平成24年度 修 士 論 文
インターリーブ ADC のディジタル補正技術の研究
指導教員 小林 春夫 教授
群馬大学大学院工学研究科
電気電子工学専攻
易 茹
概要
本論文では、インターリーブADC のタイミングスキューを検出し影響を低 減するディジタル手法を提案する。インターリーブADC は、複数個のサンプ リング・ホールド回路とADC を従属接続し並列に並べ、各チャネルに与える サンプリングクロックの位相をずらすことにより、等価的にサンプリングレー トを実現するADC 構成方式である。インターリーブ ADC システムは高速サ ンプリングを実現する効果的な方法だが、入力信号が高周波化するにつれチャ ンネル間のサンプリングタイミングスキューの影響か顕在化する。 インターリーブADC のタイミングスキューの自己校正法はスキュー検出と スキュー補正の二つのステップがある。従来のタイミングスキューの校正法で は、アナログ方式とディジタル方式両方を使用し、自己校正を行う。デメリッ トとして、比較的にコストが高く、スピートが遅いことが挙げられる。本論文 検出、補正両方ディジタル方式で行う自己校正法を提案した。各チャンネル ADC 出力間の相互相関を算出、比較することでタイミングスキューを検出し、 線形位相遅延ディジタルフィルタを用いてタイミングスキューの影響の補正 を行う。また、MATLAB シミュレーションで有効性を検証した。目次
第1 章 研究背景・研究目的 ... 1 1.1 研究背景 ... 1 1.2 研究目的 ... 2 第2 章 インターリーブ ADC ... 3 2.1 インターリーブ ADC の原理 ... 3 2.2 インターリーブ ADC のタイミングスキュー ... 7 第3 章 タイミングスキュー影響低減の提案手法 ... 11 3.1 提案手法の原理 ... 11 3.2 相互相関(スキュー検出) ... 12 3.3 線形位相遅延ディジタルフィルタ (スキュー補正) ... 16 第4 章 シミュレーション ... 20 4.1 入力信号についての考察 ... 20 4.2 シミュレーションの結果 ... 22 第5 章 4 チャネルインターリーブ ADC への拡張 ... 27 5.1 拡張方式(1) ... 27 5.2 拡張方式(2) ... 29 第6 章 まとめ ... 31 参考文献 ... 32 謝辞 ... 34 本論文の功績 ... 35図の目次
図 2-1 一般的な M チャネル時間インターリーブ ADC ... 3 図 2-2 各サンプリングクロックのスペクトラム ... 4 図 2-3 周波数スペクトラムのふるまい... 5 図 2-4 タイミングスキューによるインターリーブ ADC 出力誤差 ... 7 図 2-5 入力周波数と出力エラーとの関係 ... 8 図 3-1 提案手法のブロック図 ... 11 図 3-2 理想の 2 チャネルのクロック ... 13 図 3-3 スキューのない 2ch インターリーブ ADC の 2 つのチャネル ADC 出力間の相互相関。(対称になる) ... 13 図 3-4 実際の 2 チャネルのクロック ... 14 図 3-5 スキューのある 2ch インターリーブ ADC の 2 つのチャネル ADC 出力間の相互相関。(対称でない) ... 14 図 3-6 任意微小時間分解能τで遅延させられる ... 16 図 3-7 理想アナログフィルタの周波数応答(a)インパルス応答(b) ... 17 図 3-8 (a)位相が回転した理想アナログフィルタ周波数応答 ... 18 図 3-9 線形位相遅延ディジタルフィルタの設計 ... 19 図 4-1 タイミングスキューとチャネル間の相互相関値の差との関係 . 21 図 4-2 タイミングスキューと入力周波数との関係 ... 21 図 4-3 シミュレーション条件 1 の結果 ... 23 図 4-4 シミュレーション条件 2 の結果 ... 24 図 4-5 出力信号のパワースペクトル ... 25 図 4-6 タイミングスキューのスプリアス低減効果の確認 ... 26 図 5-1 CH1 と CH3 とのチャネル間の相互相関 ... 28 図 5-2 CH2 と CH4 とのチャネル間の相互相関 ... 28 図 5-3 CH1 と CH3 の組、CH2 と CH4 の組間の相互相関 ... 28 図 5-4 CH1 と CH3 とのチャネル間の相互相関 ... 29図 5-5 CH1 と CH2 間、CH3 と CH2 間の相互相関... 30 図 5-6 CH1 と CH4 間、CH3 と CH4 間の相互相関... 30
1
第1章 研究背景・研究目的
1.1 研究背景
