測量学テキスト 2016 第 1 章 概説 1.1 測量の定義 測量とは,地表の自然および人工物の位置を求め, これを数値や図で表現する技術をいう.具体的には, 距離,高度差,角度などを測り,誤差を調整して,製 図等に必要な数値を算出し,図面や設計書を作成した り,またこれを利用して面積や体積を求めたりする一 連のデータ処理技術である. そして,測量に関する理論,方法およびそれらの応 用を研究する科学が測量学である. 字句的にみると,「測」も「量」も「はかる」と読み, 同義語に「計」などがある.科学技術の分野で「はか る」という行為は,何か対象となる物理量を,ある単 位を基準として相対的に把握することである.機器を 用いて,「はかる」行為を「測定」,「計測」,「計量」な どと表現するが,これらは主として単一あるいは部分 的に「はかる」ことである.これに対して,測量は上 述のようにいくつかの量を測り,処理する一連の行為 であり,全体的・システム的に「はかる」行為である といえる. 熟語では「観測」という言葉が連想される.これは, 自然現象の推移・変化を観察・測定することで,天文 学や気象学などの用語であるが,個々の測量の経過の なかで,「角を観測する」などと表現することもある. この場合,測定と観測は同じ意味で用いられている. 測定値と観測値などの用語が混在している著書も見か けるが,本書では,区別する必要のない場合は,観測 は使わずに,測定を用いることとする. さて,測量の対象が地物であることは,上の定義で も述べており,我が国の「測量法」にも土地に限定し ている.しかし,天文観測により地球上の各地点の位 置(緯度,経度)を求めるもの,あるいは地磁気,重力 等を対象とした地球物理学的な測定,河川・海洋にお ける測定なども測量の範囲に含める場合もある. また,地球の形状と大きさの測定を対象とする測地 学と深い関連をもっており,測量を測地学の一部とす る考えもある.さらに,測量の成果を地図として表現 することから,広義の地図学に測量を含ませる場合も ある. 最近では,航空機や人工衛星などに搭載されたセン サーによって,地表物体や空間・流体などの諸現象を 電磁波特性を利用して,広域かつ間接的に調査するリ モートセンシングも測量に含まれる. 1.2 測量の分類 測量はいくつかの観点から分類されるが,主なもの を挙げれば図 1-1 に示すようなものがある. (a) 区域の大小による分類 ① 大地測量 : ② 平面測量 : (b) 法律による分類 ① 基本測量 : ② 公共測量 : ① 巻尺測量 ① 地形測量 三角測量 ② 平板測量 ② 地積測量 ① 基準点測量 多角測量 ③ ③ 土木測量 水準測量 ④ レベル測量 ④ 建築測量 地形測量 ⑤ コンパス測量 ⑤ 森林測量 ② 細部測量 地積測量 ⑥ 写真測量 ⑥ 鉱山測量 水路測量 : : ③ 応用測量 河川測量 : (d) 目的による分類 (e) 内容による分類 地球の形状を考慮して行う広範囲の測量 地球の表面を平面とみなす小範囲の測量 すべての測量の基礎となるもので国土地理院の行う測量 基本測量以外の測量のうち、費用を国または公共団体が負担ない し補助するもの トランシット測量 (c) 使用機器による分類 図 1-1 測量の分類 1.3 測量に用いられる単位 測量の基本的な測定は角と距離である.角度の単位 は,360 度法[単位記号:°]が一般に用いられる.rad(ラ ジアン)や grad(グラード)も用いられることがあるが, これらの関係は以下の通りである. 1°= 180 π rad,360°=400 grad 距離の単位は,メートル法[単位記号:m]を用いる のが一般的で,国際的に SI 単位系の基本単位とされて いる.1m は,1790 年代に地球の北極から南極までの 子午線長の 1,000 万分の 1 と定義された.これを現示 するためにメートル原器が作られたが,測定に種々の 誤差が避けられないので,1900 年にこの原器が示す長 さを1m と定義し,ガス状のクリプトン 86(Kr86)のだすオ レンジレッドのスペクトル線の波長の 1,650,763.73 倍 と決められた.しかし,電磁波の測定精度が向上し, 1983 年に以下のように再定義された. 1m=光が 1 299,792,458秒の時間に真空を進む距離 1.4 地球の形状と緯度・経度 地球の形状は,ジオイド面できめられる.海につい ては平均海面,陸については,無数に運河を掘って海 水を導いたと仮定してできる面をジオイド面という. このジオイド面は重力の等ポテンシャル面である.ジ オイドは重力場に直交し,重力場の方向は地球内部の 密度の不均一さのため場所によって不規則である.そ のため,ジオイド面は,物理的な地表面ほどではない が,図 1-2 に示されるような不規則な形状をしており, 「西洋梨型」,「おにぎり型」,「ジャガイモ型」などと 呼ばれている.地球の形状を数学的に表現するには,
ジオイド面に近い回転楕円体に近似し,これを基準楕 円体と呼んでいる.基準楕円体は,図 1-3 のように長 半径a と短半径 b によって表現でき,これらの値は様々 な観測が行われ,表 1-1 のように逐次新しい値が計算 されてきた.我が国では,測地基準系 1980(GRS80)の 値が採用されている. もし,地球を球で近似するときには,地球の半径と して幾何平均の3 2a b≒6,370km とする. 地表のある点P の経度は,グリニッジを通る子午線 面とその点を通る子午線面のなす角 λ によって定義さ れる.グリニッジから東回りを正の方向として測る. 正の経度を東経,負の経度を西経という. 一方,ある点P の緯度は,その点から子午線に下し た垂線の延長が赤道面となす角φ によって定義される. 赤道から北を正の緯度(北緯),南を負の緯度(南緯)とい う. 1.5 距離と角度および地図 地表の2 点 A,B は,一般に図 1-4 のような位置関係 にある.これらを基準楕円体面状に正投影した点A1,B1 の弧長S は球面距離と呼ばれる.この長さがあまり長 くないか,またはそれほど精密な結果を必要としない 場合には投影面を水平面とすることが出来る.このと き,投影点A2,B2を結ぶ距離s は平面上の直線となり, これを平面距離または水平距離という. 一方,測量において主として測定される角は図 1-5 に示す水平角αと鉛直角βである. 基準楕円体面上の形を平面上に投影し地図を作る場 合,いかなる投影法を採用しても完全な相似形を得る ことは不可能である.このため,地図の目的に応じた 様々な投影法が考案されている.我が国では,日本を 19 の区域に分け,各々に平面直角座標系を設定してこ れを使用しているが,この場合の投影法として横軸等 角円筒図法の 1 つであるガウスクルーガー法が採用さ れている. ある地点から他の地点への方向を表す場合,基準と する方向の違いによって,方位角と方向角の2 つが使 われる.方位角は北を基準として時計回りに測った角 であり,北以外の任意の方向を基準として測った角を 方向角という. ところで,通常地球上では真の子午線と磁針の示す 方向は一致しない.真の子午線の方向は真北と呼ばれ, 磁針の指す方向は磁北と呼ばれる.また,一般に地図 は上方を北にするよう作成されるが,この北を平面直 図 1-2 地球の形状とジオイド 図 1-3 基準楕円体 表 1-1 主な基準楕円体の諸元 楕円体の種類 年代 赤道半径a(m) 扁 平 率 の 逆 数 (1/f) ベッセル楕円体 1841 6,377,397.155 299.152813 クラーク 〃 1880 6,378,249.145 293.4663 ヘルマート 〃 1907 6,378,200 298.3 ヘイフォード 〃 1909 6,378,388 297.0 クラソフスキー〃 1943 6,378,245 298.3 測 地 基 準 系 1980(GRS80) 〃 1980 6,378,137 298.257222101 注) f=(a-b)/a すなわち,短半径b は a(1-f). 図 1-4 距離 図 1-5 角 角座標系のX 方向とすれば真北や磁北と異なり,これ は座標北と呼ばれる.なお,真北と磁北の偏りを磁針 の偏差と呼ぶが,現在日本では,5°~9°程度西に偏 っている. 次に,方位とは子午線の北または南を基準として, これから東または西方向に測った90°より小さい水平 角の角度をいい,数値の頭に基準方向を示すN(北)また は S(南),末尾に測った方向を示す E(東)または W(西) の記号をつける.方位角と方位には表 1-2 に示すよう な関係がある. 表 1-2 方位角と方位 方位角(α) 方位 0°~90° NαE 90°~180° S(180°-α)E 180°~270° S(α-180°)W 270°~360° N(360°-α)W 図 1-6 方位角,方向角および北
