1. 緒言 人間の身体には数多くの筋肉や関節が存在してお り,各課題を達成するための方法や組み合わせは無数 に存在する.この冗長的な身体を人がどのように制御 しているか調査する方法として,Uncontrolled…mani-fold…analysis(UCM解析)という手法がある.これは 豊富性の原理(principle…of…abundance)に関連した 手法であり,身体内の筋肉や関節は課題を達成するた めに協調して運動していることを前提に行われる. UCM解析を用いた先行研究では,健常者や有疾患者 における,リーチ動作などの上肢課題や歩行などの全 身課題について調査を実施しており,我々もまた,歩 行中の身体の制御が転倒リスクに与える影響について 調査してきた.本稿では,日常生活でも頻回にみられ るリーチ動作を例に身体の冗長性の問題や豊富性の原 理について概説した上で,UCM解析を歩行に応用し た研究を紹介する.
高齢者における歩行中の運動制御と転倒との関連
山縣 桃子
1-3),建内 宏重
4),市橋 則明
3)The relations of motor abundance during gait with fall risk in older adults
Yamagata Momoko1-3), Tateuchi Hiroshige4), Ichihashi Noriaki3)Abstract
Our…body…has…more…elements…such…as…joints…and…muscles…than…needed…to…perform…any…activities…of… daily…living,…including…gait.…As…an…approach…to…the…problem…of…motor…redundancy,…the…principle…of… abundance…was…suggested.…The…principle…views…the…apparently…redundant…design…of…the…body…as… a…useful…and…crucial…mechanism…stabilizing…different…performance…variables…in…a…task-specific…way.… There… are… many… papers… based… on… this… idea… using… the… framework… of… the… uncontrolled… manifold… (UCM)… hypothesis.… The… UCM… hypothesis… assumes… that… the… central… nervous… system… acts… in… an… abundant…space…of…elemental…variables…and…organizes…in…that…space…a…subspace…corresponding…to…a… stable…value…of…a…performance…variable.…The…UCM…method…has…been…developed…for…various…actions,… including…multi-joint…reaching,…standing,…and…gait,…and…used…for…different…subjects…(e.g.,…younger… adults,… older… adults,… patients… with… neurological… impairment).… Using… the… method,… we… explored… if… segment…configurations…contributing…to…the…stability…of…swing…foot…and…center…of…mass…are…related… to…falling…risk…in…older…adults.…With…this…paper,…we…introduce…our…previous…studies…as…well…as…the… basic…concept…of…motor…redundancy…and…the…principle…of…abundance.… ey words: K Motor…abundance,…Uncontrolled…manifold,…Gait,…Fall,…Older…adults 1 )…神戸大学大学院…人間発達環境学研究科…人間発達専攻 … Human…Development,…Graduate…School…of…Human…Development… and…Environment,…Kobe…university 2 )…日本学術振興会…特別研究員…(PD) … Research…Fellow…of…Japan…Society…for…the…Promotion…of…Science 3 )…京都大学大学院…医学研究科…人間健康科学系専攻…理学療法学講座 … Department… of… Physical… Therapy, … Human… Health… Sciences,…
