1
第
1章 序論
1.1 背景
宇宙開発に大いに注目が向けられている現代において,ミッションの多様化 に応じた衛星の小型化が進められている.小型化のメリットとして,低コスト, 開発期間の短縮などが挙げられる(1-1).一方,搭載できる推進剤が制限されるた め,推進剤が衛星の運用に大きく影響するという欠点が挙げられる.このような 問題を解決するために,小型の燃費の良い推進機が必要不可欠であり,電気推進 機が注目されている,中でも,イオンエンジンは,推力密度は低いものの他の電 気推進と比べ比推力が高いという特徴をもつことが知られている(1-2).図 1-1 に 各種推進機の推力密度と比推力の関係を示す.比推力は秒の次元を持ち,その意 味は「単位重量の推進剤で単位推力を発生させ続けられる秒数」であり,燃費の 指標として良く用いられる. 図1-1 化学推進機および電気推進機の推力密度と比推力 出典:(1-3) 渡邊祐樹,竹ヶ原春貴:イオンエンジンの作動原理および搭載 状況,Space Japan Review, No. 70, October / November 2010図 1-1 に示すように,化学推進機に比べてイオンエンジンは高い比推力を持
っていることが解る.そのため,化学推進機よりも搭載する推進剤を大幅に減ら せることが可能となり,ペイロードを稼げることができ,小型人工衛星の機能向 上に繋がる(図 1-2).しかし,化学推進機に比べ推力密度が劣るため,充分な速
2 度増分を得るためには長時間の安定動作が必要不可欠となる.よって,イオンエ ンジンの開発において耐久性評価は重要な位置を占めると同時に、長期間に及 ぶことが考えられる.イオンエンジンの耐久性評価においては,実作動による耐 久試験が実施されており(1-4),宇宙探査機「はやぶさ」に搭載されたイオンエン ジン「μ10」は 18,000 時間にわたる耐久評価試験を行った(1-5).この長期にわた る耐久性評価はイオンエンジンのミッション投入の妨げになっている(1-6). 図1-2 人工衛星の重量配分 今後,より高い耐久性を持つイオンエンジンが開発されていくことが考えら れるため,実時間作動による耐久試験は時間・コスト面において現実的ではない. そこで,実時間作動試験の代替となりえる数値計算解析の研究が精力的に進め られている.特に,耐久性の主要因であるグリッドシステムの損耗解析について は,JAXA や大学等の研究機関によって,イオンアクセルグリッド耐久認定用解 析(JIEDI)ツールが開発され,日々改善されている(1-7).しかしながら,その解析 妥当性は,長時間動作前後の形状変化から類推的に検証するしか無く,検証件数 の不足が問題となっている.そこで,短時間でグリッドの損耗を評価できるシス テムの開発に成功すれば,様々な動作条件での検証データを多く取得できるこ とが期待できる.
3
1.2 目的
本研究ではJIEDI ツールの検証データの取得のために,グリッド表面から削
り飛ばされるスパッタ粒子からグリッドの損耗状況をモニタリングできるシス テムを開発することを目的として,以下のことを行った.
1) Cavity Ring-Down Spectroscopy (CRDS)を用いた耐久性評価システム開 発 2) 当研究室で開発したイオンエンジンを使用して構築した評価システムの 有効性の確認 イオンエンジンの耐久性限定要因であるスパッタリングによるアクセルグリ ッドの損耗に焦点を当て,本研究を進めていく.グリッド損耗については第2 章 において説明する. 1)については,グリッド表面からスパッタリングによって弾き飛ばされたグリ ッド材の原子を測定する計測システムを開発する.グリッド構成原子の数密度 からグリッドの損耗量を導き出し,損耗状況をモニタリングする.グリッド材料 にモリブデンを使用していたが,近年では,低スパッタ率で熱膨張がほぼ 0 の カーボン・カーボン複合材をグリッド材料に使用するのが主流となっている.そ のため,グリッドから飛び出す原子数は微量となり,従来の計測方法では精度が 充分ではない.そこで,レーザー吸収分光法の発展手法である Cavity Ring-Down Spectroscopy (CRDS)を採用した.CRDS の詳細な原理については第 3 章 において説明する. 2)については,アルミニウムでできたグリッドを用いた計測を行い,構築した CRDS 評価システムの動作,妥当性の確認を行った.
4 参考文献 (1-1) 茂原正道,鳥山芳夫:衛星設計入門,培風館(2002) (1-2) 荒川義博,國中均,中山宜典,西山和孝:イオンエンジンによる動力航行, コロナ社(2006) (1-3) 渡邊祐樹,竹ヶ原春貴:イオンエンジンの作動原理および搭載状況,Space Japan Review, No. 70, October / November 2010
(1-4) 早川幸男,北村正治:キセノンイオンエンジンの地上設備における運転と 評価法,航空宇宙技術研究所資料 752 号(2000)
(1-5) 國中均:「はやぶさ」小惑星探査機に搭載されたマイクロ波放電式イオン エンジン,J. Plasma Fusion Res. Vol.82 No.5(2006), pp.300-305
(1-6) 中野正勝,梶村好宏,船木一幸:JIEDI-1 の開発(イオンエンジングリッ ド損耗評価コードの改良),イオン加速グリッド耐久認定用数値解析 JIEDI(JAXA Ion Engine Development Initiatives)ツールの研究開発ワークシ ョップ論文集(2010),pp.1-9
(1-7) Masakatsu NAKANO:Sensitivity Analysis of the Effects of Doubly Charged Ions on Ion Acceleration Grid Erosion” Trans. Japan Soc. Aero. Space Sci. Vol. 55, No. 6, pp. 364-372, 2012
5
第
2章 イオンエンジン
2.1 イオンエンジンの作動原理
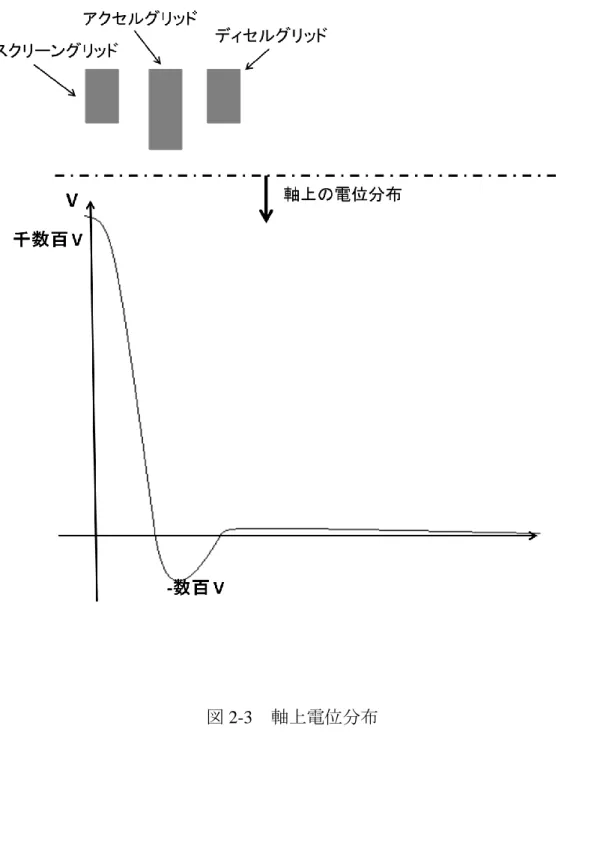
イオンエンジンの概念図を図 2-1 に示す.イオンエンジンはアーク放電やマイ クロ放電などで推進剤を加熱・電離させてプラズマを生成し,2 枚ないし 3 枚か らなるグリッドに 1000~2000 V 程度の高電圧を印可させてイオンを加速する (2-1).イオンエンジンは主に以下の 3 つの領域から構成されている. 1) 推進剤を電離するプラズマ生成部(Ionization) 2) 生成されたイオンを静電的に加速して推力を得る加速部(Acceleration) 3) 放出されたイオンビームを電気的に中和する中和部(Neutralization) 図 2-1 イオンエンジンの概念図 ここで,イオン加速部について注目する.イオンの抽出・加速のため,グリッ トと呼ばれる多孔電極によって形成されるグリッドシステム(図 2-2)によって, イオン加速し,その反作用として推力を得る.イオンエンジンの中でも最も電力 を消費する重要な部分と位置づけられる.数枚のグリッドの内,プラズマ生成部 に接するグリッドをスクリーングリッドといい,1000~2000 V の正電圧が加えら れる.スクリーングリッドの隣に設置されるグリッドはアクセルグリッドと呼6 ばれ,このグリッドは数百 V の負電圧が印加される.さらに,アクセルグリッ ドの隣にディセルグリッドと呼ばれる電位を 0 V としたグリッドが加えられる. スクリーン-アクセルグリッド間の電位勾配により,イオンを加速する.又、ア クセル-ディセルグリッド間の電位勾配は,イオンエンジン外部からの電子が 加速部への逆流を防ぐ働きがある(2-3).3 枚グリッドシステムでは,このような 構造となるが,2 枚グリッドシステムでは,ディセルグリッドが除かれ,アクセ ルグリッドと宇宙電位との間にスクリーン‐アクセル間とは逆の電位勾配を形 成し,電子の逆流を防ぐ役割を持つ.図 2-3 に軸上電位分布の概略図を示す. 図 2-2 グリッドの孔 1 つからのイオンビーム抽出 出典:(2-2) 宮本尚使:マイクロ波放電型イオンスラスタの性能向上に関 する実験的研究,九州大学博士論文
