二慣性系に対する定常発振制御に基づく共振周波数推定手法の安定性解析
7
0
0
全文
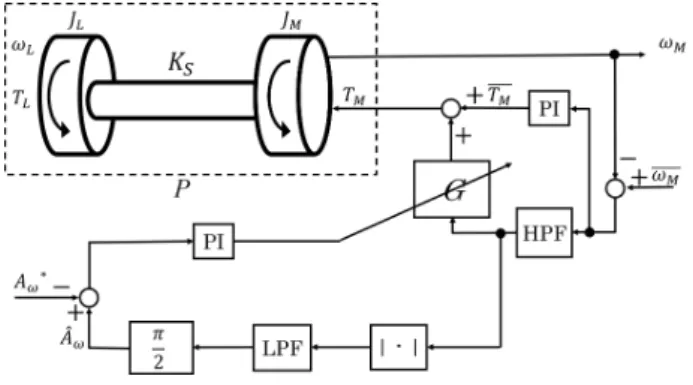
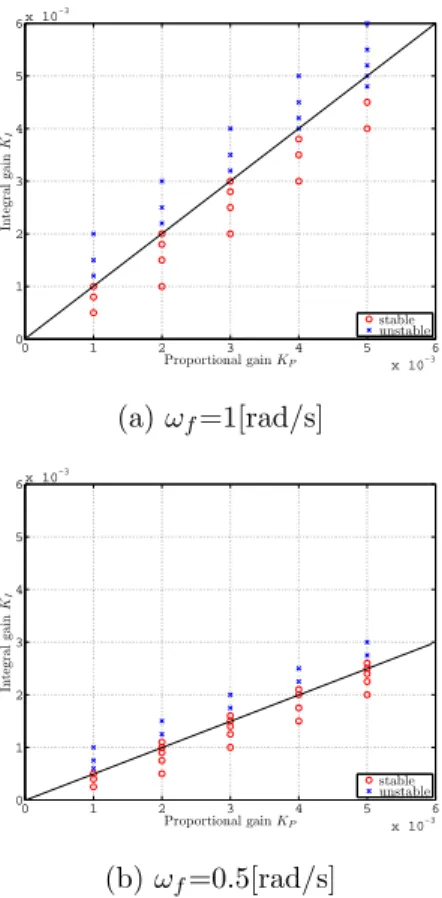
(2) Fig. 1: Experimental apparatus. Fig. 2: Block diagram of feedback system. Table 1: Experimental equipments. 標値 A∗ω 一定とするために,平均角速度まわりの振幅 ˆω との偏差で別の PI 補償器を駆動し,その の推定値 A. PC D/A counter PIO A/D Driving motor. Driven motor. Shaft spring. Inertial load (HIGH) Inertial load (LOW). Dell Dimension 2100 / Fedora Core 1 (RTLinux 3.2-pre3, Linux kernel 2.4.22) CONTEC DA12-4(PCI) (12bit, 10µs) CONTEC CNT24-4(PCI)H (24bit, 1MHz) Contec PIO-32/32T(PCI) (Parallel input output, 32bit 200ns) CONTEC AD12-16(PCI) (12bit, ±5V 10µs) YASKAWA ELECTRIC CORPORATION SGD7S-1R6A00A, SGM7J-02AFA21 (rated pow. 200 W, rated torque 0.637 Nm(max 2.23 Nm), rotor inertia moment 0.263 × 10−4 kg · m2 ) speed/position detector: 20-bit encoder YASKAWA ELECTRIC CORPORATION SGD7S-1R6A00A, SGM7J-02AFA21 (rated pow. 200 W, rated torque 0.64 Nm(max 2.23 Nm), rotor inertia moment 0.263 × 10−4 kg · m2 ) speed/position detector: 20-bit encoder ϕ 3 mm × L 230 mm (The shaft is 250 mm long.) material: SUS304 ϕ 60 mm × T 13 mm, ϕ 80 mm × T 20 mm material: SS400 ϕ80 mm × T 20 mm material: SS400. ˆω は, 出力を時変ゲイン G として用いる.推定振幅 A 平均速度まわりの振動信号 ωM − ωM の絶対値信号を カットオフ周波数 ωf 1 次の LPF に通して平滑化し係 数 π/2 を乗じることで得る.. 3. 実験結果 [4, 5] 前報 [4, 5] で得た定常発振制御による時間応答の結果. を Fig.3 に示す.モータの平均角速度 ωM は 20 rad/s, 目標振幅 A∗ω を 5 rad/s,LPF のカットオフ周波数. ωf を 1(rad/s) と設定した.比例・積分ゲインに関し ては (a)KP = 0.004, KI = 0.003,(b)KP = 0.004,. KI = 0.005 となっている.ただしモータの平均角速度 ωM が定常状態になるのを待つためにモータ運転開始. 二つのサーボモータはいずれもトルク制御モードに 設定され,パソコンの D/A 変換器からの電圧指令(駆. 10 秒後から定常発振制御を開始する.