Graduate…School…of…Medicine,…Kyoto…University
4 )…京都大学大学院…医学研究科…人間健康科学系専攻…予防理学療法 学講座(産学共同講座)
… Department… of… Preventive… Physical… Therapy,… Human… Health… Sciences,…Graduate…School…of…Medicine,…Kyoto…University,…Kyo-to,…Japan 投稿責任者:山縣桃子 連絡先:〒657-8501 神戸市灘区鶴甲3丁目11番 E-mail:[email protected]
総 説
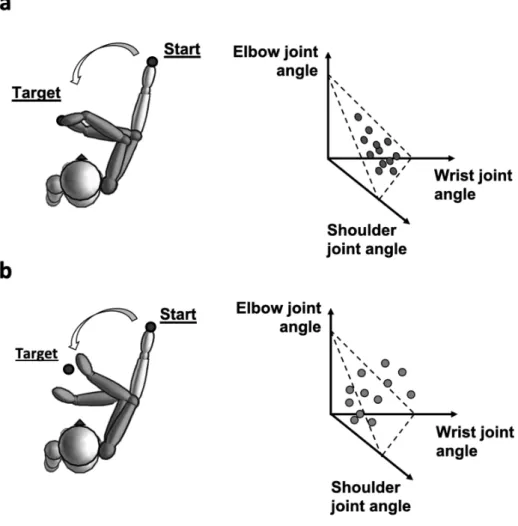
2. 身体の制御 2. 1. 身体の冗長性 人間の身体は数多くの筋肉や関節から構成されてお り,人が様々な環境においてこの冗長な身体をどのよ うに制御しているかについて,これまで多くの研究が 行われてきた.Bernsteinが行った有名な研究では, 鍛冶職人が繰り返しハンマーを振り下げるとき,試行 間で空間内の関節位置が大きく変動するのに対し,ハ ンマー位置はあまり変動しないことが明らかになっ た1).このような現象は日常生活の中でも多くみられ る.例えばテーブルの上にあるコップに手を伸ばすよ うなリーチ動作を何度も行うと,関節角度などの関節 運動は試行間で大きく変動するが,手の変動は比較的 小さくなる.つまり,コップへのリーチ課題を正確に 行うことができても,我々の身体を構成する関節など の要素は常に変動を伴っている.このように,日常生 活内の様々な動作において,私たちは関節角度などの “運動のかたち”ではなく,合目的的に身体を制御し ていることがわかる. コップへのリーチ動作やハンマーの振り下ろし動作 など,比較的単純そうに見える動作であってもその運 動制御は複雑である.これは,達成したい課題に対し てそれを制御する自由度が多すぎること,つまり身体 が冗長であることに起因しており,これは冗長性の問 題と呼ばれている1).先ほどのコップへのリーチ課題 を例にとると,リーチ動作は 3 自由度であるのに対し て,それを制御する関節は肩関節 3 自由度・肘関節 1 自由度・前腕 3 自由度(橈尺関節 1 自由度,手関節 2 自由度)の計 7 自由度となる.このようにリーチ動作 に必要な変数の数は運動課題を表す変数の数よりも大 きくなり,運動を達成するための関節の組み合わせは 無数に存在することとなる…(Fig.1).関節だけでなく 筋肉や靭帯などの軟部組織を考慮すると運動制御はさ らに複雑化し,数え切れないほどの要素がリーチ動作 に関与していることがわかる.このような冗長な身体 の制御は豊富性の原理と関連づけられている2,3). 2. 2. 豊富性の原理 Bernsteinらの研究に基づき,身体は冗長性の問題 を解決するために,ある特定の筋肉や関節の群を 1 つ の単位として運動させることで,制御する自由度を単 純化していると考えられてきた1).この概念が発展し てできた考え方が豊富性の原理であり,この原理は, Bernsteinらの冗長な自由度を除去するという考えで はなく,むしろその冗長な自由度を柔軟に利用すると いう考えである2,3).これは,日常生活の中でみられる 様々な運動において支持されている4-6).例えばリー チ動作では,通常肩関節・肘関節・手関節が主に運動 するが,肩関節屈曲の可動性が制限されたような患者 では,通常ではあまり利用しない体幹の回旋や側屈を うまく利用してリーチ課題を達成するかもしれない. またリーチの途中で何らかの外乱が起こった場合は, 通常とは異なる関節運動を用いてコップへのリーチ動 作を達成するかもしれない.このように,人は冗長な 身体を有しているからこそ身体内部の障害や外部の環 境変化が起こった場合でも新しい方法で課題を達成さ せることができる.つまりこの原理では,冗長な身体 を“問題”として扱うのではなく,柔軟な対応を可能 にする“恩恵”として扱っている. 3. Uncontrolled manifold (UCM) UCMアプローチを用いた研究によって豊富性の原 理は支持されてきた7).この手法では,関節などの身 体の要素は課題達成のために組織立てられており,課 題達成に影響しない身体の変動を神経系のノイズ,つ まり削除すべき要素ではなく,運動に寄与する重要な 要素として扱っている5,7). 例えば,上腕を固定し平面上のある地点からターゲ ットにリーチするような単純な動作では,運動を構成 する要素は肘関節の屈伸と手関節の掌背屈の 2 自由度 となり,毎回正確にターゲットへのリーチを行うこと ができても,試行間で肘関節や手関節の運動は変動す る…(Fig.2a).具体的には,肘関節が通常よりも屈曲し た試行では,それを補うように手関節が背屈方向に運 動することで最終的な手の位置は試行間で変化せず, 正確にターゲットにリーチすることができる.このよ うに手をターゲットにリーチするという課題の達成に 影響を与えない関節角度の組み合わせの集合をUCM (コントロールされない集合体)と呼ぶ.もしもこの Fig. 1 An illustration of reaching task with a three-joint
arm.
