社団法人 電子情報通信学会 信学技報
THE INSTITUTE OF ELECTRONICS, TECHNICAL REPORT OF IEICE
INFORMATION AND COMMUNICATION ENGINEERS
ネットワークロボットの実現に向けて
−ロボット情報流通のためのプラットフォームアーキテクチャの検討−
下倉 健一朗
†手塚 博久
‡片渕 典史
‡町野 保
‡南條 義人
‡岩城 敏
‡†NTTサイバーソリューション研究所 〒239-0847 神奈川県横須賀市光の丘 1-1
‡NTTサイバーソリューション研究所 〒180-8585 東京都武蔵野市 3-9-11
E-mail: †[email protected], ‡{tezuka.hirohisa, katafuchi.norifumi, machino.tamotsu, nanjo.yoshito,
iwaki.satoshi}@lab.ntt.co.jp
あらまし 本報告では,ネットワークロボットにおけるプラットフォームの役割を考察し,接続ユニット/エリア
管理ゲートウェイ/認証データベースの 3 階層から構成されるプラットフォームのコンセプトを提案する.また,フ
ィールド情報流通フォーマット FDML およびフィールド情報流通プラットフォーム FDC をベースにしたネットワ
ークロボットプラットフォームのプロトタイプを構築し,および人の状況に応じてサービスフローが起動できるこ
とを実験的検証した結果を示す.
キーワード ネットワークロボット,プラットフォーム,FDML
1. は じ め に
来 る べ き ユ ビ キ タ ス 社 会 に お い て は , ネ ッ ト ワ ー ク と ロ ボ ッ ト が 融 合 し た ネ ッ ト ワ ー ク ロ ボ ッ ト の 実 現 に よ る サ ー ビ ス の 創 出 が 期 待 さ れ て い る . 図 1 は 将 来 ネ ッ ト ワ ー ク ロ ボ ッ ト が 提 供 す る サ ー ビ ス を 一 例 と し て 示 し た も の で あ る .ネ ッ ト ワ ー ク ロ ボ ッ ト は ,(1)身 体 を 持 つ ビ ジ ブ ル 型 ,(2)環 境 に 埋 め 込 ま れ た ア ン コ ン シ ャ ス 型 ,(3)電 脳 空 間 に 存 在 す る バ ー チ ャ ル 型 に 分 類 さ れ る[ 1]. シ ョ ッ ピ ン グ モ ー ル 等 で も 多 く の ビ ジ ブ ル ロ ボ ッ ト が 存 在 し て お り , 周 辺 の 壁 や 天 井 に 埋 め 込 ま れ た セ ン サ は 画 像 や RF-ID タ グ 等 の 情 報 か ら 歩 行 者 の 行 動 を 推 定 す る ア ン コ ン シ ャ ス ロ ボ ッ ト と し て 機 能 す る . 加 え て ,携 帯 電 話 や PDA 等 に は バ ー チ ャ ル ロ ボ ッ ト が エ ー ジ ェ ン ト と し て 歩 行 者 に 様 々 な 情 報 を 提 供 す る . こ れ ら の ロ ボ ッ ト は 全 て ネ ッ ト ワ ー ク に 接 続 さ れ る こ と で , ビ ジ ブ ル , ア ン コ ン シ ャ ス な ら び に バ ー チ ャ ル ロ ボ ッ ト と し て 協 調 ・ 連 携 し て 動 作 す る こ と が 可 能 と な る . こ の よ う な 環 境 を 実 現 す る こ と に よ り , 行 き 先 の 分 か ら な く な っ た 歩 行 者 を ア ン コ ン シ ャ ス ロ ボ ッ ト が 発 見 し , ビ ジ ブ ル や バ ー チ ャ ル ロ ボ ッ ト が 行 き 先 ま で の 道 案 内 す る ,と い っ た サ ー ビ ス が 実 現 可 能 と な る . こ れ ま で に , 人 が 活 動 し て い る 周 囲 の 状 況 を 環 境 に 存 在 す る セ ン サ 群 を 用 い て 認 識 す る こ と で 人 を 支 援 し よ う と す る 研 究 は 進 め ら れ て お り , 例 え ば , 生 活 空 間 で あ る 部 屋 で 人 の 情 報 を 蓄 積 し 人 の 行 動 支 援 に 利 用 す る Robotic Room[ 2 ]や , 複 数 の 知 覚 エ ー ジ ェ ン ト か ら な る 全 方 位 カ メ ラ[ 3]な ど が 報 告 さ れ て い る . こ の よ う な 先 行 研 究 を ネ ッ ト ワ ー ク に つ な が っ た ア ン コ ン シ ャ ス 型 ロ ボ ッ ト と い う 観 点 で 見 る と 、 収 集 さ れ た 情 報 あ る い は 認 識 結 果 を 一 旦 蓄 積 し た 上 で 別 の 空 間 や 履 歴 と し て 別 の タ イ ミ ン グ で 再 利 用 す る と 言 っ た 点 で は , 十 分 な 吟 味 が さ れ て い な い の が 現 状 で あ る . 