7
8
2.2 耐久性限定要因
イオンエンジンの耐久性を決める要因は,主にグリッドの損耗と中和器の性 能低下である. グリッドの損耗については,アクセルグリッド,およびディセルグリッドの損 耗が相対的に大きい.アクセルグリッドの損耗による孔の広がりは,中性粒子の 閉じ込め性能低下と,孔中心部の空間電位の上昇を引き起こす.空間電位がマイ ナス数ボルトまで上昇すれば,中和器から放出された電子が放電室内部に逆流 する.イオンと電子の移動度の違いから,放電室内部からイオンを引き出すより も電子がイオン源内に進入するほうが容易なため,この逆流電子によるイオン 源‐電源‐中和器の電流ループができてしまい,消費電力の増大をまねく.また, 2 枚グリッドシステムにおいて顕著に見られる“Pits&Grooves”と呼ばれる孔 と孔の間の領域の損耗は,極端な損耗はグリッドの機械的な破壊を引き起こし, 電極間の短絡に発展する(2-4).この原因については,次項にて言及する. 中和器の性能低下は,中和器内部の劣化に伴い起こる.性能低下を補うために, 中和器とプルーム間の電位差,これを中和器電圧と呼ぶが,この電位差を上げる. この電圧がある閾値を超えると,中和器内部は自身で生成したイオンからのス パッタリングにより激しい損耗を受け,ついには,放出されるイオンを賄うだけ の中和電子の放出が不可能となる.この状態になると,宇宙器の電位は大きく変 化し,アクセル・ディセルグリッドの過電流,グリッドや宇宙器の表面の激しい 損耗を引き起こす(2-4). このような要因によりイオンエンジン自体の性能低下・停止を引き起こし,寿 命を迎える.本研究においては,グリッドの損耗を対象とする.2.3
グリッド損耗
グリッドの損耗は,イオンまたは中性粒子によるスパッタリングによって生 じる.イオンエンジンの場合,ほとんどが電荷交換イオンによるスパッタリング である.スパッタリングとは,高速の粒子が材料表面に衝突することで,その材 料を構成する粒子が叩き出される現象であり,1 衝突粒子に対するスパッタ率 は,衝突条件によって大きく異なる(2-5).グリッドの損耗に大きく影響を与える ものは以下の通りである.各衝突の概念図を図2-4 に示す.9
2.3.1 電荷交換衝突
電荷交換衝突は,イオンと中性粒子が電荷を交換する衝突である.イオン加速 部では(2-1)式で示すように,グリッド間の電位差により加速されたイオンと,電 離せずに放電室内からグリッドの間をすり抜けた速度が比較的遅い(熱速度程 度)中性粒子が衝突して電荷を交換し,遅いイオンと速い中性粒子を生成する. 推進剤として Xe を使用した場合を次式で表す.Xefast+ + Xeslow → Xefast+ Xeslow+ (2-1)
この反応により中性粒子となった元々イオンのXefastは衝突前のイオンの速度 で直進する.直進先にグリッドが存在する場合,グリッドに衝突してグリッド損 耗の原因となる.一方,新たに電荷を得たXeslow+ の速度は熱速度程度であり,負 電位であるアクセルグリッドに向けて加速され,グリッドと衝突し損耗を引き 起こす(2-6).
2.3.2 弾性衝突
エネルギーが保存されたまま衝突後の速度ベクトルが変化する衝突を弾性衝 突と言う.速度ベクトルが変化することにより,イオンまたは中性粒子がグリッ ドに衝突する軌道を有した場合,グリッドを損耗する (2-6). 図2-4 グリッド損耗の概要(2-5) 出典:(2-5) 大川恭志,早川幸男,北村正治:グリッド損耗評価試験技術の現状,イオン加速グリッド耐久認定用数値解析 JIEDI(JAXA Ion Engine Development Initiatives)ツールの研究開発ワークショップ 2006 年度報告書
10
2.3.3 直接衝突
イオン加速系の設計が不適当あるいは意図的であれば,ビームの周辺部や収 束したビームがグリッドに衝突して損耗を与える.主流イオンビームの衝突は 電荷交換衝突や弾性衝突とは異なり,衝突粒子が数ケタ多く,イオンの持つエネ ルギーも大きいのでスパッタ量として甚大である(2-6).2.4 電荷交換イオンによるグリッド損耗
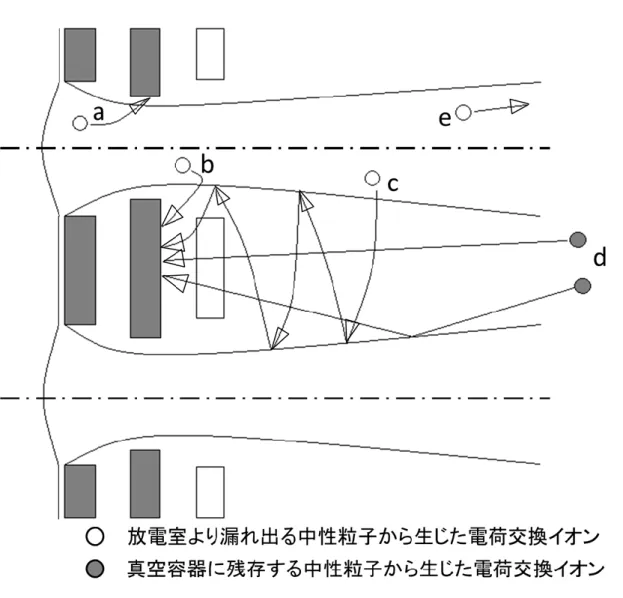
(2-3) 電荷交換衝突によって発生した低速のイオンを電荷交換イオンと呼ぶ.中野 らによると(2-3),電荷交換イオンはイオンビームが加速される領域のすべてにお いて存在する.以下,中野らによって報告されている電荷交換イオンによるグリ ッド損耗について説明する.スクリーングリッドの近くで生成した電荷交換イ オンについては発散しながら加速され,アクセルグリッドやディセルグリッド の内壁に損耗を与える(図 2-5 の a).また,アクセルグリッド周囲で電位の井戸 が出来るが,そこで生成した電荷交換イオンはアクセルグリッドに引き寄せら れる(図 2-5 の b).イオンビーム下流では,ビームの収束により中和プラズマに 対して数ボルト高い領域ができるため,その領域よりも上流で生成した電荷交 換イオンはグリッド方向に加速される.この領域内部で生成された電荷交換イ オンは半径方向に加速され,主流ビームにはじかれながらグリッド方向に向か うと考えられる(図 2-5 の c).宇宙空間における作動では,中性粒子は放電室か ら漏れ出てくるものだけであり,下流方向の速度成分を持っているため,中和プ ラズマより数ボルト高い領域をこえた電荷交換イオンはそのまま下流に流れて いく(図 2-5 の e).一方,地上試験においては真空容器中に残る中性粒子が存在 し,それらは様々な速度方向をもって分布している.これらの中性粒子のうちグ リッド方向に向かうものもある割合で存在し,それら中性粒子とイオンビーム が衝突することでグリッド方向に向かう電荷交換イオンが生じる.これらの電 荷交換イオンは,ビームとビームとの間の電位の低い領域を通ってグリッド方 向に向かっていくと考えられ(図 2-5 の d),グリッドに衝突して損耗を起こす.11
12
2.5
グリッドの損耗形状
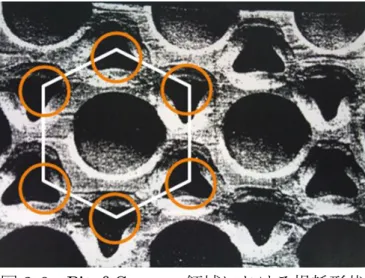
図 2-3 のイオンビーム加速部の孔一対についてみた場合の軸上電位分布から わかるように,スクリーングリッドからアクセルグリッドにかけて電位が下が り,ディセルグリッドにより電位が上がり周囲のプラズマ電位まで回復してい る.そのため,アクセルグリッドにおいて電位が最小値となり,電荷交換イオン が最も集中しやすくなっていることが分かる.また,損耗形状は 2 枚グリッド システムと3 枚グリッドシステムで異なる. 2 枚グリッドシステムに見られる損耗形状を図 2-6 に示す.孔と孔の間の 6 角 形の頂点部分の酷く損耗を受けている領域を“Pits&Grooves”と呼ぶ(2-3).これ は主としてアクセルグリッド下流側で生成した電荷交換イオン(図 2-5 の d)や, アクセルグリッド上流で生成した電荷交換イオン(図 2-5 の b)がアクセルグリッ ド下流に回り込んで衝突することにより起こる.Pits&Grooves 領域は主流ビー ムに囲まれた領域であり,この前面の領域は周囲と比較して電位が低いため,低 速の電荷交換イオンが集まりやすい. 図2-6 Pits&Grooves 領域における損耗形状出典:(2-8) J. R. Brophy, J. E. Polk and L. C. Pless:Test-to-Failure of a Two-Grid, 30-cm-dia. Ion Accelerator System, IEPC-9*3-172, Seatlle, WA,
Sep., 1993.