In…even…simple…reaching…task,…there…are…an…infinite…num-ber…of…ways…to…perform…same…movement.
Title:JJPTF 23- 総説 1 山縣 .indd p2 2021/02/27/ 土 10:35:43 Title:JJPTF 23- 総説 1 山縣 .indd p3 2021/02/27/ 土 10:35:43
肘関節と手関節の関係性が崩れターゲットに対して適 切にリーチできなかった場合,UCMに対して直交す る方向の変動が大きくなる…(Fig.2b).このような UCMに沿った変動(以下,VUCM)とUCMに直交する
変動(以下,VORT)の量を比較することで,関節角度 の組み合わせが目的を達成するために構造化されてい るかを評価することができる.VUCMが高くVORTが低 い場合,目的を達成するために関節が協調して運動し ていることを意味し,先行研究では,VUCMの増大は 外乱など環境の変化に適応するために重要な要素であ ることが報告されている8). Fig.3にはリーチ動作における要素を肩関節・肘関 節・手関節の 3 自由度に増やした例を示したが,この 場合も 2 自由度の例と同様の解釈ができる.このよう にUCMの手法は多自由度に対して適応可能であり, これまで上肢セグメントを利用する課題だけでなく, 立位や歩行など全身セグメントを利用するような課題 にも適応されてきた9-12). 4. UCM解析を用いた研究 4. 1. 歩行時の目的変数の決定 UCM解析を進めていくためには,目的変数と要素 変数を事前に決定しておく必要がある.目的変数は課 題達成のためのゴール,つまり課題において最も重要 な変数であり,この目的変数を制御するための要素が 要素変数である.Fig.2の例では目的変数は手の位置, それを制御する要素変数は肘関節と手関節の関節角度 となり,関節角度の組み合わせが目的を達成するため に構造化されているかをUCM解析によって評価する ことが可能となる.このような課題では比較的容易に 目的変数を決定することができるが,歩行課題の場合 Fig. 2 2D space of joint angles and the UCM during reaching task.
The… dashed… line… corresponds… to… the… uncontrolled… manifold… (UCM)… for… an… accurate… reaching…task…using…elbow…and…wrist…joints.…VUCM…is…a…variance…along…the…UCM…space,… that…does…not…affect…performance,…while…VORT…is…a…variance…orthogonal…to…the…UCM… space…affects…the…performance.
