脳卒中片麻痺患者における感覚情報の違いが
静的バランス,機能障害に及ぼす影響
Relationships between Adaptation to Various Sensory Inputs on Static Standing
Balance and Impairments of Patients with Post-stroke Hemiplegia
大河原 七生
1,2)臼田 滋
2)NANAMI OKAWARA1,2), SHIGERU USUDA2)
1) Public Nanokaichi Hospital: 643, Nanokaichi, Tomioka, Gunma 370-2343, Japan. TEL+81 274-62-5100
E-mail: [email protected]
2) Gunma University Graduate School of Health Sciences
Rigakuryoho Kagaku 30(3): 345–352, 2015. Submitted Oct. 31, 2014. Accepted Dec. 25, 2014.
ABSTRACT: [Purpose] To investigate relationships between adaptation to various sensory inputs and impairments
of patients with post-stroke hemiplegia by measuring postural sway. [Subjects and Methods] Twenty-five patients with post-stroke hemiplegia participated in this study. Postural sway while standing was measured by posturography under eight standing conditions (visual conditions: eyes open or eyes closed; surface conditions: firm floor, foam rubber, and foam rubber under the affected and sound sides) for 30 sec each. The associations between dependence on visual input and the support surface ratio and standardized clinical measures of balance, gait ability and quantified somatosensory disturbances (touch, vibration) were examined. [Results] Dependence on the support surface ratio increased under the eyes-closed and foam rubber conditions. Dependence on visual input and the support surface ratio showed little correlation with standing balance, gait ability score, or superficial sensory disturbance of the affected side under most conditions. [Conclusion] Patients with hemiplegia show a reduced ability to adapt to the support surface condition of the sound side.
Key words: hemiplegia, static balance, adaptation to supporting surface
要旨:〔目的〕脳卒中片麻痺患者における感覚情報の違いに対する適応と機能障害との関連性を検討することとした. 〔対象〕脳卒中片麻痺患者25名とした.〔方法〕閉眼やフォームラバーを使用した軟らかい支持面上での立位保持と, 麻痺側あるいは非麻痺側の一側のみをフォームラバーとした全8条件での立位保持の可否と,その際の圧中心軌跡を 計測した.また,視覚や支持面への依存率と機能障害との関連性を検討した.〔結果〕視覚情報や両側の支持面が変 化した際に支持面への依存率が大きくなった.また,視覚および支持面への依存率と機能障害との関連性はほとんど 認められなかった.〔結語〕脳卒中片麻痺患者は,非麻痺側支持面情報への適応性が低下している可能性がある. キーワード:脳卒中片麻痺患者,立位バランス,支持面への適応 1) 公立七日市病院 : 群馬県富岡市七日市 643(〒 370-2343)TEL 0274-62-5100 2) 群馬大学大学院 保健学研究科 受付日 2014 年 10 月 31 日 受理日 2014 年 12 月 25 日
I.はじめに
脳卒中片麻痺者にとって,立位における下肢の荷重分 布はバランスをコントロールするための重要な要因であ る.非麻痺側下肢の優位な使用は,麻痺側下肢の使用機 会を減少させることが報告されている1).脳卒中片麻痺 者は静的立位姿勢で麻痺側よりも非麻痺側下肢に重心が 変位していることが多く1-4),非対称な立位姿勢は,麻 痺側下肢への重心移動能力の低下や5),時間的,空間的 な歩行の非対称性と関係があると報告されている3,12). 麻痺側下肢をより多く使用することが可能になれば,対 称的な立位姿勢の獲得を期待できることから3),立位で の非対称性の改善は,日常生活活動や歩行能力にも影響 を与えうる. 我々は常に変化する環境の下で生活しており,その中 で安定した姿勢を保つため,視覚,体性感覚,前庭覚か らの感覚情報は重要な側面を占める7).ある感覚が身体 位置を最適な情報あるいは正確な情報として提供できな い環境では,その感覚の重みづけは減少し,他の感覚へ の重みづけが増加する.しかし,適切な感覚の組織化や 感覚情報の選択ができない対象では,ある感覚が障害さ れ不安定な状態になっても,その感覚に頼り続けるため, 環境に適応できない7,8).姿勢制御に関する感覚の相対 的重要性を修正する能力をもつことで,変化に富む環境 の下で安定性を保つことができる9). 