電子デバイスは絶え間無く高速化し、それに応じてディジタルオシロスコー プや LSI テスター(半導体試験装置)などの電子計測器への性能要求が増大 している。そこではますます高速サンプリングで動作するアナログ/ディジタ ル変換器(ADC)が要求され(1, 2)、近年インターリーブADC が特に注目され ている。 インターリーブADC とは、M 個のサンプリング・ホールド回路と ADC を 従属接続し並列に並べ、各チャネルに与えるサンプリングクロックの位相を等 間隔にずらすことにより順次動作し、等価的に M 倍のサンプリングレートを 実現するADC 構成方式である。インターリーブ ADC システムは高速サンプ リングを実現する効果的な方法であるが、入力信号が高周波化するにつれチャ ネル間のサンプリングタイミングスキューの影響か顕在化する(1-7)。このタイ ミングミスマッチによるサンプリングクロックの位相誤差の発生により不要 なスプリアスが発生し、性能が劣化するという問題点がある。従来のタイミン グスキューの校正法では、アナログ方式とディジタル方式両方を使用し、自己 校正を行う。デメリットとして、比較的にコストが高く、スピートが遅いこと が挙げられる。2
1.2 研究目的
本研究では、アナログ回路を不使用、全ディジタル方式で自己校正を行う方 法を提案した。各チャンネルADC 出力間の相互相関を算出、比較することで スキューを検出し、線形位相遅延ディジタルフィルタを用いてタイミングスキ ューの影響の補正を行う。高速、高精度、安定性かつ信頼性が高い校正法を研 究目的とする。3
第2章 インターリーブ ADC
2.1 インターリーブ ADC の原理
高速な波形ディジタイザを実現する技術のひとつとして、時間インターリー ブADC と呼ばれる ADC 構成方式がある。時間インターリーブ ADC は、複 数個のサンプリング・ホールド回路とADC を従属接続し並列に並べ、各チャ ネルに与えるサンプリングクロックの位相をずらすことにより、等価的にサン プリングレートを実現するADC 構成方式である。図 2-1 に一般的な M チャ ネルでの時間インターリーブADC を示す。 図 2-1 一般的な M チャネル時間インターリーブ ADC チャネル 1 のクロック CLK1 を基準とし、各チャネルのクロックは Ts を 周期とする。M チャネルの場合では、時間インターリーブ ADC 全体のクロ ックは個々のADC の 1/M 倍となる。すなわち、各チャネルのサンプリング レートであるfs = 1/Ts は、個々の ADC の M 倍のサンプリングレートである
4
f’s = M・fs を実現していることが確認できる。 この場合、m 番目のサンプリングクロックは、
0,1,, 1
M m T m k M t t p k s m (2.1) のように表すことができる。これをフーリエ変換すると、
0,1, , 1
1 1 / 2 2
M m e T M k f T M T M k f T M e t p M km j k s s k s s mT f j m s (2.2) となる。式2.2 から、m 番目の ADC へ印加するサンプリングクロックの位相 は、1/(M・Ts)毎に2km/Mずつ回転することが分かる。 図 2-2 各サンプリングクロックのスペクトラム 図 2-2 に M=4 の場合の 0 番目のサンプリングクロックを基準とした場合の各5
サンプリングクロックのスペクトラムを示す。時間インターリーブADC では、 このようなサンプリングクロックによってAD 変換を行う。 入力信号の周波数スペクトラムX(f)を m 番目の ADC によりサンプリングす ると、その周波数スペクトラムは、
0,1, , 1
1 1 ~ / 2 / 2
M m e T M k f X T M e T M k f T M f X t X M km j k s s M km j k s s m m (2.3) と表せる。 図 2-3 周波数スペクトラムのふるまい 図 2-3 に、4 チャネルの場合の周波数スペクトラムのふるまいを示す。図 2-3 に示したクロックのスペクトラムに対して、入力信号のスペクトラムX(f)の畳6
み込みが行われている。時間インターリーブが成功すると、図 2-3 の一番下 の図のように、信号成分のサンプリングによるイメージ成分は、インターリー ブ後のサンプリングレートである 1/Ts 上にのみ発生し、その他の成分は相殺 されることがわかる。 一般にM チャネルの場合、式 2.3 より、
k s s M m T k f X T f X f X~ ~ 1 1 (2.4) と表すことができる。この式は、サンプリングによるX(f)のレプリカは、1/Ts の整数倍にのみ存在することを示し、言い換えると 1/Ts のサンプリングレー トでサンプリングされたことを意味する。7
