文章编号:0258-2724(2018)05-0893-07 DOI: 10.3969/j.issn.0258-2724.2018.05.003
一种改进的 LBP 特征实现铁路扣件识别
王 强
1,2,李柏林
1,侯 云
1,范 宏
1(1. 西南交通大学机械工程学院,四川 成都 610031;2. 成都工业学院机械工程学院,四川 成都 611730)
摘 要:为了提高铁路扣件基于视觉的自动化检测精度,提出了一种改进的 LBP (local binary pattern)编码算法.
该方法为了避免基本 LBP 对噪声敏感问题,根据不同邻域的不同噪声强度,结合测量误差服从高斯分布的原则, 计算邻域内像素均值和偏差;根据偏差大小,自动设置阈值,实现自适应噪声抑制. 为了避免基本 LBP 表达邻域 差分关系不完整的缺陷,提出了利用邻域内随机采样的方式得到采样点对,通过比较随机点对的差分关系得到 LBP编码. 对在晴天、阴天、雨天等不同天气条件下的铁路扣件图像上进行实验,并与原始以及其他改进 LBP 进 行比较. 结果表明,本文的算法具有更高的检测准确率,晴天提高了 3.32%,阴天提高了 3.27%,雨天提高了 4.10%,能够满足铁路扣件自动化检测的需要. 关键词:LBP;抗噪声;扣件;图像识别;图像检测 中图分类号:TP391.41 文献标志码:A
An Improved LBP Feature for Rail Fastener Identification
WANG Qiang
1,2, LI Bailin
1, HOU Yun
1, FAN Hong
1(1. School of Mechanical Engineering, Southwest Jiaotong University, Chengdu 610031, China; 2. College of Mechanical Engineering,Chengdu Technological University,Chengdu 611730,China)
Abstract: An improved LBP (local binary pattern) algorithm is proposed to raise the auto-detection accuracy on
fasteners. The original LBP is sensitive to noise. To solve this problem,the pixel means value and deviation are calculated, according to the different noise in different neighborhood and the measuring error is following the Gaussian distribution. Then the threshold is set to realize adaptive noise suppression,according to the deviation values. The original LBP cannot completely express the neighboring difference relationship. To avoid this defect, the proposed method gets the sampled point pairs by random sampling in neighborhood. Then LBP coding is generated through comparing the difference relationship of random point pairs. Tests are carried on fasteners images on clear,cloudy and rainy days with original and other improved LBP algorithms. The comparing results show the proposed method owns more detection accuracy. The detection accuracies increase by 3.32%,3.27% and 4.10% independently on clear, cloudy and rainy days, which shows the proposed method can meet auto-detection on railway fasteners.
Key words: LBP; anti-noise; fastener; image recognition; image detection
铁路扣件是固定轨道的紧固件. 在长期的运行
中,扣件可能丢失、断裂. 扣件缺陷直接影响到铁路
运输的安全. 传统的扣件状态检测主要通过人工巡
检来完成,效率太低,已经无法满足现代铁路运输的
需要. 因此,有必要采用自动化的检测方式. 采用视
觉进行检测是目前比较理想的方式. 近年来,关于铁
收稿日期:2017-08-08 基金项目:国家自然科学基金资助项目(51275431) 作者简介:王强(1979—),男,博士研究生,研究方向为计算机视觉、图像处理,E-mail: [email protected] 通信作者:李柏林(1962—),男,教授,博士生导师,研究方向为计算机图形图像处理,E-mail: [email protected] 引文格式:王强,李柏林,侯云,等. 一种改进的 LBP 特征实现铁路扣件识别[J]. 西南交通大学学报,2018,53(5): 893-899.WANG Qiang, LI Bailin, HOU Yun, et al. An improved LBP feature for rail fastener identification[J]. Journal of Southwest Jiaotong University, 2018, 53(5): 893-899.