1.6 我が国の測量の基準 我が国の位置の基準として,以下の日本経緯度原点が 設置されている. 地点:東京都港区麻布台二丁目十八番一地内 日本経緯度原点金属標の十字の交点 原点数値 経度:東経 139 度 44 分 28 秒 8869 緯度:北緯 35 度 39 分 29 秒 1572 原点方位角※ 32 度 20 分 46 秒 209 ※【原点方位角】日本経緯度原点において真北を基準として 右回りに測定した茨城県つくば市北郷1番地内つくば超長基 線電波干渉計観測点金属標の十字の交点の方位角と定められ ている. また,日本水準原点は以下の地点に設置されており, その高さは以下のようである. 地点:東京都千代田区永田町一丁目一番地内 水準点標石の水晶板の零分画線の中点 原点数値:東京湾平均海面上 24.3900m つまり,この水準原点の下24.3900m のところにジオ イド面があると規定していることになる. ところで,河川や港湾などの測量では,その地方の 干潮面を利用する方が便利であるので,表 1-3 のよう な各地に適合した特殊な基準面が設置されている.右 欄の数値は東京湾平均海面(Tokyo Peil:T.P.)との差であ る. 経緯度原点と水準原点を基準にして,三角点や水準 点などの国家基準点が全国各地に設置されている.国 土地理院が管理する三角点は,一等,二等,三等,四 等の種類に区分されており,全国で約10 万点,水準点 には,一等水準点と二等水準点の2 つがあり,主要な 道路に沿って,ほぼ2km の間隔で設置されており,約 2 万点ある. 表 1-3 特殊基準面 利根川(Y.P.) -0.8402m 荒川,多摩川(Arakawa Peil : A.P.) -1.1344m 大阪湾最低潮位(Osaka Peil : O.P.),淀川 -1.3000m
1.7 点の位置の求め方 測量を行う際に地表に測点を設置するが,この測点 は基準・目標となる点で,木ぐい,石ぐい,コンクリ ートぐいなどを用いる.アスファルトなどの路面には, 鋲を用いたり,ペイントでマーキングをして測点とす る.そして,測点と測点を結んだ線を測線といい,測 線の連結したものをトラバースという. さて,同一平面上の2 つの測点 A,B から新しい測 点C を求めるためには,図 1-7 に示すような方法があ る.(a)はAC および BC を測る三辺測量である.(b)は (a) (b) (c) (d) 図 1-7 点の位置の求め方 AB∟CD となる CD および AD または DB を測るオフセ ット測量(あるいは水準測量)である.(c)はAC と∠CAB を測るトラバース測量(あるいはスタジア測量)である. (d)は∠BAC および∠ABC を測る三角測量である. 3 次元における点の位置の求め方を,人工衛星を利 用した測量技術である GPS(Global Positioning System) で説明しよう. 衛星は高度2 万 km で傾斜角 55°の 6 つの異なった軌 道上を3 個ずつ周回する.各衛星は,軌道情報や時刻 信号の電波を地上に送る.地上ではこの電波を受信す るが,同時刻における3 つの衛星の軌道上の位置から 地上の観測地点の距離が即時計算される.4 つの点で 形成される三角錐の6 つの辺長が確定し,位置関係が 決定する.原理的には,3 つの衛星で位置が決定する が,実際には精度を上げるためもう1 つの衛星を加え, 合計4 つの衛星から電波を受信する.GPS は地表の静 的な位置を測定するだけでなく,動く船舶,車両,航 空機の位置や航法などに応用されている. 図 1-8 GPSによる位置の測定 1.8 測量の誤差と精度 一般に,物理量を測定する場合,どんなに精巧な器 械器具を用い,どんなに熟練しようとも必ず測定値に は以下のような誤差が伴う. ① 過誤(過失):過誤とは,測定者の不注意によって 生ずる誤差である.目盛りの誤読や記帳,計算の 誤りであり,これは複数の人により十分注意し, 計算をくり返すなどにより発見,除去できる. ② 定誤差:定誤差は,原因が明らかで,ある条件の もとでは常に一定の質と量の誤差を生じるもので ある.定誤差は,個人的なもの,器械的なもの,
物理的なものがあり,その原因と状態を調べるこ とにより理論的に取り除くことが可能である.例 えば,温度変化による測尺の伸び縮み,目盛りの 不正,視準軸の不備に起因するものなどで,計算 や測定方法の工夫によって除去できる. ③ 偶然誤差:偶然誤差は,原因が明らかでなく,定 誤差や過誤を取り除いても,なお残る小さな誤差 で,その誤差の符号や大きさがランダムであるも のをいう.これを全く無くすることはできない. 誤差理論で用いられる誤差という用語は,特に断ら ない限り偶然誤差を意味し,過誤や定誤差が取り除か れた値を単に測定値と呼ぶことにすれば 誤差=真の値-測定値 である. 一方,精度は,誤差とは逆の表現であり,相対誤差 とも呼ばれる.例えば,1m の長さを測り,2mm の誤 差がでたとすると,精度は 2/1,000=1/500 のように 分子が1 の分数で表した値で示す.したがって,誤差 が明らかになれば精度は自ら定まるが,現実には真の 値は知り得ないので,厳密には誤差や精度はその近似 値ということになる. 1.9 測量の工程 誤差を出来る限り少なくし,目的を十分満たした結 果を得るためには,次の点に配慮して適切な器械や方 法を選定し,測量を実施することが大切である. ① 測量の目的および精度 ② 土地の広さおよび状況 ③ 所要時間および経費 など そして,測量の工程は一般に,図 1-9 のような順序で 行われる.踏査・選点とは測定に先立ち,あらかじめ測 量区域内を歩いて,その地勢に応じ,最小の労力・費用 および時間で測量を終わらせるために,測点場所や測量 の方法などをおおよそ決定する作業をいう. また,作業を行う場所によって,外業(野外で測定す る作業)と内業(室内で製図に必要な種々の計算を行い, 図面や設計書などを作る作業)に分けられる. 図 1-9 測量の工程 最終的な測量の結果は,①器械の精度,②測定の精 度,③計算の精度,④図解の精度 などに影響される. したがって,器械の性能を十分に知り,定誤差が消去 されるような測定を行うことが必要である.そして, 計算に測定値の有効数字をはるかに超えた桁数を取っ ても無意味である.さらに,図示する場合に,例えば 0.1mm の大きさが図化の限度とすると,縮尺 1/1,000 では実長 10cm の大きさを示すことが出来るが,それ 以下のものは示すことが出来ない.このように,それ ぞれの精度を考慮して測量することが肝要である. 建設の分野では,以上のような一般的な地物の測量 のほかに,工事実施に並行して,その基準となる点・ 面・高さを現場に標示する,いわゆる工事測量(または 測設ともいう)が行われる. 第2章 測量の基本 2.1 角の測定 (1) 概要 測角は測距とともに測量における最も基本的な事項 である.角を精密に測定するためには,経緯儀(トラン シットやセオドライト)が用いられる.トランシットと セオドライトの構造はほとんど同じであるが,前者は 角度の読み取り装置がバーニア読み,後者はマイクロ 読みとなっているものが多い. トランシット(セオドライト)は,主として水平角や 鉛直角を精密に測定する器械であるが,スタジア線に よる距離の測定や高低差の測定も行うことができる (2.5 参照) 主要構造は,図 2-1 に示すように大別して上部と下 部に分けられる.上部は視準線をもつ望遠鏡,これを 回転させる水平軸と鉛直軸およびこの角軸の回転角を 測るための目盛盤が付いている. 下部は,器械本体の傾きを示す気泡管とこの傾きを 調整する整準台および底盤からなっている.望遠鏡は 倍率25~30 倍程度のものが多い.望遠鏡の接眼レンズ を覗くと,視野には図 2-2 に示すような目標の位置を 正確に視準するための十字線が設けられている.目標 物の像の焦点と十字線の焦点は,それぞれ別の合焦ね じによってあわせるようになっている.また,各回転 軸には締め付けねじと微動ねじが対になって備えられ ている.すなわち,大きな回転でおおよその位置を決 めるときに締め付けねじを使い,小さな回転で正確な 視準位置を決めるときに,微動ねじを使うのである.