図2-7 に Deep space 1 に搭載された 2 枚グリッドシステムのイオンエンジン
における実時間耐久試験のグリッド損耗の写真を示す.図2-7(a)が作動から 125
時間経過したものであり,図2-7(b)が 30,352 時間経過したものである.時間が
経過することによって,六角形の頂点部分が損耗受けていることと,孔径が拡大 していることがわかる.このようなPits & Grooves の形状の損耗が続くことで
13 孔と孔の間がつながってしまい,グリッドの構造が損なわれることになる. 3 枚グリッドシステムでは,ディセルグリッドがアクセルグリッド下流で生成 し た 電 荷 交 換 イ オ ン が ア ク セ ル グ リ ッ ド に 向 か っ て く る の を 遮 る た め , Pits&Grooves 領域での損耗は起こらない.また,アクセルグリッド上流部分で 生成した電荷交換イオンが発散しながら加速され衝突することで,孔径が広が るような損耗を受ける. (a)125 時間経過 (b)30,352 時間経過 図2-7 時間耐久試験でのアクセルグリッドの損耗写真(Deep Space 1)(2-7)
出典:(2-7) John R. Anderson,Ira Katzt,Dan Goebel:Numerical Simulation of Two-Grid Ion Optics Using a 3D Code
14 参考文献 (2-1) 栗木恭一,荒川義博:電気推進ロケット入門,東京大学出版会(2003) (2-2) 宮 本 尚 使 : マ イ ク ロ 波 放 電 型 イ オ ン ス ラ ス タ の 性 能 向 上 に 関 する実験的研究,九州大学博士論文 (2-3) 中野正勝:電気推進のシステム解析と性能評価,東京大学博士論文(1999) (2-4) 細田聡史,國中均:イオンエンジンによる小惑星探査機「はやぶさ」の帰
還運用,J. Plasma Fusion Res. Vol.86 No.5 (2010) pp.282-292
(2-5) 大川恭志,早川幸男,北村正治:グリッド損耗評価試験技術の現状,イオ ン加速グリッド耐久認定用数値解析 JIEDI(JAXA Ion Engine Development Initiatives)ツールの研究開発ワークショップ 2006 年度報告書
(2-6) 船木一幸,篠原育,中野正勝,梶村好宏,宮坂武志,中山宜典,百武徹, 和田元,剣持貴弘,村本哲也,國中均:イオンエンジングリッド損耗解析 ツール JIEDI,宇宙航空研究開発機構研究開発資料(2012)
(2-7) John R. Anderson,Ira Katzt,Dan Goebel:Numerical Simulation of Two-Grid Ion Optics Using a 3D Code
(2-8) J. R. Brophy, J. E. Polk and L. C. Pless:Test-to-Failure of a Two-Grid, 30-cm-dia. Ion Accelerator System, IEPC-9*3-172, Seatlle, WA, Sep., 1993.
15
第
3章 Cavity Ring-Down Spectroscopy
3.1
Cavity Ring-Down Spectroscopy
Cavity Ring-Down Spectroscopy(CRDS)は,レーザー吸収分光法の感度を飛 躍的に向上させる方法として,様々な分野で用いられている.もともとは高反射 ミラーの反射率を正確に計測するための方法として考えられたが(3-1),1988 年に 気体中の微量元素/分子の密度測定に応用され(3-2),発展を遂げてきた(3-3). 電気推進機の分野では,コロラド州立大学において,ホールスラスタに適応し た研究が精力的に行われている(3-4,5,6,7,8,9,10).イオンエンジンへの適応は本研究 が世界初であり,とても挑戦的なテーマと言えるだろう.
3.2 測定原理
図 3-1 に CRDS の概念図を示す.高反射ミラー(反射率;R>99.9%)を向かい 合わせるように配置することによって光学キャビティを構成する.光学キャビ ティの一方のミラーからパルスレーザー光を注入すると,キャビティ内の光は わずかに光を外部に漏らしながら反射を繰り返す.この反射は,数千回繰り返さ れることで有効光路長が大幅に増加し,高感度な吸収分光法となる. 図3-1 CRDS 概念図 ミラーの漏れ光の強度は次式に示すように時間と共に単純な指数関数減衰を 示す. S(𝑡) = 𝑆0𝑒𝑥𝑝[−𝑡 𝜏⁄ ] (3-1)16 ここで, 𝑆0はそれぞれ時刻t = 0 における漏れ光強度である.減衰強度が 1/e と なる時間をリングダウンタイムと呼ぶ.キャビティ内に光を吸収する物質がな いとき,ミラーの反射率;R とリングダウンタイム;𝜏0の間には次式が成り立つ. 𝜏0 = 𝐿 𝑐(1 − 𝑅) (3-2) ここで,L は光学キャビティにおけるミラー間距離,c は光の速度である.キャ ビティ内に吸収する物質があるときとないときではリングダウンタイムが異な るため(図 3-2),キャビティ内にある物質の吸収度𝐴𝑏𝑠(𝑣)と吸収係数𝑘(𝑥, 𝑣)は, 𝜏0と𝜏から求められる. 𝐴𝑏𝑠(𝑣) = ∫ 𝑘(𝑥, 𝑣)𝑑𝑥 =𝐿 𝑐[ 1 𝜏 − 1 𝜏0] (3-3) レーザーの周波数をスキャンし,得られた吸収度のプロファイルを積分するこ とにより,レーザーの通り道上で積分された下順位の線密度∫ 𝑁𝑖𝑑𝑥が以下の式で 導かられる. ∫ 𝑁𝑖𝑑𝑥 = 𝑣𝑘𝑖2 𝑐2 8𝜋 𝑔𝑖 𝑔𝑘 1 𝐴𝑘𝑖 (∫ 𝐴𝑏𝑠(𝑣)𝑑𝑣) (3-4) 𝑔𝑖と𝑔𝑘はそれぞれ,エネルギー準位I ,k における統計重率,𝜈𝑘𝑖は遷移周波数, AkiはアインシュタインA 係数である. 本研究ではCRDS から得られる線密度に,トンプソン分布関数から得られる 粒子速度(3-4)を組み合わせることで,光軸に平行な面を単位時間に通過するフラ ックス,すなわち単位時間当たりの損耗量を求める.
