論 文
幾何情報を保存する自己組織化可変モデルに基づく 目標曲面への人体組織表面モデルの写像 *
宮内 翔子
†a)諸岡 健一
†宮城 靖
††福田 孝一
†††辻 徳生
†倉爪 亮
†A Method for Mapping Tissue Surface Model onto Target Surface Based on Self-Organizing Deformable Model Preserving Geometrical Features
∗Shoko MIYAUCHI
†a), Ken’ichi MOROOKA
†, Yasushi MIYAGI
††, Takaichi FUKUDA
†††, Tokuo TSUJI
†, and Ryo KURAZUME
†あらまし 複雑な形状をもつ人体組織同士を比較する際,それぞれのメッシュモデルを,形状が単純な目標曲 面にいったん写像して,写像先で差異を比較する手法がある.このとき,対象組織で共通の解剖学的特徴が,目 標曲面上で同じ位置にあると,他の部位でも対応付けが容易になる.また,組織形状に近い曲面を目標曲面とし て選ぶことで,写像が単純で直感的になり,解析しやすくなる.しかし,従来の写像法では,写像先を直接的に 制御できず,また,従来法の目標曲面は平面や球面のみであり,形状を自由に設定するのは困難である.そこで,
本論文では,特に脳表モデルに対し,モデルの写像先を制御しながら,脳表に適した形状の目標曲面へ写像する 新たな手法を提案する.まず,自己組織化可変モデル変形法[1], [2]を用いて,モデルを目標曲面上へ写像する.
この変形法を用いることで,写像の直接的制御や,モデルと同一位相をもつ形状の目標曲面が使用可能となる.
この際,隣接していないモデルの頂点が,目標曲面上で同じ位置に写像されている折り畳みが生じている場合が あり,この折り畳みを除去する.次に,モデルの幾何情報の一つである,モデルの表面積に対する各パッチの面 積比を写像前後で保存しつつ,目標曲面に脳表を写像する.6個の脳表モデルを用いた実験を行い,提案手法は,
特徴領域を特定の位置に写像しつつ,脳表モデルを目標曲面へ滑らかに写像できることを確認した.
キーワード メッシュモデル写像,自己組織化可変モデル,脳表モデル,Free-Form Deformation,等積写像
1.
ま え が き近年,医用画像計測装置の性能が飛躍的に向上し,
高解像度の医用画像が取得可能になりつつある.また,
高解像度画像から作成された,臓器や筋骨格系の人体 組織の表面メッシュモデル
(
以降,モデルと呼ぶ)
を用 いた,治療・診断システム[3]
〜[6]
が普及しつつある.†九州大学大学院システム情報科学研究院,福岡市
Graduate School of Information Science and Electrical En- gineering, Kyushu University, Fukuoka-shi, 819–0395 Japan
††医療法人貝塚病院機能神経外科,福岡市
Department of Neurosurgery, Kaizuka Hospital, Fukuoka- shi, 812–0053 Japan
†††熊本大学大学院生命科学研究部,熊本市
Graduate School of Medical Sciences, Kumamoto University, Kumamoto-shi, 860–8556 Japan
a) E-mail: [email protected]
*本論文は学生論文特集秀逸論文である.
組織表面モデルを扱う処理の一つに,複数の同一組織 表面モデル間の類似性・関係性を調べることが挙げら れる.同一組織のモデル間では,大まかな形状は類似 しているが,患者の年齢・症例などによって,その形 状は多様である.統計的形状モデル
[7]
は,このよう な組織形状の共通性と多様性を,統計解析に基づいて モデル化したものである.統計的形状モデルを対象組 織形状の事前知識として用いることで,医用画像から 対象組織を安定して抽出することができ[8]
〜[10]
,コ ンピュータ支援診断への応用も行われている[11]
.組織表面モデルは,表面上にある頂点とそれを連結 した三角パッチから構成される.頂点数や頂点間の連 結関係などの構造は,同一組織であっても,各モデル ごとに異なる.したがって,複数の同一組織表面モデ ル間を比較するためには,まず,モデル間の対応付け を行う必要がある.しかし,特に,脳のような形状が
図1 パッチの折り畳み Fig. 1 Example of folded patches.
複雑な組織は,そのモデルを直接対応付けることは困 難である.これに対し,組織表面モデルを,平面や球 面など,形状が単純な目標曲面にいったん写像し,写 像先でモデル間を比較する手法がある.平面や球面は,
パラメトリック関数で表現できるため,その関数のパ ラメータを用いて,曲面上の点に施す処理を実行でき る利点があり,これまで様々な写像法が提案されてい る
[12]
〜[16]
.目標曲面上で,組織表面モデル間の対応付けを行う ためには,写像前のモデルの情報を保存しつつ,写像 後のモデルと目標曲面を一対一対応させなければなら ない.また,モデル間の対応付けを容易にするため,
対象組織で共通の解剖学的特徴を表す頂点
(
以降,特 徴点と呼ぶ)
が,目標曲面上で常に同一位置に写像さ れるべきである.このような写像を実現するためには,以下に挙げる
4
つの条件を満たす必要がある.まず,目標曲面へモデルを写像した際,図
1
が示すような,隣接していない複数の頂点が目標曲面の同じ位置に写 像され,複数のパッチが重なる「パッチの折り畳み」
が生じる場合がある.この場合,モデルの頂点と目標 曲面上の点が一対一対応関係ではなくなる.そのため,
1
番目の条件は,写像後に目標曲面上で折り畳みが発 生しないことである.第2
番目の条件は,目標曲面上 でモデル間を比較するために,モデルの位相情報とと もに,頂点の分布密度や頂点間の測地距離などの幾何 情報が,写像後も保存されていることである.写像に より,頂点数や連結関係が異なる複数の同一臓器モデ ルを,同じ頂点数と連結関係に変換することができる.具体的には,目標曲面のメッシュモデルを元の脳表面 へ逆に写像することで,目標曲面のメッシュモデルの 構造で対象臓器を記述する.このとき,頂点の分布密 度が写像前後で保存されていれば,元モデルの頂点分
布密度に依存せず,表面形状を均等にリサンプリング した対象臓器モデルを再構築できる.これにより,モ デル間の対応関係を容易に求められ,対応付けの精度 向上が期待される.第
3
番目の条件は,特徴点の写像 先を,ユーザが直接指定できることである.更に,大 腓骨や脊椎のように,球面と異なる形状をもつ組織の 場合,球面よりも,対象組織の形状に近い目標曲面を 写像先として選ぶことで,折り畳みが生じにくく,写 像が単純で直感的になり,解析がより容易になる.そ こで,4
番目の条件は,あらゆる形状を目標曲面とし て設定できることである.しかし,これら4
つの条件 を全て満たす写像法は,確立されていない.そこで,本論文では,上述の
4
条件を満たしなが ら,脳表モデルをモデルと同一位相をもつ形状の目 標曲面へ写像する方法を提案する[17]
.まず,自己組 織化可変モデル(SDM: Self-organizing Deformable Model) [1], [2]
の変形法によって,脳表モデルを目標 曲面へ大まかに写像する.この変形法を用いることで,写像の直接的な制御が可能となり,またモデルと同一位 相をもつ形状の目標曲面を使用できる.この写像では,
折り畳みが発生している可能性があるため,折り畳み 除去処理を行う.次に,
Free-Form Deformation [18]
を用いて,脳表モデルの特徴点を目標曲面上の指定し た位置へ移動させる.そして,写像前後でモデルの幾 何情報を保存するよう,脳表モデルを変形させる.