我々は脳卒中片麻痺患者に対して閉眼やフォームラ バーを用いることで,視覚や下肢体性感覚情報を操作し た際の静的立位保持能力と機能障害,動的立位バランス, 歩行能力との関連性について報告した10).下肢の表在, 深部感覚障害の程度や動的立位バランス,歩行能力は閉 眼やフォームラバーを用いて感覚情報を操作した静的立 位バランス能力との関連性が認められ,脳卒中片麻痺患 者は支持面の変化に適応した適切な感覚の選択や代償機 能が低下している可能性が示唆された10).脳卒中片麻 痺者のバランス障害の要因には,筋力低下,非対称な筋 緊張,感覚障害などの身体機能障害や6),立位姿勢制御 を視覚に依存している点が指摘されているが1,2),バラ ンス障害の要素として,開眼と閉眼,支持面条件を操作 するような方法を用いて,対象者の感覚情報の違いに対 する適応を評価することは重要である.また,脳卒中片 麻痺患者のように一側のみの障害の場合,麻痺側と非麻 痺側での感覚情報の違いに対する適応能力が異なる可能 性が高い.特に感覚障害などの機能障害を有する麻痺側 下肢ではその能力が低下していることが考えられ,安定 した立位保持のために非麻痺側下肢からの支持面情報に 依存している可能性がある. Shumway-Cookら9)は,利用可能な感覚を意図的に 操作した際の立位姿勢制御能力を評価するためにTheclinical test of sensory interaction in balance(CTSIB)を
開発した.CTSIBは全6条件で構成されており,硬い 支持面とフォームラバーを用いた軟らかい支持面上での 立位保持を開眼,閉眼,ランタンを顔に被った条件で実 施し,各条件における30秒間の立位姿勢の動揺を評価 するものである.CTSIBの評価において,開眼よりも 閉眼で動揺が大きくなる対象は姿勢制御において視覚情 報に依存しており,硬い支持面よりもフォームラバー上 での立位で動揺が大きくなる対象は体性感覚情報に依存 しているなど,各対象者の立位姿勢制御における感覚情 報の組織化や選択に関する評価が可能である9). 静的な立位姿勢制御の評価は身体動揺の程度を圧中心 (COP; center of pressure)により測定する方法が一般的 である11).Genthonらは2枚のフォースプレートを使 用して脳卒中片麻痺者の立位姿勢を測定し,COPが非 麻痺側に平均25.6 mm変位していたことを報告してい る12).一方で,脳卒中片麻痺者の立位姿勢や歩行の対 称性については,個々の対象で変動性があり6),フォー スプレートを使用した脳卒中片麻痺者の姿勢の非対称性 に関する報告は多いが,片麻痺者特有の一側のみの身体 機能障害を考慮した環境や支持面への適応能力に関する ものは少ない. 本研究の目的は,脳卒中片麻痺患者を対象として,閉 眼やフォームラバーを使用した軟らかい支持面上での立 位バランス評価に加え,麻痺側あるいは非麻痺側の一側 のみをフォームラバーとした支持面上での立位保持を開 眼,閉眼で実施し,視覚および支持面への依存率や,そ の結果と身体機能障害や歩行能力との関連性を検討する ことで,片麻痺者特有の立位姿勢制御や支持面への適応 を検討することである.
II.対象と方法
1.対象 対象は日高病院回復期リハビリテーション病棟に入院 中の脳卒中片麻痺患者25名とした.取り込み基準は上 肢支持なしでの立位保持が15秒以上可能であり,測定 に支障をきたさない十分な持久性がある者とした.除外 基準は研究参加への同意が得られない者,認知症や失語 症などの高次脳機能障害により,口答での回答と質問や 指示の理解が困難な者とした. 2.方法 基本属性として対象者の性別,年齢の記録に加えて, 疾患名,罹患期間の記録,麻痺側下肢のBrunnstromrecovery stage(Br.stage)12),バランスおよび歩行能力 の指標として,Berg balance scale(BBS)13),Timed up
and go test(TUG)14) と,Functional ambulation
category(FAC)15)を測定した.FACは不整地での歩行 や階段昇降などを含めた歩行能力の自立度を,歩行不能
あるいは全介助の0から,いかなる場所でも歩行が自立 している5までの6段階で評価する指標である15).
触覚閾値に対する感覚検査には,定量的な評価指標と してSemmes-Weinstein Monofilaments(SWM; North Coast Medical社製,800-821-9319)を用いた.SWM の測定部位は両足底の拇趾,拇趾球,小趾球,踵の4か 所とし,胼胝などのある部位は避けた.測定は健常者の 足部での正常値16)とされている3.22∼4.08を目安とし, 細いフィラメントから順に行った.口頭にて対象者に感 覚の有無と部位を確認し,部位が正答であった時点での 値を結果として採用した.各部位での測定結果をgに換 算し,左右ごとに平均した値を代表値とした.なお, SWMの検者内信頼性は高いことが報告されている (ICC=0.78)16). 振動覚検査にはRydel-Seiffer音叉(RS; BONIMED 社製,ライデルセイファー音叉,128 Hz)を用いた. 脱失の0から正常の8まで9段階の順序尺度で振動覚 の程度を測定でき,測定部位は両側内果とした.測定は 同一部位で3回実施し,3回の平均値を算出したため, 小数点以下1桁までを採用した.なお,RSによる測定 法は高い検者内および検者間信頼性と反応性が報告され ている17). 立位バランス評価は,硬い支持面(firm floor: FF)と フォームラバーを用いた軟らかい支持面(foam rubber: FR)上で上肢を支持しない状態での立位保持を,それ
ぞれ開眼(eyes open: EO)と閉眼(eyes closed: EC)で
実施した.また,それら4条件に加え,脳卒中片麻痺患
者特有の立位バランスや支持面への適応能力を評価する ため,一側のみ軟らかい支持面(麻痺側が軟らかい支持 面:foam rubber at the affected side: FRa,非麻痺側が軟 らかい支持面: foam rubber at the sound side: FRs)上で
の立位保持を,それぞれ開眼,閉眼の4条件で各30秒
間実施し,全8条件における立位保持の可否とその際の
COPを測定した.