17 図3-2 リングダウンタイム模式図
3.3
光学キャビティの構築
3.3.1光学
キャビティの安定性 光学キャビティは 2 枚のミラーの形状,配置によって構成されるが,感度の 高い測定を行うためにはキャビティ内でのレーザー光のロスを押さえ,効率よ く機能するように設計する必要がある.2 枚のミラーで形成される光学キャビテ ィは次にあげるパラメーターで比較的容易に議論することができる(3-9).𝑔パラ メーターは,キャビティの長さをL、ミラーの曲率半径を r とすると次のように 表される. 𝑔 = 1 −𝐿 𝑟 (3-5) キャビティの安定条件は、二つのミラーのそれぞれの𝑔パラメーターの積で次の ように表される. 0 ≤ 𝑔1∙ 𝑔2 ≤ 1 (3-6) 式(3-6)を図的に表現したものを図 3-3 に示す.例えば,二枚の曲率半径 1 m の ミラーで形成されたキャビティでは,そのキャビティの長さを2 m 以下にする と安定条件を満たす.本研究では,曲率半径1 m のミラーを使い,キャビティ18 の長さは真空容器への設置を考慮し0.55 m としている. もう一つの重要なパラメーターとしてフィネス F がある.キャビティの質を 表す指標であり,自由スペクトル領域(FSR)とキャビティ長によって決まる半値 全幅(FWHM)の比でもある.それぞれのミラーの反射率を𝑅1,𝑅2とすると,F は 次式のようになる. 𝐹 =𝜋(𝑅1𝑅2) 1 4 ⁄ 1 − √𝑅1𝑅2 (3-7) 本研究で設計したキャビティのフィネスは6281,FSR は 0.27 GHz であるの で,FWHM は 43 kHz となり,本研究で使用するレーザーの線幅 1 MHz より も小さいことがわかる.これはカップリング効率が悪いことを示しているため, 透過光が微弱になる.そのため,光電子増幅管(PMT,浜松ホトニクス社製, H10493-003)を使い,光を検出する. 図3-3 キャビティ安定設計図式
出典:(3-12)Romain QUIDANT:Trapping and cooling inside a high finesse laser cavity, prepared at ICFO, PLASMONICS AND
19 3.3.2 縦モード(3-10) ノイズのない減衰信号を検出するために,キャビティへのレーザーの結合が 重要となり,光学キャビティのスペクトルモード構造について考える必要があ る. レーザーの波面はほとんど球面波に近く,波面の曲率半径に近い曲率半径を 持つ球面鏡を2 枚向かい合せに置いたとすれば,その中でレーザーが共振する. 共振した時の周波数は,一往復した時の位相変化が2πの整数倍であれば,元の 波面と実質的に同じ位相で強めあう.光の波長を𝜆,共振器長を L とすると,そ の条件は次式となる. 2𝜋2𝐿 𝜆 = 2𝜋𝑞 (3-8) ここで,q は整数である.このとき, 𝜆 2𝑞 = 𝐿 (3-9) すなわち半波長の q 倍が共振器長と一致しており,定在波が立っている状態 であることがわかる(図 3-4).光速をc とし, 𝜈 = 𝑐 2𝐿𝑞 (3-10) 光の波長は数百 nm 程度であり、実際の共振器長よりも小さくq はかなりの 大きな数になる.この時,図3-5 のように多数の共振周波数が並び,q に応じて 縦モードが決まる,その周波数間隔は𝑐 2𝐿⁄ になっており,自由スペクトル領域 (FSR)という. 図3-4 共振器の定在波の分布
20 図3-5 共振器の縦モード 3.3.3 横モード(3-10) 一般にレーザーというと一本の細い光線をイメージするが,実際には発振器 から出てきた出力の断面をみると多くの模様が観測される(図 3-6).これを横モ ードと呼ぶ.
横モードは TEM という言い方をあてて,TEM00,TEM01,TEM11と表し,
およそのビーム断面形状を特定している.TEM とは,Transverse Electro Magnetic モード(T = 横方向,E = 電気,M = 磁気)の略で,電磁波の伝搬する 横モード(Transverse mode)を示す.TEMmn に付けられている m と n の添え 字は,m が E モード成分を表し,n が M モード成分を示して,互いに直角の成 分となる.m はビーム断面を水平に切る本数で,n は垂直に切る本数である.従 って,TEM00ではガウス分布を持った一塊のビーム断面形状になり,TEM01で は上下に二つにビームが分かれた形状となる. 横モードは共振波長に影響を与える.TEMmn モードに対する共振条件は, レーザーが最小になる点を原点にとり,反射鏡が𝑧1(<0)及び𝑧2(>0)の位置 にあるとし,共振器長を𝐿 = 𝑧1− 𝑧2とすると, 2𝜋𝐿 𝜆 − (𝑚 + 𝑛 + 1) (tan −1𝑧2 𝑧0− tan −1𝑧1 𝑧0) = 𝑞𝜋 (3-11) 𝑧0 =𝜋𝜔0 2 𝜆 (3-12) 𝑧0は出射光でのレーザーのスポットサイズである.波長𝜆は(𝑚 + 𝑛)応じてわず かに短くなる.これにより,キャビティから透過するレーザーの共振状態に統一 性がなくなり,リングダウンタイムにばらつきが生じる.
21 図3-6 TEM モードの例 出典:(3-11)http://www.anfoworld.com/lasers.html ここで,本研究にて構築した光学キャビティでの透過高強度を図3-7 に示す. スペクトルモード構造を把握しやすいように,エタロン(FSR:1.5 GHz)の信号 も示している. 図3-7 キャビティ透過光強度
22 本研究にて構築した光学キャビティのFSR は 0.27 GHz であるので,エタロン のFSR にて 5 本程度信号が出ることが予想できる.図 3-7 において,エタロン のFSR を 6 つに割くように強い信号が 5 本程度出ているのがわかる.この信号 が縦モード(基本モード)の共振光であり,縦モードに比べて弱く,縦モードの間 に 2 本程度出ているのが高次の横モード信号である.次章にて詳しく言及する が,本研究では CW レーザーを使用しているため,キャビティに入射するレー ザー光を任意のタイミングで遮蔽する必要がる.この遮蔽するタイミングは,高 次モードによるリングダウンタイムのばらつきを防ぐため,基本モードがキャ ビティに入射したタイミングで遮蔽する必要がある.よって,図3-7 のトリガー 位置に示すように,高次モードが入らない位置にてレーザー光を遮蔽する信号 を出力する.