1. 1
関 連 研 究組織表面モデルを目標曲面に写像する方法として,
従来,球面調和関数
[12]
〜[15]
や可変モデル[16]
が用 いられている.前者の場合,モデルの頂点について3
次元のラプラス方程式を解き,その解を球座標で表す ことで,モデルを球面上に表現する.一方,後者は,エネルギー最小化に基づいてモデルの頂点を移動させ ることで,目標曲面に当てはまるようモデルを変形さ せる.しかし,従来,モデル写像法では,モデルの写 像先を直接的に制御する方法がなく,ユーザが試行錯 誤しながら頂点の移動を調整しなければならない.ま た,従来法は,目標曲面として平面あるいは球面を対 象とし,それ以外の形状をもつ目標曲面を考慮してい ない.
Gu
ら[14]
の手法は,球面以外の閉曲面への写 像可能性を示唆しているが,それを具体化する手法や 写像結果は示されていない.自己組織化可変モデル
(SDM)
は,可変モデルの一 つであり,競合学習とエネルギー最小化の組み合わせ によって,メッシュモデルを目標曲面に写像する.エネルギー最小化のみを用いる一般的な可変モデル
[16]
と異なり,
SDM
変形法では,モデルの頂点の写像先 や,目標曲面上での頂点の分布密度などを,ユーザが 直接的に指定でき,かつこれらの拘束条件を満たし つつ,モデルを目標曲面へ写像できる.また,目標曲 面が,モデルと同一位相であれば,任意の形状へモデ ルを写像することが可能である.これらの利点から,SDM
変形法を導入することで,先に述べた4
条件を 満たすモデル写像が実現できると期待される.しかし,脳表モデルの写像に
SDM
変形法を適用す ると,次のような問題がある.従来のSDM
変形法で は,折り畳みが生じないよう頂点を移動させている が,写像後に折り畳みが完全にないことは保証されて いない.Matsui
ら[2]
は,折り畳み問題を回避するた めに,Least-squares Meshes (LSM)
法[19]
を導入し ている.LSM
法は,モデルと目標曲面の点対応関係 を行列を用いて表し,その逆行列を求めることで,モ デルを変形させる.この行列の大きさは,頂点数の3
倍以上であり,頂点数の増加に伴い,逆行列の計算に 膨大な処理時間を要する.また,モデルと目標曲面の 点対応関係は,ユーザが指定する必要がある.折り畳 みが発生しないような変形を実現するためには,脳の ように凹凸部が多い形状の場合,特にモデルの凹部で 対応点を多くとらなければならず,ユーザに多大な労 力を強いる.更に,従来のSDM
変形法では,写像前 後で保存されるのは位相情報のみであり,幾何学的情 報の保存は考慮されていない.本論文では,上述の問題点を解決するために,従来 の
SDM
変形法に,折り畳み除去及び幾何情報保存写 像を組み込むことで,脳表モデルを目標曲面へ滑らか に写像する方法を提案する.提案手法では,幾何情報 を保存する写像として,等積写像に着目する.この写 像は,モデルの表面積に対するパッチの面積比が写像 前後で保存される写像で,これにより,モデル表面上 の点の分布密度が保存される.2.
自己組織化可変モデル本節では,
SDM
変形法を用いて,組織表面モデル を目標曲面へ写像する手法の概要を述べる.詳細は,文献
[1]
を参照されたい.SDM
変形法では,対象物のメッシュモデルを写像 の対象とする.一方,写像先である目標曲面は,多数 の点データから構成されており,これら点データを制 御点と呼ぶ.モデルの初期形状と,目標曲面の形状は,ともに同一位相であれば任意であり,初期モデルを完 全に覆うように目標曲面の大きさを設定する.ただし,
モデルと目標曲面は同位相であるとする.モデルの頂 点の中で,目標曲面での写像先を指定した場合は,そ の頂点を特徴点と呼び,写像先に最も近い制御点を,
その特徴点の対応点とする.
SDM
変形アルゴリズムは,以下のとおりである.こ こでは概要のみを述べる.各ステップの具体的な内容 については,文献[1]
を参照されたい.Step.S1
繰り返し回数を表すパラメータをj
とし,初 期値を0
とする.Step.S2
目標曲面から,一つの制御点p
(j) をランダ ムに選び,p
(j)との3
次元空間でのユークリッド距離 が最短となるモデルの頂点を,勝者頂点とする.もし,制御点
p
(j) が特徴点と対応しているなら,その特徴 点を勝者頂点とする.Step.S3
勝者頂点と,その周囲にある頂点を,制御点に近づくよう移動する.
Step.S4
全頂点が移動しないか,あるいはj ≥ J
を満 たすなら,Step.S5
へ進む.そうでなければ,j ← j +1
とし,Step.S2
へ戻る.ただし,J
は,制御点を選ぶ 最大繰り返し回数を示す.Step.S5
モデルの各頂点v
i(i = 1, 2, ..., N
v)
を,エ ネルギー関数が最小となるよう移動させる.ただし,N
vは,モデルの頂点数である.エネルギー関数の値 は,頂点v
iを含むパッチと,そのパッチの近傍にあ る制御点の距離の総和とする.Step.S6
モ デ ル が 目 標 曲 面 に 十 分 近 づ く ま で ,Step.S5
を繰り返す.3. SDM
変形法に基づく脳表モデル写像 図2
は,提案手法の流れを示す.まず,医用画像か図2 脳表モデル写像の流れ Fig. 2 Flow of a brain model mapping.