2.2 インターリーブ ADC のタイミングスキュー
前述のように、時間インターリーブが成功すれば、低レートのM 個の ADC を使用することにより、分解能を維持したままサンプリングレートを M 倍に 上げることが可能である。しかし、実際には各ADC へ供給するサンプリング クロックの位相を正確に制御することは難しい。また、各チャネルの周波数特 性が正確に同一であるとは考えにくい。このようなチャネル間のミスマッチが 不要なスプリアスを発生させ、その結果ダイナミックレンジを低下させてしま うことになり、出力誤差が生じる(図 2-4 に参照)。この誤差は同じスキュー でも入力信号スルーレートが大きい(高周波信号、大振幅信号)ほど大きくな る(図 2-5 に参照)。 図 2-4 タイミングスキューによるインターリーブ ADC 出力誤差 -1 0 1 2 3 4 5 6 7 -1.5 -1 -0.5 0 0.5 1 1.5dt
dt
タイミングスキュー
タイミングスキューの影響で出力エラー
理想のクロック
実際のクロック
理想のサンプリング点
実際のサンプリング点
8
図 2-5 入力周波数と出力エラーとの関係 最も単純な2 チャネルの時間インターリーブ ADC でタイミングスキューの 影響を説明する。 チャネル1 の ADC のスペクトラムは式 2.5 で表される。
k s s ideal T k f X T f X 2 2 1 1 (2.5) 式2.5 は、入力されたアナログ信号がサンプリングされることにより発生す るスペクトラムのレプリカが1/(2Ts) 毎に発生することを示している。 また、チャネル2 の ADC のスペクトラムは式 2.6 で表される。
j k k s s ideal e T k f X T f X
2 2 1 2 (2.6) 基準となるチャネル1 のクロックに対してチャネル 2 のクロックが半クロ ック遅延しているため、位相が 180 度回転するので発生するスペクトラムの レプリカが1/(2Ts) 毎に反転して発生する。9
インターリーブされた結果は式2.5 と式 2.6 の加算で表されるので、
k k j s s ideal ideal ideal e T k f X T f X f X f X 1 2 2 1 2 1 2 , 1 (2.7) ここで、 odd k even k e j k : , 0 : , 2 1 (2.8) であるから、式2.7 は
k s s ideal T k f X T f X 1,2 1 (2.9) となる。式 2.9 は、サンプリングにより発生するスペクトラムのレプリカが 1/Ts 毎に発生することを示し、インターリーブされたことによりサンプリン グレートが2 倍になった。言い換えると、チャネル 1 の ADC のスペクトラ ムのレプリカに対して、位相が180 度回転しているチャネル 2 の ADC のスペ クトラムのレプリカが、完全に互いを打ち消し合っているということである。 次に、チャネル2 の ADC のクロックにタイミングスキューが生じたと仮定 するとスペクトラムは式2.10 で表される。
j f k T jk k s s delay e e T k f X T f X x
/(2 ) 2 2 2 1 (2.10) 同じくインターリーブされた結果は式2.5 と式 2.10 の加算で表されるので、
j f k T jk
k s s ideal e e T k f X T f X x
/(2 ) 2 , 1 1 1 (2.11) 式 2.11 は条件式 2.8 より、k の値が奇数であったとしても式 2.9 にはなら ない。これが周波数領域でのタイミングスキューの影響であり、インターリー ブADC 特有のスプリアスとなる。これはチャネル 2 の ADC に与えられるク ロックの位相が完全に180 度回転していないため、基準としているチャネル 1 のADC のスペクトラムのレプリカを、完全に互いを打ち消し合っていないか10
11
第3章 タイミングスキュー影響低減の提案手法
3.1 提案手法の原理
提案するタイミングスキューの影響手法の構成を図 3-1 に示す。ここでは 2 チャネルインターリーブADC を例として、本提案手法の原理を説明する。 図 3-1 提案手法のブロック図 2つのチャネルADC 出力に、それぞれに遅延分を±4τ、±2τ、±τに設 定した遅延ディジタルフィルタ(5-8)を接続する。このτは任意に小さい値に 設定できる。 その2つのディジタルフィルタの出力信号間のチャネル相互相関を算出す る。算出した相関関数のラグ0 点とラグ 1 点の値を比較により、CLK1 の 180 度位相から CLK2 が正側にずれているか負側にずれているかを判断できる。 その情報に基づいて、コントローラは初段のMUX 選択線を制御し「チャネル 1 を 4τ遅延、チャネル 2 を-4τ」か「チャネル 1 を-4τ、チャネル 2 を 4τ」 かを制御する。 この状態で再び相互相関を計算し、その値をもとに2 段目の MUX 選択線を 制御し「チャネル1 を 2τ遅延、チャネル 2 を-2τ」か「チャネル 1 を-2τ、 チャネル2 を 2τ」かを制御する。3段目の MUX の選択も同様に繰り返す。4τ
