DOI: http://dx.doi.org/10.14947/psychono.34.17
ロボットの表情とコミュニケーション
橋 本 卓 弥
電気通信大学
Human-robot communication mediated by facial expressions
Takuya Hashimoto
The University of Electro Communications
In interpersonal communication, people exchange informatin, feelings, and intentions not only by verbal mes-sage but also by non-verbal mesmes-sages such as facial expressions, gestures, posture, and tone of voice. In particular, cial expression are considered to play a important role among non-verbal media. Focusing on the importance of fa-cial expressions in face-to-face communication, sofa-cial communication robots which can disply fafa-cial expressions have been developed. This paper gives outline of Android Robot SAYA that can express human-like facial expres-sions first. Then, the face robot that resembles a real female and is able to mimic her facial expersexpres-sions is introduced. Finnally, a receptionist system and an educational system are introduced as examples of practical application of SAYA.
Keywords: android robot, facial expression, receptionist, education, HRI (Human-Robot Interaction)
は じ め に 近年,人間と生活空間を共有し,人間と関わり合いな がら人間の生活を支援するロボットの研究開発が盛んに 行われている。このような,所謂コミュニケーション・ ロボットにおいては,人間と如何にして円滑なコミュニ ケーションを実現するかが大きな課題となる。ここで, 人間同士の対面コミュニケーションに目を向けてみる と,人間は,言語情報だけでなく,表情や視線,身体動 作といった非言語情報も用いることで円滑なコミュニ ケーションを実現していると言われている。この非言語 情報の中でも,特に,喜怒哀楽といった人間の情動を表 す顔表情は重要だと言われている(黒川,1994)。そこ で,この顔表情の重要性に着目し,人間との円滑なコ ミュニケーションを実現するために,コミュニケーショ ン・ロボットの表情に関する研究がいくつか行われてい る(Breazeal & Scassellati, 1999; Kanoh, Kato, & Itoh, 2004; 三輪・高信・高西,2002)。これらの研究では,表情を 効果的に表現するために,特徴的な部位に注目してロ ボットの顔をデフォルメし,頭部全体の動きや目,眉, 唇などの部位を変化させることで表情の表出を実現して いる。これらのロボットの外見は,一見して機械とわか るものであったが,その一方で,人間に似た顔や皮膚の 質感を持った顔ロボットの開発も行われており,顔の 筋肉の動きを基にした自然な表情表出が実現されてい る(Hashimoto, Hiramatsu, Tsuji, & Kobayashi, 2006; 小林・ 原,1996; 小林・原・内田・大野,1994)。そして,橋 本・平松・辻・小林(2007)は,この人間のような表情 表出機能をもつ顔ロボットの技術を応用し,人間に酷似 したアンドロイド・ロボットSAYAの開発を行っている。 本稿では,まず,アンドロイド・ロボットSAYAの構造 や表情の表出メカニズムについて概説する。次に,この アンドロイド・ロボットの技術を応用し,実在の人間に 酷似したロボットの開発を行ったので,その概要を紹介 する。さらに,アンドロイド・ロボットの実用的なアプ リケーションとして,受付システムや教育システムに関 する取り組みを紹介する。 アンドロイド・ロボットSAYAの概要 アンドロイド・ロボット SAYA (以下,SAYAとする) の外観をFigure 1 (a)に示す。図に示すように,本物の Copyright 2015. The Japanese Psychonomic Society. All rights reserved. Corresponding address: Department of Mechanical