3.4 測定限界
CRDS における測定限界は次式で求めることができる. 𝐴𝑏𝑠𝑚𝑖𝑛 ≡∆𝜏0 𝜏0 (1 − 𝑅) (3-13) ここで∆𝜏0は,キャビティ内に吸収サンプルがないときのリングダウンタイム𝜏0 の標準誤差である.測定において重要な指標である𝜏0にばらつきがあると,それ 自身のばらつきを架空の吸収体として認識してしまうため,リングダウンタイ ムの差が∆𝜏0以下の吸収を正確に測定できない.CRDS において高感度測定を行 うには,𝜏0の値を上げることと,減衰現象毎のばらつきを抑える必要がある.前 者の方法としては,ミラーの反射率を上げる方法がある.しかし,反射率を上げ すぎると,ミラーを透過するレーザー光強度が小さくなるため,比較的感度の高 い検出器を使う必要がある.後者においては,光学キャビティの構築をいかに正 確に行えるかが重要となる. 本研究で構築したCRDS の測定限界を求めてみる.図 3-8 にリングダウンシ グナルを示す.指数関数のフィッティングからリングタイムを求めることがで きる.この時の𝜏0は10.71 ± 1.39 μsとなった.標準偏差は 1000 回の計測から求 めている.この値を式(3-13)へ代入することで,𝐴𝑏𝑠𝑚𝑖𝑛≡22 ppm を得る.通常 の吸収分光法と比べ良い値ではあるが,CRDS としては良くない値であるため, 光学キャビティの調整によって更なる向上が狙える.23 10 20 30 40 50 0 1 2 3 4 測定値 Exponential fit 透過高強度 [a. u] 時間 [μ s] 図3-8 リングダウンシグナル
3.5 利点・欠点
CRDS の利点として,1)高感度測定,2)レーザー光の強度変動によらない,3) 絶対密度計測が上げられる.1)については,測定光路長を非常に長くできる点に ある.一般的に,微量粒子を測定する際はホワイトセルを使い,光路長を伸ばし ていたが,せいぜい60 回程度しか反射を繰り返さないため感度の向上としては 多くは望めない.一方,CRDS では反射率 99.95%のミラーを使うと,レーザー 光は1000 回反射を繰り返す.この時,本研究でのキャビティ長 0.55 m では, 有効光路長は1.1 km となり,従来のレーザー吸収分光法とは一線を引くほど長 くすることができる.2)については,キャビティ内に残っているレーザー光の減 衰時間を測定するためである.3)は,Beer-Lambert の法則より吸収サンプルの 絶対密度が可能である.これは,高感度計測として知られているレーザー誘起蛍 光法において困難とされている. 欠点としては,1)測定値が積分値,2)光路の調整が上げられる.1)の原因によ ってCRDS は空間分解能に劣ってしまう.そのため,本研究ではオニオンピー リングと呼ばれる手法を用いて空間密度分布を求める.詳細については第 5 章 にて言及する. 2)については,CRDS において,光学キャビティの構築は測定 限界を左右する最も重要な部分であり,レーザー光を数千回往復させるため,少 しのずれでも大きく影響してしまう.そのため,光路の調整が充分に行われない と,CRDS の利点を活かせることができなくなってしまう.24 参考文献
(3-1) D.Z. Anderson et al., April. Opt. 23, 1238(1984)
(3-2) O’Keef, D. A. G. Deacon, Rev. Sci. Instrum., 59, 2554(1988)
(3-3) 佐々木幸一:キャビティリングダウン吸収分光法によるプラズマ計
測,J. Plasma Fusion Res. Vol.91, NO.1 (2015)2-9
(3-4) Azer P. Yalin, Vijaya Surla:Determination of Number Density and Velocity of Sputtered Particles by Cavity Ring-Down
Spectroscopy”IEPC-2005-300
(3-5) Azer P. Yalin, Vijaya Surla, Casey Farnell, Mark Butweiller, and John D. Williams : Sputtering Studies of Multi-Component Materials by Weight Loss and Cavity Ring-Down Spectroscopy, 42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference &
Exhibit 9-12 July 2006, Sacramento, California
(3-6) Azer P. Yalin, John D. Williams, Vijaya Surla, Jonathan Wolf, and Kirk A. Zoerb : AZIMUTHAL DIFFERENTAL SPUTTER YIELDS OF MOLYBDENUM BY LOW ENERGY Xe+
BOMBARDMENT
(3-7) Naoji Yamamoto, Lei Tao, Binyamin Rubin, John D. Williams and Azer P. Yalin:Sputter Erosion Sensor for Anode Layer-Type Hall Thrusters Using Cavity Ring-Down Spectroscopy, JOURNAL OF PROPULSION AND POWER Vol. 26, No. 1, January-February 2010
(3-8) Azer P. Yalin, Lei Tao, Ryan Sulenberger, Masashi Oya, Naoji Yamamoto, Timothy B. Smith, Alec D. Gallimore:High-Sensitivity Boron Nitride Sputter Erosion Measurement by Continuous-Wave Cavity Ring-Down Spectroscopy
(3-9) Lei Tao : CONTINUOUS-WAVE CAVITY RING DOWN SPECTROSCOPY SENSOR FOR HALL THRUSTER EROSION MEASUREMENT”In Partial Fulfillment of Requirements For the Degree of Philosophy Colorado State University Fort Collins, Colorado(2011)
(3-10) 岡田龍雄“EE Text 光エレクトロニクス”株式会社 オーム社(2012) (3-11) http://www.anfoworld.com/lasers.html
(3-12) Romain QUIDANT:Trapping and cooling inside a high finesse laser cavity, prepared at ICFO, PLASMONICS AND NANO-OPTICS group (2012)
25
第4章
実験体系
4.1
CRDS システム
図4-1 に本研究で構築した CRDS システムを示す.レーザーの光路にそって 順に説明していき,最後に参照スペクトルについて言及する. 図4-1 (上)CRDS システム,(下)概略図26 4.1.1 外部共振器半導体レーザー レーザー光源としてTOPTICA 社の DL100prodesign を使用する(図 4-2).モ ードホップフリーのチューニング範囲は約20GHz,線幅は 1MHz 以下である. 図 4-3 に内部構造の概略図を示す.コリメートレンズと回折格子によって構 成されている共振器が内蔵されており,ダイオードレーザーによって発振され たレーザーを増幅する.回折格子にはPZT が接続しているため,電圧を変化さ せることで共振器の長さが変化し,発信周波数を変えることが可能である.印加 させる電圧は,エヌエフ回路設計ブロック社のWF1946 を使い正弦波電圧を入 力させる. 図4-2 外部共振器半導体レーザー(ECDL) 図4-3 内部構造の概略図 本研究では,パルスレーザーではなく CW レーザーを採用している.CW レ ーザーの線幅は,パルスレーザーの線幅に比べて狭いため,光学キャビティのモ ードと重なった場合を除いて入射を防ぐことができる(図 4-4).従って,個々の 縦モードとのカップリングが可能となり,高感度測定が可能となる.
27 図4-4 パルスレーザーと CW レーザーの比較 4.1.2 エタロン 得られた時系列データを周波数に変換する際に,周波数の基準となるのがエ タロンから得られた信号である. 測定中の相対周波数は,エタロンとECDL に印加する正弦波電圧から較正を とり,モニタリングを行う(図 4-5).エタロン信号の出力時の印加電圧をプロッ トしたものが図 4-5 の下のグラフとなる.プロットの横間隔はエタロンの FSR:1.5 GHz である.トリガーが入った瞬間の印加電圧をグラフに当てはめる ことにより,相対周波数を得ることができる.この較正作業は測定の度に行う.
28 図4-5 (上)エタロンと印加電圧信号 (下)周波数較正グラフ 4.1.3 AOM(Acousto-Optic Modulator) 本研究では CW レーザーを使用しているため,指数関数的減衰を示すために レーザーを一時的に遮蔽する必要がある.そこで,AOM をオプティカルスイッ チとして使用する.AOM は音響光学効果(4-1)によってレーザー光を回折させる 素子である.AOM を駆動させるドライバーの ON/OFF によって,回折の ON/OFF の切り替えが可能なので,回折一次光をキャビティへ入射するよう光 路を調整することによって,ドライバーのOFF 時にキャビティへのレーザー光 の入射を遮蔽することができる.キャビティ内にレーザー光がなくなれば,再び 回 折 に よ っ て レ ー ザ ー 光 を 入 射 さ せ る .AOM の ス イ ッ チ 速 度 は お よ そ 10~100ns で,CW-CRDS 装置に十分な速さといえる(4-2).本研究では,ISOMET 社の1206C-2-1002 を使用した. 4.1.4 光学キャビティ 図4-6 に高反射ミラー保持台の外観を示す.保持台は,イオンビームに長時間 さらされることにより熱を帯びる.熱膨張によるレーザーのアライメントのず れを防ぐため,素材として C/C コンポジットとカーボンを使用した.カーボン は熱伝導率が高く,また,C/C コンポジットは金属に比べ熱膨張率が小さい(8.0 ×10-7 /K).さらに,スパッタ粒子の付着によるミラーの反射率の低下を防ぐた め,ミラーの前にアイリスを設置した.
29 図4-6 高反射ミラー保持台 ファイバーから出るレーザーは広がり(NA=0.12)をもつため,ファイバー出口 にレンズを設置した.レンズとファイバー間の距離を調整することにより,キャ ビティ内での焦点を結ぶ位置の調節が可能である.安定したキャビティを形成 させるため,キャビティ長0.55 m の中間位置に焦点がくるようにビームプロフ ァイラを用いて調節した. 入射の逆側には,光電子増倍管へ導入するためのファイバーを設置している. 本研究では,浜松ホトニクス社の H10493-003 を使用した.周波数帯域は~8 MHz であり,時間分解能は10−7 s 以上となる.反射率 99.95%のミラーを使用 しているため,リングダウンタイムは3.66 × 10−6 s 以上なので時間分解能には 問題がないと言える.
4.2
参照スペクトル
波長の絶対値を求めるために参照スペクトルを測定する.そこで,ホローカソ ードランプ(HCL)を使ったオプトガルバノ分光法を採用した.図 4-7 にオプトガ ルバノ分光法の概略図を示す.レーザーがプラズマに入射すると,準位間で遷移 が生じ,準位密度が変化する.この密度変化は,プラズマのイオン化,再結合過 程等にも変化を与える.その結果,プラズマ中の荷電粒子数密度が変化し,イン ピーダンス変化が生じる.オプトガルバノ分光法は,インピーダンス変化を検出 する分光法であり,簡単な装置でスペクトルの取得が可能である(4-3,4).30 図4-7 オプトガルバノ分光法 プローブ光を1 kHz でチョッピングし,ロックインアンプを使い S/N 比を向 上させた.図4-8 に測定した参照スペクトルを示す. Al の吸収ラインは超微細 構造を持つため、3 つのガウシアンでフィッティングを行った(4-5). -6 -3 0 3 6 -0.5 0.0 0.5 1.0 1.5 2.0 2.5 3.0
OG 信号
multi Gauss
OG信号 [a.u.]