ADC2 ADC1コントローラ
2τ
τ
-4τ
-2τ
-τ
V
in相関を算出
D
1D
2CLK1
CLK2
12
⋆ ⋆ 上記は3 ステップの場合を説明したが、一般には N ステップの逐次比較(2 進探索)で各チャネルの出力経路を決めるように設計可能である。タイミング スキューは±τ以内にディジタル的に補正できる。 以下、タイミングスキューの検出技術と補正技術について詳しく説明する。3.2 相互相関(スキュー検出)
信号処理において、相互相関は二つの時系列信号の類似度を示し、次のよう に定義される。 連続時間信号の場合
f g t d t g f )( ) ( ) ( ) ( * 離散時間信号の場合
m m n g m f n g f )( ) [ ] [ ] ( * ただし、 * f は f の複素共役である。 一般的に、相関関数は関数を正しく推定するために正規化を必要とする。 理想インターリーブADC ではタイミングスキューがなく、チャネル 1 とチ ャネル2 のクロックは 1/2 の周期 Ts/2 だけずれている。相互相関は二つの信 号の類似度を表すものなので、図 3-2 のような理想のサンプリング点 a’と b’ では、チャネル 1 を基準として算出したラグ 0 点とラグ 1 点の相互相関値は 等しい。正弦波入力に対するチャネル間の相互相関の計算値を図 3-3 に示す。13
図 3-2 理想の 2 チャネルのクロック 図 3-3 スキューのない 2ch インターリーブ ADC の 2 つのチャネル ADC 出力間の相互相関。(対称になる)-3 -2 -1
0
1
2
3
4
0
0.2
0.4
0.6
0.8
1
Lag
S
imi
lar
ity
14
図 3-4 実際の 2 チャネルのクロック 図 3-5 スキューのある 2ch インターリーブ ADC の 2 つのチャネル ADC 出力間の相互相関。(対称でない)-3 -2 -1
0
1
2
3
4
0
0.2
0.4
0.6
0.8
1
Lag
S
imi
lar
ity
15
実際のインターリーブ ADC ではチャネル間のタイミングスキューΔt をゼ ロにはできないため、a 点と b 点では基準としたチャネル 1 のサンプリング点 とのずれはそれぞれTs/2-Δt、Ts/2+Δt となる(図 3.4 に参照)。算出した相 関関数は図 3.5 のようにラグ 0 点とラグ 1 点の相関に差が生じる。 また、タイミングスキューの正負がその差の正負を決めるので、相関のラグ 0 点とラグ 1 点間の相関値の差からタイミングスキューの正負を推定できる。 表 4.1 表 3.1 にラグ 0 点とラグ 1 点の相関値 R(0)、R(1)とスキューΔt の 関係に示す。 ここで注意しなければいけないこととして、チャネル間の相互相関値は正規 化した類似度なので、タイミングスキューが-Ts/2 のとき、最も類似で 1 とな り、タイミングスキューがTs/2 のとき 0 となる。また、計算した相関値から タイミングスキューの逆算は理論上にできない。 表 3.1 ラグ 0 点とラグ 1 点の相関値 R(0)、R(1)とスキューΔt の関係 R(0)<R(1) Δt>0 R(0)=R(1) Δt=0 R(0)>R(1) Δt<016
3.3 線形位相遅延ディジタルフィルタ (スキュー補正)
微小な時間分解能τでチャネルADC 出力値を線形位相を保持したままで遅 延させるため、線形位相遅延ディジタルフィルタを用いる(5-8)。 線形位相特性は、時間領域で信号波形を維持するために重要である。偶数ま たは奇数対称の係数を持つ FIR フィルタは、一般的に線形位相特性かつ安定 であることが知られている。分母と分子の両方で偶数または奇数対称の係数を 持つIIR フィルタは、直線的な特性も有するが、不安定である。その為、線形 位相特性が要求される場合は、FIR フィルタが好まれるが、群遅延の時間分解 能が Ts/2 に制限されるためにタイミングスキュー調整に適用することができ なかった。 これに対し線形位相遅延ディジタルフィルタ(5-8)は任意微小時間分解能τ (図 3-6 参照)で遅延させることができる。その構成を説明する。 図 3-6 任意微小時間分解能τで遅延させられる 次のような理想的なアナログフィルタの周波数応答を図 3.7(a)に示す。
