理 学 療 法 学 第41巻 第7号 399
〜
406頁 (2014年 ) 研 究 論 文(
原 著)
片
麻
痺
患
者
が
起
立
動作
に
失敗
す
る
運動 学 的
・
運 動 力学 的特 徴
*一
動
的
バ ラン ス指標 (
Xcom
)
を用
い た分
析
一
長
田悠 路
1)#渕
雅
子 1) 要旨 【目的】片 麻 痺 患 者の起立成功時と起立失 敗 時の違い を分 析 し,
片麻 痺 患 者 が 起 立 動 作で失敗 する 原 因 と そ の解 決 方 法 を検討する こ と を本 研 究の 目的と し た。 【方 法】対 象は,
起 立 成 功,
起 立 失 敗の両方の動 作 が計測 さ れ た7
名。
起立 成 功 試行と 起 立 失敗 試 行につ い て,
質 量 中心 位 置,
推 定質量中 心位置 (以 下.
Xcom
>t 関節モー
メン トなど を ウ ィルコ ク ソ ン の符 号 順 位 検 定に て比 較し た。
【結果】起立失 敗 試行と 比 べ起立成 功 試 行で は,
離 殿 直 後にXcom が足 関節よりも前 方へ 移動しており,
前後方向の位 置に有 意 な 差がみ ら れ た。 また,
起 立 成 功 試 行で は離殿後の非麻 痺 側 股 関 節 伸 展モー
メ ン トピー
ク値 が 大 きかっ た。
【結 論】起 立 失 敗 試 行で はXcom
の前方移動が少なく,
後 方へ 質 量 中 心 が 押 し戻 さ れる結 果になっ た。 こ の よう な失 敗 を改 善 する た め に は,
質 量 中 心の前方加速 を促 すような体 幹の前 屈 方 法の再 学習 や,
股 関節 伸 展 筋 群の活 動の賦 活が重 要で あ ること が示 唆さ れ た。 キー
ワー
ド 片 麻 痺 患者,
起 立 動 作,
動的バ ランス は じ め に 起立動 作は トイレ動 作や整容な ど主 要な 日常生活 動作 の再獲 得に不 可 欠 な動 作であ り1)2),
理 学 療 法に よ る介 入 が 重要と なる。
起 立動 作 を達 成 する た めに は,
質 量 中 心 (以 下,
COM
)の前 方 移 動 を 上 方 移 動へ 切 り替 える必 要がある ため,
離 殿 時に は安 静立位以 上の床反力が 下 肢 に 加 わ る 3)。 よっ て,
姿 勢 制御 能力や筋 出力が低下 し た片 麻 痺 患 者は離 殿に困難 を きた すこ とが多い。
筆者ら は片麻痺 患 者の起立動 作 を計測 し,
足 圧 中 心 (以 下,
COP
)の 前 後 移動 幅,
COM の前 方 移 動 加 速 度,
動 作 時聞,
離 殿 時 麻 痺 側 荷 重 率 を分 析 した。 その結 果,
身体 能 力が低い 片 麻 痺 患 者は,
麻 痺 側下肢へ の荷 重 量が少ない非 対 称 な 動 作 と な ることで,
COP の前 後 移 動 幅やCOM
の前方 移 動 加 速 度 が 小 さ くな り,
離 殿 までの動 作 時間 が 延 長す る こと が わ かっ た4)。 離 殿 をス ムー
ズ に行 うた め に は,
離 殿まで に COM の効 率 的 な加 速が必 要であ り3).
COP
の後 方 移 動や股 関節の遠 心 性 収 縮に よ るCOM
前 方 加 速 *1(inetic and Ktnematic Features of Failed Sit
−
to・
stand Trials inStroke Patients Analysis Using a Dynamic Balance Index l) 特 定 医 療 法人社 団三光 会 誠 愛 リハ ビリテ
ー
ショ ン病 院(〒816
−
0952 福 岡 県 大 野 城 市 南 大 利2−
7−
2)Yuii Osada PT
,
Masako Fuchi,
OT:Seiai RChabilitation Hospital#E
.
mail:wbcwbeO6 @yahoo,
co.
jp(受 付日 2014年3月26 日/ 受理 日 2014年6月 17 日)
の コ ン トロ
ー
ルが 重 要 な役 割 を果 た す5)。
起 立時の
一
般 的 なCOM の前 方 移 動 方法に は 大 きく分 けて 2つのパ ター
ンが あると され てい る6一
8 )。
1
つ が,
体 幹を前 傾し
COM
を足 部上まで移 動 させ た後に離 殿 する
force
control strategy で あり,
もう1つ が COM を より速 く前 方へ 加 速 させ,
COM
が 足 部 上に移る前に離’
殿 するmomentum transfer strategy である
。
momenttransfer strategy は健 常 者の多 くが行う効率的な方法で