例 え ば 個 人 情 報 の 保 護 と い う 点 で は , 情 報 を 再 利 用 す る 際 に は , 情 報 が 当 人 あ る い は 指 定 さ れ た 者 に の み 利 用 可 能 で あ る よ う な 情 報 の 開 示 制 御 機 能 が 必 要 と な っ て く る . 一 方 , ビ ジ ブ ル 型 ロ ボ ッ ト に 関 す る 研 究 に つ い て は , 単 体 で 身 振 り や 音 声 を 使 っ て 道 案 内 や 商 品 案 内 な ど の サ ー ビ ス を 実 現 し た 例 は 存 在 す る . ま た , 携 帯 電 話 に 組 み 込 ま れ た エ ー ジ ェ ン ト に よ る 道 案 内 等 の サ ー ビ ス も 既 に 開 発 さ れ て い る . し か し な が ら , こ れ ら の ロ ボ ッ ト も ネ ッ ト ワ ー ク に つ な が る こ と で , 利 用 空 間 の 共 有 ,複 数 ロ ボ ッ ト に よ る 連 係 動 作 ,様 々 な 情 報 の 共 有 , 遠 隔 操 作 な ど が 同 時 に 実 現 可 能 に な る . 上 記 の よ う な 環 境 を 実 現 す る た め に は , サ ー ビ ス を ロ ボ ッ ト 単 体 で 提 供 す る 場 合 に 比 べ て , ネ ッ ト ワ ー ク 型 と し て 提 供 す る 場 合 の サ ー ビ ス 品 質 が 向 上 し な け れ ば な ら な い . そ の た め に は , ネ ッ ト ワ ー ク を 介 す る こ と で 従 来 は ロ ボ ッ ト 単 体 で は 持 ち 得 な か っ た 情 報 , ロ ボ ッ ト に 対 し て サ ー ビ ス を 受 け る 人 の 情 報 , ロ ボ ッ ト Unconscious type robot Visible type robot Virtual type robot 図 1 ネ ッ ト ワ ー ク ロ ボ ッ ト 社 会 の イ メ ー ジが 提 供 す べ き サ ー ビ ス の 情 報 , ロ ボ ッ ト の 周 囲 の 環 境 の 情 報 , 等 が リ ア ル タ イ ム で 提 供 さ れ る こ と が 必 要 と な る . ネ ッ ト ワ ー ク の 側 か ら 見 る と , 実 空 間 で 生 み 出 さ れ る コ ン テ ン ツ を 収 集 ・ 蓄 積 ・ 加 工 し て , 実 空 間 に 配 信 す る 情 報 流 通 環 境 を い か に 構 築 す る か , と い う 問 題 と 捉 え る こ と が で き る . 本 稿 で は , 筆 者 ら が 実 空 間 で の 情 報 流 通 を 目 的 に 開 発 し て き た フ ィ ー ル ド 情 報 流 通 プ ラ ッ ト フ ォ ー ム を ベ ー ス と し て , ネ ッ ト ワ ー ク ロ ボ ッ ト に お け る 情 報 流 通 環 境 に つ い て 検 討 し た 結 果 を 報 告 す る .
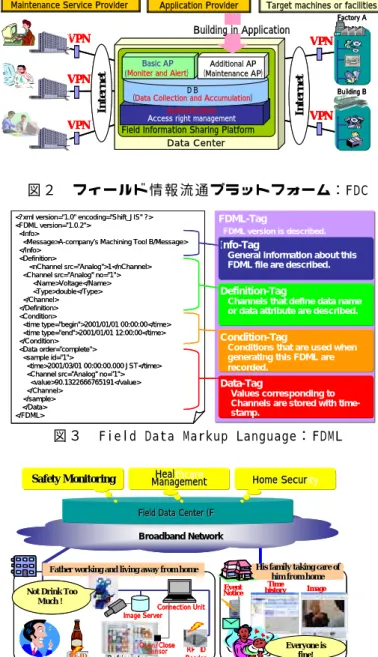
2. フ ィ ー ル ド 情 報 流 通 プ ラ ッ ト フ ォ ー ム (FDC)
筆 者 ら は こ れ ま で , 製 造 や 医 療 等 の 分 野 で 様 々 な 機 器 が 動 作 し そ の 中 で 人 が 活 動 し て い る 実 空 間 (フ ィ ー ル ド ) で の 情 報 流 通 を 可 能 と す る プ ラ ッ ト フ ォ ー ム (Field Data Center: FDC)を 開 発 し て き た[ 4 ]. フ ィ ー ル ド 情 報 流 通 プ ラ ッ ト フ ォ ー ム に お い て 実 現 す べ き 機 能 要 件 は , 製 造 分 野 を 例 に 取 る と , 以 下 の よ う に 整 理 で き る . • ネ ッ ト ワ ー ク に 接 続 さ れ る 機 器 に 依 存 せ ず ,様 々 な タ イ プ の デ ー タ を 統 一 的 に 扱 え ,蓄 積・流 通 さ せ る こ と が で き る . • 機 器 デ ー タ を 単 に 生 産 管 理 や 監 視 に 用 い る だ け で な く ,ア プ リ ケ ー シ ョ ン と 組 み 合 わ せ て 多 目 的 に 再 利 用 で き る . 図 2 に ,FDC の 機 能 概 要 を 示 す .FDC は ,認 証 や 課 金 等 の ASP 構 築 に 必 要 な 機 能 を は じ め と し て ,各 種 機 器 ( ロ ボ ッ ト , 工 作 機 械 , 医 療 機 器 , 家 電 製 品 ) や セ ン サ な ど か ら ネ ッ ト ワ ー ク 経 由 で 送 信 さ れ る デ ー タ を 受 信 し , 蓄 積 , 管 理 , 表 示 す る 機 能 を 有 し て い る . さ ら に , 例 え ば 製 造 現 場 に お い て は , 各 企 業 が 管 理 し て い る 生 産 情 報 等 の 重 要 な デ ー タ の 送 受 信 を 安 全 に 行 う た め IPSec 等 の セ キ ュ リ テ ィ 技 術 