s s in out T T t V a t V / , 0 / , 0 このアナログ理想フィルタのインパルス応答は17
図 3-7(b) にアナログ理想フィルタのインパルス応答を示す。 (a) (b) 図 3-7 理想アナログフィルタの周波数応答(a)インパルス応答(b) そこで図 3-7 (b)を時間τ分シフトする。得られたインパルス応答をまたフ ーリエ変換し、周波数応答を求めると図 3-8 のようになる。インパルス応答 をτ分シフトした場合、、周波数応答の振幅特性は変化せず、位相特性が jw e 分傾く。これはフーリエ変換の時間推移の性質からも説明できる。図 3-8(b) を遅延理想フィルタを呼ぶことにする。
s T t sinc a t h 0 18
(a) (b) 図 3-8 (a)位相が回転した理想アナログフィルタ周波数応答 (b)対応する sinc 関数が時間シフトしたインパルス応答 ア ナ ロ グ 理 想 フ ィ ル タ の 場 合 、 イ ン パ ル ス 応 答 が 有 限 個 と な る た め FIR(Finite Impulse Response)特性を示す。しかし時間シフトした後は、イン パルス応答が現れていなかった整数値の部分にもインパルス応答が見えてく る。すなわち、全ての整数値の部分で値を持つことになり、インパルス応答が 無限に続くIIR(Infinite Impulse Response)特性を示す。完全線形位相特性と 安定性の特徴を持つ FIR ディジタルフィルタとして利用したいので、窓関数 法を用いてフィルタ係数を有限長に近似する。窓関数を遅延させたディジタル フィルタに掛けて、フィルタ係数を打ち切りIIR 特性の係数を FIR 特性に戻 して線形位相遅延ディジタルフィルタは設計される。 実際の設計では、補正特性を持たせたいディジタルフィルタに対して、遅延 理想フィルタを畳み込むことでタイミングスキュー補正用ディジタルフィル タを設計する。予め補正したいタイミングスキューを測定しておき、従来の FIR ディジタルフィルタのインパルス応答を、スキュー分遅延させることで補 正特性を持たせる。また、窓関数を掛けて有限項で打ち切りIIR 特性から再び FIR 特性に戻す。
19
図 3-9 線形位相遅延ディジタルフィルタの設計 ここでは簡単のため遅延分±4τ、±2τ、±τを設定した遅延ディジタル フィルタ 3 ステップで設置し、14τ分のタイミングスキューを補正できるよ うにして、シミュレーションを行った。 以上二つの技術を使って、インターリーブADC でのタイミングスキュー のディジタル手法による検出・補正を行う。20
第4章 シミュレーション
4.1 入力信号についての考察
ディジタル自己校正回路は主にフォアグラウンド自己校正法とバックグラ ウンド自己校正法に分類される。 フォアグランド自己校正:インターリーブADC の通常の動作を止め、自己 校正モードをもつ。 バックグランド自己校正:インターリーブADC の通常の動作を止めずに(入 力にはどのような信号が入ってくるか未知の場合もあるが)自己校正を行う。 バックグランド自己校正では、通常動作を止めない点は好ましいが、収束性 は入力信号に依存してしまう。 本研究では、フォアグランド自己校正に焦点を当て、シミュレーションを 行った。 このとき、入力信号が正弦波の場合は、タイミングスキューに対する相互相 関値の非対称性の感度がよくない。複数正弦波の合成信号(マルチトーン信号) の場合のほうが感度がよい。この際は位相のランダム性やクレストファクタの 最小化(9-11)を考慮する必要がある(9-11)。 図 4-1 に、入力信号が正弦波の場合と 3 トーン信号の場合、それぞれタ イミングスキューの大きさとチャネル間のラグ 0 とラグ 1 との相互相関値の 差の関係を示している。タイミングスキューがないとき、相互相関値の差が共 に0 だが、タイミングスキューの増大につれ、相互相関値の差が大きくなる。 タイミングスキューがチャネル周期の 10%に大きくするとき、ランダム性の 高い 3 トーン信号の場合の相互相関値の差が正弦波の場合の 4 倍近くに達し た。 また、入力信号の周波数とチャネル間の相互相関値の差の関係について、 シミュレーションを行った。図 4-2 のように、入力信号の周波数の増大につ れ、チャネル間の相互相関値の差が大きくなる傾向が見える。21
図 4-1 タイミングスキューとチャネル間の相互相関値の差との関係 図 4-2 タイミングスキューと入力周波数との関係-0.1
-0.05
0
0.05
0.1
-0.1
-0.05
0
0.05
0.1