相対周波数 [GHz]
図4-8 参照スペクトル4.3 真空排気系
宇宙空間の真空環境や熱環境を模擬するために真空系を用いる。また,真空引31 きをすることによって放電管に生成するプラズマ気体の組成を一定に保つこと ができる.本研究に用いた真空容器を図4-9 に示す.直径 1.0 m,長さ 1.2 m の ステンレス製円筒容器で,電気的にアースされており基準電位を保っている.以 下に実験に用いた真空ポンプの特徴について述べる(4-6). 1) ロータリーポンプ(油回転真空ポンプ) ロータリーポンプは,回転する内部の板が気体をかき出すように排気す る真空ポンプの一種である.超高真空を必要とするチャンバの粗挽きや, 背圧を維持するための補助ポンプとして使われる.到達真空度は10−1 Pa(10−3 Torr)程度である. 2) メカニカルブースターポンプ メカニカルブースターポンプは,ケーシング内にある2 個のマユ型ロー タがその軸端の駆動ギアにより互いに反対方向に同期回転するように なっている.メカニカルブースターポンプは,粗引ポンプと組み合わせ て使用することにより粗引ポンプの排気速度の落ち込む領域を大幅に アップさせることができる.大気から排気するポンプではなく後段(大気 側)に油回転ポンプを設けて使用される.中・低真空領域(1 Pa~1000 Pa) でガス負荷の大きな雰囲気形成に主に使用される. 3) ターボ分子ポンプ ターボ分子ポンプは,固定された羽翼と回転する羽翼を交互に設けるこ とで,気体分子を一方向に移動させ高真空まで排気することができる真 空ポンプである.単独で大気を直接引くことができないので,油回転ポ ンプなどと併用し,10−1~10−6 Pa までの真空度に到達することができ る.
今回用いたポンプはEDWARDS 社製のロータリーポンプ EH250 (733 L/min,
到達圧力10−1 Pa,メカニカルブースターポンプ E2M40(設計排気速度 375
m3/h) ,三菱重工製のターボ分子ポンプ FT-2300W(1500 L/min)の 3 つのポン
32 図4-9 真空容器
4.4 イオンエンジン
図10 に本研究で使用し 30 W 級マイクロ波イオンエンジンの外観を,表 4-1 にグリッドパラメーターを示す.50×50 mm の箱型となっている.Al 製円筒 放電室の周囲に4×4×12 mm の長手方向磁化磁石を複数設置し,それらを軟鉄 製ヨークで挟み込んで放電室内に磁気回路を形成させている.放電室のサイズ は,直径φ21mm 高さ 12 mm である,磁石数を変更することで内部磁場を変更 することができる.磁石は永久磁石のサマリウムコバルト(Sm-Co)を使用してお り,この磁石は脆くて欠けやすいが,高い磁気特性を持ち,また,温度特性に優 れ,高温での使用にも比較的向いている.アンテナはSMA コネクタによって固 定されており,マイクロ波電力を放電室内部に伝えている.このアンテナには, モリブデン製の星型アンテナを使用している.過去の研究からこの形状のアン テナが最もカップリングが良いとわかっている(4-7). JIEDI コードでは,計算量を抑えるためグリッドのなかの一組の孔を含む六 角柱領域のみを対象としている.実験でこれとほぼ同等な状態を再現するため に 7 孔グリッドを使用した.中心孔の周りに 6 個の項を配置することにより, 中心孔は多孔グリッドの孔と同等な状態となると考えられる.33 図4-10 (左)30 W 級マイクロ波イオンエンジン,(右)グリッド詳細図 表4-1 グリッドパラメーター スクリーン アクセル 開口率[%] 66.6 24.0 孔直径[mm] 3 1.8 厚さ[mm] 1 孔の中心間距離[mm] 3.5 材料 Mo Al グリッド間距離[mm] 0.5 孔の数 7
4.5 位置調節装置
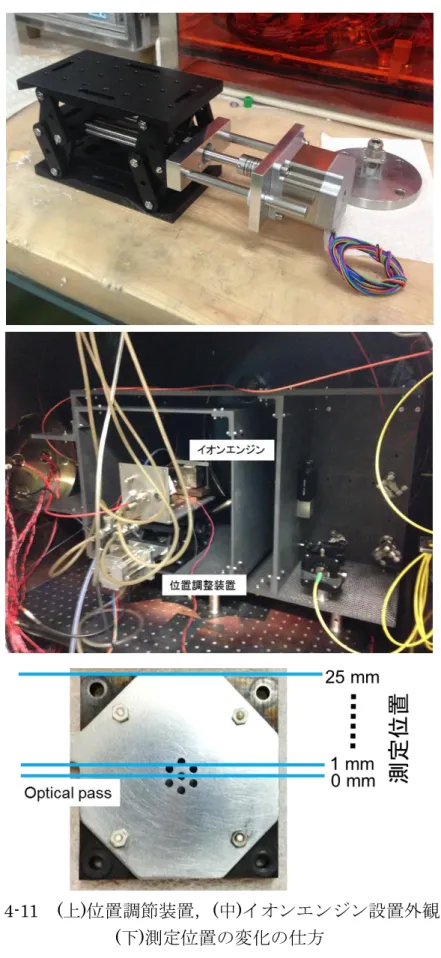
図4-11 に作成した位置調整装置とイオンエンジンを設置した際の外観を示す. 位置調節装置は,ジャッキと真空対応のモーター(オリエンタルモーター社製, PK566V-NA)を組み合わせて作成した.モーターの基本ステップ角は 0.72°, 停止角度誤差は5 min である.イオンエンジンの位置を下げることで,相対的 に光路の位置を上げていく.34
図4-11 (上)位置調節装置,(中)イオンエンジン設置外観,
35 参考文献
(4-1) http://htanaka.net/tanaka_hp/science/optics/aom.html
(4-2) Lei Tao : CONTINUOUS-WAVE CAVITY RING DOWN SPECTROSCOPY SENSOR FOR HALL THRUSTER EROSION MEASUREMENT”(2011)
(4-3) 宮崎健創:オプトガルバノ分光法(1984)
(4-4) 松田良信,天崎文晶,藤崎寛:二段階レーザー励起オプトガルバノ法 によるネオンホローカソード放電中の電界計測,長崎大学工学部研究 報告(1992)
(4-5) H. Scheibner, St. Franke, Samir Solyman, J.F.Behnke, C.Wilke and A. Dinklage :Laser absorption spectroscopy with a blue diode laser in an aluminum hollow cathode discharge” REVIEW OF SCIENTIFIC INSTRUMENTS, VOLUME 73, NUMBER 2, 24 October 2011, pp.378382
(4-6) 株式会社アルバック 編:新版 真空ハンドブック,株式会社オーム社 (2008)
(4-7) 笠岳幸,九州大学修士論文:マイクロ波放電型イオンエンジンのアン テナ設計最適化に向けた電磁波伝播解析
36
第
5章 実験方法・結果および考察
5.1 Hollow Cathode Lamp による Al 粒子計測
構築した損耗評価システムの妥当性を確認するために,ホローカソードラン プによる測定をイオンエンジンに先立って行った. 図5-1 にホローカソードランプを使った Al 粒子計測の実験装置を示す.本研 究室で所有している市販のホローカソードランプでは,陰極軸方向にレーザー 光の入射が不可能なため,軸方向に入射可能なHCL を製作した(図 5-1,右). 図5-1 ホローカソードランプ実験装置 (上)概略図,(左)外観,(右)放電電極系 放電管は管フランジにより構成され,アルゴンガスはマスフローコントロー
37 ラにより調整された後に放電管に導入され,放電電極系を通過した後,真空ポン プにより排気する.両端の窓の前からアルゴンガスを導入することで陰極材料 蒸気のレンズへの付着を防ぐ.放電電極系は,Al 円筒の内径 10 mm 外径 22mm の陽極と,内径8 mm 外径 14 mm の陰極で構成されている.電離効率が著しく 向上するホロー陰極効果を生じさせるため,陰極の内径を陰極シースの厚さの2 倍程度(5-1),陰極の長さを内径の3 倍以上(5-2)で製作した.なお電極間距離は,ガ ス種変更に対応するために,変更可能であるようにしている. 測定ターゲットとなるAl 粒子の発生原理を図 5-2 に示す.両極間に電圧を印 可し放電させることで,Ar ガスがイオン化する.イオン化した Ar は陰極に引 き寄せられ衝突し,陰極材料の蒸気が飛び出す.この時,発生した蒸気は基底状 態にあり,この蒸気を測定ターゲットとする. 図5-2 Al 粒子発生概要図 Al の 基 底 状 態 か ら の 吸 収 ラ イ ン は 394.512 nm(Vacuum) な の で , 394.508~394.516 nm の範囲でレーザーを発振し,電源電圧は 297 V, 外部回 路の抵抗は1 kΩ,投入最大レーザー強度はミラー手前で 62.5 μWであった.図 5-3 に放電電流変化に対する測定値を表し,3 つのガウシアンでフィッティング を行った.5 mA での最大吸収度はおよそ 100 ppm,7 mA で 300 ppm,10 mA では最も高い700 ppm を示した.実験条件から放電中のプラズマのインピーダ ンスを求めると,電流上昇に従って 58.4,41.4,28.7 Ωと減少しており,プラ ズマ密度が濃くなっていることがわかる.その結果,陰極へのイオン流束が増加 し,損耗量が増加したと考えられる. ホローカソードランプを使った実験により,構築したCRDS システムの有効 性を確認できたので,このシステムを用いてイオンエンジンを動作させた測定 を行う.