を 併 用 す る こ と が 可 能 な シ ス テ ム と な っ て い る . ま た , 各 種 機 器 情 報 を ネ ッ ト ワ ー ク 上 で 授 受 す る プ ロ ト コ ル お よ び フ ォ ー マ ッ ト が ベ ン ダ ご と に 異 な り 統 一 さ れ て い な い 問 題 を 解 決 す る た め に , 情 報 流 通 フ ォ ー マ ッ ト と し て FDML (Field Data Markup Language)を 開 発 し た . FDML は , 以 下 の 四 つ の 特 徴 を 有 す る XML ベ ー ス の デ ー タ フ ォ ー マ ッ ト で あ る . • デ ー タ の 時 間 カ プ セ ル 化 • 物 理 的 チ ャ ネ ル と 論 理 的 チ ャ ネ ル の 分 離 • 論 理 的 チ ャ ネ ル の プ ロ パ テ ィ 定 義 • シ ン プ ル な タ グ 定 義 に よ り ,ロ ー ス ペ ッ ク 機 器 で も パ ー シ ン グ 処 理 が 可 能 FDML の 基 本 構 造 を 図 3 に 示 す . FDML の 主 要 な タ グ と し て は , 情 報 の 収 集 対 象 と な る 機 器 情 報 を 記 述 す る Info タ グ ,実 フ ィ ー ル ド で の 物 理 的 チ ャ ネ ル と 計 測 結 果 情 報 を 管 理 す る 論 理 的 チ ャ ネ ル の 関 係 を 記 述 す る Definition タ グ , 情 報 の 取 得 ・ 送 信 条 件 を 記 述 す る Condition タ グ ,当 該 取 得 デ ー タ の 時 系 列 値 を 時 刻 情 報 と 対 応 づ け て 記 述 す る Data タ グ が あ る . こ の よ う に セ ン サ 情 報 な ど の 時 系 列 デ ー タ を 拡 張 子 が .fdml の フ ァ イ ル 形 式 に 変 換 す る こ と で ,異 な る タ イ プ の 情 報 の 関 係 も 統 一 的 に 扱 う こ と が 可 能 と な る . こ こ ま で , 機 械 (セ ン サ )の 挙 動 を モ ニ タ リ ン グ す る 用 途 を 例 に FDC と FDML の 特 長 に つ い て 説 明 し て き た が ,FDC は ,収 集・蓄 積 さ れ た 情 報 の 内 容 に 応 じ て 提 示 方 法 を プ ロ グ ラ マ ブ ル に 可 変 で き る 機 能 を 有 し て い る . こ の 機 能 を 活 用 す る こ と で , フ ィ ー ル ド で 活 動 す る 人 に 対 し て , 状 況 に 応 じ て 様 々 な 情 報 を 提 供 し , 支 援 す る こ と も 可 能 で あ る . 図 4 は 、家 庭 な ど 生 活 居 In te rn et VPNMaintenance Service Provider Application Provider Target machines or facilities
Authentication
Access right management
Data Center Field Information Sharing Platform
DB
(Data Collection and Accumulation)
Basic AP (Moniter and Alert)
Additional AP (Maintenance AP) Building in Application Building B Factory A VPN VPN VPN VPN In te rn et In te rn et VPN VPN
Maintenance Service Provider Application Provider Target machines or facilities
Authentication
Access right management
Data Center Field Information Sharing Platform
DB
(Data Collection and Accumulation)
Basic AP (Moniter and Alert)
Basic AP (Moniter and Alert)
Additional AP (Maintenance AP) Additional AP (Maintenance AP) Building in Application Building B Factory A VPN VPN VPN VPN VPN VPN VPN VPN In te rn et
Field Data Center (FDC)
Field Data Center (FDC) Broadband Network
Broadband Network
Father working and living away from home
Father working and living away from home Not Drink Too
Much!