Timing Skew
S
imi
lar
ity D
iffe
r
e
n
c
e
0.031
0.06
0.005
0.01
0.015
0.02
0.025
S
imi
lar
ity D
iffe
r
e
n
c
e
Frequency(kHz)
22
4.2 シミュレーションの結果
提案のディジタル補正技術の有効性を確認するためにタイミングスキュー を含む2 チャネル時間インターリーブ ADC を想定して検証を行った。タイミ ングスキュー補正用ディジタルフィルタを設計した。タイミングスキューをサ ンプリング周期Ts の+2%とし、入力信号は 3 トーン信号を使用した。また、 線形位相遅延ディジタルフィルタのパラメータとして、ブラックマン窓関数を かけて21 タップのディジタルにした。群遅延τを 0. 1%Ts に設定した。シミ ュレーション条件を表 4.1 に示す。 表 4.1 シミュレーション条件 1 タイミングスキュー + 0.02 Ts フィルタのタグ数 21 窓関数 Blackman τ 0.001 Ts23
補正前 (step 1) 4τで補正 (step 2) 2τで補正 (step 3) τで補正 図 4-3 シミュレーション条件 1 の結果 また、対照としてタイミングスキューをサンプリング周期 Ts の 1%を設定 した2 チャネル時間インターリーブ ADC でシミュレーションを行った。シミ ュレーション条件を表 4.2 に示す。 -1 0 1 2 0.55 0.6 0.65 0.7 0.75 Lag S imi lar ity -1 0 1 2 0.55 0.6 0.65 0.7 0.75 Lag S imi lar ity -1 0 1 2 0.55 0.6 0.65 0.7 0.75 Lag S imi lar ity -1 0 1 2 0.55 0.6 0.65 0.7 0.75 Lag S imi lar ity24
補正前 (step 1) 4τで補正 (step 2) 2τで補正 (step 3) τで補正 図 4-4 シミュレーション条件 2 の結果 -1 0 1 2 0.55 0.6 0.65 0.7 0.75 Lag S imi lar ity -1 0 1 2 0.55 0.6 0.65 0.7 0.75 Lag S imi lar ity -1 0 1 2 0.55 0.6 0.65 0.7 0.75 Lag S imi lar ity -1 0 1 2 0.55 0.6 0.65 0.7 0.75 Lag S imi lar ity 表 4.2 シミュレーション条件 2 タイミングスキュー -0.01Ts フィルタのタグ数 21 窓関数 Blackman τ 0.001 Ts25
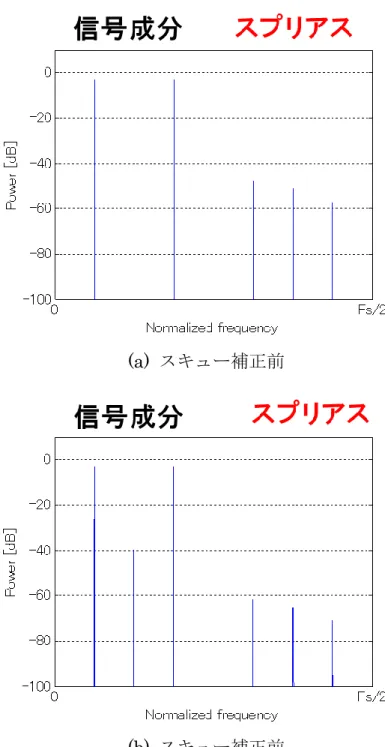
シミュレーション結果から、本研究が提案する手法の有効性を確認した。 図 4-5 からタイミングスキューの影響により、不要なスプリアスが観測さ れ、信号帯域内へも影響してきていることがわかる。本提案手法を適用すると、 図 4-6 のように、スプリアスが補正できていることが分かる。 (a)スキューなしのインターリーブ ADC の出力 (b)スキュー影響をうけたインターリーブ ADC の出力 図 4-5 出力信号のパワースペクトル26
(a) スキュー補正前
(b) スキュー補正前
27
第5章 4 チャネルインターリーブ ADC への拡張
最も単純な2 チャネルインターリーブ ADC で提案手法の有効性を確認した。 本章では提案手法を4 チャネルインターリーブ ADC に応用するため、2 つの 拡張方式を提案し、シミュレーションを行った。5.1 拡張方式(1)
拡張方式(1)は以下のように補正する。 1、2 チャネルインターリーブ ADC 補正用の提案方式で CH1 と CH3 との タイミングスキューの校正を行う。同時に CH2 と CH4 とのタイミングスキ ューの校正を行う。CH1 と CH3 間のクロック、CH2 と CH4 間のクロックを それぞれ1/2 周期に調整する。 2、CH1 を基準として CH2 との相関、また CH3 を基準として CH2 との相 関のラグ0 点の相関値を算出、比較し、同じように逐次比較方式で CH1、CH3 の組とCH2、CH4 の組と同時に線形位相遅延ディジタルフィルタを用いてタ イミングスキューの補正を行う。 この方式でMATLAB シミュレーションを行った。インターリーブ ADC の CH2、CH3、CH4 のタイミングスキューをそれぞれ- 0.01 周期、0.01 周期、 -0.02 周期に設定した。また、線形位相遅延ディジタルフィルタのパラメータ として、ブラックマン窓関数をかけて21 タップのディジタルにした。群遅延 τを0.001 周期に設定した。 シミュレーションの結果は以下のように示す。シミュレーション結果から、 拡張方式(1)の基本動作を確認した。28
