(運転支援レベル)では,白線識別の主流はビ ジョンセンサ(以下,カメラ)である.しかし, ダイナミクスレンジの狭さに起因して,明暗差が 大きい場合(西日や照返しなど)や,照度が急変 する場合(トンネル出入口など)の識別性能に難 があり課題である.これら課題への性能改善(ダ イナミクスレンジ拡大)が近年民間にて行われて おり,その実力評価と課題把握は,今後の自動運 転研究開発においても必要である. Table 1 自動運転レベル定義 (2016/9 NHTSAはSAE定義への移行を表明) NHTSA レベル レベルSAE SAE名称 操舵/加速 /減速の 実行主体 走行環境 監視 バックアップ 主体 (緊急時) システム 能力 0 0 Automated Non-非自動化 ドライバ ドライバ ドライバ 制約あり 1 1 Assisted支援 ドライバ+ システム (加減速or 操舵) ドライバ ドライバ 制約あり 2 2 AutomationPartial 一部自動化 システム (加減速+ 操舵) ドライバ ドライバ 制約あり 3 3 AutomationConditional 条件付自動化 システム (加減速+ 操舵) システム ドライバ 制約あり 4 4 AutomationHigh 高度自動化 システム (加減速+ 操舵) システム システム 制約あり 5 AutomationFull 完全自動化 システム (加減速+ 操舵) システム システム 制約なし (ドライバ 必要なし) 以上の背景より,ミリ波レーダを活用した全天 候型白線識別技術の開発や,ハイダイナミクスレ ンジカメラ(以下,HDRカメラ)の性能評価など を,内閣府が統括するSIP(戦略的イノベーショ ン創造プログラム)における経済産業省からの委 託事業(全天候型白線識別技術の開発及び実証) として産官学が連携して実施した.一般財団法人 日本自動車研究所(JARI)は,中立公平な立場を 生かし,産官学連携の中核として研究事業を推進 した.平成26年度事業成果を紹介した第一報3)を 引き継いで,平成27年度事業成果4),5)を紹介する.
JARI Research Journal 20170201 【研究活動紹介】
2. 研究開発方針 2. 1 全天候型白線識別技術 Table 2に示すようにカメラやLIDARに比べて, ミリ波レーダは自然環境に対してロバスト性が高 い.ミリ波は,カメラやLIDARが利用する可視光 や近赤外線に比べて波長が長いため,霧や雨や雪 など水滴が分散する空中での減衰が比較的小さい ことに起因する.ミリ波レーダを用いて白線検知 ができれば,自然環境にロバストな自車位置推定 が実現できる. Table 2 各種センサの特徴比較 ミリ波レーダ LIDAR カメラ 波長 1~10mm 830~905nm 780nm400~ 基本性能 最大検知距離 ◎ ○ ○ 距離精度・分解能 △ ◎ ○(複眼)×(単眼) 方位精度・分解能 △ ○ ◎ 色の識別 × △(白黒) ○ 耐自然 環境性 雨 ○ △ △ 霧 ○ △ × 雪 ○ × × 西日・薄暮 ◎ △ × 夜間 ◎ ◎ △ 照度変化 ○ ○ × 視認性を向上させる目的でリブ式高輝度白線 (Fig. 1)と呼ばれる凹凸を有する白線が高速道 路などで普及している.Fig. 2のようにミリ波は 直進性が高いため,平らな白線では反射信号がレ ーダに再帰しないが,リブが存在するとリブ側面 でミリ波信号が反射して白線を検知可能となる. Fig. 1 リブ式高輝度白線 白線 高輝度白線 入射波 反射波 入射波 反射波 Fig. 2 各白線の信号反射 (左:フラットな白線,右:リブ式高輝度白線) 高精度ミリ波レーダ(79 GHz帯UWBミリ波レ ーダ+アクティブフェイズドアレイなど)は,距 離分解能,方位角分解能が高く,反射物体の形状 認識が可能である.Fig. 3に示すように,車両前 端部に高精度ミリ波レーダ方式のセンサを搭載し, 車両斜め前方のリブ式高輝度白線を検知,斜め前 方の白線までの距離Lと車両進行方向に対する方 位角θより,車両から白線までの距離Xを検知す る使い方を想定する. X = L×sin(θ) (1) 白線 縁石、ガードレール等 Fig. 3 白線識別による自車位置検知 2. 2 ハイダイナミクスレンジカメラの性能評価 最新HDRカメラの白線識別における自然環境 ロバスト性を見極めることを目的とする.従来カ メラが苦手とする環境でも,HDR機能により改善 が期待できる夜間降雨時や西日などでHDRカメ ラを評価した.国内メーカのご協力を頂き,最新 HDR機能付きのカメラ評価キットを借用評価し た.自動運転システム研究開発の一助とするため に,実力と課題の把握に努めた. 