赤線はモータの ˆω である.PI 角速度 ωM , 黒線は速度振幅の推定値 A. 動トルク TM 及び負荷トルク TL )で駆動される.サー. 補償器のゲインを適切に調整すると Fig.3(a) のように. ボモータに取り付けられたロータリエンコーダの信号. 目標振幅の 5 rad/s 一定で発振するように G が自動調. (1 回転あたり 65536 パルス)がカウンタボードで 4 逓. 整される.ωM は共振周波数の約 26Hz で振動してお. 倍されてパソコンに読み込まれる.そのカウント値を. り,この結果は別途取得した TM から ωM までの周波. 制御系のサンプリング周期 0.25 ms で擬似微分して各. 数応答の結果と定量的に一致している.しかし PI 補償. モータの回転速度 ωM , ωL を得る.. 器のゲインが適切でない場合は,Fig.3(b) に示すよう. 2.2. に速度振幅が目標振幅を超えて振動を続けている.G. 定常発振制御系. についても Fig.3(b) と同様に一定値に収束せずに振動. Fig.2 に制御系のブロック線図を示す.ここで P (破. を続け,定常発振制御系が不安定であることがわかる.. 線部) は駆動側トルク TM から駆動側角速度 ωM まで. 次に PI 補償器のゲイン (KP , KI ) に関する安定条件. の入出力システムである.本制御とは別に,平均角速. を調査した結果を Fig.4 に示す.実験で取得した時間. 度が所望の回転角速度 ωM になるように駆動トルクの 平均値 TM を PI 制御し,モータの回転ムラ成分を取り. 応答より数値的に安定判別を行うため,時刻 t=120∼ 130 における追従誤差 Aˆω (t) − A∗ の L2 ノルムが 0.6. 除くためにハイパスフィルタ (以下 HPF とする) を入. 未満となった場合を安定,それ以外を不安定と定めた.. れている.平均角速度まわりの振動信号 ωM − ωM を. 横軸の KP ,縦軸の KI に対して安定となった場合は赤. ゲイン G 倍したものを平均駆動トルクまわりの振動信. い丸印,不安定の場合は青いバツ印が記載され,黒い. 号として用いる.ここではゲイン G を負の方向に大き. 実線は KI = ωf KP の直線を示している.図より,実. くしていくと閉ループ系は発振状態に至る.振幅の目. 線に示す KI = ωf KP の直線より下の領域で安定であ. ω. 185.
(3) −3. 6. 40. x 10. 35. 5. Integral gain KI. 4. 25. 3. 20. M. ω (rad/s),Estimated amplitude. 30. 15. 2. 10. 1 5. 0 10. ωM ˆω A 15. 20. 25. 30. 35 Time(s). 40. 45. 50. 55. stable unstable. 0 0. 60. 1. 2 3 4 Proportional gain KP. 5. 6 −3. x 10. (a) ωf =1[rad/s]. (a) KP = 0.004,KI = 0.003 −3. 6. 50. x 10. 5. 40. Integral gain KI. ω M(rad/s),Estimated amplitude. 4. 30. 3. 20. 2. 10. 1 0. −10 10. ωM ˆω A 15. 20. 25. 30. 35 Time(s). 40. 45. 50. 55. stable unstable. 0 0. 1. 60. 2 3 4 Proportional gain KP. 5. 