ある とされている 6)8
−
10)。一
般 的に身体 能 力の低い患者は
,
前 者の パ ター
ン (force control strategy ) を選 択し,
大 きく体 幹を前 傾し
,
平 均 値よ りもCOM
を前方に 移動 してか ら時 間を かけて離殿 する 4)。 し か し そ れ ら身体 能 力の低い 患者の 中でもt
後 者の momentum strategy を 選 択 し,
より速 く起 立 しようとする もの の離殿後に身体 が後 方へ 倒れ こ んで しま う症 例 を経 験 するこ とがある。
このような動 作 方 法では,
移 乗 などの起 立 を含 む日常 生 活 動作で転 倒の危 険を伴 うため,
介 護 者によ る見守りを 外 すこ とができ ない。 しか し,
バ ラン スを失っ て後 方へ 倒 れ る こ と (以下,
起立失 敗 )の原 因 を分 析し た研 究は ほ と ん ど ない。
唯一
存 在 する起立時のバ ラン ス制 御に関 する研 究は,
起立時に床 面 をスラ イ ド さ せ て後方へ の転 倒 を誘発し,
その際の ステッ プの大 き さ とその と きのCOM
の位 置 関係を分 析し たもの ll)など が散 見さ れ る の み で あ る。
400 理学 療 法 学 第41巻 第7号
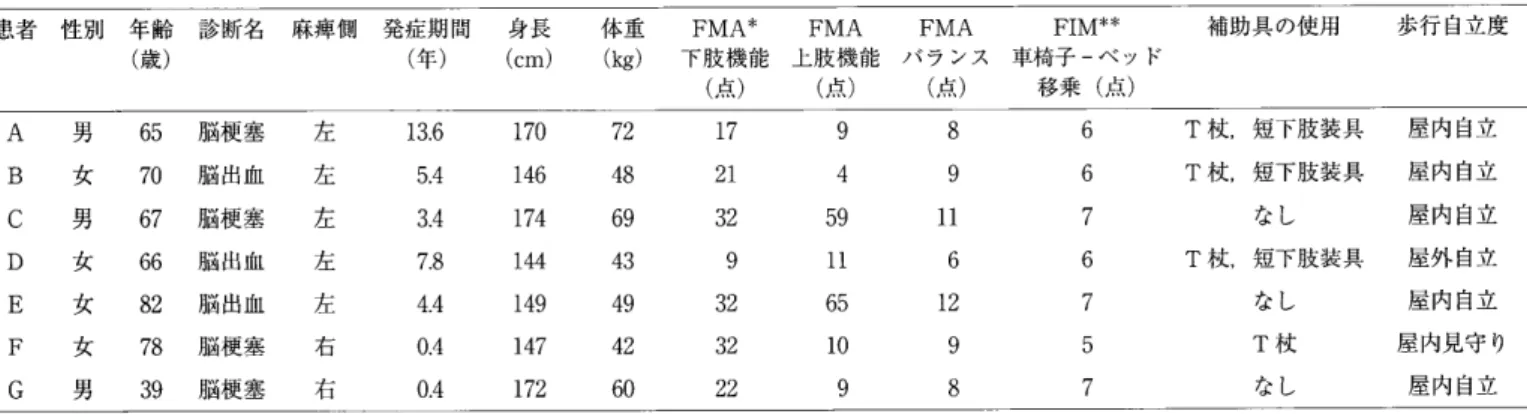
表 1 対 象 者 内訳
患 者 性 別 年 齢 診 断 名 麻 痺 側 発 症 期 間 身 長 体 重 FMA
*
(歳) (年 ) (cm ) ( ) 下 肢 機 能
(点)
FMA FMA FIM* * 補 助 具
の使 用 上肢機能 バ ラ ン ス 車 椅 子
一
ベ ッ ド (点 ) (点 ) 移乗 (点 ) 左 左 左 左 左 右 右 塞 血 塞 血 血 塞 塞 梗 出 梗 出 出 梗 梗 W 凶碑
凶W
凶 W 凶 W 凶弾
凶呷
凶 月 月 月 闃 月 月 且 5 0 7 6 2 8 9ρ
0 7ρ
0广
0 8 7 3 男 女 男 女 女 女 男 ABCDEFG 歩 行 自立 度 13.
65.
43.
47.
84.
40.
40.
4 1701461741441491471722893Qゾ
20 74ρ
04▲
446 712G4222 123 332 94▲
91509に
り 161 8916298 1 1 6676757 T杖,
短 卜肢装具 T杖,
短下肢装 具 な し T杖,
短下肢 装 具 なし T 杖 な し 屋 内 自立 屋内 自立 屋 内 自立 屋 外 自立 屋 内 自立 屋内見守 り 屋 内 自立*
FMA :Fugl−
Meyer Assessment**FIM ;Functional Independence Measure
起立 をバ ラン ス とい う観 点で分 析 する際に
,
今までは
,
支持 基 底 面 (以 下,
BOS )とCOM
の位 置 関係に よ る 静力学 的 な 視点か ら分析 する こ と し か で きなか っ た。し か し
,
実 際の 起立動 作で は,
momentum transferstrategy の ように
COM
がBOS
の中に入る前に離 殿 する こ とも多い た め
,
COM とBOS の 関係 だ けでは 離 殿時の安 定 性につ い て分 析 する こと はで きない。 し か し
,
近 年 注 目 さ れてい る動 的バ ラン ス指 標 (以下
,
Xcom : extrapolated center of mass )に よ る解 析を行 うこ とで,
COM
の移 動 速 度を加 味し た動 力 学 的な分 析をするこ と が可 能と なっ た 12”
14)。
Xcom
は倒立 振 子モデル に基づ く動 的なバ ランス指標であ り,
COM が 向 か お う と し て い る場 所 を示 してい る。 こ の Xcom 位 置を床に投 影し,
BOS との位 置 関 係 を分 析 するこ とで,
離 殿 時にCOM
が BOS より も後 方にある momentum transfer strategyであっ た とし ても
,
COM
の前 方 移 動 速 度を加 味して,
どの程 度 前 後 方 向の動 的 安 定 性が保た れてい るのか を 評 価 する こ とが で きる。
ま た,
動的安定 性 を 得 る 背 景 と なっ て いる もの に対して も,
関 節モー
メ ン トや関 節パ ワー
か ら分 析 するこ とがで き る。
動 作の安 定性を分 析 する うえでは,
こ の動力 学 的 な 解 釈が重 要とな り,
近年のロ ボッ ト工学ではこの概念 が 主 流となっ て 2足 歩 行ロ ボッ トが開発さ れてい る。
その結 果.
