GIS−理論と応用
Theory and Applications of GIS, 2012, Vol. 20, No.2, pp.23-33
【原著論文】
レーザ計測による地理空間データを用いたディジタルシティの構築
天野貴文*・吉川 眞**Generating Digital City by Using Geo-spatial Data from Laser Measurements
Takafumi AMANO* and Shin YOSHIKAWA**
Abstract: In the field of urban design and landscape design, efficient and probable methods have been researched and developed to generate a digital city which is an urban model made by using three-dimensional computer graphics. This study tried to automatically generate three-dimensional building models with a roof shape and a facade shape in order to improve probability of landscape simulation in surroundings and an efficient urban modeling on computer graphics. The authors used DSM (Digital Surface Model) data, which is acquired by airborne LIDAR (Light Detection and Ranging), and MMS data, which is acquired by MMS (Mobile Mapping System) also known as mo-bile LIDAR. A building's roof shape was reproduced and interpreted by the DSM data, and a facade shape was reproduced by the MMS data. Finally, the authors proposed a method of performing these automatically.
Keywords: モービルマッピングシステム(mobile mapping system), ディジタルシティ(digital city), 屋根(roof), ファサード(facade), 蓋然性(probability)
1.はじめに 都市デザイン・景観デザインの分野では,これま で効率的で蓋然性の高いディジタルシティの構築方 法について研究開発されてきた.ディジタルシティ とは現実の都市をコンピュータを用いて3次元モデ ル化した都市情報データベース(吉川,2007;吉川, 2011)であり,バーチャルシティとも呼ばれる.た だし,バーチャルシティは現実に存在しない都市空 間も含む概念である. 現在,コンピュータを用いた景観シミュレーショ ンの実施時には,その基礎データとしてディジタル シティが用いられることが一般的になっている.従 来は都市・地域情報を視覚的に表現するツールとし て,計画支援はGIS,設計支援はCAD/CG(Computer Aided Design/Computer Graphics)と使い分け,個別 の領域で都市情報のデータベース構築がなされて いた(吉川,1998)が,ディジタルシティはGISと CAD/CG双方の特性をよく認識した都市情報データ ベースとして発展しつつある. このディジタルシティの構築時において,景観把 握モデル(篠原,1982)でいう対象場に存在する対 象のうち主対象や副対象として表されるような,そ のシーンでもっとも重要な景観要素が再現対象の場 合,3次元CADシステムやCGモデラを用いて,そ の細部までモデル化されるのが一般的である.俗に いう図面から起こす方法がとられる. 一方,対象場に背景として存在する建物など,い わゆる周辺環境モデルは地物それぞれを詳細に再現 する必要性はないものの,雰囲気の再現は景観シ ミュレーションの完成度に影響を及ぼすものであ る.つまり,蓋然性高く表現する,言い換えると 「それらしく見える」ことが求められている(Amano and Yoshikawa, 2011).