6 −3. x 10. (b) ωf =0.5[rad/s]. (b) KP = 0.004,KI = 0.005. Fig. 4: Closed-loop stability with experiment. Fig. 3: Time response pf the feedback system. ることがわかる.同様の条件は熱音響システムの臨界 温度比推定における定常発振制御系の実験でも得られ ており,制御対象が単純な 2 次振動系モデルの場合に は αKI < 0 かつ α(KI − ωf KP ) > 0 であることが理. Fig. 5: Model of two-inertia system. 論的に示されている [6, 8].ここで,α は制御対象の入 出力信号間の位相関係を定める実数である. 本論文でも実験的に得られた安定条件の妥当性を理. JM ω˙ M = TM − TS. 論的に検証することを目的とするが,次節でも示すよ. TS = KS θr + CS (ωM − ωL ). うに二慣性系の物理モデルは回転軸系が一体で回転し 続ける剛体モードに対応する積分器を有しており,従. JL ω˙ L = TL + TS. 来知られる積分器を持たない 2 次振動系モデルに基づ. (1) (2) (3). ただし,TS は軸のねじりトルク,θr は両慣性の相対角. く安定条件がそのまま成り立つかどうかは自明ではな. 度,JM は駆動側慣性モーメント,JL は従動側慣性モー. いことに注意されたい.. メント,KS は軸のねじりばね定数,CS は軸の減衰係 数である. TM から ωM の伝達関数 P (s) は次式で与えられる.. 4. 物理モデルの導出と問題設定. P (s) =. 本節では二慣性系の物理モデルが積分器と 2 次振動. s(JM. JL s2 + CS s + Ks JL 2 + JL )( JJMM+J s + CS s + KS ) L. (4). ここで,ωn ,ζ ,r をそれぞれ共振角周波数,減衰比,. モデルの積で表されることを示した後,簡易的に安定. 慣性比とすると次式が成り立つ.. 性解析を行うために積分器を省略する二通りの場合を. 1 (1 + r)s2 + 2ζωn s + ωn2 (5) · s(JM + JL ) s2 + 2ζωn s + ωn2 JL ¯ JM JL CS KS r= , J= ,2ζωn = ¯ ,ωn2 = ¯ JM JM + JL J J P (s) =. 含め三つの問題を設定し,本論文を動機づける.Fig.5 の二慣性系を考える.この運動方程式は次式で与えら れる.. 186.
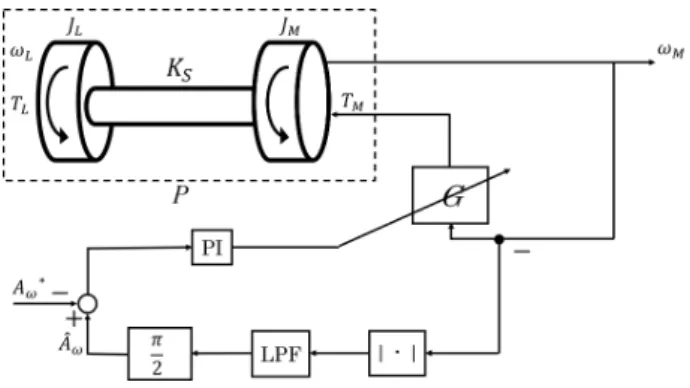
(4) すなわち,二慣性系の物理モデルは剛体モード (積分 器) と 2 次振動系モデルの積から成る.2 次振動モデル に対する定常発振制御系の安定性解析 [6, 7, 8] が既に 行われていることと,本研究でも定常状態においては 平均速度回りに振動が生じており,本質的には 2 次振 動モデルであると考えられることから,(5) 式の剛体 モードを省略したモデル P˜ (s). (1 + r)s2 + 2ζωn s + ωn2 P˜ (s) := s2 + 2ζωn s + ωn2. (6). で安定性解析を行うことをまず考えた.しかし,この. Fig. 6: Block diagram of feedback system at case 2. 妥当性をシミュレーションで検討したところ,このモ. and case 3. デルに対する定常発振制御系は(期待に反して)発振. 5. しなかった.この理由を調べるため次に,従動側を固 定した剛体モードのないモデル P¯ (s)(後述するように. 安定性解析 2 次振動モデルの場合において定常発振制御系の安. P (s) の JL → ∞ の極限として得られるモデル)を検. 