Engi-neering and Intelligent Systems, Graduate School of Infor-matics and Engineering, The University of Electro-Commu-nications, 1–5–1 Chofugaoka, Chofu, Tokyo 182–8585, Japan. E-mail: [email protected]
人間に酷似した姿形を実現しており,一見しただけでは 人間なのかロボットなのか見分けがつかない。 表情表出メカニズム
SAYAによって人間のような表情表出を実現するため に,Ekman & Friesen (1978)によって開発されたFACS (Facial Action Coding System)を参考にしている。FACS
は,人間の顔の動きを客観的に記述するために開発され たものであり,解剖学的知見に基づいて顔面上に現れる 動きをAU (Action Unit)と呼ばれる最小の動作単位に分 解している。AUは全部で44種類あるが,それぞれの AUの動作は独立しており,いくつかのAUを組み合わ せることでさまざまな表情を記述することができる。 SAYAでは,万国共通の表情と言われる6基本表情(驚 き,恐怖,嫌悪,怒り,幸福,悲しみ)を表出するため に14種類のAUを用いており,その14種類のAUを実現 するために顔面上に 19 箇所の制御点を設けている。 SAYAの皮膚の裏側には,制御点に対応する位置にコネ クタが付いており,これを後述のMcKibben型人工筋で 引っ張ることにより表情を制御する。この方法で表出さ れたSAYAの6基本表情はFigure 1 (b)に示す通りで,被 験者を用いて表情の認識実験を行ったところ,静止画像 を用いた場合で92.9%,動画像を用いた場合で97.4%と いう高い認識率が得られた(Hashimoto et al., 2006)。 表情以外の非言語動作 SAYA は 全 部 で 25 自 由 度(表 情: 19, 頭 部: 4, 眼 球: 2)を有しており,表情以外にも,頷きや首傾げ, 首振りといった人間と同等の頭部の動作が可能である。 また,眼球を上下左右方向に向けることができ,視線に よるコミュニケーションも可能である。 アクチュエータ SAYAの表情や頭部の動作を制御するためのアクチュ エータとして,空気圧で伸縮するMcKibben型人工筋肉
(Chou & Hannaford, 1996)と呼ばれる空気圧アクチュ エータを用いている。このアクチュエータの大きな特徴 は,一般的なDCモータなどに比べて出力質量比が大き く,軽量でありなが大きな力を出せることである。ま た,柔軟な構造をしているため,SAYAの頭部のような 曲面にも配置することが可能である。なお,眼球動作の 制御にはRCサーボモータを用いている。 実在の人間をモデルとした アンドロイド・ロボットの開発 前述のSAYAでは,特にモデルとなる人物がいなかっ たため,SAYAがどの程度人間に似ているのかを評価す ることが難しかった。そこで,アンドロイド・ロボット の実在感を高めるために,実在の人間をモデルとした新 しい顔ロボットの開発を行った。 ライフマスクの制作と制御点の追加 本研究では,まず,20代の女性にモデルになっても らい,歯形を取る際に用いられる印象材や石膏を用いて 顔型を取り,ライフマスクを制作した。次に,モデルの 表情を顔ロボットで再現するために,モデルとなった女 性の表情の変化を分析した。ここでは,6基本表情につ いて,中立の表情から“ある表情”(6基本表情の内の1 つの表情)まで連続的に変化する様子をビデオで撮影 し,女性の表情が変化する様子を分析した。その結果, 前述の19箇所の制御点では女性の表情の変化を忠実に 再現することが難しかったため,制御点を32箇所に増 やした。 動的表情表出の再現 顔ロボットで女性の動的な表情の変化を再現するため に,撮影した動画像を用いて,女性の顔の特徴点の時系 列変化(時間–変位関係)を調査した。ここでは,顔の 動きをよく表現でき,比較的安定かつ容易に抽出できる 点として,崔・原島・武部(1991)が表情分析に用いた 7 つの特徴点を用いた。そして,得られた特徴点の時 間–変位関係を基に,32箇所の制御点の目標変位量を求 め,同時に,その目標変位量を実現するためのMcKib-ben型人工筋肉への入力圧力パターンを求めた。これを 6 基本表情すべてについて行い,表情ごとのフィード フォワードデータを取得した。 以上の結果を用いて,顔ロボットによりモデルとなっ Figure 1. Android robot SAYA and 6 basic facial