測定条件は対象者の立位保持能力と課題の難易度を考
慮した上で,支持面と視覚条件を組み合わせ,FFEO,
FFEC,FREO,FRECの順に行った.また,4条件の測 定実施後に,一側のみの軟らかい支持面と視覚条件を組 み合わせ,FRaEO,FRaEC,FRsEO,FRsECの順に行い,
どちらの測定においても開眼で30秒間の立位保持が不
可能であった場合は閉眼での測定は行わなかった.また,
FFEC,FRaEC条件で立位保持不可能であった場合でも, それぞれFREO,FRsEO条件の測定は実施した.FRの フォームラバーにはAIREX® Balance-pad plus(AIREX AG社製,25%圧縮抵抗20 kPa,密度55 kg/m3,張力
260 kPa,410×500×60(mm)) を 用 い た.AIREX Balance-padは,スポーツやリハビリテーションの分野 で幅広く使用されている18).FRa,FRsにはAIREXの 対側に同程度の高さの自作の台を設置した.
COPの測定にはTWIN GRAVICORDER(アニマ社製,
G-6100)を用い,測定時間30秒,サンプリング周波数 は20 Hzとした.COPの測定値は,各条件で30秒間立 位保持可能であった場合のみ採用した.測定は開脚立位 で行い,条件間の開脚の程度はできるだけ統一した. 測定は裸足で,日常的に装具を使用している場合は装 具を装着した状態で行った.装具を使用するのは,COP 動揺が減少することが報告されている2)が,装具を日 常的に使用している対象者の自然な立位姿勢制御におけ るCOPを測定するためである.対象の両上肢は体幹の 側方に下垂させ,「前を向いて真っ直ぐに立っていて下 さい.」と指示した.開眼条件では前方3 mの目線の高 さに設置した印を注視させた.閉眼条件で目を開ける, 介助が必要なほど大きくバランスを崩す,または手支持 を用いた場合は測定を中止した.疲労の影響を少なくす るため,対象者に疲労の程度を口頭にて確認し,各条件 間の休憩を2∼3分設けた. COPの動揺の程度と位置を示す指標として,総軌跡 長を算出した.また,全条件で立位保持可能であった対 象に関して,視覚および支持面の違いによる総軌跡長の 結果から,視覚情報と支持面情報への依存率を算出し た.支持面情報への依存率は開眼,閉眼それぞれで FRa/FF,FRs/FF,FR/FFを算出することで,それぞれ 麻痺側支持面への依存率,非麻痺側支持面への依存率, 支持面への依存率とした.同様に,床面条件ごとにEC/ EOを算出することで,視覚情報への依存率とした.こ れらの値は,1.0よりも大きいほど,視覚情報や支持面 情報への依存の程度が高いことを示している. 統計学的分析にはSPSS Statistics 20を用いた.全条 件で立位保持が可能であった対象者からのデータのみを 解析の対象とした.COPの総軌跡長の条件間の差の検 定と,依存率と依存率の条件間の差の検定には,視覚条 件と支持面条件の2要因による反復測定二元配置分散分 析を用い,交互作用が有意な場合には,条件ごとに反復 測定一元配置分散分析およびBonferroniの多重比較検 定を行った.また,視覚の依存率の差の検定には反復測 定一元配置分散分析を用いた.COPによる感覚情報の 依存の程度に関して,その条件間の比較や,指標と BBS,TUGなどのバランス・歩行能力評価指標との関 連性の検討にはSpearmanの順位相関係数を用いた.な お,有意水準は5%未満とした. 本研究は日高病院医療倫理委員会による審査のもと承 認を得ており(受付番号第16号),研究への協力依頼 の際,対象には研究に関する説明事項を記載した書面を 用いて説明を行った.説明後,同意の署名を得た上で本 研究の対象とした.