* 正会員 大阪工業大学大学院工学研究科(Osaka Institute of Technology)/アマノ技研 ** 正会員 大阪工業大学工学部(Osaka Institute of Technology)
〒 535-8585 大阪府大阪市旭区大宮 5-16-1 Tel:06-6954-4201 E-mail:yoshikawa@civil.oit.ac.jp
2.研究の目的
一般に周辺環境モデルに用いられる建物の表現 には,基盤地図情報や,地形測量の成果である DM(Digital Mapping)データに収録されている建 築物の外周線に対して,建物階数やLIDAR(Light Detection and Ranging)データから得た高さ情報を付 与して上空に押し出す多角柱モデルが用いられる. 景観検討時に明確な主対象がある景観シミュレー ションの場合,主対象以外の建物は多角柱モデルで かつワイヤフレーム表示にすることなどで,主対象 をより際立たせることができる.一方,主対象が地 域などの面的広がりを有する建物群などで構成され る場合,予算やモデル構築の手間を理由に建物を多 角柱モデルで再現すると,たとえば伝統的建造物群 保存地区での景観シミュレーションを想定した場合 では,同地区内に鉄筋コンクリート造の陸屋根が立 ち並ぶかのような錯覚を見る者に与えてしまい,景 観シミュレーションの蓋然性(確からしさ)が疑わ れることになる. 多角柱モデルは生成が簡単であるものの,屋根 形状のほか,ベランダやバルコニーといったファ サード(建物前面)の形状が表現できない.このファ サードの形状を再現するには,建物側面の情報を有 する地理空間データが必要となる.そこで,本研 究では先述のLIDARデータと移動体レーザスキャ ナのモービルマッピングシステム(Mobile Mapping System:MMS)で取得された点群データ(MMSデー タ)を用い屋根形状とファサードを考慮した3次元 建物モデルの構築を目指すこととした.なお,ディ ジタルシティとは地形と地物のみならず,都市が有 する情報のすべてを包含する概念であるが,本研究 はとくに見えの大きさ(対象の見込角)が大きい地 形と建物に着目し,まずはその再現を目指すこと にした.なお,目指すモデルはCityGML(Gröger et al., 2008)が定義するLOD2のモデルに相当する. MMSデータを用いた建物モデルの構築に関する 既往研究には,本研究で用いたものとは異なるステ レオ写真測量が可能なMMSを用い,被観測点の平 面成分をポリゴン化して建築物の多角柱モデルを作 成する研究がある(辻ほか,2005).MMSデータの 利用法に関する研究事例には,たとえばトンネル形 状の取得(石川ほか,2008),架空線・電柱位置の 取得(小野ほか,2008)などがあり,点群データを そのまま利用する研究が主流となっている. 3.MMS と MMS データ 3.1.MMSとMMSデータの概要 MMSとは図1に示すように車両天板上にGPSア ンテナ,IMU(Inertial Measurement Unit:慣性計測 装置),レーザスキャナを装備したGPS移動計測装 置である.MMSは最高時速80kmで走行しながら, 1秒間に約26,000発のレーザを発射し,道路(車両 走行軌跡)に沿った形で80m先までの高密度な3次 元の点群データを取得することができる(吉田ほか, 2009).レーザは前方上方と前方下方の2機が存在 し,取得される点群データの精度はレーザスキャナ から7m離れた地点の絶対精度が0.1m以内,相対精 度が0.01m以内である.MMSデータの内容は座標 値(XYZBLH),GPS時刻,誤差およびカラー値(RGB) である. ①GPS ユニット ②IMU ③ディジタルカメラ ④3D レーザスキャナ 図 1 MMS 外観 MMSは基本的に地表部やトンネル部など,観測 距離が短い場所にある対象表面の把握に適してお り,そのデータは地図情報レベル500の要求精度を 十分満たすことから,測量実務のレベルでは道路 台帳平面図更新のための地形測量(今西,2011)や, 地下埋設物設計図の作成効率化(松村ほか,2010) などに用いられはじめている. このMMSデータ使用時の留意点を以下に記す. ①再現イメージは観測点に依存する:パース表示時