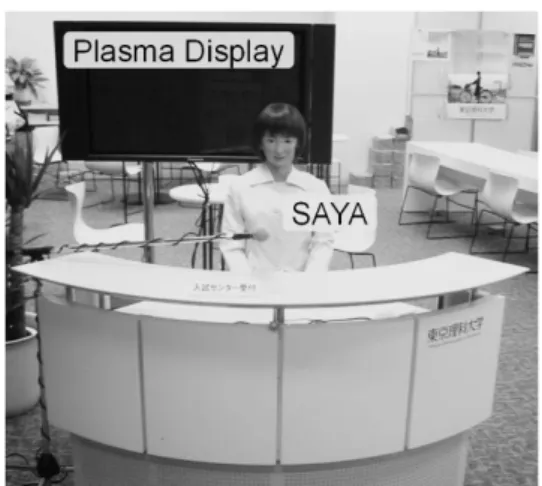
た女性の 6基本表情を再現した様子をFigure 2に示す。 顔上の特徴点の時間–変位関係をモデルの女性のものと 比較した結果,モデルの表情表出過程を精度よく再現で きていることを確認した(Hashimoto, Hiramatsu, & Ko-bayashi, 2008)。また,被験者を用いた表情の認識実験で は,平均で81.1%となり,各表情とも高い認識率が得ら れ て い る こ と を確 認 し た(橋 本・ 平 松・ 辻・ 小 林, 2009)。 アンドロイド・ロボットを応用した コミュニケーション・システム アンドロイド・ロボットSAYAの表情を長期間安定し て表出できるようになったことから,SAYAを応用し, 実験室を飛び出して実世界で活躍することができるコ ミュニケーション・ロボットの開発を目指した。その例 として,受付システムおよび教育システムの取り組みを 以下に紹介する。 受付システム(ロボット受付嬢SAYA) 将来的に,実世界で人間と関わり合いながらサービス を提供するコミュニケーション・ロボットには,人間と 円滑に対話できる能力が求められる。一方,人工知能に 関する研究は盛んに行われていたものの,未だロボット が人間と自由に会話することは技術的に困難であり,あ らかじめ会話のシナリオを用意し,そのシナリオに沿っ て会話する必要がある。そこで,比較的会話のシナリオ を作り込みやすいという観点から受付案内業務に着目 し,実用的なコミュニケーション・ロボットとして,世 界で初めてアンドロイド型の受付システムを開発し,大 学の窓口にて運用を行った(Figure 3)。 この受付システムでは,表情表出機能に加えて頷きや 視線などの非言語機能を実装した。特に,頷きに関して は,人間同士の会話において言葉や意図を強調したり, 発話リズムや会話の流れを調整したりする働きがあると 言われる“話し手の頷き”(メイナード,1993)に注目 し,発話中に頷く仕草を実装した(橋本・平松・辻・小 林,2007)。視線に関しては,SAYAの眼球内に内蔵され たCCDカメラを用いて,画像処理により来訪者を認識 し,来訪者の方に視線を向けられるようにした。その 他,音声対話機能(音声認識および音声合成)を実装し, 来訪者と言葉で会話できるようにした。 受付コンテンツの制作に当たっては,大学の窓口にお ける受付案内業務として,大学・キャンパス案内,学 部・学科案内,事務室・研究室の案内,SAYAの自己紹 介,といった内容を用意した。なお,事務室や研究室の 所在地を案内するために,CGによる経路案内機能も実 装した。また,この受付コンテンツを変えることによ り,大学だけでなく,百貨店のイベントや展示会などで も案内役として活用した。 このロボット受付嬢SAYAは,身近に接すことができ るロボットとして近隣の人々からも親しまれ,何度も足 を運ぶ高齢者や子供たちの姿が見られた。 教育システム(先生ロボット) コミュニケーション・ロボットを人間社会に参加させ るような試みは,現在,教育現場においても行われてい る(神 田・ 平 野・ イ ー ト ン・ 石 黒,2004; Tanaka, Cicourel, & Movellan, 2007; 鳥山・迫田・西原・中野, 2005)。例えば,鳥山他(2005)では,遠隔授業におけ る先生の代役として人間型のロボットを用いており,大 学生を対象として講義を実施し,従来の遠隔授業システ ムとの比較を行うことで,その有効性を検証している。 また,神田他(2004)では,英語しか話さない人間型ロ ボットを小学校の教室の中に置き,小学生との長期間 (2週間)の相互作用を分析するとともに英語学習への 動機を高める効果があるかどうかを検証している。特 に,この研究で興味深い点は,2週目の初めには児童の ロボットに対する興味が低下してしまったものの,初期 の段階では児童はロボットに興味を示し,積極的に相互 作用を行ったということである。つまり,短期間であれ ば,児童にロボットへの興味を持たせ,ロボットとの学 習に惹きつけさせるような効果があると考えられる。こ Figure 2. Six basic facial expressions by the Face Robot