ら脳表モデルを作成する.このとき,医用画像から,
脳の中心付近に位置する前交連を抽出する.前交連は,
MRI
撮影の際の基準となるため,その位置を原点と する座標系でモデルを記述する.次に,2.
で述べた従 来のSDM
変形法によって,モデルを変形する.写像 したモデルで折り畳みが発生しているなら,折り畳み除去処理
(3.1)
を行う.その後,特徴点の写像位置制御法
( 3.2 )
を用いて,写像後の特徴点が,目標位置と 一致するよう,特徴点とその周囲の領域のみ変形させ る.最後に,等積写像( 3.3 )
を実現するよう,モデル を変形させる.3.1
以降では,各処理の詳細について 説明する.ここで,モデルの頂点
v
iに隣接する頂点とパッチをu
(i)k(k = 1, 2, ..., N
p(i))
,w
(i)k∈ W
iとし,W
iは,v
iに隣接する全てのパッチの集合を表す.また,
u
(i)k に よって構成される角柱領域を,1-ring
領域と定義する.以降では,
1-ring
領域の決定法について述べる.まず,全ての
u
(i)k の重心をg
iとする.次に,g
iに最も近い 目標曲面の法線ベクトルn
を求める.このn
を法線 ベクトルとし,且つg
iとの距離がd
である二つの平 面を作成する.これら2
平面を,それぞれ1-ring
領域 の上面と底面とみなす.各面に対して,u
(i)k から垂線 を下ろし,角柱の側面を決定する.このようにして構 成される角柱領域を,1-ring
領域として定義した.ま た,角柱の高さに関するパラメータd
は,目標曲面の 形状に合わせて決定した.3. 1
折り畳み除去従来の
SDM
変形法で,脳表モデルを目標曲面へ写 像した後,Athanasiadis
ら[20]
の手法に基づき,写 像結果から折り畳みを除去する.Athanasiadis
らは,球面上での折り畳み除去法を提案しているが,本手法 では,それを一般的な曲面に適用できるよう拡張する.
折り畳みは,頂点
v
iが,1 − ring
領域内に存在し ないことと考えられる.この考えに基づくと,v
i を1 − ring
領域内に移動させることで,折り畳みを除去 できる.本研究では,v
iの位置を,v
iの1 − ring
領 域内のパッチの面積で重み付けされた重心位置v
iに 更新することで,v
iを1 − ring
領域内に移動させる:v
i=
k
A
(i)wkG
(i)kk
A
(i)wk .(1)
ただし,
A
(i)k とG
(i)k は,v
iに隣接するパッチw
k(i)の 面積と重心である.ここで,v
iは,目標曲面上にある 保証はない.そのため,写像関数φ
を用いて,組織表面モデルの頂点
v
iを,最も近くにある制御点p
の近 傍へ写像させる.関数φ
は目標曲面の形状などに応じ て定義することができ,本研究では,式(2)
を用いた:v
i= φ(v
i) = p
v
iv
i.(2)
ただし,
y
は,ベクトルy
の大きさを表す.全ての 頂点が移動しなくなるまで,式(1)
,(2)
を用いて,全 頂点を繰り返し移動させ,折り畳みの除去を行う.3. 2 Free-Form Deformation
を用いた特徴点 の移動従来の
SDM
変形法の枠組みでも,特徴点を,特 定の制御点位置に写像することは可能である.しか し,前節の折り畳み除去処理で,モデルの全頂点を移 動させるため,特徴点も写像先の位置からずれが生 じてしまう.このずれを修正するために,Free-Form Deformation (FFD) [18]
を用いる.FFD
は,変形させたい部分を含む直方体を設置し,直方体を均等に分割して得られる制御格子点を移動さ せることで,間接的にモデルの変形を行う.
FFD
を 用いる利点として,目標曲面上にパッチの折り畳みを 発生させることなく,特徴点を目標の制御点位置に移 動できることが挙げられる.球面上で,モデルの特徴 点を特定の位置に移動させる方法[21]
があるが,この 手法は,球面上での移動にしか適用できない.一方,FFD
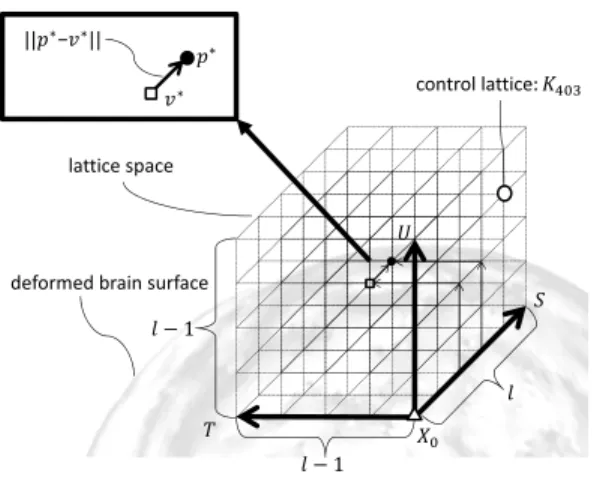
は,任意の曲面上で特徴点を移動可能である.ま た,モデルの変形範囲を柔軟に設定できる利点もある.そこで,変形範囲を特徴点周辺に限定することで,特 徴点を目標とする位置へ効率的に移動する.本手法で は,特徴点とそれに対応する制御点を含む直方体を設 定し,その特徴点と制御点が一致するよう,制御格子 点を移動させる.これにより,直方体外のモデル形状 は保ったまま,直方体内部のモデルの頂点を折り畳み などの不整合が起きないよう移動させる.