38 5 mA 7 mA 10 mA 図5-3 (左)放電の様子,(右)CRDS による実験結果 -2 0 2 4 6 8 10 12 14 0 200 400 600 800 1000 実験値 multi Gauss Abs (ppm) Relative frequency (GHz) -2 0 2 4 6 8 10 12 14 0 200 400 600 800 1000 実験値 multi Gauss Abs (ppm) Relative frequency (GHz) -2 0 2 4 6 8 10 12 14 0 200 400 600 800 1000 実験値 multi Gauss Abs (ppm) Relative frequency (GHz)
39
5.2 吸収の飽和
5.1 章に実験に加えて,放電電流 10 mA でのレーザー投入パワーと吸収スペ クトルの関係を計測した.計測結果を図5-4 に示す.図のプロットは,実験値を キャビティのFSR である 0.27 GHz ごとに平均し,標準偏差をエラーバーとし た. 図5-4 投入パワー依存性 測定結果から,投入最大パワーが1.5 μWで最小,62.5μWで最大となった.こ の結果は吸収の飽和に起因するものと考えられる. レーザー吸収分光法での吸収度は次式で表すことができる. α(𝜈) = ℎ𝜈𝐵12 𝑐 (𝑛1− 𝑔1 𝑔2𝑛2) 𝑔(𝜈) (5-1) ここで,ℎはプランク定数,𝑛1および𝑛2はそれぞれ下準位と上準位の密度,𝑔(𝜈) は吸収線のスペクトル分布を表す関数である.遷移確率が既知の吸収線では, 𝑛1 ≫ 𝑛2の条件においてレーザー光強度の変動を測定することで下準位密度𝑛1 を求めることができる.しかし,下準位の粒子が上準位へ過度に励起されると -2 0 2 4 6 8 10 12 0 200 400 600 800 1000 1200 1400 1600 1800 1.50 μ W 20.1 μ W 62.5 μ W Ab s (pp m) Relative frequency (GHz)40 𝑛1 ≫ 𝑛2の関係性が崩れる.この時,式(5-1)の𝑛1− 𝑔1 𝑔2𝑛2 が著しく減少することに より吸収係数が減少し,吸収が小さくなる.この現象を吸収の飽和と呼ぶ.吸収 の飽和は,スペクトルの中心へ向かうほど顕著に影響が表れるため,スペクトル の半値全幅が増加する.図5-4 の結果における半値全幅は,1.50 μWで 0.97 GHz, 20.1 μWで 1.08 GHz,62.5 μWで 1.32 GHz となった. CRDS 測定では,吸収の飽和に注意する必要がある.それは,測定に関与する キャビティ内のレーザー光強度がキャビティに入射する直前の数千倍にもなる ためである.例えば,本実験で使用する反射率99.95%のミラーではキャビティ 内のレーザー光強度は 2,000 倍になる.そこで,次式で表される飽和パラメー ターによって吸収の飽和の程度を評価する. 𝑆 = 𝐵21 𝑐 𝑆(𝑛𝑢)𝐼𝑛𝑢 1 𝐴12 (5-2) 𝐵21と𝐴12はアインシュタイン係数,𝑆(𝑛𝑢)は吸収スペクトルの半値全幅の逆数, 𝐼𝑛𝑢は単位面積当たりのレーザー光強度である.吸収の飽和を起こさないために は,𝑆 ≪ 1となるようにレーザー光強度を抑える必要がある.ホローカソードラ ンプを使った実験での飽和パラメーターは 1.50 μWで 1.0,20.1 μWで 12.0, 62.5 μWで 30.7 程度であり,値が 1 に近づくにつれ吸収の飽和の影響が少なく なっていくことが分かる. イオンエンジンを動作させた実験では入射させるレーザー光強度を充分に抑 えて実験を行う.
5.3 スパッタ粒子空間密度分布
CRDS では光路上の積分値しか求めることができないため,イオンエンジン の高さを調整できる装置を開発し,オニオンピーリングと組み合わせることで スパッタ粒子の空間分布を求めた. 5.3.1 オニオンピーリング(5-5) 積分値である線密度を,オニオンピーリングと呼ばれる手法を用いてグリッ ドの中心から半径方向への密度に変換することができる.オニオンピーリング を用いる際に,グリッドからのスパッタ粒子は方位対象と仮定した.図5-6 にオ ニオンピーリングの概念図を示す. それぞれの殻における密度𝑁(𝑟)は,次式で表す関係を持つ.41 ∑ 𝑘𝑖𝑗𝑁𝑗(𝑟) 𝑗 = (∫ 𝑁(𝑟)𝑑𝑥) 𝑖 (5-3) ここで,行列の要素であるk は殻内での任意位置𝑝𝑖での光路長であり,半径𝑟𝑗を 使って次式で表すことができる. 𝑘𝑖𝑗 = { 0, (𝑖 > 𝑗) 2√𝑟𝑗2− 𝑝𝑖2, (𝑖 = 𝑗) 2√𝑟𝑗2 − 𝑝𝑖2− 2√𝑟𝑗−12− 𝑝𝑖2, (𝑖 < 𝑗) (5-4) 以上から与えられる行列に対して、逆行列を掛け合わせることで半径方向の密 度を求めることができる. 図5-5 オニオンピーリング概念図 5.3.2 空間密度分布測定結果 スクリーングリッドに 500 V,アクセルグリッドに-100 V を印可し,推進剤 流量 19.5 μg/sにてイオンエンジンを動作した.測定位置を 1 mm 間隔で 16 mm まで変化させた.吸収スペクトルの全体を含む波長の掃引が困難だったため,ピ ーク位置と片方の端ができる限り見えるようにレーザーを発振した.測定中の 到達真空度は 6.36×10-4 Pa であった. 図 5-6 にキャビティの透過光強度の減衰の様子を示す.この減衰信号に指数関 数のフィッティングを行うことで,減衰時間を求めることができる.それぞれの 減衰信号から算出される吸収度をプロットしたのもが,図 5-7 の吸収スペクトル
42 となる.同時に測定した参照スペクトルのピーク位置を Al の吸収中心周波数と 同定し,相対周波数の零軸とした. 10 20 30 40 50 0.00 0.25 0.50 0.75 透過光 exponential fit
透過高強度 [a.u.]