に観測点,具体的にはMMS車両軌跡上以外の視 点から再現されたイメージは,その内容の把握が 困難である. ②パース表示時に地物の遮へい効果がない:点群は 次元を持たないため,視線を遮へいしない.本来 なら陰になる背後部分も透けて見えてしまう. ③観測距離が長くなるほどデータ密度が疎になる: ポイントデータは観測距離が短い場所ほど密にな り,観測距離が長い場所ほど疎になる. ④データ量が膨大になる:データは1秒間に最大約 26,000発分となり,仮に10分間観測すると,デー タ量は約936万ポイント分と膨大である.したがっ てハンドリングが困難になる. これらの特徴から,MMSデータはイメージベー スド・レンダリング(Image-based Rendering:IBR) に必要な光線データベース(篠原ほか,2003)に類 似しており,イメージベースドな特徴を持つデー タであると言える.また,IBRのためのモデリング 方法がイメージベースド・モデリング(Image-based Modeling:IBM)であると定義した場合,従来のソ リッドモデルやサーフェイスモデルを用いたモデ リング手法はモデルベースド・モデリング(Model-based Modeling:MBM)と定義できる.都市デザイン・ 景観デザインでは,地物の自由な操作が要求される ため,このMBMを可能にすることが重要となる. 3.2.MMSが位置情報を取得できない場所 本研究で使用したMMSに搭載されている3Dレー ザスキャナで取得されるデータはレーザの向きによ りその性質が大きく異なる.前方上方レーザはおも に地物の側面や下面をとらえており,建物の場合は ファサードの形状を取得できているが,屋根などの 建物の上面部のデータは取得できない.一方,前方 下方レーザはおもに地表面をとらえており,MMS の主目的である地表面の計測・測量に対応している. 実際,MMSデータを用いて詳細な数値表層モデル (Digital Surface Model:DSM)を構築することが可 能であり,MMS車両から周囲5m程度の範囲であ れば0.2m解像度のDSMが作成でき,アスファルト 舗装に生じるわだち掘れやポットホールなどの把握 が可能である.両レーザ共通で地物の背面部分,陰 となる部分のデータ取得が困難である.したがって, データが取得できない部分の再現には,何らかの方 法で補完するか,形状を推定する必要が生じる.な お,最近のMMSには前方観測だけでなく,後方観 測が可能なもの(木元ほか,2010)や長距離観測が 可能なものも開発されている. 4.ファサード付き建物モデルの生成 4.1.試行対象地と使用地理空間データ 本研究では都市デザイン・景観デザインのために データの操作が困難なイメージベースドなデータ を,操作可能なモデルベースドなデータへ変換する ことでMBMの実現を目指し,点群データから3次 元建物モデルの生成を試みることとした.なお,先 行研究でキューブモデルによる建物モデルの構築を 試みたが,視覚的なリアリティが欠けたものとなっ たため(天野・吉川,2010a),本研究ではサーフェ イスモデルによる建物モデルの構築を試みる.次節 以降でケーススタディを通じファサード付き建物モ デルの生成手法について解説する. 試行対象地に設定した阪急電鉄宝塚線の岡町駅周 辺を図2に,ケーススタディで使用する主な地理空 間データを表1に示す. 図 2 阪急電鉄宝塚線岡町駅周辺 4.2.MMSデータの連結によるラインの作成 オリジナルのMMSデータは属性情報としてGPS 時刻情報を有する.本研究では,この時刻情報を用 いて各ポイント(以下,MMSポイントと記す)間の 関係を導き出す.具体的には,同じ時刻情報を有す
るMMSポイントをレーザ光線発射順に連結して, ラインへの変換を試みた.実データに適用した結果, MMSポイントの連結前が図3,連結後が図4のよう になった.生成したラインはGPS時刻の等値線に 該当する. 図 3 MMS ポイントの連結前 図 4 MMS ポイントの連結後 4.3.観測距離の計算と属性情報への付与 図4を見ると上空が明らかに不自然な形でふさ がっている.これは地物が存在しない場所,レー ザが反射しない場所にもMMSポイントの連結によ りリンクが生成されたためである.そこで不要な リンクの削除のため,観測距離とデータ間隔(点間 距離)の関係からしきい値を設定する.