FFD
を適用するために,各特徴点ごとに,制御格 子点を設定する.特徴点をv
∗,それに対応する制御点 をp
∗とする.図3
に示すように,制御格子点は,S
,T
,U
を座標軸とする直交座標系で記述し,この座標 系をFFD
座標系と呼ぶ.はじめに,FFD
座標系の各 軸S
,T
,U
を決定する.S
軸は,p
∗とv
∗を結ぶベ クトルp
∗− v
∗と平行になるよう定める.次に,S
軸 と直交するベクトルの一つをT
軸と定める.U
軸は,S
軸とT
軸に直交するものとする.格子点間の距離を,
v
∗とp
∗のユークリッド距離と図3 FFDを用いた特徴点の移動
Fig. 3 Movement of a landmark position using FFD.
設定し,
S
軸方向にl
個,T, U
軸方向にl − 1
個の格 子点を均等に設置する(
図3)
.ただし,l
は奇数とす る.l
は格子空間のサイズを表す.l
に大きな値を設 定したとき,変形領域に他の特徴点が含まれる場合 があり,処理が収束しない可能性がある.一方,l
に 小さな値を設定した場合,変形領域は小さくなる.こ のとき,特徴点の対応する頂点位置への変位量が大 きい場合,局所的な領域で急激な変形が生じ,その結 果,パッチが潰れ,その後の処理が正しく行えなくな る可能性がある.これらの点を考慮し予備実験を行 い,本論文では,l = 7
とした.各軸方向にそれぞれa, b, c (0 ≤ a ≤ l, 0 ≤ b, c ≤ l − 1
を満たす整数)
番 目の制御格子点の位置K
abcは,次式で表す:K
abc= X
0+ a l S + b
l − 1 T + c
l − 1 U ; (3) X
0= v
∗− l − 1
2 1
l S + 1
l − 1 T + 1 l − 1 U
. (4)
ただし,ベクトル
S
,T
,U
は,それぞれS, T, U
軸 方向に平行なベクトルで,S
は格子点間距離のl
倍,T
,U
はl − 1
倍とする.また,FFD
座標系の 原点となるX
0は,v
∗= K
hhhかつp
∗= K
(h+1)hh(
ただし,h =
l−21)
となるように式(4)
によって設定 する.以上より,特徴点v
∗を含む,局所的な制御格 子空間F
v∗ 内に含まれるモデルの頂点v ∈ F
v∗ は,制御格子点を使って,
v = X
0+ sS + tT + uU (5)
と表される.そして,
(s, t, u)
をFFD
座標系でのv
の 座標値とする.ただし,0 ≤ s, t, u ≤ 1
とする.次に,設置した制御格子点を使って,特徴点
v
∗が 対応点p
∗と一致するよう,v
∗と同じ位置にある制御 格子点K
hhhを式(6)
によって移動させる:K
hhh← K
hhh+ 1
lB S
.(6)
変数
B
の値は,式(7)
によって求める:B = I
hl(s
v∗) × I
hl−1(t
v∗) × I
hl−1(u
v∗)
;(7)
ここで,
(s
v∗, t
v∗, u
v∗)
は,FFD
座標系でのv
∗ の座 標値である.関数I
は,次のように定める:I
nm(θ) =
mC
n(1 − θ)
m−nθ
n;(8)
ただし,m
C
nは二項係数を表し,0 ≤ m, n
とする.K
hhhを移動させると,それに伴い制御格子内の頂点 も移動する.この移動後の頂点の位置を,式(9)
によっ てFFD
座標系から世界座標系に変換する:v =
a
I
al(s)
b
I
bl−1(t)
c
I
cl−1(u)K
abc.(9)
まとめると,
FFD
を用いた特徴点の移動アルゴリ ズム(
以降,特徴点位置合わせ処理と呼ぶ)
は以下のと おりである.Step.F1
各特徴点ごとに,以下の処理を行う.1)
各特徴点ごとにFFD
座標系を設定する.2)
格子点K
hhhを式(6)
を用いて移動させる.3)
式(9)
を使って,格子空間内の全ての頂点を移 動させる.Step.F2
式(2)
を用いて,移動後の頂点を目標曲面 上へ完全に写像する.Step.F3
全ての特徴点が目標となる頂点の近傍に存在している,つまり,全特徴点が
p
∗−v
∗< τ (τ
:し きい値)
を満たすならば終了,そうでなければStep.F1
へ戻る.3. 3
等積写像の実現特徴点の位置合わせを行った後のモデルに対して,
元の形状でのモデルとの面積等値性を保つよう,モデ ルの頂点を移動させる.三角メッシュモデルを
D
Wと し,D
W と同じ面積をもつ多角形領域D
∗を考える.ここで,目標曲面を記述する曲面関数のパラメータ数 は
2
であるため,D
∗の次元数は2
である.このとき,等積写像
σ : D
W→ D
∗とは,写像前のパッチの面積A
wと,写像後のパッチの面積σ(A
w)
が等しくなる写 像である.つまり,等積写像は,関数E(σ) =
w∈W
(σ(A
w) − A
w)
2(10)
において,
E(σ) = 0
を満たすことと定義される[22]
. ここで,W
は,D
W を構成する三角パッチの集合を 表す.しかし,本研究では,モデルと目標曲面の表面 積が,必ずしも等しくないため,E(σ)
を用いること はできない.そこで,式(10)
の代わりに,目的関数E
(σ) =
w∈W
σ(A
w)
Σ
w∈Wσ(A
w) − A
wΣ
w∈WA
w(11)
を定義する.ここで,写像前の組織表面モデルの頂点
v
iの1 − ring
領域に含まれる,パッチの集合W
iに 注目する.このとき,式(11)
は次のように書き換え られる:E
(σ) ≈
i
e
i(σ); (12)
e
i(σ) =
w(i)k ∈Wi
σ(A
wk(i)
)
w(i)k ∈Wi
σ(A
w(i)k
) − A
w(i)k
w(i)k ∈Wi
A
w(i)k
.
(13)
ここで,局所的に最適な選択を繰り返し,大域的な近 似最適解を求めるアルゴリズムである,欲張り法
[23]
を導入する.式
(12)
が最小となるモデルの写像は,式(13)
が最小となるよう,v
iを移動させる処理を繰り返 し行うことで求める.本研究では,
v
iの移動範囲を1 − ring
領域内に限 定する.これにより,折り畳みが発生する可能性を抑 えることができる.この移動を実現するため,v
iの 隣接する頂点u
(i)k を用いて,次式よりv
iの移動候補v
(k)i を選ぶ:v
(k)i= v
i+ α(u
(i)k− v
i). (14)
ただし,
α
は実数であり,0 ≤ α < 1
.得られたN
p(i) 個の候補の中で,e
iが最小となるものを選び,その位 置へv
iを移動させる.この移動を,e
iの値が更新さ れなくなるまで繰り返し,e
iが最小値となる座標を,最終的な
v
iの位置とする.等積写像実現のための,頂点移動アルゴリズム
(
以 降,等積処理と呼ぶ)
は以下のとおりである.Step.A1
写像後のモデルからランダムに頂点を選び,以下の処理を行う.ただし,その頂点が特徴点ならば,
移動させない.