図 2-1 トランシット(セオドライト) 図 2-2 各種の十字線 図 2-3 バーニア読み 図 2-4 マイクロ読み 目盛りの読み取り装置は,上述のように ①バーニア読み方式 ②マイクロ読み方式 の2 通りがある.図 2-3 はバーニア読み方式の例で, 主尺と副尺(これをバーニアという)からなる.この場合 の主尺の最小目盛は 20′であるが,バーニアにより 20″まで読み取ることができる.図 2-4 はマイクロ読 みの目盛視野の例である. 測角は,視準線の回転に応じて目盛りを進める上部 運動と,目盛りを止める下部運動によって行う.望遠 鏡が鉛直目盛盤の右側にあるとき正位,望遠鏡を180° 回転して鉛直目盛盤の左に位置するとき反位という. 正位と反位による測定をすれば,器械の調整の不完全 などによる定誤差が消去できる. (2) 測角の方法 a. 水平角の測定 水平角の測定方法には,以下に示す単測法,倍角法, 方向法および全角法(角観測法ともいう)がある. ① 単測法:図 2-5 において,測点O に器械の鉛直軸 を通る線がくるように配置し(この操作を求心とい う),器機を水平にする(この操作を整準と呼ぶ). 下部運動により望遠鏡の視準線をA 点に合わせ, 目盛りを読み取る(始読).次に,上部運動により B 点を視準し,目盛りを読み取る(終読).これを正位 (時計回り)の測定いう.次に,望遠鏡を水平軸回り に反転して,上部運動により B 点を視準し,B 点 から A 点に測角する.これを反位(反時計回り)の 測定という.正反あわせて一対回といい,各々の 測定値を平均する. 図 2-5 単測法 ② 倍角法:図 2-6 のように,上盤を固定して下部運 動によりA 点を視準し,このときの目盛 a0を読み 取る.次に,上部運動により B 点を視準し,目盛 a1を読み取る.上盤を締めて再びA 点を視準する. そして,下盤を締めて再び B 点を視準すると,2 回分狭角(2 倍角という)が累加されたことになる. このようにして,2,3,4…n 倍角を測定する.倍角法 は n 回分の狭角を累加させ,その結果から得られ た測定値を n で割り,読み取り精度を高めようと するものである. 図 2-6 倍角法 ③ 方向法:図 2-7 のようにまず,OA の方向を基準と して,時計回り(正)に AB,BC,CD を測ったら, OD の方向を基準として,反時計回り(反)に DC, CB,BA を測る.これを 1 対回とする.1 点に多く 角が集まるときに使われ,3 対回以上行う.
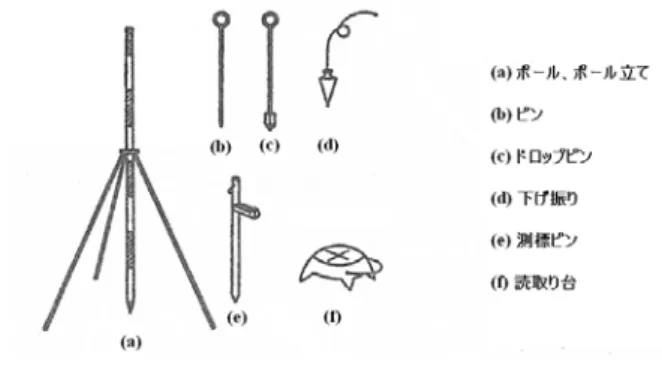
図 2-7 方向法 図 2-8 全角法 ④ 全角法:図 2-8 のように,2 つの視準方向により作 られる角の全てを個別に正位と反位で測ったもの を1対回とする.測定方向が n であるとき,角の 総数N は,N=n(n-1)/2 となる.この方法は,最も 精度の良い方法で,一等および二等三角点やダム サイト変位測定などに用いられる. 許容誤差は,表 2-1 のように定められている.測定 差とは各対回の差(較差)の最大値と最小値の差をいい, 倍角差とは正位と反位の測定値の和の最大値と最小値 の差である. b. 鉛直角の測定 天頂よりの角(天頂角)を測る場合と水平面よりの角 (高度角;見上げる角を仰角,見下ろす角を俯角という) を測る場合がある.正位と反位の測定を行い,その差 が制限以内であれば,その平均値をとる.鉛直角は, 水平を基準とするため器機の十分な調整が必要である. 表 2-1 基準・補助多角測量の各測定の制限 測量種別 測器種 測 定 差 倍 角 差 鉛 直 角 定数 適用 2 秒読 15″ 30″ 20″ 12 秒読 30″ 42″ 42″ 基準多角測量 補助多角測量 20 秒読 50″ 60″ 60″ 路線狭角, 三角形,三 角鎖,多角 交 会 点 に 適用 測かん(桿) 1 秒読 6″ 8″ - 特例 直交基準法 12 秒読 24″ 36″ 42″ 特例 図 2-9 鉛直角 2.2 距離の測定 (1) 概要 測量において距離と言えば,一般的に水平距離を指 す.起伏の多い長い距離を精密に測定することは,大 変困難であったが,近年のエレクトロニクスの進歩に よって電磁波測距儀が開発され,高精度で求めること が可能になってきた.しかし,従来から使用されてい る巻尺は,簡単な調査やあまり精度を要しない測距の 道具として,現在でも手軽で便利なものである. 測距の許容精度は土地の状態・目的などによって異 なるが,地形と土地利用状態によって区別すると概略 次のようである. 山林・森林 1/500~1/1,000 平坦地・農耕地 1/2,500~1/5,000 市街地 1/1,000~1/5,000 一方,使用器機によって期待できる精度は異なるが, 以下のようである. ① 布巻尺(精度 1/500~1/2,000):麻布に銅の細い針金を 織り込んだ帯材(幅 15mm 位)に 5mm 単位の目盛り を施したもので,全長20~50m のものが多い. ② ガラス繊維尺(精度 1/1,000~1/5,000):3 万本以上の ガラス繊維を平行に並べて外側を塩化ビニールで 被覆した帯材に目盛りを施したもので,耐水性に 優れている. ③ 鋼巻尺(精度 1/5,000~1/100,000):幅 10~50mm,長 さ10~50m の帯状の鋼面に mm 単位の目盛りが刻 まれている. ④ インバー巻尺(精度 1/100,000~1/1,000,000):特殊ニ ッケル鋼で作られたもので,熱膨張係数が鋼の約 1/10 程度小さく帯状または線状として精密な基準 測量に用いられる. ⑤ 光波測距儀(誤差 10mm+D×(1~2)×10-6,D は測定距 離):1 点から強度変調した光を送り,発射光と他 地点で反射して返ってくる反射光との位相差を測 定し,距離を算出する器械である. ⑥ 電波測距儀(誤差 30mm+D×(3~4)×10-6,D は測定距 離):測定距離の両端に主局と従局を設置し,主局 においてマイクロ波を発受信し,従局で再発射し, 位相差を測定し,距離を算出する器械である.光 波測距儀と電波測距儀を総称して電磁波測距儀と いう. 以上のほか,過去には鉄製のチェーン,竹尺,測量 縄などが用いられていた. 図 2-10 巻尺 図 2-11 光波測距計と反射プリズム
図 2-12 測距のための補助器具 (2) 巻尺による距離測定 一般の巻尺によって距離を測定するには,前手,後 手,記帳手およびポール手の4~5 名を要する.前手は 巻尺の一端を持ち,後手に先だって前進する者,後手 は巻尺の他端を持ち前手に追従する者,ポール手は各 測点上にポールを立てる係,記帳手は得られた結果を 野帳(Field Note)に記入する係である. a. 平坦地の測距法 平坦地にあるA,B 間の距離の測定は以下のように行 われる.普通,前手と後手が交代した往復2 回の測定 値の相加平均をとるのが原則である. 巻尺の長さを 1 測長といい,測点間の距離によって, 次のようにして測定を行う. ① 測点間の距離が1 測長以内の場合:後手は前手と 呼応して巻尺に屈曲がないように数回波打たせて 十分に張り,A 点上の巻尺の目盛り(巻尺の零また はその付近)と B 点上の目盛りを読み,記帳してそ の差を計算する. ② 測点間の距離が1 測長以上の場合:測点の両端に ポールを立てておき,前手はポールと測量ピンを 持ち,直線に沿ってほぼ巻尺の長さだけ前進し, そこにポールを立てる.記帳手は図 2-13 のように, このポールの鉛直を正しつつ正確に見通し線内に 誘導する.ポールを正しく見通し線内にいれたな ら,正しく巻尺の先端部に測量ピン(あるいは指標 板)を置く.巻尺を 1 回張るごとに前手は測量ピン 等を置いて進み,後手はこれにしたがって進んで, 測量ピン等の地点で次の区間の測定を行う.この 操作をくり返す. b. 傾斜地の測距法 傾斜地での水平距離の測り方には,次の方法がある. 