観測距離は MMSポイントが観測されたときのMMS車両位置 がわかれば求まる.しかしながら,MMSデータの GPS時刻は小数以下4桁で収録されているのに対し, MMS車両軌跡データの時刻情報は小数以下1桁で 収録されているためMMS車両の位置が定まらない. そこで,MMS車両の位置を線形補間により求める ことで観測距離を計算した. 4.4.地物面判定式の設定 連続した地物面がある場合,生成したライン上に MMSポイントが観測点(MMS車両位置)からの距 離に比例した間隔で存在する.しかし,レーザ光線 が隣の建物へと移った場合など,地物の連続が途絶 えた場合に点間距離は漸減・漸増せず,急減または 急増する.そこで,MMSデータを精査し,車両軌 跡の直角方向を観測距離と見立て,最小二乗法によ り観測距離と点間距離の回帰式を求める. 具体的にはまず試行対象地域にあるおおむね平 坦な3箇所の交差点を選定し,MMSポイントの車 両軌跡からの最短距離(x軸)とMMS車両軌跡直角 方向の点間距離(y軸)をグラフ上にプロットした. 両者の関係が正規分布にしたがうと仮定し,その 99.7%が含まれるようにμ+3σ(平均+標準偏差の3 倍)の位置で最小二乗法を用いて図5のように近似 曲線にあてはめた. この結果,次式を得ることができた. y ≤ 0.1e0.165x 式1 以下,本式のことを地物面判定式という.4.2 で作成したラインを構成するリンクについて,この 観測距離と点間距離の関係が地物面判定式を満たさ ない場合,リンクを構成するノード2点が同一の地 物面にないと考えることができる. 表1 使用した主な地理空間データ(順不同) データ名/出典 内 容 MMS データ /株式会社パスコ 2009 年 12 月計測.座標値(XYZBLH, 平面直角座標第 VI 系,日本測地系 2000),GPS 時刻(小数以下4桁,秒), 予測誤差(m),カラー情報(RGB) が収録されたCSV ファイル. MMS 車両軌跡データ /株式会社パスコ シェープファイル形式のラインデー タ.平面直角座標第VI 系(日本測地 系2000).GPS 時刻(小数以下1桁, 秒),車両傾き情報(m)などを収録. 基盤地図情報(縮尺レベル 2500)豊中市/国土地理院 2008 年調製,平面直角座標第 VI 系(日本測地系2000),建築物の外周線 の地図情報レベルは500. LIDAR データ /株式会社パスコ 2006 年から 2007 年の間に撮影,デー タ取得間隔2m(2m×2m に1点以上), 平面直角座標第 VI 系(日本測地系 2000)の DSM データ(ランダムデー タ). 基盤地図情報(数値標高モ デル)10m メッシュ(標高) /国土地理院 2008 年調製,緯度経度座標系(日本 測地系2000)の DEM(Digital Elevation Model:数値標高モデル)データ.
図 5 回帰式へのあてはめ 4.5.観測距離に対して長いリンクの削除 MMSポイントの連結により作成したラインを構 成する各リンクのうち,点間距離が観測距離に対し て長く,地物面判定式を満たさないものを除外する. このとき,観測距離はリンクを構成するノード2点 の観測距離の平均を用いて計算する.実際のデータ に対し適用した結果を図6に示す. 図 6 観測距離に対して長いリンクの削除後の状態 4.6.地物のエッジ上のMMSポイントの抽出 前節の処理により,出力されるラインは地物の表 面を追跡したものとなる.したがって平面の場合は リンク間の交角が約180度になるのに対し,建物の 角部分は45度以上90度以下の範囲をとる.このよ うなリンク間の交点は地物のエッジを構成すると考 えられる.そこで,ラインを構成する各ノードの座 標を順に取得して,連続する2本のリンクのベクト ルの内積からエッジの構成点の判定を行った. 各ラインの端部は地物面判定式を満たさないリン クを除去した際,すでに地物の端部を表す位置と なっている.そこで,交点以外に各ラインの端部も 同様に地物のエッジを構成するポイントとして抽出 する.以下,抽出したポイントをPEと記す. 4.7.ユーザによる外壁線・手すり壁線の入力 再現するモデルは図7に示すように,建築物の外 壁線を基準に多角柱モデルを生成し,ベランダなど の形状を示すサーフェイスを付与する形で生成す る.しかしながら,基盤地図情報などの地形測量成 果における建築物の外周線は「建物の屋根の外周線」 と定義されており,必ずしも外壁部分を示している わけではない.