III.結 果
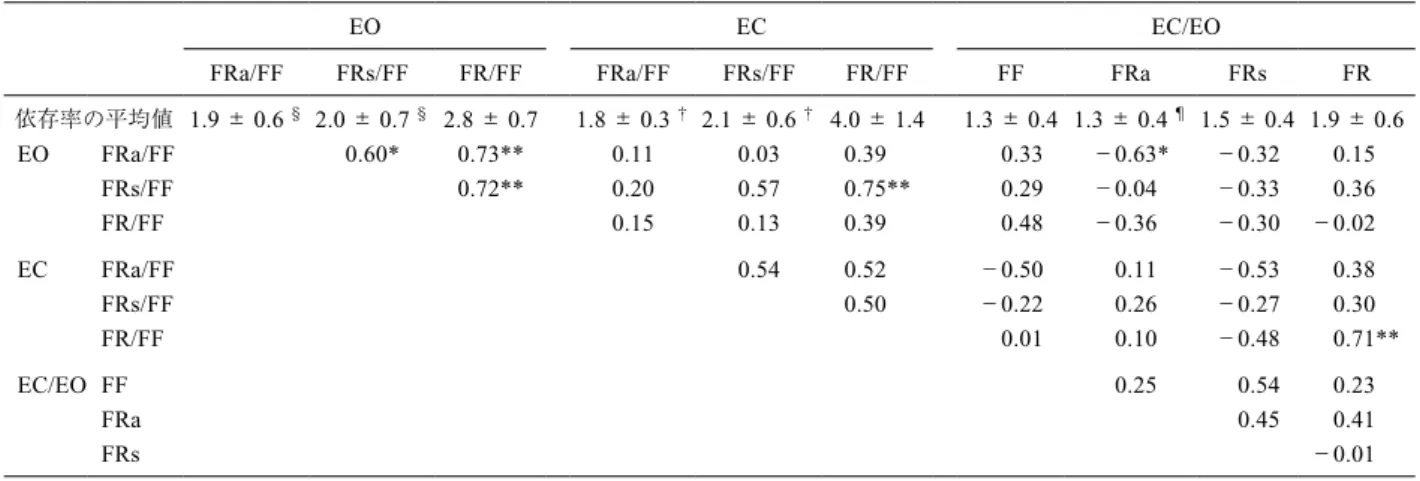
25名の対象者のうち,男性13名,女性12名であった. 年齢と罹患期間はそれぞれ,66.9±13.9歳,60.3± 40.3日(平均 ± 標準偏差)であった.表1に対象者の 属性を示す.BBS,TUGの平均値はそれぞれ42.6± 11.3点,30.8±43.6秒と,立位バランスや歩行能力が それほど高くない者が多かった.感覚障害の程度は,触 覚,振動覚とも非麻痺側下肢に比べて麻痺側下肢で低下 していた. 表2に各条件で30秒間立位保持が可能であった人数 と総軌跡長を示す.両側の支持面を変化させた場合,FFEO,FFEC,FREO,FRECの順に30秒間立位保持 可能な対象が減少した.また,これと同じ順で総軌跡長 が増加した.一側のみ支持面を変化させた場合は,FRa よりもFRsで30秒間立位保持可能な対象が減少し,開 眼よりも閉眼で総軌跡長が増加した.総軌跡長に関して, 2要因による反復測定の二元配置分散分析の結果,有意 な交互作用がみられため,視覚と支持面全ての条件ごと に一元配置分散分析を行った.その結果,異なる支持面 の4条件間では,開眼,閉眼ともに,FRa-FRs間を除 く全ての条件間に有意差が認められた(p<0.05).また, 視覚情報の2条件間では,4条件の支持面の内,FRaを 除く3条件でEO-EC間に有意差が認められた(p<0.05). 表3に視覚と支持面への依存率の平均値と関連性の解 析結果を示す.支持面情報への依存率についても同様に, 視覚と支持面条件間に有意な交互作用がみられたため, 全ての条件ごとに一元配置分散分析を行った.EO-EC 間の比較では,支持面への依存率にのみ有意差が認めら れた(p<0.05).支持面への依存率間の比較では,開眼, 閉眼ともにFRa/FF-FR/FF間とFRs/FF-FR/FF間に有意 差が認められ(p<0.05),FRa/FF-FRs/FF間には認めら れなかった.視覚情報への依存率は反復測定一元配置分 散分析の結果,FRa-FR間にのみ有意差が認められた (p<0.05).条件間の関連性に対するSpearmanの順位相 関係数による検討の結果,関連の程度は支持面依存率に ついてはEO-EC間で低く,視覚への依存率については FRsを除く支持面3条件間で低かった. 表4には感覚情報への依存率と機能障害,立位バラン ス,歩行能力との関連性の解析結果を示す.開眼での支 持面への依存率は,Br.Stageや下肢の表在感覚障害の程 度,立位バランスや歩行能力の指標であるBBS,TUG, FACとの関連性を示さなかった.閉眼での支持面への 依存率は,麻痺側支持面への依存率および麻痺側深部感 覚であるRS (as)間で有意な負の相関が認められた. 視覚情報への依存率は,FFおよび麻痺側深部感覚との 間,FRaおよび非麻痺側表在感覚であるSWM (ss)と の間でそれぞれ有意な相関が認められたが,それ以外の 条件では機能障害や,BBS,TUGなどの立位バランス, 歩行能力との関連性は認められなかった.