一般に,降測法の方が精度は高い. ① 降測法:図 2-14(a)に示すように,傾斜地を降りる 方向に測る方法で,後手は B に巻尺の零を合わせ 前手はポールに添えた巻尺を水平に張り,その先 端から下げ降りを地面に下ろして印を付けて,こ の点(D)を次の操作の後点として以上の操作をく り返す. ② 登測法:図 2-14(b)に示すように,前手が巻尺の零 を地上に接触させて,後手は巻尺を水平に張り, 後点に鉛直に立てたポールを切る巻尺の目盛りを 読む. 図 2-14(a) 降測法 図 2-14(b) 登測法 c. 精密な測距法 鋼巻尺を用いて1/10,000 以上の精度を得ることがで きるが,以下にその方法について述べる(図 2-15). 図 2-15 精密な測距法 巻尺の全長より少し短い区間 AB を大体等しい小区 間に分割し,各分点に支杭を千鳥の形に打ち,その内 側に巻尺の幅より少し長い釘を等しい高さにそろえて 打ち,これに巻尺を保持させる.点 A,B には測点杭 と呼ばれる杭を打ち,その頭部をそろえて水平に切り 落とし,上部に厚紙などを貼り,真中に読み取り線を 引いておく.巻尺の両端には張力計(スプリングバラン ス)を通して張力が働くようにし,中間の 2 点に巻尺用 温度計を掛ける.A 点の後手と B 点の前手は同時に, なるべく所定の張力(ふつう 10kgf)で引っ張る.合図に より同時に A 点(始読)と B 点(終読)の読みと温度およ び張力を記録する.両端の読みは0.1mm までを読み取 る.測定は偶数回行い,個人誤差を消去するために毎 回各々の読み取り係を交替する. また,各測定値は以下に示す補正を施したのち平均
する. ①温度補正 温度補正量Ct=+α(t-t0)L ここに,α:熱膨張係数(≒1.2×10-5) t :測定時の温度(℃) t0:標準温度(℃) L :測定距離(m) ②張力補正 張力補正量CP= 0 (P- P ) L AE + ここに,P :測定張力(kgf) P0:標準張力(kgf) A :巻尺の断面積(cm2) E :鋼の弾性係数(≒2.1×106kgf/cm2) ③たるみ補正 たるみ補正量CS= 2 2 2 d L 24 P w − ここに,w :単位長さ当たりの重さ d :支点間の距離(m) ④特性値補正 特性値補正量CC= sL δ + ここに,s :巻尺の全長(m) δ:特性値(m) ⑤傾斜補正 傾斜補正量Cg≒ 2 2 2 h h L 2 L 2 L − = − ここに,h :高低差(m) ⑥標高補正 標高補正量Ch≒ H L R − ここに,H :平均標高(m) R :地球の半径(≒6,370×103m) 【距離の補正に関する例題】 点A から点 B まで,一様な傾斜の道路上で 50m 鋼巻 尺による測距を行い,斜面に沿った測定値として L= 672.635m を得た.測定中の温度 t=24℃,張力 P=15kgf, 高低差 h=12.340m であった.また,鋼巻尺の特性値 δ=-8.2mm , 熱 膨 張 係 数 α=1.2×10-5 / ℃ , 弾 性 係 数 E=2.1×106kgf/cm2,単位長さ当たりの重さw=0.0485kgf/m, 単位重量は0.00785kgf/cm3,標準温度 t 0=15℃,標準張 力P0=10kgf であるとするとき測定値を補正せよ. 【解】 まず,温度補正量を計算すると Ct=+α(t-t0)L=1.2×10-5 ×9×672.635≒0.073 次に,張力補正量を計算すると CP= 0 (P- P ) L AE + =5×672.635/(0.000485/0.00785×2.1×106) ≒0.026 したがって,温度・張力補正を施した後の長さL1は L1=672.635+0.073+0.026=672.734m 次に,特性値の補正を行った後の長さL2は CC= sL δ + =-0.0082×672.734/50=-0.110 だから L2=672.734-0.110=672.624 m となり,この値を用いて傾斜補正を行った後の長さ L3 は L3=672.624-(12.340)2/(2×672.624)=672.511 m となる. 【問題】 点A から点 B まで,一様な傾斜の道路上で 30m 鋼巻 尺(+0.005)による測距を行い,斜面に沿った測定値とし てL=365.138m を得た.テキスト(P8)の例題と同じ条 件の下に測定値を補正せよ. 2.3 角と距離の同時測定 (1)平板測量 a.概要 平板測器は,図 2-16 に示すようなもので,測点上に 図面を設置し,任意の方向の測線,すなわち角を図面に 描きとることができる.距離は巻尺や光波測距器などで 測定し,図面の縮尺に直して実物の形に対応する相似形 を得る.平板は,上面が図紙を貼るように平らになって おり,裏面の金具に整準ねじの付いた三脚が取り付けら れる.アリダードは,両端に目標の方向を視準するため の金属製の前・後視板,中央に気泡管(水準器)および側 面に定規が備えられている. 平板を据え付ける際,次の3 条件を満足させなければ ならない. ①整準:図 2-17 のように,平板を測点上に置き,三脚 および整準ねじによってアリダードの水準器の気泡を 互いに直角の方向で常に中央にくるようにする. ②求心(致心):求心器と下げ振りによって,地上の測点 とそれに対応する図面上の点を同一鉛直線上にあるよ うにする.
③標定(定位):図面に描かれたすべての線が,これに対 応する実際の線と同じ方向になるように平板を向ける. これらの操作を一通り行って,3 条件を満足させたつ もりでも,どれかがくるうことが多く,幾度かくり返し て3 条件を満足させる. 平板測量は,器材も簡素で軽量のため土木・建築技術 者が手軽に利用できるもので,大縮尺(1/200~1/500)の局 地的な地図を作成するのに適している. b.測定法 平板測量には,放射法,道線法および交会法等がある. 放射法は,図 2-18 に示すように,O 点より各測点を 視準するとともに,各測点までの距離を測定し,図上に a,b,c,d,e を描く方法である. 道線法は,図 2-19 に示すように,まずA 点に平板を 据え(整準・求心),前方を視準し,測長し,図上に ab を 描く.前進して,B 点に平板を据え(整準・求心),A 点を 視準し,ab 上にあることを確かめて(標定),前方 C を視 準して,測長し,図上にc を描く.以下同様にして前進 していく. 交会法には,前方交会法,側方交会法,後方交会法の 3 種類があるが,後述する. (2)トータルステーション トータルステーションは,光波測距儀と電子式セオドラ イトとを単一器械として組み込んだ装置であり,機器の 歴史的発展経緯から電子式タキオメータともいう.測角・ 測距の測定値がデジタル表示・記録処理することができ, 大幅に作業の省力化や能率化が可能となっている.測 角・測距は,本体から見える求点に反射鏡を置いて測定 を行い,反射鏡までの距離,基準方向よりの水平角,鉛 直角が直接求められる.これらの測定は,望遠鏡の同一 視準軸で行われるので,一回の視準でよく,測定値も自 動で読み取られ,従来の野帳に代わり,電子野帳(デー タコレクタ)に直接記録される. トータルステーションの例を図 2-20 に示すが,測定 値や計算結果を表示する表示部,様々な測定を選択・開 始させたり,計算のための数値を入力するためのキーボ ード部,測角・測距のための望遠鏡および電子的測定装 置および従来のセオドライト同様の整準,求心装置など からなっている.測定された斜距離を鉛直角によって水 平距離と高低差に変換する機能は,トータルステーショ ンとして基本的な演算処理であるが,これ以外にも次の ような応用計算機能が付加されている. a.座標計算機能:器械点の座標を設定しておけば,測定 点のX,Y,Z 座標が計算,表示される. 図 2-16 平板測器 図 2-17 整準 図 2-18 放射法 図 2-19 道線法 図 2-20 トータルステーション 図 2-21 トータルサーベイシステム b.測設機能:基準距離をキー入力することにより,測距 値との差を表示する.