His family taking care of
His family taking care of
him from home
him from home
RF-ID
Everyone is fine!
Safety Monitoring
Safety Monitoring ManagementManagementHealthcareHeal Home SecurHome Security
Event Notice Time history Image Image Server RF- ID Reader Open/Close Sensor Connection Unit Refrigerator
Field Data Center (F
Field Data Center (F Broadband Network
Broadband Network
Father working and living away from home
Father working and living away from home Not Drink Too
Much!
His family taking care of
His family taking care of
him from home
him from home
RF-ID RF-ID RF-ID Everyone is fine! Safety Monitoring
Safety Monitoring ManagementManagementHealthcareHeal Home SecurHome Security
Event Notice Time history Image Image Server RF- ID Reader Open/Close Sensor Connection Unit Refrigerator 図 2 フ ィ ー ル ド 情 報 流 通 プ ラ ッ ト フ ォ ー ム:FDC 図 4 生 活 環 境 に お け る 見 守 り ・ 健 康 管 理 支 援 <?xml version="1.0" encoding="Shift_JIS" ?> <FDML version="1.0.2"> <Info>
<Message>A-company’s Machining Tool B/Message> </Info>
<Definition>
<nChannel src="Analog">1</nChannel> <Channel src="Analog" no="1">
<Name>Voltage</Name> <Type>double</Type> </Channel> </Definition> <Condition>
<time type="begin">2001/01/01 00:00:00</time> <time type="end">2001/01/01 12:00:00</time> </Condition>
<Data order=“complete"> <sample id="1">
<time>2001/03/01 00:00:00.000 JST</time> <Channel src="Analog" no="1">
<value>90.1322666765191</value> </Channel> </sample> </Data> </FDML> FDML-Tag FDML version is described. FDML-Tag FDML version is described. Data-Tag Values corresponding to Channels are stored with time-stamp.
Condition-Tag
Conditions that are used when generating this FDML are recorded.
Info-Tag
General information about this FDML file are described.
Definition-Tag
Channels that define data name or data attribute are described.
<?xml version="1.0" encoding="Shift_JIS" ?> <FDML version="1.0.2">
<Info>
<Message>A-company’s Machining Tool B/Message> </Info>
<Definition>
<nChannel src="Analog">1</nChannel> <Channel src="Analog" no="1">
<Name>Voltage</Name> <Type>double</Type> </Channel> </Definition> <Condition>
<time type="begin">2001/01/01 00:00:00</time> <time type="end">2001/01/01 12:00:00</time> </Condition>
<Data order=“complete"> <sample id="1">
<time>2001/03/01 00:00:00.000 JST</time> <Channel src="Analog" no="1">
<value>90.1322666765191</value> </Channel> </sample> </Data> </FDML> FDML-Tag FDML version is described. FDML-Tag FDML version is described. Data-Tag Values corresponding to Channels are stored with time-stamp.
Condition-Tag
Conditions that are used when generating this FDML are recorded.
Info-Tag
General information about this FDML file are described.
Definition-Tag
Channels that define data name or data attribute are described.
FDML Adapter Translation to FDML Command Robot Network robot PF Connection unit Product dependent part
Conversion from sensing information to common status expression
Command translation
Conversion from common command to robot peculiar command
Product independent part
住 環 境 を 想 定 し た 見 守 り ・ 健 康 管 理 支 援 へ の 適 用 例 を 示 し て い る[ 5] [ 6].こ の 例 で は 取 り 出 し た 飲 料 の ID に 応 じ て 利 用 者 に 対 し て 異 な る メ ッ セ ー ジ が メ ー ル 読 み 上 げ ロ ボ ッ ト か ら 発 せ ら れ る .