したがって,外壁線の位置と追加す る手すり壁の位置を設定する必要がある. 図 7 多角柱モデル+追加サーフェイスの例 ここでは簡便に,地物のエッジ上にあるポイント PEと建築物の外周線を目印に,ユーザにより平面図 からラインを入力させることで外壁線を設定する方 法を採用した.手すり壁線については,その端部周 辺に存在するPEを半径0.1m(絶対精度の値)のバッ ファリング内包検索を用いて改めて抽出する.以下, 再抽出したポイントをPPと記す.また,図8にPEと PPの抽出イメージを示す.なお,手すり壁は一つと は限らないため,複数本入力できるようにしている. ここでは便宜上,追加する壁面を手すり壁と記して いるが,図7右のような場合であると,同図の外壁 部を手すり壁として指定することになる. 操作画面上では,図9のようにPEと建築物の外周
線を参照しながら, GIS(ここではSIS Map Modeller を使用)のスナップ入力機能を用いてユーザがライ ンを入力する.なお,外壁線のバッファリング内包 検索の際には,得られたPEから最高高さを取得し, 対象建物の高さと仮定した. 4.8.手すり壁位置の設定 前節で取得したポイントPPは左端・右端の端部別 に集約した後に標高値で昇順ソートする.次に,整
列したデータに対し地物面判定式を適用することで, データ間隔が観測距離に対して大きくなる箇所で区 切り,図10のようにPPをグループ化する.このグルー プが同じエッジ上にあるポイントと判定される. 図 10 地物面判定式の適用によるグルーピング 左端側で設定したグループと右端側で設定したグ ループを標高の低い側から順にチェックし,グルー プ相互の包含関係を確認することで,左端と右端で 共通するグループを設定する.以下に具体例を示す. ここではグループ名をグループL1がGL1のように省 略して記載する. ①GL1とGR1の比較:まず,両グループでもっとも低 い位置にあるGL1を基準に,反対側の端部にある もっとも低い位置のグループGR1の配置を確認す る.結果,GR1はGL1に包含されることからGL1が残る. ②GL1とGR2の比較:GL1を基準にGR2を確認する.GR2 下端はGL1に含まれるものの,上端はオーバーする ため,両者を合成した上端29.6m,下端26.5mの新 しいグループG1を作成する.この時点でほかにG1 の上端を含むグループがないことからG1は確定. ③GL2とGR3の比較:G1の上端にもっとも近い下端 を持つグループを基準に,これまでの比較方法を 繰り返す.本例ではGR3がGL2に包含されるため, GL2が残り,そのままGL2がG2となる. ④G3の確定:③の結果,GL3は比較対象のないグルー プとなるため,そのままG3として確定する. この結果から図10の例では,グループが3つ作成 されることになる.なお,設定したグループは,そ の最高値が手すり壁の上端,最低値が手すり壁の下 端と対応する. 4.9.サーフェイスの生成 ユーザが設定した外壁線から多角柱モデルを生成 し,前項で設定した手すり壁位置にサーフェイスを 多角柱モデルの方向に押し出す形で生成すること で,3次元建物モデルが完成する.実際の出力が図 11である. 図 11 建物モデルの生成結果 ここで,MMSは軒より上側のデータが取得でき ないことから,建物の高さが取得しづらい.そこ で,LIDARデータによる建物高さの補正を試みた. 具体的には,建築物の外周線に含まれるLIDARデー タから得た標高値の最頻値を求め,手すり壁のグ ループのうち,もっとも高い場所に位置するグルー プの上端高さをその最頻値に設定する.あわせて, 図 8 PEと PPの抽出 図 9 外壁線・手すり壁線の入力イメージ
ユーザが設定した外壁線から立ち上げる多角柱モデ ルの部分についても,同様の高さを設定する.図 12(a)が高さを補正した結果であり,同図(b)は現 地で撮影した写真である.図左側の建物のベランダ 部分がうまく再現できている. (a)高さ補正後の建物モデル (b)現地写真 図 12 建物モデルの高さ補正