3. 主な研究内容 3. 1 ミリ波レーダの反射特性評価 1) リブ識別性能評価(代替リブ) アスファルト路面に等間隔に並べたリブにミリ 波レーダ信号を照射してリブの反射強度を評価し た.リブは実物と形状が異なる代替品であり,奥 行き20 mm,幅200 mm,高さ10 mmである.実 験環境をFig. 4に示す.リブの有無で反射強度を 測定して比較した.3.0 m先のリブへ向けて信号 を照射したが,これはFig. 5のように,車線幅が 3.5 m,車幅が1.6 mの環境において,車両が車線 内にある時にリブへの入射角が0~40 °となる 距離である.変調方式はFMCW,基本周波数は79 GHz,帯域幅は2 GHz,変調周期は5 msとした. リブ反射の利得を向上させるため,複数回取得し
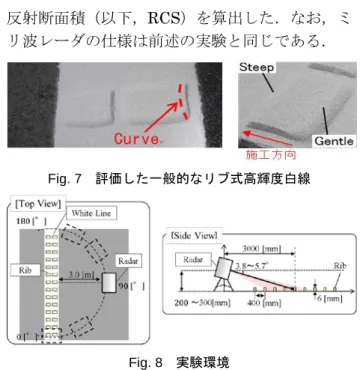
たデータを平均化する積分処理を実施した.評価 結果をFig. 6に示す.距離3.0 mに存在するリブと 路面クラッタ(ノイズ要因となる不要な反射波), の反射強度の差分が約20 dBとなりリブ反射を検 出していることが確認できた. リブ 300 [mm] 250 [mm] 10 [mm] 4.8° レーダ 3000 [mm] Fig. 4 実験環境 1.6 [m] 40 [°] 3.5 [m] 3.0 [m] 1.6 [m] 0 [°] 3.5 [m] Fig. 5 リブ式高輝度白線識別のユースケース リブの反射 反射強度 [d B] 距離 [m] リブ有り リブ無し Fig. 6 リブと路面クラッタの反射強度 2) 入射角依存性評価(実物リブ) 現在,日本の一部の高速道路や幹線道路におい て採用実績のあるリブ式高輝度白線を対象に評価 した.Fig. 7 に示すように,奥行き 50 mm,幅 80 mm,高さ 6 mm のリブが 2 個並んでいる.本 稿ではこのように二つの凸から成るリブを Twin Rib(実物)と呼ぶ.前項で評価した Single Rib (代替品)と比べて奥行きが長く高さも低い.Fig. 8 に実験環境図を示す.高輝度白線の周りを角度 0~180 °の範囲で 5 °づつ移動させ,レーダか ら3.0 m 先に存在するリブの反射強度を測定した. 10 dBsm のコーナーリフレクタの反射を基準と して,リブの反射を比較することでリブのレーダ 反射断面積(以下,RCS)を算出した.なお,ミ リ波レーダの仕様は前述の実験と同じである. Fig. 7 評価した一般的なリブ式高輝度白線 Fig. 8 実験環境
Fig. 9 に Twin Rib の反射特性を示す.横軸は Fig. 8 左図に示す角度,縦軸は RCS を示す.レー ダの設置高を3 仕様として各計測値をプロットし た.RCS のパターンが非対称であることが確認で きる.これはFig. 7 に示すように,高輝度白線施 工機の施工方向によりリブの形状が異なるためで ある.施工機は流動性材料を流し出す開口部をシ ャッタで調節することでリブ式高輝度白線をアス ファルト路面上に敷設する.また0~40 °程度ま ではRCS が高い事も分かる.これは Twin Rib の 奥行きが50 mm であり,角度が変化した場合で も照射面積が急激に低下せず,反射波が返ったた めと考えられる.さらにTwin Rib の側面は僅か に湾曲しているので,この湾曲部で信号が反射し て斜め方向からの信号が強く返ったと考えられる. 以上より,Twin Rib は広い入射角でミリ波信号を 反射することができるので白線検知に有用である. Fig. 9 高輝度白線 RCS の入射角依存性
3) 積雪減衰特性評価(代替リブ) 積雪量を変化させた場合のリブの反射強度を取 得し,シミュレーション予測結果と比較を行うこ とで,ミリ波レーダにおける積雪減衰量を明らか にした.但し,通常の材質のリブでは積雪による 減衰により信号が再帰しない恐れがあるため,金 属製の代替リブ(四角錐台)を用いて積雪減衰量 を測定した.実験環境をFig. 10に示す.ミリ波レ ーダの仕様は,前述の実験と同じである. Fig. 11に評価結果を示す.実線は実環境におけ る評価結果を表し,破線は雪の密度毎のシミュレ ーション結果を表す.横軸は積雪量,縦軸は減衰 量を表す.積雪量が増加するにつれて減衰量が増 加している.実環境における評価結果はシミュレ ーション結果と異なり,線形増加とはならなかっ た.これは,金属リブ上に人工的に積雪させた際, 雪が固まり積雪の密度が不均一に分布したためと 考えられる.そのため,積雪3 cmまでは雪の密度 が0.76 g/cm3程度となり,積雪3~10 cmでは雪の 密度が0.08 g/cm3程度となったと考えられる.