時間 [
μ s]
図 5-6 減衰信号 -15 -10 -5 0 5 0 100 200 300 400 500 実験値 (1 mm) OG信号相対周波数 [GHz]
吸収度 [ppm]
0.0 2.5 5.0 7.5OG信号
[a.u]
図 5-7 1 mm 位置における吸収スペクトル43 測定位置 1,5,7,10,15 mm における算出した吸収スペクトルを図 5-8 に示 す.なお,比較がしやすいように 1 GHz 毎に平均しており,1 mm 位置のスペク トルのみにエラーバーをつけている.スペクトルから線密度を求める際にはス ペクトルエリアの積分値が必要になるので,吸収スペクトルの不足している部 分をフィッティングで補う.測定位置 0~4 mm の吸収スペクトルでは,吸収中心 周波数付近において吸収度の減少が見られた.この原因としては,スパッタ粒子 の放出角度によるドップラーシフトによるものだと考えられるが,今回の測定 では原因の解明は困難であった. 吸収スペクトルの広がりはドップラーシフトによって生じている.そのため, ガウシアンによるフィッティングは,アルミ原子が非平衡状態であるために物 理的には意味がないが,スペクトルと良い一致を示すので,スペクトルエリアの 積分値を求めるために2 つのガウシアンによるフィッティングを行った.また, Al の吸収ラインは超微細構造を持つため,複数のガウシアンでフィッティング を行う必要があるが,線幅20 GHz 以上と,超微細構造 1.5 GHz と比較して充 分大きいため,線密度算出に必要なスペクトルエリアを求める際には 1 つのガ ウシアン(分岐した 1 つの吸収スペクトルに対して)のフィッティングで充分で ある(5-3). -15 -10 -5 0 5 0 100 200 300 400 500 01 mm 05 mm 07 mm 10 mm 15 mm
吸収度 [ppm]
相対周波数 [GHz]
図5-8 吸収スペクトルの測定位置依存性44 それぞれの測定位置の吸収スペクトルから得られた線密度を図 5-9 に示し, 軸対称と仮定して半径方向の空間密度分布を算出したものを図5-10 に示す.図 5-9 より,4 mm を境に密度が単調に減少していることがわかる.この半径 4 mm の領域は,グリッドの孔が存在する領域と一致していることから,孔周辺におい て損耗が生じていることが確認できた. 空間密度分布を用いて,単位時間に測定光路と平行な面を横切るスパッタ粒 子の量,すなわち損耗量を求める.スパッタされたAl 粒子の速度は,CSU の A. Yalin らによるとトンプソン分布関数に従い,その平均値は 4900 m/s である (5-4).空間密度分布から得られた損耗量は1.51 ± 0.31 × 1015 atoms/s であった. JIEDI コードの数値解析結果では 6.1×1012 atoms/s となり,3 オーダー違いが 生じた.考えられる原因として,損耗量算出の際のスパッタ粒子の速度を,CSU のA. Yalin らによる実験から得られたトンプソン分布関数の平均速度を使用し ていることが挙げられる.より正確な比較を行うためには,LIF などによってグ リッドからのスパッタ粒子速度の計測を行う必要がある. 0 4 8 12 16 0.0 0.5 1.0 1.5 2.0 2.5 3.0
線密度 [10
13/m
2]
測定位置 [mm]
図5-9 測定位置に対する線密度変化45 0 4 8 12 16 0.0 0.5 1.0 1.5 2.0
密度 [10
15/m
3]
半径 [mm]
図5-10 半径方向に対するスパッタ粒子空間密度分布 さらに,図 8 に示した吸収スペクトルの横軸を速度に変換したものを図 5-11 に示す.変換には次式を使用した. 𝑉 =∆𝑓 𝑓0 𝑐 (5-5) ここで,∆𝑓は相対周波数,𝑓0は吸収中心周波数である.スペクトルの構造を把握 するために,図5-8 と同様にフィッティングを行い,全体を示している.なお, エラーバーに関しても同様に測定位置1 mm のみに付けている.図 5-11 より, 損耗量を求める際に仮定したスパッタ粒子の速度4900 m/s を超える粒子が存在 していることがわかる.ここで,図 5-12 にトンプソン分布関数の形状を示す. 今回過程した速度は,トンプソン分布の平均に当たる速度(平均速度)を使用して いる.そのため,実際には4900 m/s 以上の速度を持つ原子が存在し,速度の増 加に従い密度が減少していく.よって,図5-11 において 4900 m/s を超える粒 子が存在すること,速度が中心からずれるに従い吸収度が減少していくことが 理解できる.46 -75000 -5000 -2500 0 2500 5000 7500 50 100 150 200 250 300 350 1 mm 5 mm 7 mm 10 mm 15 mm
吸収度 [ppm]
速度 [m/s]
図5-11 吸収度の速度依存性 0 10000 20000 30000 40000 50000 0 2 4 6 8 10 12密度 [10
-13/m
-3]
速度 [m/s]
図5-12 トンプソン分布47
5.4 推進剤流量依存性
スクリーングリッドに 500 V アクセルグリッドに-100 V を印可し,推進剤で あるキセノンを19.5,29.3,39.1 μg/s と流量を変化させて測定した.推進剤流 量を変化させていったときの到達真空度はそれぞれ2.52,2.76,2.96 10-3 Pa で あった. 図5-11 に推進剤流量が 39.1 μg/s での実験結果を示す. 空間密度分布測定と 同様にガウシアンによるフィッティングを行った.図5-12 にはそれぞれの推進 剤流量での吸収スペクトルのフィッティング曲線を示す. 0 5 10 15 20 25 0 50 100 150 200 250 300 実験値 Gauss fit吸収度 [ppm]
相対周波数 [GHz]
図5-11 39.1 μg/s での吸収スペクトル48 0 5 10 15 20 25 0 50 100 150 200 250 300 19.5 μ g/s 29.3 μ g/s 39.1 μ g/s
吸収度 [ppm]
相対周波数 [GHz]
図5-12 推進剤流量対する吸収スペクトル変化 図5-10 の空間密度分布のグラフから損耗が起こっている領域を想定し,損耗 量を求めた.図5-13 に推進剤流量に対する損耗量変化を示す.実験の結果,推 進剤流量の増加に伴い 0.91,1.28,1.51×1015 atoms/s と損耗量が増加してい くことがわかった.損耗量増加の原因として,電荷交換イオンの増加が考えられ る.イオンビーム電流Ibは 2 mA であったので,推進剤利用効率を次式から求 める. 𝜂𝑈 = 𝐼𝑏𝑀 𝑒𝑚̇ (5-6) ここで,M は推進剤粒子1個の質量,e は電気素量,𝑚̇は推進剤流量を示す.上 式より,推進剤流量が増加すると,13.96,9.29,6.96%と推進剤利用効率が低下 していくことがわかる.このことは,放電室内で電離せずにグリッドを通り抜け ていく中性粒子の割合が増加していること意味している.結果,電荷交換衝突に よって生じる電荷交換イオンの増加により,アクセルグリッドへのイオン流束 が増加したと考えられる.49 20 25 30 35 40 0.8 1.0 1.2 1.4 1.6 1.8
推進剤流量 [
μ g/s]
損耗量 [10
15atoms
/s]
図5-13 推進剤流量に対する損耗量変化50 参考文献
(5-1) 真瀬寛:直流放電によるプラズマ生成
(5-2) 山崎勉:マイクロホロー陰極放電の電圧電流特性
(5-3) H. Scheibner, St. Franke, Samir Solyman, J.F.Behnke, C.Wilke and A. Dinklage :Laser absorption spectroscopy with a blue diode laser in an aluminum hollow cathode discharge” REVIEW OF SCIENTIFIC INSTRUMENTS, VOLUME 73, NUMBER 2, 24 October 2011, pp.378382
(5-4) Azer P. Yalin, Vijaya Surla:Determination of Number Density and Velocity of Sputtered Particles by Cavity Ring-Down Spectroscopy”IEPC-2005-300
(5-5) Brain C. Lee and Azer P. Yalin, Alec Gallimore, Wensheng Huang and Hamhawi:Real-Time Boron Nitride Erosion Measurements of the HiVHAc Thruster via Cavity Ring-Down Spectroscopy, IEPC-2013-199
51
第
6章 結論
本研究では,イオンエンジンのグリッド損耗状況をモニタリングできるシス テムを開発した.
1) Cavity Ring-Down Spectroscopy を用いた損耗評価システムの開発
本研究室で開発した30 W 級マイクロ波イオンエンジンを実動作させた 計測により,世界で初めてCRDS によってイオンエンジンのグリッド損耗 の計測に成功した. 2) スパッタ粒子の空間密度分布計測 ジャッキとモーターを組み合わせた位置調節装置とオニオンピーリング とを組み合わせることで,グリッド損耗の空間密度分布の計測に成功した. 計測によって得られた損耗量は1.51 ± 0.21 × 1015 atoms/s であった. 3) グリッド損耗の推進剤流量依存性 推進剤流量の増加に従い,損耗量が増加していくことを確認した.原因 として,推進剤利用効率の低下によって放電室内で電離せずにグリッドを 通り抜けていく中性粒子が増加し,損耗の主な要因である電荷交換イオン が増加したと考えられる.
52