1)
式(14)
を用いて移動候補を選ぶ.2)
移動候補の中から,式(13)
が最小となる候補 の位置に,頂点を移動させる.Step.A2
全ての頂点についてStepA1
を行い,全頂 点が移動しなくなるまで,繰り返す.Step.A3
式(2)
を用いて,全頂点を目標曲面上へ完 全に写像する.Step.A3
の写像の際に,パッチの折り畳みが発生してしまう場合がある.ただし,その可能性は非常に低 く,例えば,今回行った実験においては,
4
万枚程度の パッチに対して,折り畳まれたパッチはわずか2
枚で あった.仮に折り畳みが発生した場合でも,そのパッ チを構成する頂点のみを,式(1)
を用いて移動させる ことで,折り畳みを除去することが可能である.4.
実 験提案したメッシュモデル写像法(図
2
)の有効性を 検証するため,脳表モデルを図4
に示す目標曲面へ写 像する実験を行った.実験で用いた6
つの脳表モデル の頂点及びパッチ数を表1
中2
・3
列目にそれぞれに 示す.また,使用した目標曲面は,脳の概形を示した もので,以降,簡易脳曲面とよぶ.簡易脳曲面は,全 体的に楕円体で,側頭葉と小脳にあたる部分に凸状形 状をもつ.写像を制御する特徴点として,大脳縦列・外側溝・小脳
(
図5)
から計11
点を用いた.特徴点位(a) front (b) top (c) left lateral surface 図4 簡易脳曲面
Fig. 4 A simple brain surface.
図5 解剖学的特徴(大脳縦列・外側溝・小脳) Fig. 5 Landmarks of brain (longitudinal fissure of
cerebrum, lateral sulcus and central sulcus).
(a) (b) (c) (d) (e) 図6 (a)脳表モデル2と(b-e)提案手法の各処理結果:(b)従来のSDM法による変形;
(c)折り畳み除去;(d)特徴点の位置合わせ;(e)等積写像
Fig. 6 (a) brain surface model and (b-e) the resulting model by the proposed method: (b) the original SDM deformation; (c) the removal of folded patches; (d) the movement of feature vertices; and (e) the area-preserving mapping.
表1 実 験 結 果 Table 1 Experimental results.
vertices patches number of folded patches distance error (eq.(15))[%]
the rate of the patches which satisfyEarea<0.1[%]
before
after (non genus-0)
after
(genus-0) before after before after
brain 1 19,921 39,870 245 35 0 8.6 0.11 36.5 67.3
brain 2 19,981 39,966 234 8 0 7.41 0.03 40.4 73.0
brain 3 19,276 38,566 238 14 0 3.85 0.00 39.4 76.8
brain 4 19,980 39,956 117 1 0 5.58 0.03 38.8 71.5
brain 5 12,561 25,118 141 7 0 5.09 0.05 39.9 76.3
brain 6 15,527 31,050 183 30 0 6.81 0.00 35.5 74.2
average 6.22±1.57 0.04±0.04 38.4±1.80 73.2±3.20
置合わせ処理での
Step.F3
のパラメータτ
は0.01
,等 積処理の式(14)
のα
は0.1
とした.図
6
に,写像結果例として,脳表モデル2
(図6 (a)
) を用いた写像結果を示す.まず,従来のSDM
変形法 により簡易脳曲面へ脳表モデルを写像した(図6 (b)
). その後,折り畳み除去(図6 (c)
),特徴点位置合わせ(図
6 (d)
),等積処理を行い,最終的に図6 (e)
に示す 写像結果を得た.ここで,図6
の各処理結果は,写 像前の脳表モデル(
図6 (a))
でのパッチの法線ベクト ルを使ってシェーディング表示したものである.また,同図中の,赤色は特徴点,青色は制御点を表し,特徴 点とそれに対応する制御点は,同じ図形で表す.図
6
が示すように,6
つの脳表モデル全てにおいて,折り 畳みがなく,制御点を目標曲面の所望の位置に配置さ せつつ,脳表モデルを目標曲面に写像できた.次に,特徴点位置合わせ処理と,等積処理による結 果を評価する指標として,距離誤差と面積誤差を導入 した.距離誤差は,目標曲面の長辺
L
に対する,写像 後の特徴点v
∗と,それに対応する制御点p
∗のユーク リッド距離の比とし,E
dist= 100 × v
∗− p
∗L (15)
と定義する.
E
dist= 0
のとき,v
∗とp
∗の位置は完 全に一致している.面積誤差は,関数:E
area= S A
wσ(A
w) + 1 S
σ(A
w)
A
w− 2; (16)
S = Σ
w∈Wσ(A
w)
Σ
w∈WA
w(17)
を用いる
[15]
.E
area= 0
のとき,面積等値性は完全 に保存されている.6
つの脳表モデルについて,特徴 点移動処理前後のE
dist,等積処理前後のE
areaを,表
1
に示す.4. 1
考 察表
1
の4
列目は,従来のSDM
変形法を適用した 後,モデルに含まれる折り畳みパッチ数を示し,従来 のSDM
変形法では,折り畳みが生じている.構築し た折り畳み除去処理(3.1
)によって,折り畳みをほ ぼ全て除去することができた(表1
・5
列目).その実 験結果例を,図7
に示す.しかし,表1
の5
列目に 示すように,除去できなかった折り畳みもあった.例図7 折り畳み除去処理後の脳表モデルの写像結果 Fig. 7 A brain mapping result after our removing
folded patched processing.
図8 折り畳み除去処理で除去できないパッチ群の断面図 Fig. 8 Example of folded patches that can’t be re- moved by our removing folded patches pro- cessing.