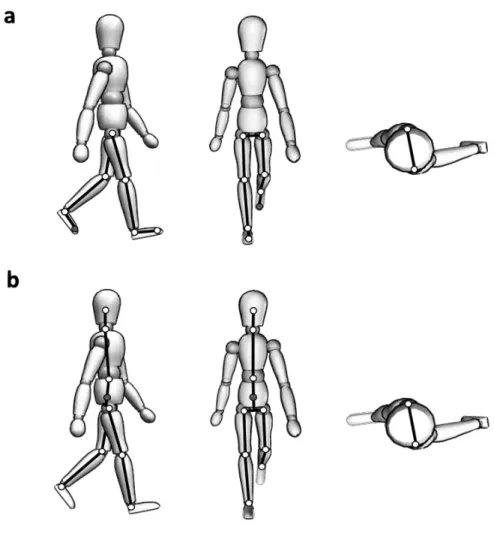
は非常に複雑で,何を最も重要な変数,つまり目的変 数と設定するかが分かりにくい.歩行時には身体重心 を制御しながら遊脚足部を適切に挙動させる必要があ ることから,我々を含め,先行研究では遊脚足部もし くは身体重心を目的変数とした研究が多い. 4. 2. 遊脚足部とセグメントの協調 遊脚足部は,歩行中の重要なエンドエフェクターで あり,下腿や大腿など下肢セグメントの運動によって 制御されている.加齢変化が遊脚足部を制御するため のセグメント協調に与える影響を調査した研究では, 若年者と比較して高齢者のVUCMが増大しており,高 齢者は遊脚足部を制御するために下肢セグメントをよ り協調させて歩行していることが明らかになった13). 脳卒中患者でも類似した結果が報告されており14), VUCMの増大は加齢や疾患による運動機能の低下を代 償するための戦略である可能性がある.しかし,この ような歩行中のVUCMやVORTの増減が転倒リスクに影 響を与えるかは不明であった.そこで我々は地域在住 の健常高齢者を対象に,転倒とUCM変数との関連を 調査した15,16). 1 つ目の研究として,過去 1 年間の転倒歴とUCM 変数との関連を調査した15).過去 1 年間に転倒歴のあ る健常高齢者10名と転倒歴がない健常高齢者14名を対 象に歩行計測を行い,UCM解析によって歩行中の下 肢セグメントが遊脚足部を制御するために協調して運 動しているかを定量化した…(Fig.4a).その結果,過去 1 年間に転倒経験のある高齢者は,転倒経験のない高 齢者よりもVUCMが大きく増加していることが明らか になった.過去の転倒経験に関連したこの大幅な VUCM増大は,再び転倒しないように慎重に歩行した 結果である可能性がある.しかし,実際にこの戦略が 将来の転倒予防に有用な代償戦略なのかは不明であっ た.
Fig. 3 3D space of joint angles and the UCM during reaching task.
The…dashed…triangle…area…corresponds…to…the…uncontrolled…manifold,…UCM…for…an…ac-curate… reaching… task… using… three… joints,… shoulder,… elbow,… and… wrist… joints.… For… ab-breviation,…see…the…caption…for…Fig…2.
Title:JJPTF 23- 総説 1 山縣 .indd p4 2021/02/27/ 土 10:35:43 Title:JJPTF 23- 総説 1 山縣 .indd p5 2021/02/27/ 土 10:35:43
そこで 2 つ目の研究として,UCM変数と将来の転 倒発生との関連を調査した16).地域在住の健常高齢者 28名を対象とし,ベースライン時に歩行計測を行った. 歩行中のデータからUCM変数を算出し,その 1 年後 にアンケート調査により転倒発生の有無を聴取した. 1 年間で転倒した高齢者は12名,転倒しなかった高齢 者は16名であり,ロジスティック回帰分析の結果,ベ ースライン時に遊脚中期のVUCMが高い人ほど将来転 倒しており,遊脚前期や後期でも同様の傾向がみられ ることが明らかになった…(Table.1).歩行時の遊脚足 部を十分に制御できていたにも関わらず将来の転倒発 生リスクが高まっていたという我々の結果から,将来 転倒するような高齢者は,遊脚足部を過度に意識する ことで身体重心などの他の要素が制御不良となってい る可能性を考えた.この仮説を検証するため,我々は 歩行中の身体重心を制御するためのセグメント協調と 将来の転倒発生との関連を調査した(次項参照). 4. 3. 身体重心とセグメントの協調 高齢者は身体重心の不適切な移動によって転倒する ことが多く17),特に歩行中は矢状面よりも前額面の不 安定性が高まることが知られている18).身体重心を制 御するためのセグメント協調をUCM解析によって調 査した研究では,ダウン症患者や片麻痺患者は,健常 者に比べて歩行中のVUCMが増加することが報告され ている19,…20).これは,疾患による身体機能の低下を VUCM増加によって補った結果であると考えられてい るが,身体重心を制御するためのセグメント協調の低 下と将来の転倒リスクとの関連については不明であっ た.そこで我々は,前額面の身体重心を制御するため のセグメント協調と転倒発生との関連について調査を 実施することとした.
Fig. 4 An illustration of body segments controlling to performance variable.
(a)…Seven…segments…and…14…degrees…of…freedoms…were…used…as…elemental…variables…to… control…performance…variable,…swing…foot…trajectories…(filled…circle).