以上に示した一連の手続きをSIS Map Modeller上 で実施できるようGISLinkを用いてカスタマイズす ることにより,半自動的にファサード付き建物モデ ルを生成するシステムの開発を行った.以後,この 手続きをファサード生成フローという. 5.屋根およびファサード付き建物モデルの構築 5.1.屋根形状の設定方法と自動処理 ここまでMMSデータを用いたサーフェイスモデ ルによるファサード形状付き建物モデルの生成を 行ったが,傾斜屋根は再現できていない.そこで本 章では,著者らの既往研究である屋根形状の簡易判 読手法(天野・吉川,2010b)を組み合わせ,屋根形 状およびファサード形状のどちらも考慮した3次元 建物モデルの生成を試みることとする.図13は屋 根形状およびファサード付き建物モデルの生成フ ロー図である.以下,この手続きを統合フローとい う.次節よりケーススタディと並行して統合フロー の具体的処理について説明を記す.試行対象地,使 用した地理空間データは前章と同じである. 図 13 統合フロー図 5.2.ファサード部の処理 統合フローでは外壁線,手すり壁線に続いて新た に軒線(軒先の位置)が必要となる.ファサード生 成フローでは外壁線と手すり壁線の入力はユーザが 自身の経験に基づいて行ったが,軒線の入力も同様 に行う.この結果,一つの建物につきユーザは少な くとも3本のラインを入力しなければならない. 軒線の入力により,軒線周囲のMMSデータから 最大高さ,ならびに鼻隠高さ(軒先先端部の高さ) を求め,その高さを基準に上部はDSMデータに対 して適用した簡易判読結果から屋根を生成する.一 方,下部はMMSデータを使用し,ファサード生成 フローの方法でファサード形状を再現する.ファ サード部にあるひさしについては,屋根の傾斜角度 と同じ角度を付与する.手すり壁とひさしは建築基 準法施行令第126条を参考に,高さ1.1mを基準に区 分している. 5.3.屋根形状の簡易判読手法 本手法はDSMデータを用いて建物の屋根形状を 判読する手法であり,判読対象とする建物は建築物 の外周線が4辺からなる矩形の建物となっている. 屋根形状は図14に示すように寄棟屋根,方形屋根, 切妻屋根,陸屋根の4種類である.以下,屋根形状 別の判定方法を記す.本手法はHaalaらの方法(Haala
and Brenner,1998)を応用したもので,軒線抽出の 代わりに基盤地図情報を用い,仮想屋根面を上記4 種類のみに制限している.なお,判読は屋根構成面 の多い屋根形状の順に行う. 寄棟 方形 切妻 陸 図 14 判読対象となる屋根形状 (1)寄棟・方形屋根の判定方法 屋根形状の判定では,事前にDSMデータと同じ解 像度の方位角および傾斜度グリッドを作成しておく. 最初の傾斜屋根判定では,まず建築物の外周線の 位置に寄棟屋根を仮に設定して,4枚の仮想屋根面を 設置する.各屋根面に含まれる方位角グリッドセル を取得後,それぞれ軒側に対し直角方向に傾斜する グリッドセルを集計し,4面すべてに関して次式が成 立することをもって寄棟屋根であると判定する. iGva/iGv ≥ TS 式2 ここに,iGva:i番目の仮想屋根面に含まれる軒 側に傾斜するグリッドセル数,iGv:i番目(iは1∼4) の仮想屋根面に含まれるグリッドセル数,TS:しき い値(=0.5)である.屋根勾配は集計したグリッド セルの最頻値を求め,各仮想屋根面の最頻値の平均 値とする.なお,寄棟屋根に該当する建物のうち, 建築物の外周線が正方形のものは方形屋根とした. (2)切妻屋根の判定方法 寄棟・方形屋根に該当しない建物は切妻屋根に仮 設定する.建築物の外周線上で長辺または短辺方向 に棟線を配置し,外形線と棟線から2枚の仮想屋根 面を生成する.以降,(1)と同様の判定を行い,式 2を満たす場合は切妻屋根と確定する. (3)陸屋根の判定方法 ここまでで傾斜屋根に分類されなかった建物は, 最後に次式を用いて陸屋根の判定を実施する. Gg/G ≥Tf 式3 ここに,Gg:屋根面に含まれる傾斜角が1寸勾配 未満のグリッドセル数,G:屋根面に含まれるグリッ ドセル数,Tf:しきい値(=0.5),である. 本研究ではLIDARデータから構築した解像度1m のDSMデータを用い,屋根種別,建物高さ,棟線 位置,屋根傾斜角度を取得した. 5.4.サーフェイスの生成 ファサードの生成については前章に示した方法と 同様である.一方で屋根部については,寄棟・切妻 屋根の場合は屋根ポリゴンを軒線の位置から最高高 さにある棟線に向けて生成する.方形屋根の場合は 棟線ではなく,重心の鉛直上にある最高高さの位置 に向けて屋根ポリゴンを生成する.陸屋根の場合は 屋根面を追加せず,建物モデルの上面をそのまま用 いる.なお,建物側面および背後面の軒の位置は, 入力した軒線とその軒線に対し建築物の外周線の重 心上に設定したファサードの平行線を軸に対称とな る位置を辺とする矩形の範囲が軒線であると自動的 に判定される.手すり壁のうち鼻隠と判定された部 分について,屋根種別が傾斜屋根の場合は同じ傾斜 を付けて建築物のファサード方向に押し出して生成 する.なお,陸屋根の場合は傾斜を付与しない.試 行生成したモデルを図15に示す. (a)ファサードと屋根を再現したモデル (b)現地写真 図 15 ファサードと屋根部分の再現例