一 般的に新雪の表層の雪の密度は0.1 g/cm3程度で ある.そのため,雪の降り始めの数 cmの積雪で あれば,ミリ波帯の電波の減衰は小さく,悪天候 時にも白線検知が可能であると考えられる. [上面図] 金属リブ 9.6° 6 [mm] レーダ 3000 [mm] [側面図] 金属リブ 積雪 レーダ 積雪 500 [mm] Fig. 10 実験環境 -50 -45 -40 -35 -30 -25 -20 -15 -10-5 0 0 1 2 3 4 5 6 7 8 9 10 減衰量 [d B] 積雪量 [cm] 実測 シミュレーション(0.08 [g/cm3]) シミュレーション(0.43 [g/cm3]) シミュレーション(0.76 [g/cm3]) Fig. 11 積雪減衰量評価 (実験値とSim予測値の比較) 4) 積雪反射特性評価(実物リブ) 実際に使用される施工機を用いて,5列のTwin Rib白線を敷設した排水ブロック(30 cm×30 cm×5 cm,Fig. 12)を電波暗室内に10個×10個 ほど敷詰め,ミリ波レーダを照射して積雪時の受 信特性を計測した.周波数帯域は77.5~80.5 GHz, 帯域幅は3 GHzに設定した.雪の密度は0.3~0.4 g/cm3と比較的水分量が多い雪質であった. 測定結果をFig. 13に示す.積雪の有無で比較す ると,1番目,4番目,5番目のリブからの反射波 ピークの位置は,積雪の有無に関わらず殆ど差異 がなくリブを正確に捉えている.しかし,2番目, 3番目のリブからの反射波レベルは積雪の有無に 関わらず低い.これはアンテナとリブの幾何学的 配置の影響と考えられる.1番目のリブからの反 射波ピークの位置が少しずれているのは積雪表面 からのクラッタ,つまり雪表面のラフネスの影響 と思われる. 車両走行中は,等間隔に配置されたリブからの 反射波を周期的に受信できる.従って,時間空間 的な信号処理により,数cm程度の積雪,降雪直後 の雪質ならば,リブ式高輝度白線の相対位置を十 分把握できると思われる. 2個リブ白線(5列) 排水性ブロック ミリ波レーダ 装置 現在、高速道に敷設される リブと同じ形状(但し継ぎ目あり) 高速道と同じ排水性アスファルト道路 Fig. 12 実験環境(実物リブ) 距離[m] 受信電力[ dB ] 雪なし 雪3cm リブ Fig. 13 積雪時の79GHz帯ミリ波受信信号特性
5) 積雪反射特性の時間推移評価(代替リブ) 降雪時間と共に下部は圧雪され雪質も変わって いく.白線のある高速道路上で自動走行中に雪が積 もり始め,システムが性能限界を迎えるシナリオを 想定すると,白線検知に用いるミリ波レーダの性能 限界はより高い方が望ましい.屋外で降雪機を使っ て雪を降らせ,受信信号が降雪時間と共にどのよう に推移していくのか代替リブ(Single Rib)で評価 した.同データの3D表示をFig. 14,2D表示をFig. 15に示す.200秒後の積雪の深さは約3cmであった. Fig. 14 において,降り始めは降雪の密度が低い (水分量が少ない)ためリブからの反射波の変化 が少ないが,リブが見えなくなり始めた約 120 秒 後からリブからの反射波の減衰が大きくなってい ることが分かる.Fig. 15 において,リブの位置で の信号は 90 秒後以降大きく減衰している.一方, 90 秒以降に見られる信号の位置はリブの位置と 一致しておらず,積雪表面からのクラッタ,つま り雪表面のラフネス(凹凸)の影響と思われる. したがって,積雪後に時間が経過した環境下での 白線検知には課題も残されている. Fig. 14 降雪時間に対する反射信号の推移 (3D表示) Fig. 15 降雪時間に対する反射信号の推移 (2D表示) 3. 2 ハイダイナミクスレンジカメラの性能評価 ダイナミクスレンジとは,カメラの撮像素子に 入る光のうち,最も明るい部分と最も暗い部分の 差のことである.この明度差を広くする加工技術 がハイダイナミクスレンジ合成(HDR)と呼ばれ るものである.一般に明るい部分の多い写真では, 白飛びという現象が発生し,暗い部分が多い写真 では,黒つぶれという現象が起きる.このような 現象を低減するために,露光の違う映像を合成す ることでハイダイナミクスレンジ合成ができる. 国内メーカのご協力により借用した最新HDR 機能付きのカメラ評価キット(HD及びFull HD の二種)を使った評価結果を以下に紹介する.な お,今回は厳密な調整をしない状態で撮像検証し た. まず HDR 機能の画像差を Fig. 16 に示す.