(b)…Eight…segments…and…16…degrees…of…freedom…were…used…as…elemental…variables…to… control…performance…variable,…center…of…mass…trajectories…(filled…circle).
対象者は先行研究16)と同様の健常高齢者28名とし, ベースライン時の身体重心に対するセグメント協調と そ の 後 1 年 間 の 転 倒 発 生 と の 関 連 を 調 査 し た… (Fig.4b).その結果,前額面のうち左右方向の身体重 心を制御するセグメント協調に違いはみられなかった が,鉛直方向の身体重心については,将来転倒した高 齢者のVORTが有意に増大していることが明らかにな った.つまり,歩行中に鉛直方向の身体重心を不安定 にするようなセグメント運動が大きい高齢者ほど,そ の後に転倒してしまう可能性が示唆された.本研究の 高齢者が実際にどのような状況で転倒したのかについ ては調査できていないため,今後は実際の転倒の原因 とUCM変数の変化を比較することで,転倒について さらに知見が深まると考える. 4. 4. 身体重心と遊脚足部の制御 我々の研究から,将来の転倒発生リスクが高い高齢 者の特徴として,歩行中に下肢セグメントの協調によ って遊脚足部は十分に制御できているが,身体重心は 制御不良となっていることが明らかになった.遊脚足 部は下肢セグメントの先端に位置し視覚的にも注意を 向けやすい要素であるのに対して,身体重心の位置は 想定しにくく意図的に注意を向けるのが困難であるこ とが影響しているかもしれない.しかし,遊脚足部は 歩行中の支持基底面の生成やクリアランスの確保に重 要な役割を持っているため,歩行中に遊脚足部の制御 が不要というわけではない.歩行のような複雑な動作 においては遊脚足部と身体重心の制御が共に必要であ り,一方の要素を過度に制御し,もう一方の要素が制 御不良になってしまうと転倒リスクが増大する可能性 が示唆された. 5. 最後に 様々な研究により,リーチ動作などの単純な課題だ けでなく歩行などの複雑な運動においても,身体内の 関節や筋肉は合目的なかたちで構造化され変動してい ることが明らかになっている.このように,身体変動 の中には動作を行う上で必要な変動も存在するため, 動作中にみられる身体変動の大小を評価するだけでな く,UCM解析などを用いて変動の質を評価すること も重要である.我々は遊脚足部と身体重心の挙動に着 目し,転倒とUCM変数との関連について研究を行っ てきたが,実際にどのような介入方法がセグメントの 協調を高め,転倒予防に有効かは不明なままである. 今後は,臨床に応用できるような介入方法の確立を目 指す必要がある. 献 文 1 )…Bernstein…NA:…The…co-ordination…and…regulation… of…movements.…Oxford,…Pergamon,…1967
…2…)…Gelfand… IM,… Latash… ML:… On… the… Problem… of… Adequate… Language… in… Motor… Control.… Motor… Control…2:…306–313,…1998
3 )…Latash…ML:…The…Bliss…of…Motor…Abundance.…Exp… brain…Res…217: 1–5,…2012
…4…)…Yamagata… M,… Falaki… A,… Latash… ML:… Stability… of… vertical… posture… explored… with… unexpected… mechanical… perturbations:… synergy… indices… and… motor…equivalence.…Exp…Brain…Res…236:…1501–1517,… 2018
5 )…Latash…ML:…Towards…physics…of…neural…processes… and… behavior.… Neurosci… Biobehav… Rev… 69: 136– 146,…2016
Table 1 Logistic regression
Gait…velocity…was…used…to…calculate…OR…for…adjusted…predictors.…The…p-values…were…adjusted…by…the…method…of…Holm… correction…across…the…three…swing…phases.