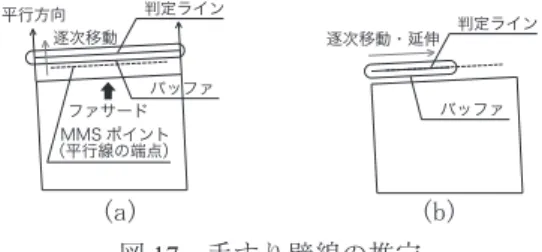
6.外壁線・手すり壁線・軒線の自動抽出 ここまでで建物の屋根形状とファサードの形状を 半自動的に再現することができた.しかしながら, ユーザのライン入力位置により,図11と図12(a) の右奥の建物のように,ファサードが変わる問題が 新たに生じた.そこでユーザが入力する外壁線,手 すり壁線および軒線を自動抽出する方法について, GISの空間解析機能を活用することで実現する. 6.1.逐次バッファリング内包検索 提案手法は2次元平面上で仮定したライン(判定 ライン)のバッファ内に含まれるMMSデータの数 がもっとも多く含まれる位置を壁面の位置と判定す るものである.判定ラインを逐次移動させつつ,繰 り返しバッファリング内包検索を行うことで位置を 推定する.すなわち,本手法は3次元空間で局所領 域を設定した上で行う回帰分析といえよう. 6.2.外壁線の推定 まずファサード側の外壁の範囲を求め,その後に 全体の外壁線の推定を試みる.図16は推定の流れ を示しており,初期状態が(a)である. ①ファサード方向の取得:建築物の外周線の重心と MMS車両軌跡間の最短距離をとる重心軌跡間ラ インを(b)のように作成し,車両軌跡との交点を Aとする.この交点A側がファサード方向となる. ②ファサードの方位角の取得:バッファリング内包 検索で建物重心にもっとも近い MMSポイントを 取得し,そこから重心軌跡間ラインへ垂線を下ろ して交点Bを求め,(c)に示す判定ラインを設置 する.次に同図に示す交点Bから交点Aまでの間 であらかじめ設定した間隔および回転角度ずつ判 定ラインを移動させ,(d)のように逐次バッファ リング内包検索により方位角を取得する.本研究 ではバッファ距離と移動間隔を0.1m,回転角度 を0.01度と設定した. ③ファサードの設定:②で確定した回転角方向で, (e)のように判定ライン両端を十分に長く延伸す る.建築物の外周線との交点がCおよびDとなる. ④ファサード長さと側壁面の設定:③で設定した ファサードを基準に,交点CとDの近傍にあるファ サードの直角方向に存在する面を(f)(g)のよう に設定する.側壁の位置が設定できない場合は建 築物の外周線をそのまま使用する.外壁線の自動 設定後の状況が(h)である. (a) (b) (c) (d) (e) (f) (g) (h) 図 16 外壁線の推定 6.3.手すり壁線・軒線の推定 推定方向はファサードの外壁線と同じ方向とし, 逐次バッファリング内包検索により手すり壁線,軒 線の位置を推定する.いずれも図17(a)のように 平行方向に推定した後に同図(b)のように幅を推定 する.ここで,軒線の推定時のみ,幅をファサード の幅より大きく取り,高さの検索範囲も地表付近を 無視するよう制限をかけている.外壁線,手すり壁 線,軒線が決定できれば,残りのサーフェイス生成 は統合フローの方法により可能となる. 7.おわりに 本研究で提案した手法により,建物の屋根形状な らびにファサードの形状を考慮した建物モデルの自
動構築が可能となった.これにより誰が操作しても 同じ建物モデルが生成でき,迅速かつ効率的なディ ジタルシティの構築が実現できる可能性を示した. 提案した外壁線等の自動抽出手法は万能でないた め,建物モデルに対する個別の修正が必要となる場 合がある.今後の課題として,モデル構築の効率性 を考えると,インタラクティブな修正方法が必要と なる.また,窓のような開口部の処理や,矩形以外 の建物形状への対応,主対象モデルを対象にした精 度検証も今後の課題としてあげられる. ディジタルシティを構築する上で,現実感を表現 するには建物以外の地物の表現,とくに人間の視点 に近い建物宅盤付近の地形・地物,建物付属物の再 現が重要であることがわかっている.