3. ネ ッ ト ワ ー ク ロ ボ ッ ト 用 プ ラ ッ ト フ ォ ー ム
本 章 で は ,2 章 で 述 べ た よ う な FDC に よ る フ ィ ー ル ド 情 報 流 通 の フ レ ー ム ワ ー ク を 用 い て , ネ ッ ト ワ ー ク ロ ボ ッ ト で 必 要 と な る プ ラ ッ ト フ ォ ー ム の 要 件 に つ い て 検 討 し た 結 果 を 示 す .3.1. コンセプト
FDC を 発 展 さ せ た ネ ッ ト ワ ー ク ロ ボ ッ ト 用 プ ラ ッ ト フ ォ ー ム の 構 想 を 以 下 に 述 べ る . 図 5 は NWR プ ラ ッ ト フ ォ ー ム の 構 成 イ メ ー ジ で あ る .NWR 用 プ ラ ッ ト フ ォ ー ム は , (1)認 証 デ ー タ ベ ー ス ,(2) エ リ ア 管 理 ゲ ー ト ウ ェ イ , (3) 接 続 ユ ニ ッ ト , の 3 階 層 か ら 成 る . 接 続 ユ ニ ッ ト は ロ ボ ッ ト や 利 用 者 の 状 態 を 統 一 デ ー タ フ ォ ー マ ッ ト FDML に 変 換 し ,エ リ ア 管 理 ゲ ー ト ウ ェ イ を 介 し て 認 証 デ ー タ ベ ー ス に ア ッ プ ロ ー ド す る . 認 証 デ ー タ ベ ー ス は , FDML の 形 式 で ア ッ プ ロ ー ド さ れ た 情 報 を ロ ボ ッ ト , 利 用 者 , サ ー ビ ス に 分 類 し て DB に 登 録 し , 長 期 保 存 を 可 能 と す る . そ し て , こ れ ら を 基 に , ユ ー ザ に 適 し た サ ー ビ ス を 選 択 す る . エ リ ア 管 理 ゲ ー ト ウ ェ イ は , 自 身 が 管 理 す る エ リ ア に あ る ロ ボ ッ ト の 状 態 を , ア ッ プ ロ ー ド さ れ る FDML か ら 検 知 し , 選 択 さ れ た サ ー ビ ス を 遂 行 す る の に 最 も 適 し た ロ ボ ッ ト を 選 択 し , ロ ボ ッ ト に 対 し て サ ー ビ ス 実 行 命 令 を 発 す る . こ の よ う に ロ ボ ッ ト と プ ラ ッ ト フ ォ ー ム と の 間 に 第 二 階 層 を 設 け る こ と で , 緊 急 時 ・ 異 常 発 生 時 等 の 迅 速 な 対 応 を 可 能 と す る . 以 上 述 べ て き た よ う に , 情 報 流 通 プ ラ ッ ト フ ォ ー ム を 階 層 化 し , ロ ボ ッ ト 情 報 , 利 用 者 情 報 , サ ー ビ ス 情 報 等 を イ ン ダ イ レ ク ト 型 コ ミ ュ ニ ケ ー シ ョ ン の コ ン テ ン ツ と 捉 え て 流 通 ・ 蓄 積 さ せ る こ と が , ネ ッ ト ワ ー ク ロ ボ ッ ト の た め の 共 通 基 盤 技 術 に な り 得 る と 考 え て い る .3.2. システム構 成
前 節 で 述 べ た コ ン セ プ ト を 元 に , ネ ッ ト ワ ー ク ロ ボ ッ ト プ ラ ッ ト フ ォ ー ム を 開 発 し た の で , そ れ ぞ れ の 機 能 の 詳 細 や 仕 様 に つ い て 述 べ る . 接 続 ユ ニ ッ ト の 模 擬 図 を 図 6 に 示 す . 接 続 ユ ニ ッ ト の 主 た る 機 能 は 以 下 の 2 点 で あ る . 1. 機 器 依 存 情 報 を プ ラ ッ ト フ ォ ー ム で 扱 え る 共 通 表 現 に 変 換 し , プ ラ ッ ト フ ォ ー ム へ 送 信 2. プ ラ ッ ト フ ォ ー ム か ら 送 信 さ れ る 共 通 コ マ ン ド を , 機 器 固 有 コ マ ン ド へ と 変 換 し , ロ ボ ッ ト へ 送 信 1.に つ い て ア ン コ ン シ ャ ス ロ ボ ッ ト を 例 に 少 し 詳 し く 述 べ る . プ ラ ッ ト フ ォ ー ム に 接 続 す る ロ ボ ッ ト の 種 類 は 千 差 万 別 で あ る . そ し て , 機 種 ご と に 異 な る フ ォ ー マ ッ ト や 性 能 を 全 て プ ラ ッ ト フ ォ ー ム 側 で 管 理 す る と な る と , 接 続 す る ロ ボ ッ ト の 数 が 増 大 し て い く と い ず れ は プ ラ ッ ト フ ォ ー ム 側 の 処 理 及 び 管 理 能 力 を 超 え る こ と が 予 想 さ れ る . そ こ で , ロ ボ ッ ト か ら プ ラ ッ ト フ ォ ー ム に 送 信 す る 情 報 に つ い て , プ ラ ッ ト フ ォ ー ム 側 で 管 理 で き る 情 報 の 種 類 と フ ォ ー マ ッ ト に つ い て 共 通 化 す る こ と を 考 え る . す な わ ち 情 報 の 種 類 に つ い て は ,4W( When,Where,Who,What)に 集 約 し ,か つ FDML フ ォ ー マ ッ ト で 送 信 す る も の と す る . ”Where”を 例 に 述 べ る と , プ ラ ッ ト フ ォ ー ム 