IV.考 察
本研究では,脳卒中片麻痺患者の視覚および支持面情 報への適応を評価するため,閉眼やフォームラバーを用 いた軟らかい支持面上での立位姿勢制御を評価した.ま た,片麻痺者特有の一側のみの身体機能障害を考慮し, 麻痺側,あるいは非麻痺側のどちらか一側のみを軟らか い支持面にした条件での立位姿勢制御を評価し,視覚お よび支持面情報の依存率と,機能障害,歩行能力との関 連性を検討した.30秒間立位保持可能であった人数は,FFEO,FRaEO,FFEC,FRaEC,FRsEO,FREO,
FRsEC,FRECの順に減少した.最も少なかったFREC
条件では,全対象者の内12名のみであったことから, 課題の難易度が高かったものと考えられる.総軌跡長は, 開眼,閉眼ともにFRa-FRs条件間を除く全ての条件間 表1 脳卒中片麻痺患者の基本属性(n=25) 項目 結果 麻痺側 左:13,右:12 麻痺側下肢Br. Stage II:1,III:3,IV:6,V:13,VI:2 BBS (点)* 42.6±11.3 (19-56) TUG (秒)*†† 30.8±43.6 (6.3-204.0) FAC 2:4人,3:8人,4:7人,5:6人 触覚:SWM (g)* 非麻痺側 2.5±2.7 (0.2-8.4) 麻痺側 21.0±38.6(0.5-127.7) 振動覚:RS* 非麻痺側 5.7±1.5 (3.3-8) 麻痺側 5.1±2.1 (0-8) *:平均値 ± 標準偏差(最小値-最大値),†:n=24,††:n=22,
Br.Stage: Brunnstrom recovery stage, BBS: Berg balance scale, TUG: Timed up and go test, FAC: Functional ambulation category, SWM: Semmes-Weinstein monofilaments, RS: Rydel seiffer.
の組合せに有意差が認められた.これは,閉眼では開眼 よりも視覚情報が減少し,FRでは体重心の位置と足関 節からの体性感覚情報との内的関連性が低下する19)た め,開眼よりは閉眼,硬い支持面よりは軟らかい支持面 条件で動揺が大きくなったと推察される.FRa-FRs条 件間の総軌跡長に有意差は認められなかった.脳卒中片 麻痺者は筋力低下,筋緊張の変化,協調性や感覚の統制 の問題など,様々な機能障害がバランスに影響を与えて おり20),麻痺側下肢の機能障害により,麻痺側下肢は 非麻痺側と比較しても立位バランスをコントロールする 機能は不十分である3).そのため,非麻痺側が軟らかく 不安定になるFRs条件で,FRa条件よりCOPの動揺が 大きくなることが予測された.しかし,これら両条件は どちらも一側のみが軟らかく,一側は硬く安定した床面 であったことから,条件間の課題の難易度に差がなく, 静的な立位では有意差が認められなかったと考えられ る. 総軌跡長のEO-EC間の比較では,FRaを除く3条件 間に有意差が認められた.麻痺側が軟らかく不安定な FRaでは,開眼,閉眼ともに,硬く安定した支持面から の情報を有効に活用し,機能障害を有さない非麻痺側下 肢で安定したバランスをとるよう戦略を変化させていた ため,視覚情報の違いによる動揺が少なかったためと考 えられる.これは,FRaが異なる支持面の4条件の内, 最も視覚依存率の平均値が低かったことからも同様の考 察が可能であり,このような安定した支持面や非麻痺側 下肢を有効に利用しようとする戦略は,立位での安定性 を向上させ2-4),日常生活場面での転倒予防にもつなが るといえる.しかし一方で,FRsやFRでは開眼に比べ て閉眼での動揺が大きいことから,非麻痺側が不安定に 表2 対象者ごとの脳卒中片麻痺患者の各条件における総軌跡長(cm)と30秒間立位保持可能な人数 No. 開眼(EO) 閉眼(EC) 硬い支持面 (FF) (n=25) 麻痺側のみ 軟らかい支持 面(FRa) (n=25) 非麻痺側のみ 軟らかい支持 面(FRs) (n=21) 軟らかい 支持面 (FR) (n=20) 硬い支持面 (FF) (n=24) 麻痺側のみ 軟らかい支持 面(FRa) (n=21) 非麻痺側のみ 軟らかい支持 面(FRs) (n=17) 軟らかい 支持面 (FR) (n=12) 1 21.6 64.1 42.2 82.6 33.4 57.9 53.3 142.9 2 28.7 54.7 54.7 89.2 46.4 73.1 82.6 151.2 3 29.9 67.8 71.5 91.9 52.5 106.0 130.8 286.0 4 32.6 43.1 49.4 75.6 29.4 66.6 73.7 91.5 5 33.5 75.7 90.6 106.5 47.2 72.3 136.3 162.8 6 35.0 41.2 82.5 105.2 37.8 73.4 94.6 260.9 7 39.8 58.2 43.4 59.3 40.5 73.5 66.4 132.9 8 39.9 61.9 119.9 121.4 59.3 109.4 203.3 298.4 9 43.3 95.3 78.4 78.5 44.1 94.7 97.9 165.9 10 47.1 45.7 45.0 104.8 55.1 64.6 82.9 120.2 11 51.3 140.2 147.0 168.6 53.0 100.5 91.8 246.7 12 62.9 95.5 97.2 178.5 130.3 163.5 187.1 274.2 13 36.4 59.7 84.2 142.0 40.7 75.4 74.1 − 14 30.4 51.6 90.0 107.3 47.8 60.0 120.9 − 15 47.1 64.3 101.8 107.9 68.3 83.4 119.0 − 16 65.9 90.1 93.3 131.4 123.6 173.7 174.8 − 17 84.8 162.0 134.8 225.1 92.9 208.1 161.9 − 18 41.7 71.0 89.3 107.7 86.4 141.9 − − 19 97.0 128.8 151.8 255.4 137.5 210.9 − − 20 129.4 121.1 173.2 174.0 153.4 210.6 − − 21 48.9 69.9 71.1 − 52.9 − − − 22 76.1 86.2 − − 96.9 122.5 − − 23 59.3 150.4 − − 76.6 − − − 24 126.7 138.0 − − 113.0 − − − 25 275.0 222.3 − − − − − − 平均値* 38.8 70.3 76.8 105.2 52.4 87.9 108.4 194.5 標準偏差* 11.2 28.4 33.1 36.0 26.1 29.4 47.1 73.2 * 全条件で立位保持可能であった12名の結果,FF: firm floor, FR: foam rubber, FRa: foam rubber at the affected side, FRs: foam rubber at the sound side, EO: eyes open, EC: eyes closed.