c.対辺測定機能:任意の 2 点間の狭角と器械からの距離 を測定することによって,2 点間距離と高低差を求める ことができる. d.リモートエレベーション機能:直接プリズムを設置で きない頭上や下方の測点のほぼ真下もしくは真上にプ リズムを設置し,器械とプリズム間の距離を測定してお き,その後望遠鏡を上下に振って測定点を視準すれば, このときの鉛直角によってプリズムからの高さを計算, 表示する. トータルステーションは,本来トラバース測量用に開 発されたものであるが,三辺・三角測量,水準測量によ る横断測量と土工量の測定,路線測量の中心杭の設置, 3 次元的地形点の測量と画像への展開,平面測量の自動 化,写真測量の補測点測量など,3 次元的位置を求める 機能を発揮させ,またトータルサーベイシステムと併用 させることによって多方面への利用が広がっている. 2.4 高低差の測定 (1) 概要 地表の高低差を測ることを水準測量と呼んでいる. 高低差は,水準儀(レベル;Level)を用いて 2 点間に立 てた標尺(スタッフ;Staff)の目盛りを読み取り,その差 によって求められる. 従来からの光学系のレベルは,構造上から気泡管レ ベルと自動レベルに分けられる.気泡管レベルには,Y レベル,ダンピーレベル,ティルチングレベルなどがある. 近年は,自動レベルがよく用いられている.ティルチ ングレベルや自動レベルの中で,標尺の読みが0.01mm まで読み取れるものを精密レベルと呼ぶ.一方,エレ クトロニクスの発達によりレーザーレベルや光波プレ ーナーが開発されている.前者は,光学系では不利な 地下や夜間の測量などにも活用され,後者は,回転式 レーザ発光器により 150m 以内の同一平面を測定する ことができるので,大型ビルのサッシの位置決めなど に用いられる. 図 2-22 に自動レベルの断面を示すが,望遠鏡に,水 準器と整準器が付属した支承部に三脚を取り付けて使 用する.鉛直軸回りの回転を固定する締め付けねじと 微動ねじを備え,望遠鏡の視野には十字線の上下にス タジア線が設けられている.標尺は,白松,モミ材,ア ルミニウム等で作られ,普通箱形の断面をしているの で,箱尺とも言う. (2) 測定方法の原理 図 2-23 のように,A 点,B 点のほぼ中央にレベルを 図 2-22 自動レベルの断面 図 2-23 水準測量の原理と標尺の読み 据え付け,各点上に立てた標尺を視準して,その読み hAおよびhBを得たとすれば h=hA -hB である.A 点の標高(HA)がわかっていれば,B 点の標 高(HB)は HB=HA+h である.この場合のように,進行方向のB 点を視準す ること,あるいはその標尺の読みを前視(FS;フォアサ イト)といい,A 点を視準すること,あるいはその標尺 の読みを後視(BS;バックサイト)という. また,望遠鏡の視準線の標高を器械高(IH)という. 図では 器械高(IH)=HA+hA である.なお,高低差を求める 2 点が遠く離れている 場合は,何度もレベルを移し替えて,前視と後視をと るためのもりかえ点(TP)をいくつか設定する.これに対 して,付近の標高だけをとるような点を中間点(IP)とい う.もりかえ点で連絡された路線を水準路線と呼び, これが網状に組み合わされたものを水準網と呼ぶ. (3) 測定の方法 測量の手順は,次の通りである. ① 測量区域を踏査し,もりかえ点,レベルの位置を あらかじめ大体の見当をつけておく.このとき, 見通し,地盤の状態,地形の変化などに注意する.
② 標尺手は,A 点に標尺を立て,垂直に保持する. 標尺に簡単な水準器が付いている場合は,これを 利用するが,ない場合に垂直に立てるには,姿勢 を正しくし,標尺の重心より上で両手を側面にあ てて,わずかに持ち上げて浮かし,そのまま静か に下ろす. ③ 地盤の堅固な点にもりかえ点を設けて,もう 1 つ の標尺を立てる. ④ レベルを両標尺間のほぼ中央に据え付ける. ⑤ レベルの気泡が中央にあることに注意しながら,A 点の標尺を視準し,その読み(後視)をとる. ⑥ 望遠鏡を水平に回転させて,もりかえ点に立てた 標尺を視準し,その読み(前視)を取る. ⑦ A 点の標尺を移動し,次のもりかえ点に標尺をた て,この中間にレベルを据え付け,後視・前視を とる.この操作をB 点までくり返す.必要なら,B 点からA 点までの復路を同様の方法で測定する. 視準距離(器械から標尺までの距離)は,レベルの性 能,天候,測定者の視力などにより一定でないが,大 体20~80m 程度に選べばよい.後視・前視への視準距 離を等しくとれば,視準線が水平でないために生じる 誤差は消去され精度はよくなる.視準は,接眼鏡の視 度調節環を回して,十字線が明瞭に見えるように調整 した後,望遠鏡を標尺に向け,焦点ねじで標尺にピン トを合わせ,微動ねじで十字線を視野の中央に導く. 標尺の目盛りを読むときに,視差(パララックス)が生じ ることがある.すなわち,接眼鏡を覗いたまま眼を少 し上下左右に動かすと標尺の読みに変化が起こること があり,これが生じていないかを確かめる必要がある. また,標尺の読みに正確を期するためには,標尺を視 準方向に対して前後に動かせて,読みの最小値を採用 すればよい. 野帳の記入方法には ① 昇降式:中間点(IP)が少ないとき便利な方法 ② 器高式:中間点(IP)が多いとき(横断測量等)に用い るとよい方法 がある.昇降式と器高式の野帳記入例を表 2-2(図 2-24 に対応)と表 2-3(図 2-25 に対応)にそれぞれ示す. 図 2-24 水準測量の断面模式図(昇降式) 表 2-2 昇降式野帳記入例 前視 測点 距離 (m) 後視 BS (m) TP IP 昇降 (m) 地盤高 GH(m) 補正 値 (m) 調 整 地盤高 (m) A 0.473 60.864 60.864 B 54 0.749 1.928 -1.455 59.409 -0.001 59.408 C 38 0.819 1.873 -1.124 58.285 -0.002 58.283 D 36 0.942 1.794 -0.975 57.310 -0.003 57.307 E 40 1.498 1.306 -0.364 56.946 -0.004 56.942 F 48 0.807 0.512 0.986 57.932 -0.004 57.928 G 30 2.539 1.199 -0.392 57.540 -0.005 57.535 H 40 2.030 0.764 1.775 59.315 -0.006 59.309 A 46 0.474 1.556 60.871 -0.007 60.864 計 332 9.857 9.850 A 点から出発し A 点に戻ったのであるから,60.871-60.864=0.007 の誤 差となる.後視の計 9.857 と前視の計 9.850 の差も 0.007 であるので補正 値 は 距 離 に 比 例 し て 配 分 す る . 0.007 × 54/332 ≒ 0.001 , 0.007 × (54+32)/332≒0.002,…. 図 2-25 水準測量の平面模式図(器高式) 表 2-3 器高式野帳記入例 前視FS(m) 測点 距 離 m 後視 BS(m) 器高 IH(m) TP IP 地盤高 GH(m) 補正 値(m) 調 整 地盤高 (m) BM1 1.728 61.023 59.295 59.295 ② 1.453 59.570 59.570 ③ 1.328 59.695 59.695 ④ 0.825 60.198 60.198 ① 72 1.203 61.302 0.924 60.099 0.004 60.103 ⑤ 1.325 59.977 0.004 59.981 ⑥ 1.538 59.764 0.004 59.768 ⑦ 0.895 60.407 0.004 60.411 BM2 47 1.173 60.129 0.006 60.135 計 2.931 2.097 BM1 の地盤高 59.295 と BM2 の地盤高 660.135 は既知である.測定によ ると BM2 の地盤高は 59.295+2.931-2.097=60.129 となる.誤差は 60.135-60.129=0.006 であるので,補正値は距離に比例配分して,測 点①⑤⑥⑦に対して 0.006×72/(72+47)≒0.004,BM2 に対しては 0.006 を加える. (4) 水準測量の誤差と精度 水準測量の誤差と精度は,レベルの種類,天候の状 態などによって異なる.誤差には次のようなものがあ る. ① 器械・器具による誤差 (1)レベルの調整不完全:前視・後視の視準距離を等し くする. (2)標尺の目盛りの不完全:標準尺と比較し補正する. ② 視準時の誤差 (1)焦準の不完全(視差):接眼鏡を調整して,十字線を はっきりだす.合焦ねじを調整して像を正しく十字線 面に合わせる. (2)気泡が正しく中央にない:中央に合わせる.器械を 180°回転させて移動する場合は,移動量の半分を整準 ねじで寄せ,残りの半分は気泡管調節ねじで移動させ て調整する.