えば,脳表モデル
3
については,238
枚存在したパッ チの折り畳みは,最終的に14
枚になった.完全に折 り畳みを除去できなかった理由は,元の脳表モデルに,隣接していないパッチ同士が共通の頂点をもつ,図
8
のようなパッチ群が含まれていたためである.そこで.このような不適切なパッチ群を半自動で除去してから,
再び元の形状の脳表モデルを写像し,折り畳み除去処 理を行った結果,パッチの折り畳みは,完全に除去で きた(表
1
の6
列目参照).通常,このような不適切なパッチは,医用画像から 組織表面モデルを作成するときに生じやすい.この不 適切なパッチを自動的に検出する方法は,未だ確立さ れておらず,手動で探す必要がある.しかし,膨大な 数のパッチから,手動で検出するのは非常に困難であ る.これに対し,本研究では,いったん目標曲面への 写像を行い,折り畳み除去をかけることにより,この ようなパッチ群のみが,除去できない折り畳みとして 残るため,自動的にその位置を特定することができる.
このように,提案手法では,モデルを球面と同相であ る曲面,種数
0
曲面[24]
に修正することができる.折り畳み除去処理後,特徴点とそれに対応する制御 点のずれを表す距離誤差(式
(15)
)は,平均6.22%
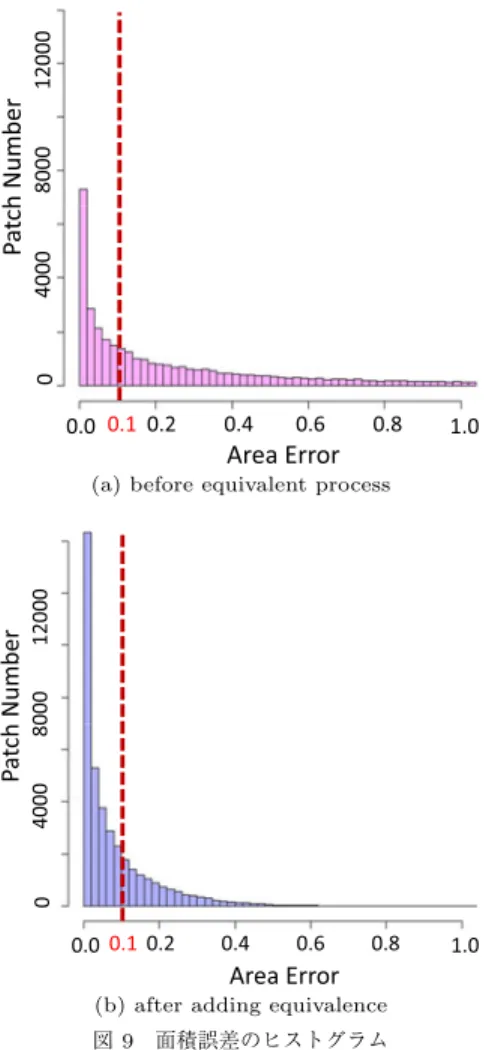
で(a) before equivalent process
(b) after adding equivalence 図9 面積誤差のヒストグラム Fig. 9 Histogram of area error.
あった(表
1
の7
列目).それに対し,構築した特徴 点移動処理(3.2
)により,距離誤差は平均0.04%
ま で減少した(表1
の8
列目).簡易脳曲面の長辺の長さ
282mm
より,この誤差をユークリッド距離に変換すると,
0.11mm
である.図6 (d), (e)
が示すように,特徴点は目標とする制御点とほぼ一致している.
表
1
の9
・10
列目は,写像前後での面積誤差(式(16)
)が0.1
未満のパッチ数を,全体のパッチ数に対 する比として示している.等積処理前の38.4%
に比 べ,等積処理後は平均73.2%
となり,1.9
倍にまで増 加している.ここで,脳表モデル4
の各パッチごとに 面積誤差を求め,その誤差のヒストグラムを作成した.図
9 (a)
及び(b)
は,それぞれ等積処理前後での面積 誤差のヒストグラムを示す.今回は,脳モデル4
に関 して,面積誤差0.0
から1.0
の範囲をグラフに示した.等積処理前は,全体のパッチ数に対し,
38.8%
しかこの範囲に含まれていなかったが,処理後は,
71.5%
も1.0
以下に含まれていることが分かる.また,図10
に,最終的な写像結果であるモデルを使って,各パッチを 面積誤差の値で色付けをした,誤差の分布図を示す.
赤色から青色になるにつれ,誤差が小さい,すなわち 面積等値性が保たれていることを示す.この図では,
一方向からのモデルのみを示しているが,図
9 (b)
の グラフに示すとおり,誤差が大きなパッチの数はほぼ0
であり,図10
で表示できていない部分については,誤差の大きなパッチは存在しない.この図から,誤差 は全体的に非常に小さくなっていることが分かる.以 上の結果から,等積処理を行うことにより,等積写像 は実現できたといえる.また,特徴点の位置にずれは なく,パッチの折り畳みもないことが確認された.
目標曲面と組織表面モデルの別の組み合わせの例と して,腓骨
(
図11 (a))
を棒状の目標曲面(
図11 (b))
に写像する実験を行った.図11 (c)
に,折り畳み除去 処理後の結果を示す.この際も,折り畳みが生じるこ(a) before adding equivalence (b) after adding equivalence 図10 面積誤差の分布 Fig. 10 Area error distribution.
(a) shinbone (b) target surface (c) mapping result 図11 腓骨の写像
Fig. 11 A calf bone mapping.
表2 計 算 時 間 Table 2 Computation time.
vertices computation time of each process
total time original SDM removal process
movement of feature vertices
area-preserving mapping
average 17,874 146.2 245.8 5.8 162.3 560.2
となく,写像ができていることが確認できた.
文献
[2]
で使用するLSM
法を,本実験のモデルに 適用した場合,最大約6
万×6
万の逆行列を求める 必要があり,膨大な計算時間を要する.実際に,脳モ デル5
に関して,11
点の対応関係を指定し,LSM
の 計算を行った.実験には,CPU
:Intel(R) Xeon(R) 3.33GHz
(12Core
)メモリ:11.7GB
のPC
を使用し た.その際,LSM
の計算過程で生成される行列が疎 行列であることを利用した高速化計算を行った場合で も,要した時間は722
分であった.脳モデル5
は,本 実験で扱ったモデルの中で最も頂点数が少ない.した がって,他の脳モデルに対してもLSM
による処理を 行った場合,計算時間は更に増大する.それに対し,本手法は,処理全体にかかった計算時間は
560
秒程度 であった.そのうち,従来のSDM
による変形は,146
秒程度であった.各処理の具体的な平均計算時間を,表
2
に示した.今回の実験では,提案手法に含まれる4
つの処理全てにおいて,全頂点若しくは全特徴点を 使用しているため,頂点数が増加すると,写像に要す る計算時間は増加する傾向が見られた.今回は,プロ グラムの最適化などを行っておらず,この最適化を行 うことで処理時間は短くできる.また,各処理におい て,処理対象が重複しないようスケジューリングを行 うことで,並列化することも可能である.並列化処理 を実現することで,更に実行時間は短縮できると考え られ,この並列化は今後の課題の一つである.5.