なる条件では立位姿勢制御を視覚に依存しやすく,また, 非麻痺側支持面情報への適応性を有さない可能性があ る. 支持面への依存率に関してみると,FR/FFの支持面依 存率にのみEO-EC間で有意差が認められた.両側とも 軟らかい支持面のFRでは,立位姿勢制御に利用可能な 体性感覚情報が減少しており,全支持面条件の内,最も 立位が不安定になることが予測される.そのため,対象 者はフォームラバー上での立位姿勢制御に視覚や前庭覚 に感覚の重みづけを変化させて対応する必要があり,視 覚情報による依存率の変化が大きかったと考えられる. 視覚情報への依存率は反復測定一元配置分散分析の結 果,FRa-FR間にのみ有意差が認められた.FRは両側 とも支持面が軟らかく不安定で,異なる支持面の4条件 の内で最も動揺が大きかったが,FRaは非麻痺側が安定 しており,非麻痺側下肢の体性感覚情報を利用しようと する戦略をとっている可能性が高く,閉眼で視覚からの 情報が減少しても,動揺の変化が小さかったことが要因 と考えられる.これらの結果から,脳卒中片麻痺患者に おける立位バランスは,麻痺側や非麻痺側どちらか一側 のみの支持面情報が違う際は,支持面や視覚への依存率 の変化は小さく,視覚情報や両側の支持面情報が違う際 の支持面への依存率が大きいことが示唆される. 支持面依存率ではEO-EC間の関連性は低いことから, 視覚条件は特異性を有していると考えられるため,開眼, 閉眼それぞれの条件での練習効果が期待できる.同様に, 視覚への依存率はFRsを除く支持面3条件間での関連 の程度は低かったことから,FRsを除いた3条件それぞ 表3 視覚および支持面情報への依存率の間の相関(n=12) EO EC EC/EO
FRa/FF FRs/FF FR/FF FRa/FF FRs/FF FR/FF FF FRa FRs FR 依存率の平均値 1.9 ± 0.6§2.0 ± 0.7§ 2.8 ± 0.7 1.8 ± 0.3† 2.1 ± 0.6† 4.0 ± 1.4 1.3 ± 0.4 1.3 ± 0.4¶ 1.5 ± 0.4 1.9 ± 0.6 EO FRa/FF 0.60* 0.73** 0.11 0.03 0.39 0.33 −0.63* −0.32 0.15 FRs/FF 0.72** 0.20 0.57 0.75** 0.29 −0.04 −0.33 0.36 FR/FF 0.15 0.13 0.39 0.48 −0.36 −0.30 −0.02 EC FRa/FF 0.54 0.52 −0.50 0.11 −0.53 0.38 FRs/FF 0.50 −0.22 0.26 −0.27 0.30 FR/FF 0.01 0.10 −0.48 0.71** EC/EO FF 0.25 0.54 0.23 FRa 0.45 0.41 FRs −0.01
平均 ± 標準偏差,Spearman の順位相関係数 *:p<0.05,**:p<0.01,§:FR/FF(EO)と有意差あり,†:FR/FF(EC)と有意差あり, ¶:FR(EC/EO)と有意差あり,FF: firm floor, FR: foam rubber,FRa: foam rubber at the affected side,FRs: foam rubber at the sound side, EO: Eyes Open,EC: eyes closed,FRa/FF: 麻痺側支持面への依存率,FRs/FF: 非麻痺側支持面への依存率,FR/FF: 支持面への依存率,EC/ EO: 視覚情報への依存率.