側 で は ロ ボ ッ ト や 利 用 者 の 情 報 は 3 次 元 で 規 定 さ れ た あ る 世 界 座 標 系 で 取 り 扱 う も の と ま ず 決 め る . し た が っ て , 接 続 ユ ニ ッ ト に 接 続 さ れ た ア ン コ ン シ ャ ス ロ ボ ッ ト が ど の よ う な 感 覚 器 に 対 応 し た ロ ボ ッ ト で あ っ て も ( カ メ ラ : 視 覚 , 圧 力 セ ン サ : 触 覚 ), 規 定 さ れ た 座 標 系 で ”Where”の 情 報 が 送 信 さ れ る 限 り , 同 一 種 の ア ン コ ン シ ャ ス ロ ボ ッ ト で あ る と み な す こ と が で き る . こ の よ う に , プ ラ ッ ト フ ォ ー ム に 対 応 し た 出 力 を 送 信 す る こ と の で き る , ア ン コ ン シ ャ ス ロ ボ ッ ト と 接 続 ユ ニ ッ ト の 組 み 合 わ せ を , Vendor unique Common Interface Vendor unique Common InterfaceVisible type robot Visible type robot
Unconscious type robot
FDML FDML FDML FDML FDML Robot-user interaction DB Service DB User DB Robot DB User Area management Gateway Connection Unit Log DB Dispatch action to the robot Upload status Applications Connection
Unit ConnectionUnit
User Area management Gateway Download action Vendor unique Common Interface Vendor unique Common Interface Vendor unique Common Interface Vendor unique Common Interface 図 5 ネ ッ ト ワ ー ク ロ ボ ッ ト プ ラ ッ ト フ ォ ー ム 図 6 接 続 ユ ニ ッ ト
「 論 理 セ ン サ 」 と 称 す る . 表 1 に 認 証 デ ー タ ベ ー ス に 登 録 さ れ て い る 利 用 者 , ロ ボ ッ ト に 関 す る 情 報 を 、 表 2 に サ ー ビ ス フ ロ ー に 関 す る 情 報 を 示 す . 利 用 者 デ ー タ ベ ー ス と ロ ボ ッ ト デ ー タ ベ ー ス に は ,利 用 者 や ロ ボ ッ ト に 関 す る 情 報 と し て , 静 的 な 情 報 ( 名 前 , 所 有 す る タ グ の ID 等 ),動 的 な 情 報 ( サ ー ビ ス の 提 供 状 況 , 現 在 位 置 等 ) が 登 録 さ れ て い る . ま た デ ー タ ベ ー ス へ の ア ク セ ス イ ン タ フ ェ ー ス と し て は ,外 部 AP か ら の ア ク セ ス も 視 野 に 入 れ ,HTTP を 採 用 し た . 次 に サ ー ビ ス フ ロ ー デ ー タ ベ ー ス の 扱 う 情 報 で あ る が , サ ー ビ ス フ ロ ー と は , サ ー ビ ス を シ ー ケ ン ス 記 述 し た も の で あ り , イ ベ ン ト に 従 っ て 各 ロ ボ ッ ト が ど の よ う な 状 態 か ら ど の よ う な 状 態 に 変 化 す る か を 記 述 し た 状 態 遷 移 モ デ ル の こ と で あ る . エ リ ア 管 理 ゲ ー ト ウ ェ イ は , リ ソ ー ス ( ロ ボ ッ ト ) に 対 し て , 選 択 し た サ ー ビ ス フ ロ ー に 記 述 さ れ た サ ー ビ ス 状 態 遷 移 モ デ ル に 基 づ き , 逐 次 サ ー ビ ス を 実 行 す る .
3.3. サービスフロー起 動 実 験
こ こ で は 、 ロ ボ ッ ト 連 携 に よ る サ ー ビ ス の 中 で , ま ず ビ ジ ブ ル 型 と ア ン コ ン シ ャ ス 型 に 着 目 し , こ れ ら の 連 携 に つ い て の 検 討 を 行 っ た . ま ず , ビ ジ ブ ル 型 の 特 徴 は , 身 体 性 を 有 し か つ 移 動 能 力 を 有 し て い る こ と で あ る . そ の た め ビ ジ ブ ル 型 は , 特 に 物 理 的 に 人 と イ ン サービスフ ロー実行AP が変更する 未提供 サービスフ ロー提供状態 FDMLデータ (105, 58, -) 利用者位置 (-, -, 50) [度] エリア入室 10 12345678 通研太郎 0001 例 FDMLデータ マスタ情報 マスタ 情報 マスタ情報 マスタ情報 マスタ情報 備考 利用者姿勢 サービスフ ロー起動イ ベント サービ スフ ローID タグID 利用者名 利用者ID サービスフ ロー実行AP が変更する 未提供 サービスフ ロー提供状態 FDMLデータ (105, 58, -) 利用者位置 (-, -, 50) [度] エリア入室 10 12345678 通研太郎 0001 例 FDMLデータ マスタ情報 マスタ 情報 マスタ情報 マスタ情報 マスタ情報 備考 利用者姿勢 サービスフ ロー起動イ ベント サービ スフ ローID タグID 利用者名 利用者ID• 利用者DB