定性解析が行われている.PI 補償器のゲイン及び振幅. 討し,この場合には定常発振制御が可能であることが. 推定用の LPF のカットオフ周波数がある条件を満たせ. 分かった.これは,並列接続された積分器を省略する. ば定常発振制御系は安定で,PI 補償器の出力を時変ゲ. 場合に相当する.すなわち, ( ) 1 rs2 P (s) = · 1+ 2 (7) (JM + JL )s s + 2ζωn s + ωn2 r 1 s + = · (JM + JL )s JM + JL s2 + 2ζωn s + ωn2 (8). イン(実数)として含む開ループ系のナイキスト軌跡 が (-1,0) に重なり(安定限界となり),制御対象の信 号は目標振幅で定常発振し,PI 補償器及び LPF の状 態は対応する平衡点に収束する [8]. 本論文では,従来研究とは異なり(PI ゲインなどに 関する安定条件を示すのではなく)定常発振制御系が 発振しない場合,システムのナイキスト軌跡が (-1,0). と表したときの第二項. P¯ (s) :=. JM. に重なる時変ゲインが存在しない場合に相当すること. r s · + JL s2 + 2ζωn s + ωn2. を示す.. (9). case 1 から case 3 のナイキスト軌跡を Fig.7 に示す. 青線が制御対象 P (s), P˜ (s), P¯ (s) のナイキスト軌跡,. である1 . 以上のことを明らかにするため本論文では,次の三. 赤線が時変ゲイン G の収束値を乗じた開ループ系の. つの場合を設定し,第 5 節でナイキスト軌跡に基づく. ナイキスト軌跡である.Fig.7(a) より、元の制御対象. 定常発振制御系の安定性解析,第 6 節でシミュレーショ. P (s) の場合(case 1)には,青線に示すナイキスト軌. ンの結果を示す.. 跡が原点以外で実軸と交わる点(共振周波数における 点)が存在し,時変ゲインの収束値(負の実数)を乗. case 1. 元の問題:(5) 式の P (s) に対する Fig.2 の定. じたナイキスト軌跡が (-1,0) を通過することがわかる.. 常発振制御系.. ただし,case 1 の積分器において (5) では. 1 s. と定義し. たが,その場合システムは定常状態にならず低周波数. case 2. 直列接続された剛体モードを省略した問題: (6) 式の P˜ (s) に対する Fig.6 の制御系.. の大きな変動が現れた.そこで,case 1 では実験と同 様に剛体モードが減衰するように積分器. 1 s. を. 1 s+ϵ. と置. き換えている.(ϵ は減衰を表す.) しかし,直列接続さ れた積分器を省略した P˜ (s) の場合(case 2)には,青. case 3. 並列接続された剛体モードを省略した問題: (9) 式の P¯ (s) に対する Fig.6 の制御系.. 線が原点以外で実軸と交わっておらず,ナイキスト軌 また Fig.6 に示すように case 2 および case 3 の制御. 跡が (-1,0) を通過するような時変ゲインは存在しない. 系は問題の簡略化のため,モータ角速度を ωM にする. PI 補償器および回転ムラ除去用の HPF を省略した場. ことから定常発振制御系は発振しない.これに対して、 並列接続された積分器を省略した P¯ (s) の場合(case. 合に設定した.. 3)は,case 1 と同様に青線が原点以外で実軸と交わっ. 1 係数を除いて. する.. limJL →∞ P (s) =. 1 JM. ·. s 2 s2 +2ζωn s+ωn. ており、適当な時変ゲインの収束値が存在しナイキス. に一致. ト軌跡が (-1,0) を通過する.case 2 と 3 の違いは 2 次. 187.