む す び本論文では,
SDM
変形法を元に,形状変化が激しい 脳表に対しても適用可能な,メッシュモデルの目標曲 面への写像法を提案した.はじめに,SDM
変形法を 用いて脳表を目標曲面へおおまかに写像した後,パッ チの折り畳みを除去する.次に,折り畳みのない状態 を保ちつつ,FFD
に基づいて脳表モデルを変形させ,特徴点の位置合わせを行う.最後に,特徴点の位置と 折り畳みのない状態を保存しつつ,写像結果が面積等 値性を保つよう,モデルの頂点を移動させ,モデルを 目標曲面に写像する.形状の異なる
6
つの脳表モデルと,脳とは形状が異る腓骨に対して行った実験により,
球面以外を目標曲面として設定した場合でも,パッチ の折り畳みが発生することなく,面積等値性を保ちつ つ,特徴点を特定の位置に写像できることが確認で きた.
本手法では,従来の写像法と異なり,目標曲面に対 する制限が少なく,扱うモデルの形状に合わせて写像 先の曲面を設定することができる.また,単純な閉曲 面へ写像を行う過程で,メッシュの構造が正しくない 部分を簡単に発見し,修正することができる.更に,
異なるモデルの特徴点が,同じ位置に写像されるよう に制御することが可能である.従来の試行錯誤的な位 置合わせと比べ,本手法では,対応する頂点を指定す るだけでよいため,ユーザへの負担は大幅に軽減さ れる.
提案手法は,医用画像やコンピュータグラフィック スなどの分野で,メッシュモデルを扱う要素技術とし て利用可能である.例えば,医用画像から直接切り出 したモデルは,臓器間で頂点数が異なるため,モデル 間の対応がとり難い.これに対し,提案手法を使って,
各モデルを同一目標曲面へ写像した後,この写像関係 から,目標曲面のメッシュモデルを各モデルへ逆写像 することで,頂点数が同じであり,特徴点間の対応も とれた,臓器モデルを作成できる.このようなモデル のリメッシングは,統計的形状モデルの作成だけでな く,様々な治療・診断システムに応用できると考えら れる
[25]
.現在の手法では,写像前の情報として位相 情報と面積等値性が保存できている.写像後の結果を 用いてモデル間を比較するためには,より多くの情報 が保存されていることが望ましい.例えば,面積等値 性とともに,モデルを構成するパッチの角度が写像前 後で保存される等角性を満たすことで,モデルのおお よその測地距離が,写像後も保存されることが示され ている[15]
.そこで,今後は,等積写像を実現する目 的関数に,更に等角写像の要素を加える予定である.謝 辞 本 研 究 は ,文 科 省 科 研 費( 基 盤 研 究
(c):
23500244
,基盤研究(B): 24390345)
及び厚労省科 研費(難治性疾患克服研究事業:201024171A
)の助 成を受けたものである.文 献
[1] K. Morooka and H. Nagahashi, “Self-organizing de- formable model: A method for projecting a 3d object mesh model onto a target surface,” InTech Computer Graphics, pp.19–38, 2012.
[2] S. Matsui, K. Aoki, and H. Nagahashi, “3d triangular mesh parameterization with semantic features based on competitive learning methods,” IEICE Trans. Inf.
& Syst., vol.E91-D, no.11, pp.2718–2726, Nov. 2008.
[3] H. Kobatake, “Future cad in multi-dimensional med- ical images – Project on multi-organ, multi-disease cad system,” Computerized Medical Imaging and Graphics, vol.31, no.4, pp.258–266, 2007.
[4] 佐藤嘉伸,“外科手術支援システム研究の現状と将来展望,” 信学誌,vol.89, no.2, p.144, 2006.
[5] P. Mc Laughlin, S.O. Neill, N. Fanning, A.M.
Mc Garrigle, O.J. Connor, G. Wyse, and M.M.
Maher, “Emergency ct brain: Preliminary interpre- tation with a tablet device: Image quality and di- agnostic performance of the apple ipad,” Emergency radiology, vol.19, no.2, pp.127–133, 2012.
[6] K. Morooka, M. Nakamoto, and Y. Sato, “A sur- vey on statistical modeling and machine learning ap- proaches to computer assisted medical intervention:
Intraoperative anatomy modeling and optimization of interventional procedures,” IEICE Trans. Inf. &
Syst., vol.E96-D, no.4, pp.784–797, April 2013.
[7] C. Lorenz and N. Krahnst¨over, “Generation of point- based 3d statistical shape models for anatomical ob- jects,” Computer Vision and Image Understanding, vol.77, no.2, pp.175–191, 2000.
[8] T. Heimann and H.-P. Meinzer, “Statistical shape models for 3d medical image segmentation: A re- view,” Medical image analysis, vol.13, no.4, p.543, 2009.
[9] 倉爪 亮,中村かほり,岡田俊之,佐藤嘉伸,菅野伸彦,
小山 毅,岩下友美,長谷川勉,“2視点からの二次元x線 投影像と統計的形状モデルを用いた大腿骨形状の三次元復 元,”信学論(D),vol.J90-D, no.3, pp.945–955, March 2007.
[10] 本谷秀堅,澤田好秀,“医用画像に対する曲面モデルの 非剛体位置合せのための統計形状モデル,”信学論(D),
vol.J96-D, no.4, pp.769–781, April 2013.
[11] 小原伸哉,A.H. Foruzan,健山智子,陳 延偉,古川 顕,
金崎周造,若宮 誠,村田喜代史,“肝臓の統計的形状モ デル構築と肝硬変診断支援への応用(一般,first person visionのための認識・理解),”信学技報,IE2010-18, 2010.