表4 感覚情報への依存率と立位バランス,歩行能力との相関(n=12)
EO EC EC/EO
FRa/FF FRs/FF FR/FF FRa/FF FRs/FF FR/FF FF FRa FRs FR
Br.Stage 0.070 −0.200 −0.106 0.352 −0.235 0.188 −0.576 −0.470 0.000 −0.446 BBS 0.313 −0.095 −0.018 0.246 0.313 0.243 −0.067 0.004 0.254 0.355 TUG 0.315 0.399 0.091 −0.126 0.147 −0.084 0.217 0.168 0.035 −0.070 FAC −0.038 −0.023 0.061 0.038 0.153 0.000 −0.351 0.031 −0.305 −0.252 SWM(as) −0.270 0.105 −0.109 −0.207 −0.119 −0.049 0.200 0.070 0.102 0.382 SWM(ss) 0.224 −0.109 0.200 0.109 −0.357 0.004 −0.312 −0.697* 0.210 −0.560 RS(as) −0.131 0.384 0.329 −0.611* 0.177 0.011 0.583* 0.452 −0.049 0.392 RS(ss) 0.350 0.534 0.548 −0.410 0.057 −0.078 0.484 0.240 −0.329 −0.110 Spearmanの順位相関係数 *:p<0.05,**:p<0.01,FF: Firm floor, FR: Foam rubber, FRa: Foam rubber at the affected side, FRs: Foam rubber at the sound side, EO: Eyes open, EC: Eyes closed, Br.Stage: Brunnstrom recovery stage, BBS: Berg balance scale, TUG: Timed up and go test, SWM: Semmes-Weinstein monofilaments, RS: Rydel seiffer, as: affected side, ss: sound side, FRa/FF: 麻痺側支持面への依存率,FRs/FF: 非麻痺側支持面への依存率,FR/FF: 支持面への依存率,EC/EC: 視覚情報への 依存率.
れの支持面での練習効果が期待できる. これまでの結果から,脳卒中片麻痺患者は麻痺側から の体性感覚情報が減少する環境では,より非麻痺側下肢 で立位姿勢制御を行うことで安定した立位を保っている 可能性が示唆される.また一方で,視覚情報や非麻痺側 の支持面情報の違いに対する適応能力が低下しており, 視覚や支持面の条件はそれぞれに特異性を有するため, その条件を変化させながら,様々な条件で立位バランス 練習を行うことで,視覚や支持面情報への適応性が向上 する可能性がある.Kimら21)は脳卒中片麻痺患者に対 して視覚と支持面情報を操作した3条件で二重課題ト レーニングを実施した結果,全ての条件でトレーニング 前後でのバランスの向上が認められ,特に視覚と支持面 の両方を操作した二重課題トレーニングでの効果が大き かったと報告している.脳損傷患者に対する練習には豊 富な環境,様々な課題設定で行う必要があることを示し ており,本研究の立位保持課題のように,視覚や支持面 条件を多様に組み合わせた課題の練習も有効である.非 麻痺側の支持面情報の変化に対する適応能力が向上する ことで,より不安定な支持面上でも安定した立位保持や 歩行が可能になることが予測される.さらに,麻痺側は 機能障害を有するものの,その支持性や支持面情報への 適応能力が向上することで,FRsのように非麻痺側が不 安定であっても,身体動揺を最小限にとどめることが可 能である. 感覚情報への依存率と機能障害との関連性の程度をみ ると,開眼での支持面への依存率には,Br.Stageや下肢 の表在感覚障害の程度,立位バランスや歩行能力の指標 であるBBS,TUG,FACとの関連性は認められなかっ た.また,閉眼での支持面への依存率には,麻痺側支持 面への依存率と麻痺側深部感覚間で有意な負の関連性が 認められたが,それ以外の機能障害や,立位バランスや 歩行能力との関連性は認められなかった.視覚への依存 率は,FFと麻痺側深部感覚間,FRaと非麻痺側表在感 覚間でそれぞれ有意な関連性が認められたが,それ以外 の条件では機能障害や,BBS,TUGなどの立位バラン ス,歩行能力との関連性は認められなかった.我々は以 前,視覚と支持面情報を操作した際のCOPと機能障害 との関連性を検討し,総軌跡長と,下肢機能障害,立位 バランスおよび歩行能力との関係を報告した10).視覚 や支持面情報への適応が不十分な対象ほど,立位バラン スや歩行能力が低かったが,本研究では感覚情報への依 存率と機能障害の関連性は認められなかった.この結果 から,立位バランスや歩行能力によらず,対象者によっ て視覚や支持面情報への依存の程度は異なるため,その 練習効果が期待できる. 本研究では,対象者の立位保持能力を考慮し,条件や 対象者間で足位を統一しなかった.今後は条件や対象者 ごとに開脚の幅を統一した立位でCOP計測を行うこと で,条件間のCOP変位など,多面的な解析が可能にな り,さらなる詳細な検討が可能になると考える.また, 今回は歩行能力との関連性を検討するため,日常的に装 具を使用している対象は装具を装着した状態で立位バラ ンスの測定を行った.装具を装着することで,足底から の感覚情報が低下することや,COPの動揺が軽減する2) ことから,今後は,装具の有無による立位バランスへの 影響の検討も必要である.また,依存率に関する検討は 全ての条件で立位保持可能であった12名で解析を行っ ており,対象者間の立位バランスや歩行能力の差が小さ かったことも要因と考えられる. 立位姿勢制御における感覚情報の変化に対する適応能 力の評価や介入には,閉眼条件やフォームラバーを用い ることで可能である.日常生活場面では,夜間や視覚障 害により視覚情報が減少し,布団や畳などの軟らかい支 持面では体性感覚情報が減少するため,対象者は感覚情 報の違いに応じてその重みづけを変化させ,支持面に適 応することで,安定した立位保持が可能になる.片麻痺 のように一側のみの障害の場合,立位の不安定性を最小 にするには,圧中心を非麻痺側に移動させることで安定 した立位保持が可能であり1),本研究の対象者も支持面 情報の違いに応じて,非麻痺側下肢からの情報を有効利 用するような立位姿勢制御を行っている可能性がある. 立位バランスや歩行能力によらず,視覚や支持面情報を 様々に組み合わせた課題を練習することで,多様な環境 の変化に適応することが可能になる. 謝辞 本研究を進めるにあたり,日高病院後閑浩之統括 をはじめ,回復期リハビリ室,MWS日高在宅支援セン ターのスタッフの皆様に多大なるご協力を賜りましたこ とに厚く御礼を申し上げます.また,本研究にご協力頂 きました,対象者の方々にも深く感謝申し上げます. 引用文献
1) Mansfield A, Danells CJ, Black JL, et al.: Determinants and consequences for standing balance of spontaneous weight-bearing on the paretic side among individuals with chronic stroke. Gait Posture, 2013, 38(3): 428-432.