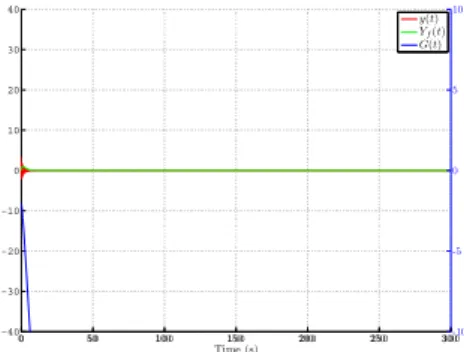
(5) 6. Nyquist Diagram. シミュレーション. 0.8. 二 慣 性 系 の モ デ ル (case 1) に つ い て の MAT-. 0.6. LAB/Simulink を用いた数値シミュレーション結果を. 0.4. Imaginary Axis. 0.2. −0.2. Fig.8 に示す.赤線が出力信号 y(実験時の ωM に相当), ˆω に相当),青線がゲ 緑線は振幅の推定値 Yˆ (実験時の A. −0.4. イン G である.また,数値シミュレーションに使用した. 0. 各パラメータは JM =1,JL =10,ωn =2π × 26,ζ=0.02. −0.6. −0.8 −1.2. −1. −0.8. −0.6. −0.4. −0.2. 0. である.. 0.2. Real Axis. Fig.8(a) は KP = 0.4, KI = 0.3 の場合を示してい. (a)case 1. る.時変ゲイン G が負の方向に増加することで,発振 が開始し大きな振動を生じていることがわかる.その 後 y の振幅および振幅の推定値 Yˆ は目標振幅 Y ∗ =5 に. Nyquist Diagram 5. x 10. 1. 収束し,G についても一定値に収束している.KI を大 0.5. Imaginary Axis. きくした場合 (KI =0.5) を Fig.8(b) に示す.振幅の推 定値 Y ∗ とゲイン G は振動を続け一定値に収束しない.. 0. この PI 補償器のゲインの大小関係により,制御性能が −0.5. 異なる結果は 3 節の実験結果とも整合している. 次に case 2 の数値シミュレーション結果を Fig.9 に. −1. −6. −4. −2. 0 Real Axis. 2. 4. 6 4. 示す.Fig.9 では前節の Fig.7(b) からわかるように G. x 10. が負の方向に増加してもシステムは発振しないことが. (b)case 2. わかる.これにより G は一定値に収束せず,常に負の Nyquist Diagram. 方向に増加し続ける.. 0.8. 最後に case 3 の数値シミュレーション結果を Fig.10. 0.6. 0.4. に示す.Fig.10 より,KP が KI が大きい場合において. Imaginary Axis. 0.2. 0. 振幅が目標値に収束し Fig.10(a),KI が大きい場合に. −0.2. は目標値に収束しなかった Fig.10(b).Fig.10 も Fig.8 と同様の傾向を示しており,モータ角速度を平均角速. −0.4. 度にする PI 制御系および HPF は定常発振制御系に影. −0.6. −0.8 −1.5. −1. −0.5. 0. 0.5. 1. 1.5. 響なく制御が行えることを数値シミュレーションより. 2. Real Axis. 確認した.. (c)case 3. 今後は case 1 における,HPF のカットオフ周波数に よる共振周波数の推定精度への影響を調査する.. Fig. 7: Nyquist plot. 7. まとめ 本論文では,二慣性系のねじり共振周波数を推定す. 振動モデルの分子多項式の次数であり,case 3 は従来. るために平均速度回りの速度振幅を目標値一定とする. 知られている熱音響システムの臨界温度比推定の場合. 定常発振制御系(偏差で駆動される PI 補償器の出力. [8] と同一(1 次)である.ただし従来研究 [8] では、熱. を,平均速度回りの速度からトルクを生成するための. 音響システムにおける管路長に応じて制御対象の入出. 時変ゲインとする制御系)について,これまでに実験. 力信号間の位相差をむだ時間により別途調整しており,. 的に得られていた安定条件を物理モデルに基づいて検. 二慣性系の場合にも入出力信号間の位相差が適切でな. 討した結果以下の知見を得た.まず,実験と同様に剛. い(case 2)と定常発振ができないが,適切であれば. 体モード(積分器)を含む制御対象,平均速度の補償. (case 3)定常発振制御ができると言える.この位相関. 器,回転ムラ除去用の HPF を有する制御系についてシ. 係は従動側慣性によらず不変であることから,従来研. ミュレーションを行った結果,実験にほぼ一致する安. 究 [8] とは異なり、二慣性系の場合には従動側慣性によ. 定条件が得られた.次に,解析の簡単のため制御対象. らず常に同一の定常発振制御系で共振周波数推定が行. を積分器と 2 次振動系の (i) 直列接続とする場合と (ii). える利点がある.. 並列接続とする場合について,積分器,平均速度の補. 188.