補正前 補正後 図 5-1 CH1 と CH3 とのチャネル間の相互相関 補正前 補正後 図 5-2 CH2 と CH4 とのチャネル間の相互相関 補正前 補正後 図 5-3 CH1 と CH3 の組、CH2 と CH4 の組間の相互相関 -2 -1 0 1 2 3 0.5 0.6 0.7 0.8 0.9 Lag S imi lar ity -2 -1 0 1 2 3 0.5 0.6 0.7 0.8 Lag S imi lar ity -2 -1 0 1 2 3 0.5 0.6 0.7 0.8 0.9 Lag S imi lar ity -2 -1 0 1 2 3 0.5 0.6 0.7 0.8 Lag S imi lar ity -1 0 1 0.9 0.905 0.91 0.915 0.92 0.925 Lag S imi lar ity -1 0 1 0.9 0.905 0.91 0.915 0.92 0.925 Lag S imi lar ity29
5.2 拡張方式(2)
拡張方式(2)は以下のように補正する。 1、CH1 と CH3 とのタイミングスキューの校正を行う。今まで相互相関を 計算する 2 チャネルを両方線形位相遅延ディジタルフィルタで補正を行った が、この方式ではCH1 の出力をそのままにして、CH3 の片方だけ補正を行う。 2、CH1 を基準として CH2 との相関、また CH3 を基準として CH2 との相 関のラグ 0 点の相関値を算出、比較し、CH2 のタイミングスキューの補正を 行う。同時にCH1 を基準として CH4 との相関のラグ 0 点の相関値と、また CH3 を基準として CH4 との相関のラグ 1 点の相関値を算出、比較し、CH4 のタイミングスキューの補正を行う。 拡張方式(1)と同じのようなパラメータを使用し、シミュレーションを行 った。結果は以下のようになる。シミュレーション結果から、拡張方式(2) の基本動作を確認した。 補正前 補正後 図 5-4 CH1 と CH3 とのチャネル間の相互相関 -2 -1 0 1 2 3 0.5 0.6 0.7 0.8 0.9 Lag S imi lar ity -2 -1 0 1 2 3 0.5 0.6 0.7 0.8 Lag S imi lar ity30
補正前 補正後 図 5-5 CH1 と CH2 間、CH3 と CH2 間の相互相関 補正前 補正後 図 5-6 CH1 と CH4 間、CH3 と CH4 間の相互相関 二つの拡張方式の基本動作を全て確認したが、方式(1)と比べて方式(2) のほうではさらに多チャネルの拡張が容易であることを分かった。また、二つ の拡張方式の有効性、及び出力特性の変化についてまだ確認する必要がある。 -1 0 1 0.9 0.905 0.91 0.915 0.92 0.925 Lag S imi lar ity -1 0 1 0.9 0.905 0.91 0.915 0.92 0.925 Lag S imi lar ity -2 -1 0 1 2 0.9 0.905 0.91 0.915 0.92 0.925 Lag S imi lar ity -2 -1 0 1 2 0.9 0.905 0.91 0.915 0.92 0.925 Lag S imi lar ity31
第6章 まとめ
本研究では、インターリーブADC のタイミングスキューを検出し影響を低 減するディジタル自己校正法を提案した。各チャンネルADC 出力間の相互相 関を算出、比較することでタイミングスキューを検出し、線形位相遅延ディジ タルフィルタを用いてタイミングスキューの影響の補正を行う。 MATLAB シミュレーションで提案手法の基本動作と有効性を確認した。 また、4 チャネルインターリーブ ADC への拡張について検討し、2 つの拡 張方式を提案した。2 つの拡張方式を MATLAB シミュレーションし、基本動 作を確認した。32
参考文献
(1) N. Kurosawa, H. Kobayashi, K. Maruyama, H. Sugawara, and K. Kobayashi, “Explicit Analysis of Channel Mismatch Effects in Time-Interleaved ADC System,” IEEE Trans. on Circuits and Systems I: Fundamental Theory and Applications, vol.48, no.3, pp.261-271 (March 2001).