ス ムー
ズで柔 軟な動きが可能と なり歩 行 速 度 が 格 段 に上 がっ た だけでな く,
今 まで では困 難であっ た 坂 道 や 階段の歩 行 が可 能となっ た 15)16)。 これ は,
人の 日 常 生 活 動 作に は動 的安 定性に基づ くプログラムが 重 要であ る こ とを示し て おりT
患 者の動作 を 分析 する際にも,
この 視 点か ら安 定性に関する解釈を行 う必 要 が あ る と 考 え る。
当 院では,
定 期的に起 立 可 能 と なっ た 片 麻 痺 患 者の 動 作 を三次 元 動作 解 析 装 置で計 測してい る が,
稀に起立 に 失 敗 する患 者 がい る。 今 回,
今ま で当院 で計 測し てきた 起立動 作の中か ら,
起立失 敗と成 功の両 方の動 作が 同 日 に計測すること が で き た患 者 を抽 出 した。 本 研 究の 目 的 は,
これ ら片麻痺患 者の起 立 動 作 につ い てXcom
など を用い て比較し,
片麻痺患 者 が起立動 作で失 敗 する原 因 を調べ る ことで,
起立時の転 倒予防に対 する治 療 的 着 眼 点を検 討 することであ る。
対 象と方 法1.
対象 平 成20
一
25
年まで の5
年 間,
選 定 基 準 を満たしたう えで三 次 元 動 作 解 析 装 置 に て起立動 作を計 測した片 麻 痺 患 者 136名の 内,
1試 行目に起 茫が 失敗し た もの の,
そ の後の試 行で は成 功 した片 麻 痺 患 者7名 (平均年齢67
± 15,
1歳 ) を今回の分 析の対 象と し た。
対象者の選定 基準は,
脳卒 中に よっ て一
側 性の運動 麻 痺を 呈 してい る,
起立 に影 響 を与 える整 形 外 科 的疾 患 が ない,
起 立 動 作 が 独 力 で 行えている,
課 題に対 する指 示理解が n∫能で あ る と し た。
な お,
患 者の詳 細を表 1に示 す。
な お 本 研究は誠 愛リハ ビ リ テー
シ ョ ン病 院倫理委 員 会 の 承 諾 (承 認番号 13−
089)を得て実 施し,
対 象者には 実 験 開始 前に研究に対 する説 明を行い,
同 意 が得ら れ た 患 者のみを対 象と し た。 2.
方 法1
)課 題動 作 課 題 動 作は背もた れのない木 製 台か らの起 立動作 と し た。
座る位 置は大腿 長の 2分の 1の深 さ まで座 る もの と し,
上肢の位 置は体 側に垂ら し た ま ま と し た。
ま た,
測 定 は 裸 足 にて行い,
足 部の位 置は本人 が 立 ちやすい位 置 と し た。
し か し,
台は 四方が板で囲ま れてい る た め,
座 面位 置よ り後 方へ 足を引 くこ と がで き ない 状 況 で あっ た。
起立速 度は各 対 象 者の至 適 速 度 と した、
立 ち 上が る 際に は手で台を押さ ない よ う に 指 示 し,
数 回の練習 を 行っ た後,
言 語 的 合 図に よっ て立 ち 上が る動 作 を一
回計 測するもの とした。 起 立に失敗し た場 合は,
再 度 計 測を 行っ た。
そし て,
起 立に成 功 し た 動 作 を試 行S
(Success)片 麻痺患者 が起立動 作に失敗する 運動 学的
・
運動 力 学的特 徴 401 とし,
起 立に失 敗し た動作を 試行F
(Fail
)と し た。
な お,
起 立に失敗し た患者はt 練 習の際には起立に成 功し ていた。
2
) 測 定 装 置 床反力 計4
枚 (AMTI
社 製,600
mm ×400
mm ),
三次元動 作 解 析 装 置 (VICON
社 製,
赤外線カ メラ14
台) を使 用し て測 定 を行っ た。 足 部 だけ で なく殿部に か か る 力 も左 右に分け て 分析 する た め,
座る木 製 台は2
つ に 分 断さ れ たもの を使用 し た。
後方2
枚の床反力計に木 製の 台 を1
つ ずつ 設置し た状 態で床反力計のゼロ設定を行っ た後,
前 方2
枚の床 反力 計に そ れぞれの足 部,
後 方 2つ の 台に左 右の殿 部が別々 に乗る ように座るもの とした。 な お,2
つ の台は対 象 者の下 腿 長 (足 底 面か ら膝 関 節 裂 隙 まで の高さ)に 1cm 刻み で合わ せて座る もの と した。 床 反 力 計と三次 元 動 作 解 析 装 置のデー
タはサンプリング 周 波 数 100Hz でパー
ソナル コ ンピュー
タ に同 期 して取 りこみ,
臨床 歩行 分析研究 会の推奨 する プログラ ム(
DIFFGAIT
お よ びWave
Eyes
)を用いて関節中心点の 内挿
,
COM 位置の算出,
関 節角度・
関 節モー
メ ン ト・
関 節パ ワー
の計 算 など を行っ た。 身 体に貼 付 した マー
カー
の位 置は,
左 右の肩 峰,
股 関節 (立位に おける 上前腸骨棘と大 転 子を結ん だ線上の下 方3分の 1の位 置),
膝 関節 (膝 伸 展 位で の膝 蓋 骨 中 点 を通 る 線 上で,
かつ 膝 蓋 骨 を除い た大 腿 骨 遠 位 端 前 後 幅の2
分の1
の位 置 ),
腓 骨 外 果,
第5
中足 骨頭 部の計10
ヵ所と した。
3
>分 析方法 動 作 時の バ ラン ス 指 標と して,
以 下〜
の指 標を分 析 し た (図1)。 BOS に対 する各 指 標の位 置関係 を 統 計 学 的に分 析 するた めに,
殿 部 離 床 時の両 側の足 関 節 を結 ん だ中点 (以下,
C−
Ankle) を基 準として各 指 標の位 置 関 係 を分 析し た。 本 来BOS
は面 を表 す もので あ る が,
後 方のBOS
の 限界 点 をC−Ankle
と定義し,
矢状 面 上 で の位 置 関係の みを分 析 するもの とし た。
指 標と してC−
Ankle か らCOM
ま での進行方 向距 離 (以 下,
離 殿 時COM
進 行 距 離 ),
C−Ankle
か らCOP
ま での距 離 (以下
.