③ 取り扱い誤差 (1)レベルの沈下:地盤に留意する. (2)標尺の沈下:地盤に留意する.標尺台等を利用する. (3)標尺の傾斜:正しく垂直に立てる. (4)標尺の継目の不完全:点検しておく. その他,自然現象による誤差などが考えられる. 一方,一定の距離当たりに生じる偶然誤差は,器械 の据え付け回数が増せば大となる.したがって,勾配 が急なところでは,平坦なところよりも据え付け回数 が増し,精度は低下する.また,視準距離がある長さ 以上になると標尺の読みの誤差が急に大きくなり,精 度は低下する.同一器械で,同じ条件で適当な方法で 測定すれば,誤差は距離の平方根に比例して大きくな ることがわかっている. 一般に,水準測量の許容誤差(E)は,1km についてレ ベルの据え付け回数が一定ならば,E C D= となる. ただし,D は全測線長(km)で,C は 1km 当たりに許さ れる誤差であって, C=50mm:山間地であまり精度を要しない場合 C=10mm:平地であまり精度を要しない場合 C=2mm:平地で高い精度を要する場合 である. 2.5 距離および高さの簡易測定 (1) スタジア測量 セオドライト(トランシット)やレベルの十字線の上下に張 られたスタジア線を利用して目標までの距離や高さを 計算によって求める測量である.距離や高さを巻尺や レベルで直接測定した値に比べるとかなり精度は劣る が,作業は簡単で非常に早くできる.この測量は主と して細部測量や地形測量などのあまり高精度を必要と しない測量や本測量に先立つ予備的な測量などに利用 される. a. 視準線が水平な場合 前方に立てた標尺を視準して,上下のスタジア線の 示す目盛りを読み,スタジア線に挟まれた長さ l を求 めれば,器械から標尺までの距離D は,以下のように して求めることができる.図 2-26 において S:l=f : i S=f×l/i ∴ D=f×l/i+f+c ここで,K=f/i,C=f+c とおけば, D=K×l+C となる.これをスタジア公式という.K を乗定数,C を 加数というが,一般に,K=100,C=0 としたものが多 い. 図 2-26 スタジア測量の原理 b. 視準線が傾斜している場合 図 2-27 のように B 点に立てた標尺を視準して,上 下のスタジア線の示す目盛り(挟まれた長さ l),鉛直角 v および器高 I を測定し,AB 間の水平距離 D,高低差 H は以下のように求めることができる. D=Kl cos2 v+C cos v
H= Kl cos v sin v+C sin v+I-m
図 2-27 視準線が傾斜している場合のスタジア測量 (2) 平板のアリダードを利用する方法 平板のアリダードの視準板には,図 2-29 のように前・ 後視板の間隔の 1/100 を 1 単位とした目盛りが刻んで あり,これを利用して高さや距離を求めることもでき る. 図 2-28 において点C を視準して測定した目盛数を n とし,距離L を実測すれば,高さ H は次のようになる. n:100=H:L ∴ H=nL/100 また,図 2-30 において点C および点 D を視準して, 測定して得られる目盛りの読みをそれぞれ n1,n2とす る.CD 間の高さを h とすれば,距離 L は,次のよう にして求められる. H1=n1×L/100,H2=n2×L/100 h=H1-H2=(n1-n2)L/100 ∴ L=100×h/(n1-n2) 図 2-28 高さの測定 図 2-29 視準板の目盛
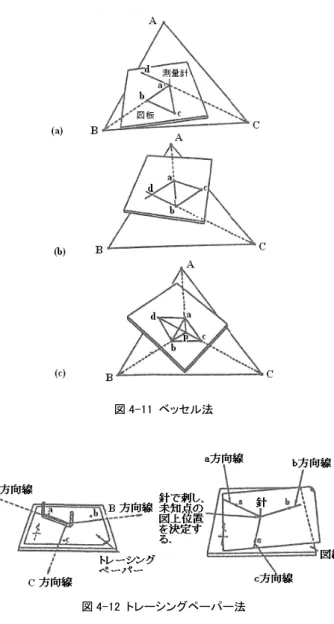
図 2-30 距離の測定 第3章 基準点測量 3.1 概要 基準点測量とは,基準点を設置するための測量をい うが,基準点はこれをもとにして細部に至る点の位置 を定めるので,精度の高いものでなくてはならない. 基準点によって測量網が形成されるが,その典型的な 例が,国の行っている一等三角網であり,一等水準路 線網である(図 3-1).前者は,経度・緯度(水平位置)を 決めることを主目的としたもので,後者は高さを決め ることを目的としたものである. 測量の方式に着目すると,基準点測量は以下のよう に分類できる. ① 三角測量 ② 三辺測量 ③ トラバース測量 ④ 水準測量 以前は,三角測量が主体であったが,電磁波測距儀 が出現してからは三辺測量やトラバース測量がより多 く用いられるようになった. 図 3-1 一等水準路線網(左)と一等三角網(右) 3.2 三角測量 (1) 三角測量の原理 三角測量は,三角網の最小単位である三角形の全て の内角を経緯儀(トランシット,セオドライト)で測定 することにより,基準点の位置を求める測量である. 網の大きさを決めるために少なくとも 1 つの辺を基線 として選び,精密に測定する. 図 3-2 の三角形において,基線をAC(辺 b)とし,測 定した3 つの角α,β,γとして正弦定理
sin sin sin
a b c α = β = γ により, sin , sin sin sin b b a α c γ β β ⋅ ⋅ = = となる. 図 3-2 三角測量の原理 三角測量の作業は,一般に ①選点・造標,②基準長 測定,③角測定,④調整計算,⑤辺長計算,⑥作図 の ように進められる. (2) 三角測量の計算手法 三角網を一意的に決めるための幾何学的条件には, 次の3 つがある. ① 角条件式:三角形の内角の和が 180°であるという 条件 ② 辺条件式:三角網の 1 つの辺から正弦定理によっ て,次々と辺長を計算し,最後に元の辺にもどっ たとき最初の辺長と等しくなる条件 ③ 辺長条件式:基線が 2 つ以上ある場合,第 1 の基 線から正弦定理によって計算していき,第 2 の基 線の長さを求めて,既知の辺長と等しくならなけ ればならないという条件 図 3-3 において,角条件式は α1+α2+α6=180° α3+α4+α5=180° α7+α8-α5=0° であり,正弦定理にしたがって,AB から BD,BC, AB の順に辺を求めると,最初の AB と最後の AB が等 しいという条件から以下の式を得る.これが辺条件式 である. 7 4 6 1 1 3 8 6
sin sin( )sin
1
sin( )sin sin
α α α α α α α α + = + 図 3-4 において,S1から正弦定理にしたがって,次々 と辺長を計算していき,最後に ED の長さを得る.こ れがS2と等しいという条件から,以下の辺長条件式を 得る.
図 3-3
1 2 5 7 10
2 3 6 9 12
sin sin sin sin
sin sin sin sin
S S
α
α
α
α
α
α
α
α
= 次に,四等三角測量で使われてきた座標の簡略調整 計算法について示すが,これは複数の既知点から1 つ の新点を求める場合の計算法である. 図 3-5 は,3 つの既知点 P1,P2,P3から新点Q を求 める例である.まず,既知点の座標値および既知点に おける方向角を使って,Q 点から既知点までの距離の 仮想値S1,S2,S3を求めておく.次に,既知点P1から Q 点への方向角 β1,β2,β3 を使って,座標北を基準と したQ 点から各既知点への方向角の仮想値 T1,T2,T3 を計算する.すなわち T1=t1-180°,T2=T1+β2,T3=T1+β3 測定に誤差がなければ,T2=t2-180°および T3=t3- 180°であるが,一般にはそうはならない.そこで, T1′=T1+Z ,T2′=T2+Z,T3′=T3+Z ここで,Z={Σ(Ti-ti+180)}/3 とする.これは,Tiの 平均と(ti-180)の平均が等しくなるように Tiを修正し たことに相当する. 次に,Tiとtiを使って t1′={t1+(T1′-180)}/2 t2′={t2+(T2′-180)}/2 t3′={t3+(T3′-180)}/2 を求める.以上で,各既知点から新点Q への方向角の 平均値が得られたことになり,ti′と Siから各既知点を 基準としてQ 点の座標値が求められる.Piの座標値を xi,yiとし,Piから求めたQ の座標値を xi′,yi′とするとxi′=xi+cos (ti′),yi′=yi+sin (ti′)