左 がHDR 無しで,右が HDR 有りでの画像である. HDR 機能がある場合には,街灯の影響で明度差 が大きなシーンにおいても,白飛びが抑えられ, 道路の白線を明瞭にとらえることができている. Fig. 16 HDR 機能の有無による画像差 (左:HDR 機能無、右:HDR 機能有) 西日やトンネルの出口などでは,同じように白 飛びや黒つぶれの現象が抑制されることで,路面 の白線を従来よりも遠くの距離まで鮮明に識別す ることができる画像が他にも得られている.借用 カメラ評価キットでは,10万ルクスの光を受けた 状態でも撮像が可能とのことで,実際,2万ルク ス以上の西日でも,白飛びが抑えられ,全体に明 るさが均一的になり,路面も遠方まで識別可能な 映像が撮影できた.このように,従来のカメラに HDR機能が付くことにより,対応可能な状況や環 境状態が拡大する. しかし,HDR機能や自動露光機能も完全に万能 ではなく,夜間の降雨時など,路面に若干の水幕 ができるような場面では,白線部分の明度差が減 少してしまうため,白線認識は困難となる状況が
あった.これは肉眼でも認識しにくい状況であり, 画像処理で白線識別を強化することでの対応が必 要な場面といえる.同じ夜間の降雨時で対向車や 看板の照明が路面に反射する場合,中央線等の認 識が困難となる状況もあった.これはFig. 17に示 すような状況である.また,Fig. 18に示すように フロントガラスを通した西日の拡散光と影では HDR機能でも限界が見られた. Fig. 17 夜間小雨時の路面反射 Fig. 18 フロントガラスを通した西日の拡散光と影 Table 3 に,白線識別における従来カメラと HDR 機能カメラの性能比較を示す.かなり適合環 境は広がっているが,△で示すような場合もある. Table 3 各種センサの特徴比較 自然環境 従来カメラ(中距離<40m) HDR機能カメラ(中距離<40m) 通常環境 ○ ○ △:降雨量によって悪化 △:降雨量によって悪化 (路面水幕下は困難) (路面水幕下は困難) 霧 △:視程距離により悪化 △:視程距離により悪化 雪 × × 夜間 △:照度により悪化 ○:照明距離に依存 西日 ×:ダイナミックレンジ不足 ○:拡散光は△ 照度変化 (トンネル出口等) 雨 ×:ダイナミックレンジ不足 ○:高速時は△ 4. まとめ 4. 1 ミリ波レーダを用いたリブ式白線識別技術 等間隔に敷設された凹凸構造を有するリブ式高 輝度白線は,高速道路などの一部に既に敷設され ている.高精度ミリ波レーダ(79 GHz帯UWB) を用いて,リブ式高輝度白線との相対位置を精度 良く把握できることを原理確認した.さらに,雪 の降り始めを想定した数cm程度の積雪であれば, 良天候下と同様にリブ式高輝度白線の識別が可能 であることを検証した.悪天候下でもロバストな 自車位置推定が実現可能と思われる. 4. 2 ハイダイナミクスレンジカメラ性能評価 HDR機能を搭載したカメラを用いることで,従 来のカメラでは白線識別や遠方までの識別が困難 であった環境条件において,白飛びや黒つぶれを 抑制することができ,対応環境を拡大することが できることが分かった.しかし,対応できる環境 条件は広がるものの,撮像物に水幕ができ反射現 象が起きるような場合は,ダイナミクスレンジの 拡大で対応できる問題ではないため,カメラでの 識別が困難な状況は残る. 参考文献
1) National Highway Traffic Safety Administration (NHTSA, US) : Preliminary Statement of Policy Concerning Automated Vehicles (2013)
2) Society of Automotive Engineers (SAE) International : Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems,J3016 (2014)
3) JARI Resarch Journal,【研究活動紹介】全天候型白線 識別技術の開発及び実証(2015,10)
4) 平成27年度戦略的イノベーション創造プログラム(自 動走行システム):全天候型白線識別技術の開発及び実 証事業報告書,一般財団法人日本自動車研究所 (2016) 5) Kotaro Ishimoto, Masayuki Kishida, Yuuichi
Sugiyama, Hideo Nakamura : Verification of the detection of raised profile line markings by millimeter-wave radar, ITS-WC (2016)