離 殿 時COP
進 行 距 離 ),
C−Ankle
か らXcom
まで の距 離 (以下
,
離 殿 時Xcom 進 行距離 )を抽 出し,
COP
か らXcom の距 離につ いても 離 殿 時Xcom −−COP
進行 距 離と して算 出 した。 関節モー
メ ン トと して は.
下肢 関 節モー
メ ン トの ピー
ク値,
関 節パ ワー
とし て は 股 関節 伸 展の遠 心 性パ ワー
の ピー
ク値 を抽 出し た。 関節 パ ワー
は関節モー
メ ン トと関 節 角 速 度 を掛 け た ものでt
その値が 正である ものを求心 性のパ ワー
と し,
負で あ る ものを遠 心 性パ ワー
とした。 遠 心 性のパ ワー
は 関節モー
メン トの発 揮と関節 運動 が逆 転 しているこ とを示し,
筋 の遠 心性 収 縮の よう な動 きを意 味 するもので あ る。
股 関 節の遠 心 性パ ワー
のピー
ク値の出現 する タイミング の左 右 差 を調べ る た め に,
股 関 節 伸 展の遠 心 性パ ワー
のCOM
竃画∂
Vx
=dx
/dt
ω 。一西
万
COM
Xcom
=x
+
璽
ω 0 mL
、 COP Xcom宀 幽
図1Xcom の算 出 方 法 と各 指標の位 置関係と安 定性 g=
重 力 加 速 度,
1翻
軸 長tm=
質量,
Vx=
質量中心速 度,
ω D=
振 子の振動数 BOS の中 にXcom が含ま れて いる ときに はその動 作は安 定 してい る
.
COM とCOP の間にXcom がある ときには,
COM の移 動 を止め る こ とがで きる が
,
Xcom がCOP を超 えてし まった場 合 は
,
COM
の制 御 が 困 難 に なっ てい る,
も し くはま だその方 向へ 加 速 させ よう とし てい ることを 示 す
,
しか し,
XcomがBOS の外に移 動 した 場 合は
,
COM の動 き をそ のBOS 内で は制 御でき ない状 況であ り,
Xcom が 移 動 した位 置に新た なBOS
をつ くる必 要 が あ る.
ピー
ク値出現時間の左右差 (非麻 痺 側一
麻 痺 側)を分 析 し た。
ま た,
体 幹 前 屈 角 度の ピー
ク値につ い て も分 析 する こ とでt
離 殿 まで の体 幹 前 屈 方 法の分 析 を行っ た。 な お,
〜
の距 離は身長で正 規 化し,
の関節モー
メン トは身長・
体 重で正 規 化 を 行っ た。
Xcom
は,
歩行時の倒立振 子モデル を基に し,
速 度 因 子 (COM
速 度〉を倒立振子の振動 数 (ωo:重力 加 速 度 を 足 関 節マー
カー
位 置か ら 股関 節マー
カー
位 置 まで の高 さ で除し た値の平 方 根 )で除 したもの をCOM
位 置に足 し た値であ る 13)(図 1)。 原 法で は,
倒立振 り子の軸 長 を 股関 節か ら足 関 節の長さに定 数 (矢 状 面であれ ば1.
2,
前額 面であれ ば 1.
34
)を掛 けて.
回 転 軸 か らCOM
の距 離 を算出 していた。
し か し,
今 回は下 肢 屈 曲位で の 動 作であ る た め,
下 肢 長 を 軸 長 (1)とする の で はな く,
4
リンクモデ ル に よっ て計算さ れ たCOM
位 置か ら足 関 節 まで の距離を倒立振 り子の軸 長 (1)と して計 算 を行っ た17)。
な お,
今 回の計測動 作は 起 立動 作であ り,
足 部 の位置は変 化しないた め,C−
Ankle をCOM
の回転 軸 と み な し,
C・
Ankle か らCOM まで の距 離を倒立振子の 軸 長 (1
)と し た。
統計 学 的 処理 は,
試 行S と試 行 F の各 解 析 指 標につ いて,
ウィ ルコ ク ソ ン符 号 付 順 位 和 検 定に て比 較し た (有 意水 準5%)。
402 理学 療 法 学 第41巻 第7号 表2 試行 別の運動学 的
・
運動 力 学 的デー
タ (平 均 値±標 準 偏 差 ) 試 行S 式彳丁一
F、
、
=
凵
P値 離殿時COM 進 行 艮巨離 ( ノHt) 離 殿 時COP 進 行 距 離 (m fHt) 殿 殿 時Xcom 進 行距 離 (m IHt) 離 殿 時Xcom−
COP 進 行 距 離 (m 〆Ht) 非 麻 痺 側 股 関節伸展モー
メ ント ピー
ク値 (Nm 〆lh fkg) 麻痺側 股 関 節 伸 展モー
メン ト ピー
ク値 (Nm /Ht/kg) 非 麻 痺側膝 関 節仲展モー
メン トピー
ク 値 (Nm 〆Ht/kg) 麻 痺 側 膝 関節 仲 展モー
メ ント ピー
ク値 (Nm fHt fkg) 非 麻痺側 股関節伸 展の遠心 性パ ワー
の ピー
ク値 (w ) 麻 痺側 股関節伸展の遠 心性パ ワー
の ピー
ク値 (w ) 股 関節 伸 展の遠 心性パ ワー
の ピー
ク値出現時間の左 右 差 (非 麻 痺 側一
麻 癖 側 ) 体 幹 前 屈 角 度の ピー
ク値 (度 )一
D.
Ol5± 0.
022−
〔}.
020± 0.
Ol7 0.
007士 O.
012−
0.
000± 0.
Ol4 0.
Ol9± 0.
019 0.
003± 0.
019 0,
012 ± 0,
011 0,
004± 0.
Oll O.
431 ± 0、
ユ63 0.
360 ± 0.
171 0.
274 ± 0.
145 0.
308 ± 0.
15〔} 0501 ± 0.
168 0.
566 ± O.
134 0.
079± 0.
098 0.
102 ± 0.
095−
14.
97± 14.
87−
13.
39± 15.
95−
1.
8.
20± 上4.
81
−
14.
71 ± 16,
14−
0.