Predictor UCM…variables…and…fall…status…OR…(95%…Confidence…Interval)
early-swing p-value mid-swing p-value late-swing p-value VUCM…(10-4) 1.50…(1.06-2.11)… 0.02 1.39…(1.08-1.78) 0.01* 1.06…(1.00-1.12) 0.03 VORT…(10-4) 1.01…(0.91-1.13) 0.82 1.03…(0.97-1.09) 0.31 1.04…(0.99-1.10) 0.78 Adjusted…VUCM…(10-4) 1.55…(1.04-2.29) 0.03 1.35…(1.06-1.72) 0.016* 1.05…(0.99-1.11)… 0.07 Adjusted…VORT…(10-4) 1.02…(0.88-1.12) 0.70 1.40…(0.85-2.30) 0.19 0.99…(0.87-1.14) 0.91 *Significant…predictor
Title:JJPTF 23- 総説 1 山縣 .indd p6 2021/02/27/ 土 10:35:43 Title:JJPTF 23- 総説 1 山縣 .indd p7 2021/02/27/ 土 10:35:43
6 )…Yamagata… M,… Falaki… A,… Latash… ML:… Effects… of… Voluntary… Agonist–Antagonist… Coactivation… on… Stability… of… Vertical… Posture. … Motor… Control… 23: 304–326,…2019
7 )…Scholz…JP,…Schöner…G:…The…uncontrolled…manifold… concept: … Identifying… control… variables… for… a… functional…task.…Exp…Brain…Res…126: 289–306,…1999 …8…)…Mattos…DJS,…Latash…ML,…Park…E,…Kuhl…J,…Scholz…JP:…
Unpredictable… elbow… joint… perturbation… during… reaching…results…in…multijoint…motor…equivalence.… J…Neurophysiol…106:…1424–1436,…2011
9 )…Hsu…WL,…Scholz…JP,…Schoner…G,…Jeka…JJ,…Kiemel… T: … Control… and… estimation… of… posture… during… quiet…stance…depends…on…multijoint…coordination.… J…Neurophysiol…97: 3024–3035,…2007…
10)…Rosenblatt… NJ,… Hurt… CP,… Latash… ML,… Grabiner… MD: … An… apparent… contradiction: … Increasing… variability… to… achieve… greater… precision? … Exp… Brain…Res…232: 403–413,…2014
11)…Verrel… J,… Lövdén… M,… Lindenberger… U:… Normal… aging…reduces…motor…synergies…in…manual…pointing.… Neurobiol…Aging…33:…201–210,…2012
12)…Hsu…WL,…Scholz…JP:…Motor…abundance…supports… multitasking… while… standing.… Hum… Mov… Sci… 31 (4):…844–62,…2012
13)…Krishnan…V,…Rosenblatt…NJ,…Latash…ML,…Grabiner… MD:… The… effects… of… age… on… stabilization… of… the… mediolateral… trajectory… of… the… swing… foot.… Gait… Posture…38: 923–928,…2013
14)…Kao… PC, … Srivastava… S: … Mediolateral… footpath… stabilization…during…walking…in…people…following… stroke.…PLoS…One…13: 1–17,…2018
15)…Yamagata…M,…Tateuchi…H,…Shimizu…I,…Ichihashi…N:… The…effects…of…fall…history…on…kinematic…synergy… during…walking.…J…Biomech…82:…204–210,…2018 16)…Yamagata… M,… Tateuchi… H,… Shimizu… I,… Saeki… J,…
Ichihashi…N:…The…relation…between…limb…segment… coordination… during… walking… and… fall… history… in… community- dwelling… older… adults. … J… Biomech… 93: 94–100,…2019
17)…Robinovitch…SN…Feldman…F,…Yang…Y,…Schonnop…R,… Leung…PM,…Sarraf…T,…Sims-Gould…J,…Loughin…M:… Video… capture… of… the… circumstances… of… falls… in… elderly… people… residing… in… long- term… care: … an… observational…study.…Lancet…381: 47–54,…2013 18)…O’Connor… SM, … Kuo… AD: … Direction- dependent…
control…of…balance…during…walking…and…standing.… J…Neurophysiol…102: 1411–1419,…2009
19)…Papi…E,…Rowe…PJ,…Pomeroy…VM:…Analysis…of…gait… within… the… uncontrolled… manifold… hypothesis:… Stabilisation…of…the…centre…of…mass…during…gait.…J… Biomech…48:…324–331,…2015
20)…Black…DP,…Smith…BA,…Wu…J,…Ulrich…BD:…Uncontrolled… manifold… analysis… of…segmental… angle… variability… during…walking:…Preadolescents…with…and…without… Down…syndrome.…Exp…Brain…Res…183:…511–521,…2007