のことから,教育現場,特に小学校などの低年齢層にお いては,ロボットから教わる,或いはロボットと共に学 ぶということも効果的な教育的経験となることが期待で きる。 以上のような観点から,現在,アンドロイド・ロボッ トSAYA を先生役に用いた教育システムを提案してお り,実際の教育現場,特に小学校にて授業を行っている (Hashimoto, Kato, & Kobayashi, 2011)。この教育システム では,操作者(オペレータ)は簡単な操作画面を通して 遠隔でSAYAの表情や視線,発話を操作でき,見かけ上 は自律的に児童と会話できるようになっている。例え ば,説明中は教室全体を見渡す動作を行い,指名する際 には特定の児童に目を向けるような動作を行うことがで きる。また,児童を励ましたり注意したりする際に, 「頑張って」や「静かにしてください」といった発話と 同時に“幸福”や“怒り”の表情を表出することにより, 表情を介したコミュニケーションも可能である。なお, 操作者の声はボイスチェンジャーを通してSAYAの声に 変換され,その音声に合わせてSAYAの口が開閉するよ うになっている。また,教室の前方には大型ディスプレ イを置き,音声だけでなく静止画や動画なども用いて説 明できるようになっている。 実際に授業を行うに当たり,小学校 4∼6年生の理科 の授業を対象に,いくつかの単元に関する授業のシナリ オを用意した。操作者は,この授業シナリオに基づいて 授業を進行し,重要な説明や発問,指示を行う。授業シ ナリオの例として,例えば「おもりのはたらき(ふり こ)」の授業では,まず,授業の初めに SAYAによる自 己紹介と授業内容に関する簡単な説明を行う。次に,児 童に質問しながら身の回りにある「ふりこ」の例につい て考えさせる。そして,簡単な実験を通して「ふりこ」 の原理を体験してもらい,最後に授業のまとめを行う。 1回の授業は約30分である。 実際の授業の様子をFigure 4に示す。授業中,ほとん どの児童はSAYAの説明に耳を傾け,指示に従いながら 実験などを行っていた。また,SAYAの問いかけなどに 対して積極的に手を挙げたり発言したりする様子が見ら れた。授業の序盤では,SAYAに名前を呼ばれたり視線 を向けられると驚く児童もいたが,終盤になると, SAYAに指名されようとして手を挙げながらSAYAに呼び かける児童や,名前を呼ばれないと残念そうにする児童 の様子も見られた。 ま と め 本稿では,まず,人間のような表情表出が可能なアン ドロイド・ロボットSAYAについて,その構造や表情の 表出メカニズムについて概説した。次に,実在の人間に 酷似したロボットの開発について述べ,最後に,アンド ロイド・ロボット SAYAを実世界に応用した例として, 受付システムと小学校における教育システムについて紹 介した。 近年,家庭内で活動するロボットが注目を浴びてお り,近い将来,ロボットは人間にとって非常に身近な存 在となることが予想される。人間とロボットが共存する 社会では,ロボットが如何に人間と円滑にコミュニケー ションをとれるかが大きな鍵となる。その1つの有効な 手段として,本稿で述べた顔表情を介したコミュニケー ションが考えられるが,ロボットの表情が人間に与える 心理的影響に関する検討は未だ十分に行われていない。 それには基礎心理学研究との融合が必要不可欠であり, Figure 3. Receptionist system using Android Robot
SAYA.
Figure 4. Education system using Android Robot SAYA.
そこから様々な応用研究へと繋がることが期待できる。
引用文献
Breazeal, C., & Scassellati, B. (1999). How to build robots that make friends and influence people. Proceedings of the 1999
IEEE/RSJ International Conference on Intelligent Robots and Systems, 858–863.
Chou, C. P., & Hannaford, B. (1996). Measurement and Mod-eling of McKibben Pneumatic Artificial Muscle. IEEE
Transactions on Robotics and Automation, 12, 90–102.
Ekman, P., & Friesen, W. V. (1978). Facial action coding system:
A technique for the measurement of facial movement. San
Francisco: Consulting Psychologists Press.
Hashimoto, T., Hiramatsu, S. Tsuji, T., & Kobayashi, H. (2006). Development of the Face Robot SAYA for Rich Facial Ex-pressions. Proceedings of the SICE-ICASE International Joint
Conference 2006, 5423–5428.
橋本卓弥・平松幸男・辻 俊明・小林 宏(2007).ロ ボット受付嬢SAYAを用いたリアルなうなづきに関す る研究 日本機械学会論文集C編,73, 3046–3054. (Hashimoto, T., Hiramatsu, Y., Tsuji, T., & Kobayashi, H.