041 ± 0.
059 0,
124 ± 0.
222 46,
6 ± 6.
0 47.
2 ± 8.
6 0.
176Q.
028* 0.
028半 0.
043* O.
028* 0、
3980,
3980,
7530、
3100.
2370、
027*
0.
735 *p< 0,
05 (関 節モー
メ ント は,
伸 展を+ と して表 記 ) 齢 ▲ ー ー ■ ー ■ ▼ 後試
行
S
N.
・毒
試
行
F
図 2 離 殿 時に おける水 平面上の COM
,
COP,
Xcom の位 置 関係 例1
/
MP=
左 第5中足 骨 頭,
R−
MP=
右 第5中 足 骨 頭.
L−
ANK=
左外 果 R−
ANK=
右 外 果,
BOS 1 攴持 基 底 面
,
COM=
質 量 中心,
COP置
圧中心,
Xcom孺
推 定 質量 中 心4つ の足 部マ
ー
カー
で囲 まれ た範 囲 をBOS と し,
離 殿 時のCOM,
COP,
Xcom の位 置 を同一
平 面上に投 影 して表 してい る.
COM
の位 置に関 して は試 行 間でそ れほ ど連いは ない が,
試 行Sで は試行 Fと比べ て Xcom がより前 方へ 移動して い る,
結 果
表2に試 行別の 各運動 学 的
・
運 動 力 学 的デー
タ を示 す。
図2
に水 平 面上のCOM ,
COP ,
Xcom の位 置 関 係例を示 す
。
離殿 時COM
進 行 距 離 は,
試行 間に有 意 な 差 が な く,
両 試 行 と も に,
後方の BOS 限 界点の 目安で あ るC−Ankle
よりもCOM
が後 方に位 置し た状 態で離 殿 していた。
離 殿 時COP
は試 行S
で試 行F
よ り大 き く前 方へ 移 動 して お り (p;O.
028
),
離 殿 時Xcom に 関して も,
試行S
で は 試 行F
よ り大 きく前 方へ 移 動し てい た (p=
0,
028)。
離殿時Xcom−COP
進 行 距 離につ いて,
試 行S
で は 試 行F
よ りXcom
とCOP
問の距離が 大きく (p=0,
043
),
多くの患者でXcom
がCOP
よ りも 前 方へ 移動し た 状 態で離 殿 してい た。
図3
に そ れ ら各バ ラン ス指 標の位 置 変 化の典 型 例 を 示 す。
下肢 関 節モー
メ ン トの ピー
ク値に関しては,
試 行S
で は試 行F よ り離 殿 後の非 麻 痺側 股関 節 伸 展モー
メ ン ト ピー
ク値が 大 き かっ た (p=
0.
028)。
その他の関節モー
メ ン トの ピー
ク値に関して は有 意な差が な かっ た。
図4
に各 関節モー
メ ン トの変 化 例,
図5
に股 関節パ ワー
の変 化 例を示 す。 股 関節 伸 展の遠心性パ ワー
の ピー
ク値出 現 時 問の左 右 差につ い て は,
試 行Sで遠 心 性パ ワー
の ピー
ク値 が 左 右で ほ ぼ一
.
・
致してい る もの の,
試 行F で は ピー
ク 値が 出 現 す る 時 問 的な 差 が 大 きか っ た (p=
0,
027
)。・
体 幹 前 屈 角 度の ピー
ク値には有 意 な差 が なかっ た。 なお,
図2〜
6はすべ て同一
被 検 者 (患 者D) の試 行を例と して図にし たもの で ある。 考 察 健 常者の歩 行や起立動 作で は,一
時 的に COM が BOS片 麻 痺 患 者が起 立 動 作に失 敗 する 運動 学的
・
運動 力学 的 特 徴 403 前 o.
1 晒 飢 姫 o 言 こ 鼬 週 暹 隷 ¢ 劉 む.
05 後a、
試 行
S
離.
殿 o.
1o.
ユ5e.
工 o.
050o.
05 心.
1試 行
F
!
碑
倉
○
9●
.
■
● ,
ー
’凵
」.
開
、’‘
D} 正.
5 三 2.
5 離 殿 着殿 時 閥〔s) 図3 各 指 標の前 後 方 向位 置 関 係の変 化 例動 作 開始から終 了 までのCOM
,
COP,
Xcom の 進 行 方向へ の動き を示して い る.
正の値は前 方 を 表し
,
上方の ラ インは 足関節中点 (C−
Ankle)の進 行 方 向 位 置 を 示 して い る.
横 軸 は 時 間 を表し,
矢 印のつ い た縦線が離殿お よ び着殿を示して いる.
試 行S では離殿 時にXcom が GAnkle付 近 ま で 移動し てい る が,
試 行F ではXco皿 が C−
Ank 【eまで到 達 してお らず,
離殿直 後に後 方へ 下 がってい る.
そ れ に 追従して,
COM も後 退し着 殿を迎 えて い る.
試 行
S
+ 昧 章(
切 曽 モ 匿 己 回}
恩 − 脇 亠 \リ
ス i 屮 ユのllj
離殿試 行
F
離 殿 着殿 図4 各 試 行の関 節モー
メ ン トの変化例 離 殿 か ら 動 作終了 ま での,
麻 痺側 お よ び非 麻 痺 側の股 関節・
膝 関 節の伸 展モー
メ ントを積み 上げグ ラフで示し てい る.
股 関 節・
膝の伸 展モー
メ ン トの総 和 は 同程 度であるが,
試 行Sで は離殿時の非麻 痺側股 関節伸展モー
メントが増 大 し,
麻 痺 側 股 関節 伸 展モー
メ ントは減 少 し てい る.
{
酢》
1 』 て 盪 ↑ 躍 ゐ、
餐 虻 乙、
燬 ↓ 3530試行
S
25 、。!
11 麻 痺 側ピー
ク 5e 厚゜
°
,
・
t・
●
3530505 Z21試 行
F
.
5−
1
.
1o“
】.