2) Marigold DS, Eng JJ.: The relationship of asymmetric weight-bearing with postural sway and visual reliance in stroke. Gait Posture, 2006, 23(2): 249-255.
3) Handrickson J, Patterson KK, Inness EL, et al.: Relationship between asymmetry of quiet standing balance control and walking post-stroke. Gait Posture, 2014, 39(1): 177-181. 4) Barra J, Oujamaa L, Chauvineau V, et al.: Asymmetric
standing posture after stroke is related to a biased egocentric coordinate system. Neurology, 2009, 72(18): 1582-1587. 5) Pai Y-C, Rogers MW, Hedman LD, et al.: Alterations in
weight-transfer capabilities in adults with hemiparesis. Phys Ther, 1994, 74(7): 647-657.
6) Genthon N, Rougier P, Gissot A-S, et al.: Contribution of each lower limb to upright standing in stroke patients. Stroke, 2008, 39: 1793-1799.
7) 田中 繁,高橋 明 訳:モーターコントロール 運動制御の 理論と臨床応用.医歯薬出版,東京,2006,pp173-203. 8) Nasher LM, Shumway-Cook A, Marin O: Stance posture
control in select groups of children with cerebral palcy: Deficits in sensory organization and muscular coordination. Exp Brain Res, 1983, 49(3): 393-403.
9) Shumway-Cook A, Horak FB: Assessing the influence of sensory interaction on balance. Phys Ther, 1986, 466(10): 1548-1550.
10) 大河原七生,臼田 滋:脳卒中片麻痺患者における視覚と 支持面の条件の違いが立位姿勢制御に及ぼす影響.理学療 法科学,2014,29(1): 33-38.
11) Genthon N, Gissot AS, Froger J, et al.: Posturography in patients with stroke estimating the percentage of body weight on each foot from a single force platform. Stroke, 2008, 39(2): 489-491.
12) Brunnstrom S: Movement Therapy in Hemiplegia. Harper & Row Publications, New York, 1970, pp1-30.
13) Berg KO, Wood-Dauphinee SL, Williams JI, et al.: Measuring balance in elderly:preliminary development of an instrument. Physiotherapy Canada, 1989, 41(6): 304-311.
14) Pdsiadlo D, Richardson S: The timed “up and go”: a test of basic functional mobility for frail elderly persons. J Am Geriatr Soc, 1991, 39(2): 142-148.
15) Holden MK, Gill KM, Magliozzi MR: Gait assessment for neurologically impaired patients. standards for outcome assessment. Phys Ther, 1986, 4: 1530-1539.
16) Collins S, Visscher P, De Vet HC, et al.: Reliability of the semmes weinstein monofilaments to measure coetaneous sensibility in the feet of healthy subject. Disabil Rehabil, 2010, 32(24): 2019-2027.
17) Merkies IS, Schmitz PI, van del Meche FG, et al.: Reliability and responsiveness of graduated tuning fork in immune mediated polyneuropathies. The inflammatory neuropathy cause and treatment (INCAT) group. J Neurol Neurosurg Psychiatry, 2000, 68(5): 669-671.
18) Lee YJ, Park J, Lee D, et al.: The effects of excerising on unstable surface on the balance ability of stroke patients. J Phys Ther Sci, 2011, 23: 789-792.
19) Geurts AC, Nienhuls B, Mulder TW: Intrasubject variability of selected force-platform parameters in the quantification of postural control.Arch Phys Med Rehabil, 1993, 74(11): 1144-1150.
20) Bonan IV, Colle FM, Guichard JP, et al.: Reliance on visual information after stroke. Part I: Balance on dynamic posturography. Arch Phys Med Rehabil, 2004, 85(2): 268-273.
21) Kim D, Ko J, Woo Y: Effects of dual task training with visual restriction and an unstable base on the balance and attention of stroke patients. J Phys Ther Sci, 2013, 25(12): 1579-1582.