のように,3 組の Q の座標値が得られる.この 3 組の 平均値を求めて,最確値(x,y)とする. 図 3-4 図 3-5 3.3 三辺測量 三辺測量は,電磁波測距儀の普及に伴って出現した 比較的新しい測量方式で,測距儀のみを用いるもので ある.我が国では,1974 年から第 3 次基本測量長期計 画に採用され,最近では高精度を必要とする地震予知 のための1 次基準点測量などに,従来の三角測量に代 わって用いられている. 三辺測量の対象となる三角網は,三角測量のそれと 同様であるが,三角測量より1 桁の精度の向上が見ら れる. 既知点か各測線長を測定し,新点の座標を計算して, 次々と決めていく.この際,コンピュータを用いて観 測方程式による厳密調整計算を行うのが普通である. 図 3-6 のような有心三角形について,a~f の辺を測 定した場合,中心点D の回りの α,β および γ の 3 つ の角は測定辺長から計算できる.すなわち,第2 余弦 定理を適用すると次式を得る. 2 2 2 2 2 2 2 2 2 cos ( ) /(2 ) cos ( ) /(2 ) cos ( ) /(2 ) c b a bc e c d ce b e f be
α
β
γ
= + − = + − = + − 三角形が平面上にあれば,α+β+γ=360°である ので,次の閉合差(ε)によって,作業現場で測定値の良 否を点検できる. ε=α+β+γ-360° 図 3-6 三辺測量の原理3.4 トラバース測量 (1) トラバース測量の原理 トラバース測量は多角測量とも呼ばれ,既知点と新 点とを折れ線で連結し,測線長と水平角を測ることに より新点の座標を求めるものである.測距に巻尺を用 いる限り作業能率などの面で三角測量を超えることは なかったが,1960 年代に光波測距儀が出現し,普及し たため,基準点測量の手法として有利な測量方式とな った. トラバース測量は,原則として既知三角点を結合す る結合トラバースと,始点から一周して始点に戻る閉合 トラバースが使用されるが,図 3-7 に示すように開トラ バース,閉合トラバース,結合トラバース,トラバース 網がある. トラバース測量の手順は三角測量の場合とほとんど 同様である.測距は鋼巻尺や光波測距儀で行い,測角 は,セオドライト(トランシット)で行う.測角の測定 方法には①交角法,②偏角法,③方向角法があるが, 一般に交角法が用いられている. 交角法は,閉合トラバースの場合,多角形の内角を 測定する場合と外角を測定する場合があるが,一般に は内角を測定することが多い. 偏角とは,前の測線の延長線と次の測線との間の角 のことで,基準とした延長線より右回りに測る偏角を 正(+),左回りを負(-)の符号をつけて表す. 方向角法は,それぞれの測線の方位角(北を基準とし て右回りに測る角)を直接測定っていく方法である. トラバース測量で,角を測定した場合,次のようにし て,誤差を発見し点検する. a.交角法の場合:n 角形の内角の和は(n-2)×180° であるから,誤差ε1は,各測定値をα1α2…αnとする と以下のようになる. ε1=(n-2)×180°-Σαi b.偏角法の場合:n 角形の偏角の和は 360°であるから, 誤差ε2は,各測定値をα1α2…αnとすると以下のよう になる. ε2=360°-Σαi c.方向角法の場合:図 3-10 のようなトラバースで,A, B,C の順に測定していく場合,最初 AB の方位角α1 と同時にAD の方位角ωを測っておく.α4-ω=180° であるから誤差ε3は,以下のようになる. ε3=180°-(α4-ω) さて,1つの角を測定したとき,この程度の誤差は やむを得ないとする限度(許容誤差)は,測量の目的, 図 3-7 トラバースの種類 図 3-8 交角 図 3-9 方位角と偏角 図 3-10 方向角法 測角の難易,使用機器の精度などで異なるが,大体の 標準は以下の通りである. 山 林:90″ 平坦地:30~60″ 市街地:20~30″
また,n 角形の閉合トラバース全体の許容誤差 ε0は, すべての角が同じ精度で測られる場合,多角形の角数 の平方根に比例すると考えられるので
(
)
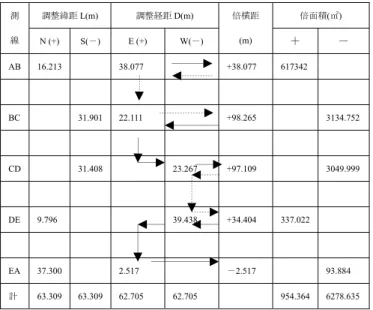
0 n ε = ± × 1つの角に対する許容誤差 となる. 許容誤差の範囲内であれば,これを各内角に等配分 して幾何学的条件を満たす.一方,測距と測角の精度 の釣り合いを示すと表 3-1 のようである. 表 3-1 測距と測角の釣合い 精度 測距 測角機器 1/3,500 布巻尺又はチェーン 1′ 読み 1/7,000 ビニール巻尺 30″ 読み 1/10,000~ 鋼巻尺,電磁波 20″ 読み (2) 座標計算と調整法 トラバース測量では,図 3-11 のように子午線を X 軸(北を+),東西方向を Y 軸(東を+)とする.X 方向お よびY 方向の成分をそれぞれ緯距 L,経距 D として表 す.緯距・経距は,測線長S と方向角 α によって,以 下のようになる. Li=Si cos αi Di=Si sin αi 各測点Pi+1のXY 座標値は,以下のようにその 1 点 手前の測点Piの座標値を加えて計算することができ, それぞれの合緯距,合経距と呼ぶ.測点Pi+1の合緯距:x i+1=x i+Li =x i+Si cos αi
測点Pi+1の合経距:y i+1=y i+Di =y i+Si sin αi
n 角形のトラバースの場合,(x n,y n)は以下のようにな る. 1 1 1 1 1 1 cos s n n i i i n n i i i x x S y y S in α α − = − = = + = +
∑
∑
各測線の中点からX 軸に至る距離を横距といい,そ の2 倍を倍横距という.倍横距は,2 測点の Y 座標の 和(y i+y i+1)≡M iで与えられ,これは面積計算に用いら れる. 閉合トラバースならば,Pn+1=P1であるが,測定に 閉合誤差ε がでたとき, 2 2 2 2 2 1 1 1 1 ( ) ( ) L D xn x yn y ε =ε +ε = + − + + − となる.そして,閉合誤差と全長の比を閉合比と呼び, 通常1/R のような分数で表し,トラバース測量の精度 を表す. 1 R S ε = =∑
閉合比 図 3-11 トラバース測量の緯距・経距 この閉合比の制限(許容誤差)は,測量の目的,測量 の難易などで異なるが,大体の標準は以下の通りであ る. 山 林:1/500~1/1,000 平坦地:1/1,000~1/5,000 市街地:1/5,000 以上 トラバースの閉合比が許容精度以内の場合には,次 のような方法で緯距・経距を修正し,図形を閉じさせ る. 図 3-12 トラバースの閉合誤差 (a)トランシット法則:測距より測角の精度が高いとき に適用される.降雨時などの場合に鋼巻尺が使えずに, エスロン巻尺等で代用したときなどは,測角精度が上回 る.このようなときに,トランシット法則が適用される. 補正量は,以下のように測線の緯距(Li)・緯距(Di)の長さ に比例して配分する. 緯距の補正量:CLi=(ΣLi)×Li/Σ|Li| 経距の補正量:CDi=(ΣDi)×Di/Σ|Di| ただし,添字i は,i番目の測線に対するものを示す. また,添字L,D はそれぞれ緯距,経距に対応する.(b)コンパス法則:測距と測角の精度が大体同じときに 適用される.過去,コンパス(磁針と水平角,高低差を 測定できる簡単な装置を1つにした器械)とチェーン を用いてトラバース測量をしていたときに名付けられ た方法である. 補正量は,以下のように測線の長さ(Si)に比例して配 分する. 緯距の補正量:CLi=(ΣLi)×Si/ΣSi 経距の補正量:CDi=(ΣDi)×Si/ΣSi (3) トラバースの面積 前項で述べた倍横距と緯距によって閉合トラバース の内部の面積を求めることができる.すなわち,各測線 の倍横距,緯距をそれぞれ,M1,M2,…Mn,L1,L2…Ln とすれば,面積A は以下の式で表される. A=|M1L1+M2L2+…+Mn L n|/2 ただし,倍横距 Miは東(E)に向かうものは正(+),西 (W)に向かうものは負(-),緯距 Liは北(N)に向かうもの は正(+),南(S)に向かうものは負(-)の符号を持つ. 倍横距には以下の関係が成立する. M1=y1+y2=y1+y1+D1=2y1+D1 M2=y2+y3=y1+D1+y2+D2=M1+D1+D2 M3=y3+y4=y2+D2+y3+D3=M2+D2+D3 : :
Mi=yi+yi+1=yi-1+Di-1+yi+Di=Mi-1+Di-1+Di
この面積公式を,図 3-13 のような多角形について考 えれば以下のようになる.