15一
時 間{s) 非 麻痺 側ピー
ク 105 離殿 1.
5 02.
5.
10・
15 離殿 図5 離 殿 までの股 関 節伸 展パ ワー
の変 化 例 実 線 は 非麻痺側,
点線は麻痺側の股 関 節伸 展パ ワー
の値の変 化 例 を示 してい る.
縦軸の正の 値 は 求 心性の パ ワー
を表し,
負の値は遠心性のパ ワー
を 示して いる.
グ ラフに あ る ○ はピー
ク値 部 分 を示 し て お り,
試行Sで は両 股 関節 伸 展パ ワー
がほぼ同 時 期に出現 し てい る が,
試 行Fで は ピー
ク がずれ てい る こ と に加え,
強 弱の不 明瞭 な波 形となっ ている.
404 理学 療 法 学 第41巻 第7号
図6 スティッ ク ピ クチャ
ー
に よ る各 指 標の矢 状 面 位 置 関 係の例 矢 状 面 に お け るスティックピク チ it・一
と各 指 標の位 置 関 係を示してお り,
黒い ス ティ ック は 麻痺 側 を
,
グレー
の ス テ ィ ッ クは非 麻 痺側 を表してい る,
ま た,
モデル の回転 軸である足 関節 中 心 (C−
Ank [e)に対す るCOM,
Xcom の位 置 を床 面 上に投 影し
,
矢 状 面にお ける前 後 関 係 を示 してい る,
試 行Sで は 黒い 縦 線で示 すC−
Ankleの ライン付 近 まで Xcom (破 線 ) が 進 行し ている の に 対 し,
試 行 Fで はC−
AnkleとCOM のラ イン の中 間に位 置して いる.
上 か ら外 れ ること は多々 あ る が,
そ れで も力学 的 な安 定 性は保た れ てい る。
そ れ ば かりか,
む し ろ動 作 時 間や位 置エネルギー
の使用率の視 点か ら効 率 的である こ と が多 い 6)8−
10) 。 つ ま り,
ある一
時 点の 姿 勢を 切 り だ して,
COM
とBOS
の関係だけで姿 勢 が 安 定しているのか否か につ い て論じ ることは できない。 し か し,
臨床では動 作 分析を行っ た結果,
ある一
時点の不 安 定性や異 常 動 作に 着目 し て 治療展 開を行 うこと もある た め,
その時 点にお い て,
な に がどの ように不 安 定で異 常である のかにつ い て分 析 す る 必 要 が あ る。
今回使用 した Xcom はそれ ら問 題 を 解 決 す る 指標で あ り,COM
が向か おうと してい る 場 所 (Xcom
)がBOS 上 にあるか どうか を分析 すること で,
安定性 を 評価 する こ とがで きる 12−
14)17圓
20 )。
つ まり,
従 来 行わ れ てきたCOM
とBOS
の関 係 から安 定 性を分 析 する静 力 学 的 な 解 析では な く,
その時 点に おける運 動 速 度 と その 方向を加 味した,
動 力 学 的 な 安 定性を分 析 す る こ と が で き る。
今回,
試 行問 で離 殿 時のCOM
位 置に大 き な 差は な かっ た。COM
と BOS の 関係は ほ ぼ同じ状 況である に も か か わ らず,
一
方の試 行は離 殿に失 敗 してお り,
も う一
方の試 行は成 功してい る 。 これはま さに,
静 力 学 的な 分 析 か ら は 動作の安 定 性 を分 析 する こと はで き ない こと を示してい る。
本研 究で動作の解 析に用いたXcom は,
C−Ankle
を 回 転 軸と し た 倒 立 振 子モ デルか ら算 出し たもの である。
つ ま り,
回転 軸のC−Ankle
よ りも前 方にXcom が移 動し な け れ ば,
COM は後 方へ 押し戻さ れ て しま う。 試 行F と 比較し,
試 行S
で はXcom
がC−
Ankle を 超 えて前 方へ 移 動しており,
起 立 を成 功させ る た め に はそ のよ う なCOM
の前方加速が重 要である こと が わ かっ た。 離殿後の関節モー
メ ン トの ピー
ク値か らの分析で は,
試行S
時 に各下肢関節モー
メ ン ト は減少 し た もの の,
非麻痺側 股 関節 伸展モー
メ ン トの ピー
ク値のみ が増 大し ていた。
こ の ことから,
離 殿 を成 功 させ る た め に,
非 麻 痺 側の股 関節 伸 展 筋が よ り 強 く活 動してい る こと が わ かっ た。
藤 澤ら は,
起立動 作の ネッ ト トルク に対 する相 互作用 トルク の寄与を 分析し,
股 関 節 屈 曲運 動の減 速を 短 時 間で行 うこと で膝 関 節の 伸展 ト ル クを増 加さ せ る こ と が で き る た め,
結 局の とこ ろ起立には股 関 節 制 御が な に よ り重 要である と述べ てい る 7)。 下 肢の関 節モー
メン トの ピー
ク値に 関 して,
非 麻 痺 側の股 関 節 伸 展モー
メ ン ト以外に有 意な差はなかっ た もの の,
平 均 値と し て は,
一
回 目の試 行 (試 行F) 後の試 行S において,
麻 痺側の 股 関 節 伸 展,
膝 閧節 伸展モー
メ ン トが減 少 する 傾 向 が あっ た。
こ の こと か ら,一
回目の試 行で失 敗し た後,
起 立 を成 功させ る た めに麻 痺 側 下 肢の活 動を 減 少 さ せ.