[12] K. Hormann, B. L´evy, A. Sheffer, et al., Mesh pa- rameterization: Theory and practice, SIGGRAPH Course Notes, 2007.
[13] A. Sheffer, E. Praun, and K. Rose, “Mesh parame- terization methods and their applications,” Founda- tions and TrendsR in Computer Graphics and Vi- sion, vol.2, no.2, pp.105–171, 2006.
[14] X. Gu, Y. Wang, T.F. Chan, P.M. Thompson, and S.-T. Yau, “Genus zero surface conformal mapping and its application to brain surface mapping,” IEEE Trans. Med. Imaging, vol.23, no.8, pp.949–958, 2004.
[15] F. Kruggel, “Robust parametrization of brain surface meshes,” Medical Image Analysis, pp.291–299, 2008.
[16] D. Jayadevappa, S. Kumar, and D. Murty, “Medi- cal image segmentation algorithms using deformable models: a review,” IETE Technical Review, vol.28, no.3, p.248, 2011.
[17] 宮内翔子,諸岡健一,宮城 靖,辻 徳生,倉爪 亮,“任 意曲面への脳表メッシュモデルの写像,”電子情報通信学 会医用画像研究会,vol.113, no.146, pp.945–955, 2013.
[18] T. Sederberg, “Free-from deformation of solid geo- metric models,” Proc. ACM SIGGRAPH in Comput- ers and Graphics, vol.20, no.4, pp.151–160, 1986.
[19] O. Sorkine and D. Cohen-Or, “Least-squares meshes,” Proc. IEEE, Shape Modeling Applications, pp.191–199, 2004.
[20] T. Athanasiadis, I. Fudos, C. Nikou, and V. Stamati,
“Feature-based 3d morphing based on geometrically constrained sphere mapping optimization,” Proc.
2010 ACM Symposium on Applied Computing ACM, pp.1258–1265, 2010.
[21] M.V.J. Glaunes and M.I. Miller, “Landmark match- ing via large deformation diffeomorphisms on the sphere,” Journal of Mathematical Imaging and Vi- sion, vol.20, issue 1-2, pp.179–200, 2004.
[22] M.S. Floater and K. Hormann, “Surface parame- terization: A tutorial and survey,” Advances in multiresolution for geometric modelling, pp.157–186, Springer, 2005.
[23] T.H. Cormen,R.L. Rivest,C.E. Leiserson(著),浅野 哲夫,梅尾博司,和田幸一,岩野和生,山下雅史(訳),ア ルゴリズムイントロダクション第2巻アルゴリズムの設 計と解析手法,近代科学社,1995.
[24] 梅原雅顕,山田光太郎,曲線と曲面,裳華房,2002.
[25] Y.-S. Cho, J.-K. Seong, S.Y. Shin, Y. Jeong, J.H.
Kim, A. Qiu, K. Im, J.-M. Lee, and D.L. Na,
“A multi-resolution scheme for distortion-minimizing mapping between human subcortical structures based on geodesic construction on riemannian manifolds,”
NeuroImage, vol.57, no.4, pp.1376–1392, 2011.
(平成25年6月1日受付,10月5日再受付)
宮内 翔子
平24九大・工・電情工卒.現在,同大大 学院システム情報科学府修士課程在学中.
三次元医用画像処理に従事.
諸岡 健一 (正員:シニア会員)
1995九州大学工学部情報工学科卒.2000 同大大学院博士課程了.同年(財)九州シ ステム情報技術研究所特別研究員を経て,
東京工業大学大学院理工学研究科附属像情 報工学研究施設助手.2006九州大学デジ タルメディシン・イニシアティブ助教授,2007同准教授.2010 九州大学医学研究院准教授を経て,同大システム情報科学研究 院准教授,現在に至る.博士(工学).医用画像情報処理,コン ピュータビジョン,コンピュータグラフィックス,パターン認 識の研究に従事.映像情報メディア学会,日本コンピュータ外 科学会,情報処理学会,日本ロボット学会,IEEE各会員.
宮城 靖
1989九州大学医学部卒業.1990山口赤 十字病院研修.1991九州大学医学部附属 病院脳神経外科.1996九州大学大学院医 学系研究科修了.1996貝塚病院脳神経外 科医員.1999ミシシッピ大学脳神経外科 研究員.2000貝塚病院機能神経外科部長.
2004九州大学病院脳神経外科助手.2006九州大学デジタル メディシン・イニシアティブ助教授.2007同准教授.2010貝 塚病院機能神経外科部長,現在に至る.博士(医学).九州大 学大学院医学研究院非常勤講師・共同研究員,福岡医療学院 非常勤講師,独立行政法人医薬品医療機器総合機構専門委員,
機能的定位脳手術技術認定医.日本生体医工学会評議員,The Scientific World Journal Editorial Board.
福田 孝一
1987大阪大学医学部医学科卒.1993同 大大学院医学研究科了.1993九州大学医 学部解剖学第三講座助手.2000九州大学 大学院神経解剖学講師.2006九州大学大 学院神経解剖学助教授.2010熊本大学大 学院形態構築学教授.神経解剖学に関する 研究に従事.博士(医学).日本解剖学会評議員,日本神経科学 学会会員.
辻 徳生 (正員)
2005年九州大学大学院システム情報科 学府知能システム学専攻博士課程修了.同 年広島大学大学院工学研究科,COE研究 員.2008年産業技術総合研究所知能シス テム研究部門,産総研特別研究員.2011年 九州大学大学院システム情報科学研究院情 報知能工学部門助教,現在に至る.多指ハンド,画像処理,コ ンピュータグラフィックスの研究に従事.博士(工学).日本ロ ボット学会,日本機械学会会員.
倉爪 亮 (正員)
1991年東京工業大学機械物理工学専攻 修士課程修了.同年(株)富士通研究所入 社,1995年東京工業大学機械宇宙学科助 手,2000年スタンフォード大客員研究員,
同年東京大学生産技術研究所博士研究員,
2002年九州大学システム情報科学研究院 助教授,2007年より同教授,現在に至る.博士(工学).日本 ロボット学会論文賞,日本ロボット学会功労賞,日本機械学会 ロボティクス・メカトロニクス部門学術業績賞等受賞.群ロボッ ト,歩行機械,レーザ計測の研究に従事.