たとえば,敷 地内の立ち木,プランタ,塀,門,カーポートのよ うな道路付帯施設や建物付属物などがリアリティ向 上の面では重要な要素となる.今後これらの地物の 再現手法についても検討を加えていきたい. 謝辞 本稿をまとめるにあたり,株式会社パスコ関西事 業部の平尾公孝氏,土田直之氏,安井嘉文氏には, MMSデータおよびLIDARデータを貸与して頂くと ともに,技術情報などをご提供頂いた.ここに記し, 感謝の意を表す. 参考文献 天野貴文・吉川眞(2010a)MMS データを用いた 3 次元都市モデルの構築.「地理情報システム学会 講演論文集」,19,2A-3(CD-ROM). 天野貴文・吉川眞(2010b)建物屋根形状の簡易判 読の試行と評価.「情報・システム・利用・技術 シンポジウム論文集」,33,49-54. 石川貴一朗・村石隆介・瀧口純一・天野嘉春・橋詰 匠・藤島崇(2008)モービルマッピングシステム を用いたトンネル断面形状管理に関する研究.「日 本機械学会ロボティクス ・ メカトロニクス講演会 講演概要集」,2008,1A1-G22(DVD-ROM). 今 西 暁 久(2011)MMS(Mobile Mapping System)
による道路空間 3 次元計測と公共測量への適用. 「測量」,61(3),12-15. 小野修平・石川貴一朗・瀧口純一・島嘉宏・天野嘉 春・橋詰匠(2008)モービルマッピングシステム を用いた架空線・電柱位置管理に関する研究.「日 本機械学会ロボティクス ・ メカトロニクス講演会 講演概要集」,2008,1A1-G21(DVD-ROM). 木元勝一・西川啓一・瀧口純一・吉田光伸(2010)モー ビルマッピングシステムと各種応用例.「三菱電 機技報」, 84(8),34-37. 篠原修(1982)『新体系土木工学 59 土木景観計画』, 技報堂出版. 篠原秀俊・八木康史・谷内田正彦(2003)IBR と MBR を併用した空間モデリングとウォークスルー 環境,「情報処理学会研究報告.CVIM」,2003(2). 辻求・入澤元・下垣豊・今野達夫・柴崎亮介・趙卉菁・ 東明佐久良・山崎由喜・吉原章博・羽山和紀(2005) 車両型搭載センサを用いた 3 次元都市空間モデル の自動構築.「GIS −理論と応用」,13(1),91-96. 松 村 一 保・ 安 井 嘉 文・ 川 本 紀 夫(2010)Mobile Mapping System を利用した地下埋設物設計図の 作成に関する効率化の評価.「地理情報システム 学会講演論文集」,19,3D-3(CD-ROM). 吉川眞(2007)ディジタルシティと VR.「都市計画」, 270,47-50. 吉川眞(2011)ディジタルシティの構築.「測量」, 61(5),8-9. 吉川眞(1998)都市・地域情報の視覚的表現ツール. 「都市計画」,46(6),53-56. 吉田光伸・石原隆一・小崎真和・瀧口純一(2009)モー ビルマッピングシステムを用いた道路三次元情報 の活用.「三菱電機技報」,83(5),322-325. Amano, T. and Yoshikawa, S. (2011) Facade Modeling
with Mobile Mapping System Data. Proceedings of the
(a) (b)
12th International Conference on Computers in Urban Planning and Urban Management (CUPUM 2011), 207 (USB Memory).
Gröger, G., Kolbe, T. H., Czerwinski, A. and Nagel, C. (2008) OpenGIS City Geography Markup Language (CityGML) Encoding Standard Version 1.0.0, Doc. No. 08-007r1, International OGC Standard, Open Geospatial Consortium.
Haala, N. and Brenner, C. (1998) Interpretation of Urban Surface Models Using 2D Building Information. Com-puter Vision and Image Understandings, 72(2), 204-214. (2012年1月26日原稿受理,2012年6月9日採用決定,