そ の 代 償と してCOM
の前 方 移 動の制 勤お よ び 上 方 移 動 を 非 麻痺側股関節 伸 展モー
メン トに依 存 する起立方 法を とっ た 可能 性 もあると考え る。
離殿前の 関節パ ワー
の分 析で は,
試 行 F で は 両 股 関 節の遠 心 性パ ワー
の ピー
ク値が 出現 する 時 間のズレ が大 き く,
左 右の股 関 節の遠 心 性 収縮 が協調的に行 わ れ な かっ た こ と が わ かっ た。
離殿に重 要 なCOM
の前 方 加 速 をコ ン トロー
ルするのは,
股 関節 伸 展 筋群の遠 心 性 収 縮片 麻 痺 患 者が起立動作に失 敗す る 運動 学的
・
運動 力 学 的 特 徴 405 で あ る。
今回,
試行F
で こ の ような 両 股関節の協調 的 な遠 心 性 収 縮が行わ れ な かっ た ことがCOM
の ス ムー
ズ な 前 方 移動を 阻害し た と考え る (図6
)。
片 麻 痺患者で は,
下 肢 筋に遠 心 性 収 縮 が要 求 され る場 面において異 常 な筋 活 動が 生 じる こと が報 告さ れてい る 21)。 試 行S
で は,
コン トロー
ルが行い やすい非 麻痺側 股関節伸 展 筋へ の依 存 を高め,
麻 痺 側下肢へ の負 荷 量 を滅 弱 させたこと が 両 側の股 関節の協調 的 な遠 心 性 収縮 を可能と し た と考 えら れ る。
そ し てこれ が離 殿後の非麻痺側 股関節 伸展 モー
メン トの ピー
ク値の みを上昇させ た一
因で あ る と考 え る。
臨床では,
麻 痺 側 下肢が動 作に協 調して参 加しない こ と で,
起立や歩行に おけるCOM
の移 動 を 阻害 する こ と を多 く経 験しており,
今 回の結 果はそれ ら臨床 体 験と合 致 する結 果であっ た。 しか し,
本 研 究結 果 は起 立 時の麻 痺 側 下 肢の使 用 を否 定 するものでは ない。
動 作 時に麻 痺 側下肢 を使 用し ない ことの習慣化は姿勢の非 対 称 性 を増 悪させ る恐れ があ り,
姿 勢の非対称性が動作の非効率性 を 引 き起こすことが報 告さ れて い る4)22)。
麻痺側下肢 機能が姿勢の非 対称性に関係し てい る報 告22)23)や,
荷 重の非 対称性を改善させ る治療を行うこ と で,
起 立動 作 能 力が向上する とい う報告24)が散見さ れ,
麻痺側 下肢 の参 加と対 称 性の改 善 が起 立 動 作 能 力の向上 に は重 要で あることがわかる。 また,
片 麻 痺 患 者の動 作 時の筋 活 動に関する先 行 研 究 とし てt
能 力が高 くな る に し た がっ て麻痺側 股 関節パ ワー
が正 常に近づくこと25)や,
求 心性 収 縮 力より も遠 心性 収 縮 力の方が障 害さ れに く く,
訓 練 効 果が期 待で き る26 )とい っ た報 告がある。 よっ て今 後,
麻 痺 側の股 関 節 伸 展 筋の改善が起立 に及ぼす 影 響 も分析 する こ とでt
起立動 作に失 敗し た患 者が,
麻 痺 側 股 関節 伸 展 筋に対 す る過 負 荷 を減 じるた めの代 償 動 作として非 麻 痺 側 股 関節 伸 展モー
メ ン トを増 大 させたのか 否 かにつ いて検 証 する 必 要が ある と考 える。 今 回,
離 殿に失 敗 する起 立 動 作の特 徴 と して,
離 殿 時 の非 麻痺 側の股 関 節 伸展モー
メ ントが小 さい こと に加 え,
両 股関節 伸 展 筋の協調的 な活 動が 欠如 する ことで,
Xcom の前 方へ の推 進が阻害 され,
後 方へ 着 殿 して しま うこ と が わ かっ た。
よっ て,
起 立時の転 倒 予 防に対 する治 療 的 着眼点と して は,
着座動 作な どで股 関 節 伸 農 筋 群の遠 心 性 収 縮 を促 すこ とや,
キャ ス ター
つ きのテー
ブル を前 方 へ 押 すな どの方 法で,
前 方へ のCOM
移 動 速 度 を上げる こ とが 重要である と考える。
今 後そ れ ら練 習の有 効 性 も 検 証してい くこ とで,
なぜ離殿に失 敗 する のかにつ い て の問題 を よりあき ら か にする 必要がある と考 える。 結 論 本 研 究で は,
三次元動作解析装 置と床 反 力 計を用い て,
片麻痺患者が起立 に失敗し た と き と成 功し た と き の 動作を計測し た。
解析は,
COM とBOS の関係だけでな く,
動 的バ ラ ン ス指 標Xcom や関節モー
メ ン トを用い て,
動 的安 定性の視 点 か ら分析 を行っ た。 その結 果,
起 立に 成 功し た ときに はXcom
が足関節 中 点よりも前 方へ 移 動 し てい るこ と が わ かっ た。
この結果に関節モー
メン トや 関節パ ワー
の分 析 を加 味し て考 えると,
Xcom
を前 方へ 移動さ せ る た め に,COM
の前 方への加 速 を 阻害し ない ような両 股 関節の協 調 的 な遠心性 収 縮が 重要であること が わ かっ た。
そのた め,
このような起立 に失敗をきたす 症 例に は,
COM の前 方 移 動 速 度を 上げる よう な股 関 節 伸 展 筋の使い方 を指 導 する必 要性 が 示 唆 された。 謝 辞 :本 研 究 を行 うにあたり.
解 析モデルにつ い て ご助 言 を くだ さっ た 国 際 医 療 福 祉 大 学 大 学 院の山本 澄 子 教 授 計 測の補 助 とし て参 加し てい ただいた当 院三次元動 作解析チー
ムの皆様に 心 より感 謝 申し上げます。
文 献 1)村田 伸,
大田 尾浩,
他1 虚弱 高 齢 者 用10秒 椅 子立ち上 がりテス ト (Frail CS−
10)とADL との関 連.
理 学 療 法科 学.
2011;26:101−
104.
2) 杉 原敏 道,
三島 誠一,
他 :高 齢 者の起 立 動 作 能力 と排 泄の 自 立度につ いて,
理 学 療 法 科 学,
2007;22:89−
92.