‒ 利用者情報テーブル
・ロボットDB
– ロボット情報テーブル
FDMLデータ idle 状態 FDMLデータ (100, 25, -) ロボット位置 (-, -, 15) [度] 移動可能 回転可能 発話可能 23456789 RobovieA R0001 例 マスタ情報 ロボット保有能力 FDMLデータ マスタ情報 マスタ情報 マスタ情報 備考 ロボット姿勢 タグID ロボット名 ロボットID FDMLデータ idle 状態 FDMLデータ (100, 25, -) ロボット位置 (-, -, 15) [度] 移動可能 回転可能 発話可能 23456789 RobovieA R0001 例 マスタ情報 ロボット保有能力 FDMLデータ マスタ情報 マスタ情報 マスタ情報 備考 ロボット姿勢 タグID ロボット名 ロボットID• サービスフローDB
‒ サービスフロー情報テーブル(マスタ情報)
‒ サービスフロー実行状態遷移情報テーブル(マスタ情報)
発話可能 移動可能 移動可能 発話可能 サービスフロー実行に 必要なロボット保有能 力 103 102 101 サービスフローID 100 サービスフ ロー分類 例 10 近寄り発話 5 近寄り 2 サービスフ ローグレード 発話 詳細サービスフ ロー名 発話可能 移動可能 移動可能 発話可能 サービスフロー実行に 必要なロボット保有能 力 103 102 101 サービスフローID 100 サービスフ ロー分類 例 10 近寄り発話 5 近寄り 2 サービスフ ローグレード 発話 詳細サービスフ ロー名 101 サービスフロー ID 4 3 2 1 I D 例 発話終了 発話中 待機 待機中 待機中 待機 待機中 移動中 発話中 人の退室 発話中 停止・発話 移動中 人とロボットの距離が近 い 移動中 人に近づく 待機中 人の入室 遷移後の状態 サービス(アクショ ン) 現在の状 態 イベント 101 サービスフロー ID 4 3 2 1 I D 例 発話終了 発話中 待機 待機中 待機中 待機 待機中 移動中 発話中 人の退室 発話中 停止・発話 移動中 人とロボットの距離が近 い 移動中 人に近づく 待機中 人の入室 遷移後の状態 サービス(アクショ ン) 現在の状 態 イベント 表 1 認 証 DB の 構 成 例 (利 用 者 ・ ロ ボ ッ ト DB) 表 2 認 証 DB の 構 成 例 (サ ー ビ ス フ ロ ー DB)タ ラ ク シ ョ ン を 行 う こ と が 可 能 で あ る . 一 方 ア ン コ ン シ ャ ス 型 の 特 徴 は , 人 に 一 見 し て ロ ボ ッ ト と 認 識 さ れ な い こ と で あ り , そ れ ゆ え 用 途 と し て は 主 に 人 の 状 態 を 認 識 す る こ と が 可 能 で あ る . そ こ で ビ ジ ブ ル 型 と ア ン コ ン シ ャ ス 型 の 連 携 は , ア ン コ ン シ ャ ス 型 の 認 識 結 果 を 元 に , ビ ジ ブ ル 型 に 特 定 の ア ク シ ョ ン を 起 こ さ せ る と い う フ ロ ー が 一 般 的 で あ る と 考 え ら れ る . そ こ で , ネ ッ ト ワ ー ク ロ ボ ッ ト プ ラ ッ ト フ ォ ー ム を 用 い て , ア ン コ ン シ ャ ス 型 と ビ ジ ブ ル 型 と を 連 携 さ せ た 実 験 系 を 構 築 し た . 実 験 シ ス テ ム の 構 成 を 図 7 に 示 す . ビ ジ ブ ル 型 と し て Robovie-RII を ,ア ン コ ン シ ャ ス 型 と し て RFID タ グ リ ー ダ と カ メ ラ を 使 用 し た .ま た , 利 用 者 と ロ ボ ッ ト に は マ ー カ を 装 着 し , 画 像 処 理 に よ り 利 用 者 と ロ ボ ッ ト の 位 置 ・ 方 向 を カ メ ラ 座 標 で 検 出 す る も の と す る . 本 実 験 系 で は , 人 が あ る エ リ ア に 入 っ て き た こ と を ア ン コ ン シ ャ ス 型 ロ ボ ッ ト が 検 知 し , 検 知 し た こ と を ト リ ガ ー と し て 挨 拶 サ ー ビ ス フ ロ ー が 起 動 し , ビ ジ ブ ル 型 ロ ボ ッ ト が 人 に 接 近 し て 挨 拶 を 行 う と い う , 一 連 の 処 理 の 実 行 を 試 み た . 1. タ グ に よ る 利 用 者 の 入 室 の 検 知 利 用 者 と ロ ボ ッ ト の 状 態 を FDML 化 し ,プ ラ ッ ト フ ォ ー ム へ ア ッ プ ロ ー ド ( 接 続 ユ ニ ッ ト ) 2. 利 用 者 に 対 し て 実 行 す べ き サ ー ビ ス フ ロ ー の 検 索 ( サ ー ビ ス フ ロ ー 実 行 AP) 3. ロ ボ ッ ト リ ソ ー ス の 検 索 ( サ ー ビ ス フ ロ ー 実 行 AP) Unconscious-type robot: RF-ID tag reader