(6) 40. y(t) Yf (t) G(t). 30. 10. 5. 20. 10. 0. 0. −10. -5. −20. −30 40 −40 0. 50 50. 100 100. 150 150. 200 200. 250 250. y(t) Yf (t) G(t). -10 300 300. Time (s) 30. 5. 20. (a)Stable response with KP =0.4,KI =0.3. 10. 10. 40. y(t) Yf (t) G(t). 30. 10. 5. 20. 0. 0. −10. -5. −20. 10. −30. 0. 0. −40 0. 50 50. 100 100. 150 150. 200 200. 250 250. -10 300 300. Time (s) −10. -5. −20. Fig. 9: Time responses by simulation(case2). −30. −40 0. 50 50. 100 100. 150 150. 200 200. 250 250. -10 300 300. 40. y(t) Yf (t) G(t). Time (s) 30. (b)Unstable response with. 20. KP =0.4,KI =0.5. 10. 5. 0. 0. Fig. 8: Time responses by simulation(case1). 10. −10. -5. −20. 償器,HPF を除去して簡略化された制御系の安定条件. −30. を調べた結果,(i) 直列接続の場合には開ループ系のナ. −40 0. 50 50. 100 100. 150 150. 200 200. 250 250. -10 300 300. Time (s). イキスト軌跡を安定限界とする時変ゲインが存在せず. (a)Stable response with KP =0.4,KI =0.3. 定常発振が生じないこと,(ii) 並列接続の場合には適当 な時変ゲインが存在し制御対象の共振周波数で定常発. 40. 振が生じることを,ナイキスト軌跡に基づく解析及び. 30. シミュレーションにより示した.共振周波数に対して. 20. HPF のカットオフ周波数を十分低くできない場合の推. y(t) Yf (t) G(t). 10. 5. 10. 定精度を検討することなどが今後の課題である.. 0. 0. −10. 参考文献. -5. −20. −30. [1] 株式会社安川電機,Σ-7 シリーズ AC サーボドラ. −40 0. 50 50. 100 100. 150 150. Time (s). 200 200. 250 250. -10 300 300. イブ Σ―7S シリーズユーザーマニュアル サーボ. (b)Unstable response with. パックアナログ電圧・パルス列指令形 SIJP S800001. KP =0.4,KI =0.5. 26O. Fig. 10: Time responses by simulation(case3). [2] Wen-Yu Wang,An-Wen Shen:Detection and Reduction ofMiddle-Frequency Resonance for Industrial Servo with Self-Tuning Lowpass Filter,Journal of Control Science and Engineering,Volume 2012, Article ID 478907, 12 pages(2012) [3] Sheng-Ming Yang,Shih-Chuan Wang:The Detection of Resonance Frequency in Motion. 189.
(7) Control Systems,IEEE T rans. Ind. Appl,vol.50, no.5,pp.3423-3427(2014) [4] 田上和叡,小林泰秀,定常発振制御に基づく二慣性 系における共振周波数の推定,第 62 回自動制御連 合講演会,講演番号 2J2-05 (2019). [5] 田上和叡,小林泰秀,二慣性系に対する定常発振制 御に基づく共振周波数推定手法の実験的検証,日 本機械学会北陸信越支部第 57 期総会,講演番号 . D033 (2020) [6] 小林泰秀, 櫻井一晃, 山田昇:臨界温度比推定のため に熱音響エンジンを定常発振させる時変ゲインを用 いた定エネルギー制御系の安定性解析, 第 58 回自 動制御連合講演会,講演番号 2H3-3 (2015). [7] 永井和貴,斎藤浄,稲田千翔之,小林泰秀:振動体 の振幅を目標値一定とする振動発電機のフィード バック制御;システム制御情報学会誌,VOl.32 巻,. No.8 号,pp.318-326(2019) [8] 小林泰秀,比例積分補償器の出力を時変係数とす る定常発振制御系の安定性解析,システム制御情 報学会論文誌,VOl.31 巻,No.11 号,pp.385-391 (2018). 190.
(8)
図
関連したドキュメント
Alternating-current Magnetic Field Analysis Including Magnetic Saturation by a Harmonic Balance Finite Element Method.By.. Sotashi Pamada,Member,Junwei
In the sea of Japan side, the possibility of tsunami generation by ocean trench type of earthquakes may be low, therefore investigation and study of tsunami measures against this
植木祭の開催 愛林デーの制定 愛林植栽日の制定 植樹デーの制定 愛林日の制定 植栽日の制定 植柵デーの制定
第一の方法は、不安の原因を特定した上で、それを制御しようとするもので
算処理の効率化のliM点において従来よりも優れたモデリング手法について提案した.lMil9f
Series of numerical analysis to estimate structural frequency and modal damping were conducted for a two-dof model using the simulated external forces induced by impulse force and
パスワード 設定変更時にパスワードを要求するよう設定する 設定なし 電波時計 電波受信ユニットを取り外したときの動作を設定する 通常
「核原料物質,核燃料物質及び原子炉の規制に関する法律」 (昭和32年6月10日