3)Hirschfeld H:Cobrdinated ground forces exerted by buttocks and feet are adequately programmed for weight
transfer during sit
−
to−
stand.
J
Neurephysiol,
1999;82:3021
−
3029.
4)長田悠路,
山本澄子,
他 :脳 卒 中 片 麻 痺 患 者の起立動 作に お け る運 動 学 的・
運動 力 学的 評価 指標,
理学療法 学.
2012; 39:149−
158.
5) 浅 井葉 子,
金子 誠 喜,
他 :椅 子 か らの立 ち上 が り動 作にお ける体 幹 前 傾 角 度と下 肢 関 節モー
メ ント との関係.
日本 保 健 科 学 学 会 誌 2005;8:51−
58.
6)Scarborough DM
,
McGibbon CA,
et al: Chair risestrategies in elder adults with functional limitations
.
J
Rehabil Res Dev
.
2007;44:33−
42.
7)藤 澤 宏幸
,
武田涼子,
他 1立 ち上 が り動 作に おける相互作 用 トルク の寄 与
.
バ イ オ メ カニ ズム学会 誌.
2010;34:240
−
247.
8)Hughes M
,
Schenkman M;Chair rise strategy in the functionally impaired elderly.
J
Rehabil Res Dev.
1996:33:409
−
412.
9)Schenkman M
,
Rlley P,
et al.
:Whole−
Body Movements During Rising to Standing fQm Sitting.
Phys Ther,
1990; 70:638−
651.
10)Moxley Scarborough D
,
Krebs DE,
et α1.
:Quadriceps
muscle strength and dynamic stability in elderly persons.
Gait Posture
.
1999;10:10−
20.
11)Pavol MJ
,
Runtz EF,
et al.
:Diminished stepping responseslead to a fall following a nQvel slip lnduced during a sit
−
to
−
stand Gait Pesture.
2004;20:154−
162.
12>Hof AL
,
Vermerris S,
et al:Balance responses to lateral perturbations in human treadmill walking.
J
Exp Biel.
2010:213:2655−
2664.
13)Hof AL
,
Gazendam M,
et al.
:The condition for dynamicstability
.
J
Biomech.
2005:38:1−
8.
406 mp\utth7ag 41tsng7
in walking/ experimental finclingsinnormal subjects and above-knee amputees. GaitPosture.2007;25/250-258.
15)HireseM, Ogawa K/ Honda humanoicl robots
rnent. I'hilosTrans A Math Phys Eng ScL 2007;365/
11-19,
16)
Mtnxum,
"ittg
izMp-ftth
ef'Jvo7tu y'-e:g gu L-v7d
Fv;t{v
Fa)Ree im{t・M-IJsw.H7Fiurt£v F".A;-'ES.2006[24:74-83.17)Song
J,
SigwarclS,et al./ Attered dynamic pesturalcontrol duringstep turning inpersons with early-stage Parkinson'sdisease.ParkinsonsDis.2012:1-8.
18) Lugade V, Lin V, et al: Centerof mass and base of
support interactioncluringgait.GaitPosture.2011;33: 406-411.
19) Moraes R,AllardF,et al./ ValidatingDeterminants foran
Alternate Foot Placement SelectionAlgorithmDuring
Human Locomotion in Cluttered Terrain Vatiduting Determinantsferan AlternateFoetPIacementSelection
Algorithm During Human Locomotion inCluttered Terrain,
J
Neurophysio].2007/98:1928-1940.20)GatesDH,SeettSJ,etal./Frontalplanedynamicmargins
of stability inindividualswith and without transtibial
amputatien walking on alooserock surface. GaitPosture.
2013:38:570-575.
21) SvantessonU,OsterbergIJ/The standing heel-risetest inpatientswith upper motor neuron lesionduetostroke.
Scand
J
Rehabil Med, 1998;30:73-80.22) Lomaglio MJ, Eng JJ:Muscle strength and
bearing symmetry retate to sit-to-stand performance in
individualswith stroke. GaitPosture.2005:22:126-131, 23) GenthonN,Rougier P,et al: Contribution of each lower
limbto upright standing instroke patienLs.Stroke.2008; 39i1793-1799.
24) Cheng PT, Wu SH,et al./ Symmetrical body-weight
distributiontraininginstroke patientsand itseffect on
fatlprevention.Areh Phys Med RehabiL2001;82: 1654,
25)OhieyS,RichardsC/Hemipareticgaitfolluwingstroke.
PartI:Characteristics.GaitPosture,1996;4:136-148. 26)
CLark
DJ,CondtiffeEG,et al: Activationimpairment atters muscle torque-veLocity inthe kneeextensors ofpersons with pest-strokchemiparesis.ClinNeurophysioL
2e06;117/2328-2337.
<Abstract>
Kinetie and Kinematic Features of FailedSit-to-stand[[rials
in
Analysis Using a Dynamic Balance indexStroke
Patients:
Yuji
OSADA,
PT,Masako FUCHL OTSeiai
Rehabilitation
HbspitalPurpose: The purpose of thisstudy was toinvestigatethe featuresof failedsit-to-stand by analyzing
the
differences
between
accomplished andfailed
taskin
stroke patlents,Methods: From 136stroke patients
in
whom sit-to-stand was measured using a threedimensionalmotion analysis system and forceplates,7who fai]edinone sit-lo-stand trialbutsucceeded inanother
trialwere extracted
for
cornparative analysis. Differencesinthc followingkineticandkinematjc
data
were comparedbetween
the
failedand accomplished trialsby the nonparametricWilcoxon
signed-rank test:displacement
of the center of mass(COM),
center of pressure,extrapolated center ofmass(Xcom},
and peakjoint
moments.Results:
In
the accomplished trials,Xcom moved significantlyfurther
forward
over the anklecompared with the
failed
trialsat liftoff.The peak hip extension moments was increasedin
aceornplished trialswhile transitioningfrornsittingto standing.Conclusions:
Because
Xcom
could not move forward sufficiently,COM
wasforced
backwarcl
tocompensate