(2007). Research on realistic nod with receptionist robot SAYA that has human-like appearance. Transactions of the
Japan Society of Mechanical Engineers Series C, 73, 3046–
3054.)
橋本卓弥・平松幸男・辻 俊明・小林 宏(2009).ラ イフマスクを用いた顔ロボットによる動的表情表出 日本機械学会論文集C編,75, 113–121.
(Hashimoto, T., Hiramatsu, Y., Tsuji, T., & Kobayashi, H. (2007). Dynamic display of facial expressions on the face robot with a life mask. Transactions of the Japan Society of
Mechanical Engineers Series C, 75, 113–121.)
Hashimoto, T., Hiramatsu, S., & Kobayashi, H. (2008). Dy-namic display of facial expressions on the face robot made by using a life mask. Proceedings of 8th IEEE/RAS
Interna-tional Conference on Humanoid Robots, 521–526.
Hashimoto, T., Kato, N., & Kobayashi, H. (2011). Develop-ment of remote education system with android robot and evaluation. International Journal of Advanced Robotics
Sys-tems (Assistive Robotics),8, 51–61.
Kanoh, M., Kato, S., & Itoh, H. (2004). Facial expressions us-ing emotional space in sensitivity communication robot “Ifbot”. Proceedings of the 2004 IEEE/RSJ International
Conference on Intelligent Robots and Systems, 1586–1591.
神田崇行・平野貴幸・ダニエル イートン・石黒 浩 (2004).日常生活の場で長期相互作用する人間型対話
ロボット: 語学教育への適用の試み 日本ロボット学
会誌,22, 636–647.
(Kanda, T., Hirano, T., Eaton, D., & Ishiguro, H. (2004).
Participation of interactive humanoid robots in human society : Application to foreign language education. Journal
of Robotics Society of Japan, 22, 636–647.)
黒川隆夫(1994).ノンバーバルインタフェース オー ム社 (Kurokawa, T.) 小林 宏・原 文雄・内田 豪・大野宗久(1994).ア クティブ・ヒューマン・インタフェース(AHI)のた めの顔ロボットの研究―顔ロボットの機構と6基本表 情の表出― 日本ロボット学会誌,12, 155–163. (Kobayashi, H., Hara, F., Uchida, G., & Ohno, M. (1994).
Study on face robot for active human interface ― Mechanisms of face robot and facial expressions of 6 basic emotions―. Journal of Robotics Society of Japan, 12, 155– 163.)
小林 宏・原 文雄(1996).顔ロボットにおける6基 本表情の動的実時間表出 日本ロボット学会誌,14, 65–73.
(Kobayashi, H., Hara, F. (1996). Real time dynamic control of 6 basic facial expressions on face robot. Journal of
Robotics Society of Japan, 14, 65–73.)
メイナードK泉子(1993).会話分析 くろしお出版 (Maynard, K. S.) 三輪洋靖・高信英明・高西淳夫(2002) 人間との情緒 的コミュニケーションを目的とした人間形頭部ロボッ トの開発: 第1報,表情表出機構と視覚系の構築 日 本機械学会論文集C編,68, 3353–3360.
(Miwa, H., Takanobu, H., & Takanishi, A. (2002). Development of a human-like head robot for emotional communication with human (1st Report, Development of facial expressions and visual sensation). Transactions of the
Japan Society of Mechanical Engineers Series C, 68, 3353–
3360.)
崔 昌石・原島 博・武部 幹(1991).顔の3次元モ デルを用いた顔面表情の分析 電子情報通信学会論文 誌D-II, J74, 766–777.
(Choi, C. S., Harashima, H., & Takebe, T.)
Tanaka, F., Cicourel, A., & Movellan, J. R. (2007). Socialization between toddlers and robots at an early childhood educa-tion center. Proceedings of the Naeduca-tional Academy of Sciences
of the USA, 104, 17954–17958.
鳥山朋二・迫田勝理・西原 功・中野愼夫(2005).人 間型ロボットを用いた遠隔授業支援システムの構築 電子情報通信学会論文誌,J88-D1, 451–461.
(Toriyama, T., Sakota, K., Nishihara, I., & Nakano, M. (2005). Construction of a remote class support system with humanoid robot. The IEICE Transactions on Information