CCD camera
Audio (stereo)
NTSC Video
User with RF-ID tag and marker
FDC DB server
Visible-type robot: Robovie with marker
Network Robot PF/AP Switching hub Speaker Unconscious-type robot: PC with speaker Et he rn et Ethernet Ethernet Ethernet Ethernet Ethernet Connection unit Eth er n et Unconscious-type robot:
Position measurement server by image
Real world
Robot
platform
Where
What
Who
When
図 7 実 験 シ ス テ ム の 概 要 図 9 挨 拶 サ ー ビ ス フ ロ ー 実 験 の 模 様 図 8 動 作 ロ グ4. 実 行 サ ー ビ ス フ ロ ー の 特 定( サ ー ビ ス フ ロ ー 実 行 AP) 5. 挨 拶 サ ー ビ ス フ ロ ー の 実 行( サ ー ビ ス フ ロ ー 実 行 AP) 6. 挨 拶 サ ー ビ ス に 係 る 個 々 の サ ー ビ ス の 実 行( サ ー ビ ス フ ロ ー 実 行 AP) 図 8 に , 認 証 デ ー タ ベ ー ス に 蓄 積 さ れ た , ロ ボ ッ ト の 状 態 表 現( 共 通 )を 示 す .4 つ の W に 集 約 さ れ て い る こ と が 確 認 さ れ る . ま た 図 9 に , 1-7 ま で の 一 連 の 処 理 を 行 っ た 際 の 利 用 者 と ロ ボ ッ ト の 動 作 を 示 す . 一 連 の フ ロ ー ( タ グ に よ る 人 の 入 室 か ら ビ ジ ブ ル ロ ボ ッ ト の 動 作 開 始 ま で ) の 時 間 は , 5.3 秒 で あ っ た ( 10 回 計 測 の 平 均 値 ).
4. ま と め
様 々 な ロ ボ ッ ト を 連 携 さ せ る こ と の で き る ネ ッ ト ワ ー ク ロ ボ ッ ト プ ラ ッ ト フ ォ ー ム に つ い て , 3 階 層 か ら な る コ ン セ プ ト モ デ ル を 提 案 し た . ま た , 3 階 層 の う ち 接 続 ユ ニ ッ ト と 認 証 デ ー タ ベ ー ス を 開 発・実 装 し , 人 や ロ ボ ッ ト の 検 知 か ら ビ ジ ブ ル ロ ボ ッ ト の 動 作 に 至 る 一 連 の 情 報 フ ロ ー を 実 現 で き る こ と を 確 認 し た . 謝 辞 本 研 究 の 一 部 は ,平 成 16 年 度 総 務 省 委 託 研 究「 ネ ッ ト ワ ー ク ・ ヒ ュ ー マ ン ・ イ ン タ フ ェ ー ス の 総 合 的 な 研 究 開 発( ネ ッ ト ワ ー ク ロ ボ ッ ト 技 術 )」の 一 環 と し て 行 な わ れ た .文 献
[1] 日 本 発 新 IT「 ネ ッ ト ワ ー ク・ロ ボ ッ ト 」の 実 現 に 向 け て ,総 務 省 ネ ッ ト ワ ー ク・ロ ボ ッ ト 技 術 に 関 す る 調 査 研 究 会 ,2003[2] T. Sato, et at. “Robotic Room: Symbiosis with human through behavior media”, Robotics and Autonomous Systems 18 International Workshop on Biorobotics: Human-Robot Symbiosis, ELSEVIER, pp.185-194, 1996.
[3] H. Ishiguro, “Development of low-cost compact omnidirectional vision sensors and their applications”, International Conference on Information systems, analysis synthesis, pp. 433-439, 1998. [4] 中 山 他 , “ 製 造 業 向 け 情 報 流 通 プ ラ ッ ト フ ォ ー ム と そ の 応 用( 遠 隔 監 視 ・ リ モ ー ト エ ン ジ ニ ア リ ン グ ) ”, 平 成 15 年 度 電 気 学 会 産 業 応 用 部 門 大 会 , 2003 [5] 手 塚 他 , FDML を 用 い た 情 報 流 通 プ ラ ッ ト フ ォ ー ム と 行 動 認 識 へ の 適 用 , 日 本 機 会 学 会 ロ ボ テ ィ ク ス メ カ ト ロ ニ ク ス 講 演 会 , 2004. [6] 片 渕 他 , RF-ID と セ ン サ 情 報 を 統 合 す る ユ ビ キ タ ス サ ー ビ ス プ ラ ッ ト フ ォ ー ム の 検 討 , 画 像 電 子 学 会 第 14 回 VMA 研 究 会 , 2005.