台形A1ADD1の面積
=(A1A+DD1)×A1D1/2=|DA の倍横距|×|DA の緯距|/2
↑符号+ ↑符号- 台形B1BAA1の面積
=(B1B+AA1)×B1A1/2=|AB の倍横距|×|AB の緯距|/2
↑符号+ ↑符号- 台形C1CDD1の面積 =(C1C+DD1)×C1D1/2=|CD の倍横距|×|CD の緯距|/2 ↑符号+ ↑符号+ 台形B1BCC1の面積 =(B1B+CC1)×A1D1/2=|BC の倍横距|×|BC の緯距|/2 ↑符号+ ↑符号+ ∴四辺形ABCD の面積=台形 C1CDD1の面積 +台形B1BCC1の面積 -台形A1ADD1の面積-台形B1BAA1の面積 =Σ(各測線の倍横距)×(緯距)/2 図 3-13 3.5 水準測量 水準測量は,レベルと標尺を用いる直接水準測量と 高低差に関係のある他の量を測って計算によって求め る間接水準測量の2 つに大別される.後者は,水面の あるような特殊な地形の場合や精度の低い測量以外に は行われない. 以下に,直接水準測量の調整法について述べる. (1) 両端が既知点と求点の単一路線 測点 A の標高 HAが既知の単一路線AB を往復した 全測線長をn 個に分割する.盛替点 T1,…TM(測点B がM 番目の盛替点とする),…Tnに対して,高低差h1, …hM,…hnを測定すれば,測点B の調整地盤高 HBは, 次式のようになる. HB=HA+h1+…+hM+ΔHB ただし,⊿HB=-(h1+…hM+…hn)/2 図 3-14 両端が既知点と求点の単一路線 (2) 両端が既知点の単一路線 測点A および B の標高 HAおよびHBが既知の単一路 線AB を往復した全長 S を n 個に分割する.盛替点 T1, …TM(求点 P が M 番目の盛替点とする),…Tn(HB)に対 して,高低差 h1,…hM,…hnおよびs1,…sM,…snを 測定する(往復の平均をとる).測点 P の調整地盤高 HP は,次式のようになる. HP=HA+h1+…+hM+ΔHP ただし,⊿HP=-[h1+…hM-(HB-HA)](s1+…sM)/S 図 3-15 両端が既知点の単一路線
(3) 環状路線の往復 測点A(標高 HAが既知)から同じ点に帰る環状路線全 長S を n 個に分割する.盛替点 T1,…TM(求点 P が M 番目の盛替点とする),…Tn(測点 A)に対して,高低差 h1,…hM,…hnおよびs1,…sM,…snを測定する(往復 の平均をとる).測点 P の調整地盤高 HPは,次式のよ うになる. HP=HA+h1+…+hM+⊿HP ただし,ΔHP=-(h1+…hM)(s1+…sM)/S 図 3-16 環状路線 (4) 複数の既知点から求点に至る路線 標高が既知である測点A,B,C,…から求点 P の高低差 h1,h2,h3,…および各測線長 s1,s2,s3…を測定する.各点よ り求めた標高をH1,H2,H3,…とすると,測点 P の調整地 盤高 HPは,重みを各測線長の逆数とした加重平均で, 次式のようになる. HP=(H1/s1+H2/s2+H3/s3…)/(1/s1+1/s2+1/s3…) 図 3-17 複数の既知点から求点に至る路線 (5) 1 つの既知点から求点に至る複数路線 標高が既知である測点A から,複数路線を経由して 求点 P の高低差 h1,h2,h3,…および各測線長 s1,s2,s3…を 測定する.各点より求めた標高をH1,H2,H3,…とすると, 測点P の調整地盤高 HPは,重みを各測線長の逆数とし た加重平均で,次式のようになる. HP=HA +(H1/s1+H2/s2+H3/s3…)/(1/s1+1/s2+1/s3…) 公共測量の水準測量は,精度に応じて以下のように 区分される. ① 一等水準測量:主要道路に約2km ごとに配置した 水準点を測量するもので,我が国ではこれが最も 精度が高いものである.往復の較差は2km の往復 距離S(km)に対して 3mm 以内とされている. ② 二等水準測量:一等水準路を連絡するために中間 に設けられた水準点を測量するものである.往復 の較差は2km の往復距離 S(km)に対して5 2Smm 以内とされている. ③ 三等水準測量:国土調査法の基本水準測量に相当 し,建設工事や地形測量の水準測量に適用される ものである.往復の較差は2km の往復距離 S(km) に対して15mm 以内とされている. ④ 測標水準測量:山間部では,往復でなく片道水準 測量をすることがあり,これを測標水準測量とい う.標尺台の低(2.5cm 高)と高(5cm 高)とを 1 測点 ごとに読み取り,高・低の較差は 30cm 以下とさ れている. ⑤ 簡易水準測量:簡易レベルやハンドレベルを用い て水準測量するものを含み,往復の較差は最小等 高線間隔の1/5 以内とされている. 水準測量の規格をまとめると表 3-2 のようである. 表 3-2 水準測量の規格 区分 往復の較差 閉合差 視準 距離 最小 目盛 水準器 感度 一等 3mm 以下 (2km 往復) 1.5 S mm 60m 以下 0.1mm 10″ 以上 二等 5 2Smm 5 S 〃 70m 〃 1 〃 20″ 〃 三等 15mm (2km 往復) 10 S 〃 70m 〃 1 〃 40″ 〃 測標 30mm( 高 ・ 低の較差) - 70m 〃 1 〃 40″ 〃 簡易 最小等高線 間隔の1/5 200 S〃 80m 〃 5 〃 40″ 〃
第4章 細部測量 4.1 概要 前章で説明した基準点測量は,主として国土を対象 とした精密なもので,明治以降の国土基本図作成に必 要なものであった.すなわち,先人達は全国を三角網 や水準路線網で覆い,国家基準点の座標を精密に決定 し,これにより局地的な地形や地物の位置を求める細 部測量を行い,全国の隅々にわたる地図を作成してき た.そして,今では各種の地形情報等が蓄積され,だ れでも手軽に利用できる環境にある. しかし,国土は時々刻々と変貌しており,今もなお 細部にわたる地表の現況を捉えることは重要なことで ある.細部測量には平板測量や空中写真測量,人工衛 星によるリモートセンシング画像を活用している.写 真測量やリモートセンシングなどの場合は,縮尺が 1/1,000 以下であり,1/1,000 以上の大縮尺や空中写真に 写らない場合などは,主として平板測量を用いる. 一般に,平板測量による地形図作成は以下の手順で 行われる. ① 基準点測量:40~50m 間隔で 1 点の基準点を設置 し,トラバースを確定する.この基準点測量のこ とを骨組測量ともいう. ② 基準点の展開:座標展開機,自動製図装置等を用 いて,図紙上に基準点および輪郭線をそれらの座 標値に応じて正確に図示する. ③ 細部測量:基準点等に平板を設置(整準・致心・標 定)し,アリダードで対象物を視準して,地形,地 物を図紙上の位置に図示する.地物の水平位置は, 放射法やオフセット法(支距法)などにより測定して 図示する.対象物の標高は,基準点の標高を既知 として,アリダードと標尺等とを組み合わせて基 準点との相対的な高さを求めて決定する. ④ 編集:図式に従って,地図としての体裁を整える. 地形図では,等高線で地形を表現するのを原則と するが,崖や大きな岩のあるところ,砂礫が散ら ばっているところなどの特殊な場所では,等高線 に代え,またはこれと併用して特有の記号を用い る.等高線には,基本的な等高線である主曲線, 主曲線を5 本ごとに 1 本太めにした計曲線,補助 曲線(地形を特に詳細に表現するために主曲線間隔 の1/2 の間隔をもった曲線)および特殊曲線(補助曲 線と主曲線との間隔の 1/2 の間隔をもった曲線)が ある. ⑤ 製図:図面に着墨して仕上げる. 現在,国土地理院で刊行している地形図類には表 4-1 のようなものがある. 表 4-1 国土地理院の地形図 図名 対象地域 枚数 1/10,000 地形図 都市地域 311 面 1/25,000 地形図 全国 4419 面 1/50,000 地形図 全国 1291 面 一方,多くの技術者が測量機器を実際に使用する場 面としては,以下のようなものが考えられるが,ふつ う小区域で基準点(図根点ともいう)を設定し,骨組測 量および細部測量を行う. 建設工事の事前調査 遺跡の調査 建物や地盤の変形・沈下などの調査 災害の被害調査 測量技術の修得のための実習など 本章では,測量技術の修得のための実習に対して考 慮し,建設分野における構造物の建設工事に先立ち, 設計・計画などの資料を集めるための建設敷地および その周辺を調査する測量(敷地測量)について説明する が,他の場面にも十分参考になるものと思われる. 敷地測量では,以下の項目について調査・測量が行 われる. ① 敷地の形状・地物の位置の測量および面積計算: 構造物の種類,規模,敷地の大小,地域などによ って測量の制度や必要事項などが異なり,測距器 械だけによる測量,トラバース測量,スタジア測 量,まれに三角測量あるいはこれらの併用によっ て行うことがある. ② 敷地内外の高低関係の測量:地盤の高低は,特定 の基準に対する関係高によって示す.基準として は,水準点(ベンチマーク;BM)の場合と仮設の水準 点(仮ベンチマーク;仮 BM)の場合がある. ③ 埋設物や地下構造物との関係の調査:敷地内にあ る電力線,電信電話線,ガス,上下水道などは建 設工事に際し,工事の妨害となったり,工事のた めに悪影響を及ぼす場合が考えられ,移設したり, 保護する必要があるので詳細な調査を必要とする. 本書では,③は測量以外のデータや調査を必要とす るので割愛する.