(2) K. Asami, H. Suzuki, H. Miyajima., T. T2aura, H. Kobayashi,"Technique to Improve the Performance of Time-Interleaved A-D Converters with Mismatches of Non-linearity,"IEICE Trans. Fundamentals, vol.E92-A, no.2, pp. 374-380(Feb. 2009).
(3) M. El-Chammas and B. Murmann, “A 12-GS/s 81-mW 5-bit Time-Interleaved Fash ADC with Background Timing Skew Calibration,” IEEE J. Solid-State Circuits, vol. 46, pp. 838-847 (Apr. 2011).
(4) B. Razavi, “Problem of Timing Mismatches in Time-Interleaved ADCs,” IEEE Custom Integrated Circuits Conference, (Sept. 2012).
(5) K. Asami, H. Miyajima, T. Kurosawa, T. Tateiwa, H. Kobayashi, “Timing Skew Compensation Technique Using Digital Filter with Novel Linear Phase Condition,” IEEE International Test Conference, Paper 11.3, Austin, TX (Nov. 2010).
(6) K.Asami, T.Tateiwa, T. Kurosawa, H.Miyajima, H. Kobayashi, "Digitally-Assisted Compensation Technique for Timing Skew in ATE Systems",IEEE International Mixed-Signals, Sensors, and Systems Test
33
Workshop,Santa Barbara, CA (May 2011)
(7) 浅見幸司, 黒沢烈士, 立岩武徳, 宮島広行, 小林春夫 「インターリーブ ADC でのタイミングスキュー影響のディジタル補正技術」電子情報通信学会 集積回路研究会 (2009 年 10 月)
(8) K.Asami, T. Kurosawa, T.Tateiwa, H.Miyajima, H. Kobayashi,"Novel Linear Phase Condition for Digital Filter,"第 25 回信号処理シンポジウム、奈 良 (2010 年 11 月)
(9) M. R. Schroeder, ”Synthesis of Low-Peak-Factor Signals and BinarySequences With Low Autocorrelation”, IEEE Trans. Information Theory,pp.85-89 (1970).
(10) H. Kitayoshi, S. Sumida, K. Shirakawa and S. Takeshita,”DSP Synthesized Signal Source for Analog Testing Stimulus andNew Test Method”, IEEE International Test Conference, pp.825-834, (1985).
(11) 楢橋祥一, 野島俊雄「マルチトーン信号のピーク対平均電力比(PAPR) を 低 減 す る 初 期 位 相 設 定 法 」, 電 子 情 報 通 信 学 会 論 文 誌 B-II, vol. J78-B-II,no.11, pp.663-671 (1995 年 11 月)
34
謝辞
本研究を進めるに当たり、指導教官である群馬大学工学部 小林春夫教授に は、ご指導ご鞭撻を頂き深く感謝いたします。また共同研究として、御指導・ 御支援して頂いた株式会社アドバンテストの浅見幸司様に深く感謝致します。 そして本研究を完成させる中で、お世話になりました群馬大学の高井伸和准 教授、新津葵一助教、石川信宣様、立岩武徳様、鶴岡工業高等専門学校の加藤 健太郎様、及び小林研究室の皆様に心から感謝申し上げます。 また本論文の審査において、お世話になりました伊藤直史准教授に心から感 謝申し上げます。 本研究を進めるに当たり、多くの有益な情報を頂きました他大学および関連 する関係者の皆様に心から感謝申し上げます。 最後に、本研究を進めるに当たり、群馬大学大学院への進学を最後まで暖か く支援してくれた家族に心から感謝致します。 以上のように、本研究は多くの方々の御指導・御支援にもとに遂行されまし た。本研究に関係した全ての皆様に改めて深く感謝申し上げます。35
本論文の功績
(1) 浅見幸司,立岩武徳,黒沢烈士,易茹,荒川雄太,小林春夫,「線形位相遅延デ ィジタルフィルタの実装の検討」第13回DSPS 教育者会議,ポスターセッショ ン,東京都市大学(2011 年 9 月 2 日) (2) 易茹,立岩武徳,浅見幸司,小林春夫,「遅延デジタルフィルタの分散型積和 演算回路を用いた FPGA 実装の検討」,電気学会栃木・群馬支所主催,研究発表 会, (2012 年 2 月 29 日)(3) Ru Yi, Atsuhiro Katayama and Haruo Kobayashi,”Fully Digital Calibration of Timing Mismatches in Interleaved ADC”, 4th International Conference on Advanced Micro-Device Engineering,Kiryu, Japan (Dec. 7, 2012)
(4) 易茹,片山敦弘,呉明輝,小林春夫,加藤健太郎,「インターリーブADCでの タイミングスキューのディジタル手法による検出・補正技術」,電気学会 電子回 路研究会、明治大学 (2013 年 3 月 7 日)