路扣件的自动化检测已经取得一些成果
[1-4],但是还
不能满足铁路扣件自动化检测的要求,扣件的缺陷
可能酿成重大事故
[5]. 文献[
2
]中采用小波分析和多
层感知器神经网络检测扣件. 文献[
6
]中采用方向场
算法结合模板匹配检测扣件状态. 实际线路受到光照
不均匀,复杂背景等影响,图像质量较差,因此,这些
方法的识别率不高. 文献[
7
]中的方法也存在算法实
用性不强等缺点. 文献[
8
]中采用结合 PHOG(pyramid
histogram of oriented gradients)和
MSLBP(macrosco-pic local binary pattern)特征的方式对扣件进行识
别,该方法首先利用 Canny 算子提取边界,然后定
位扣件端部. 但是由于图像质量较差,Canny 算子提
取的边界并不准确,而且,人工设置 Canny 算子的
阈值不适合自动化检测.
LBP(local binary pattern)算子采用圆形邻域圆
周上的像素与中心像素的差分表示中心像素值. 该
算法具有光照不变性,算法简单且能够很好的表达
图像纹理特征,使得 LBP 算法可以用于铁路扣件的
检测. 目前 LBP 已经广泛应用在人脸识别
[9-10]、纹理
分类
[11-15]、目标识别
[16]、动态纹理识别
[17]、图像分类
[18]等方面. 但是,LBP 算子对噪声敏感. 文献[
19
]中提
出一种均匀 LBP 编码,能够部分抑制噪声,但丢失
了某些信息,这些丢失的信息对图像识别也是有用
的. 文献[
9
]在均匀 LBP 的基础上,提出结合其他编
码位的信息确定 1 个 LBP 编码是否是均匀 LBP 编
码,能够部分抑制噪声. 文献[
20
]提出三元编码算法
LTP,该方法也具有一定的噪声抑制能力. 此外,还
有DLBP(dominant local binary pattern)
[14],FLBP(fuzzy
local binary pattern)
[21]等改进的 LBP 编码. 但是这些
方法没有考虑测量本身的误差且采样位置固定,编
码结果表现局部纹理特征有限,不能提供检测准
确率.
1 LBP 简介及问题
1.1 基本 LBP 算法简介
r pc pi(i= 0,1,· · ·,n − 1) T= t(p0− pc, p1− pc,···, pn−1− pc)设基本 LBP 采样半径为 ,中心点 ,邻域点
. 定义邻域点与中心点联合差分
分布
,该分布表示
图像局部纹理信息. 文献[
11
]中证明差分大小关系可
以反映原始图像大部分的纹理信息.
s(x)设阈值函数
代表差分大小关系,有
s(x)= {1, p i⩾ pc, 0, pi< pc. (1)由式 (1) 得到基本 LBP 编码为
[19] TLBPn,r(xc,yc)= n−1 ∑ i=0 s(x)2i. (2)基本 LBP 采用单个像素之间比较大小进行编
码,容易受噪声影响,因为任何一个像素受到噪声影
响将直接改变其编码结果.
1.2 其他改进的 LBP
U均 匀 LBP 定 义 表 示 式 (2) 中 二 元 编 码 从
“0”到“1”或从“1”到“0”的跳变次数
[22],即
U(TLBPn,r)= |s(pn−1− pc)− s(p0− pc)|+ n−1 ∑ i=1 |s(pi− pc)− s(pi−1− pc)|. (3)统计发现,大部分 LBP 编码从“0”到“1”或
从“1”到“0”的跳变次数不超过 2 次. 定义跳变
次数不超过 2 次的编码保持不变,所有大于 2 次的
编码归为一类,由此得到均匀 LBP(LBP
U2). 均匀
LBP
编码降低了维度,而且保留了图像上大部分特
征,在一定程度上降低了噪声. 文献[
9
]中在均匀
LBP
的 基 础 上 , 提 出 了 一 种 噪 声 抑 制 编 码 方 法
NRLBP(noise-resistant local binary pattern),根据差
分较小的灰度值更容易受到噪声影响,从而改变
LBP
编码值的特点,提出将差分较小的灰度值差分
大小设为不确定位,通过结合其他编码位的值,判断
不确定位取“0”或“1”能否形成均匀 LBP 编码
来确定其真实值.
1.3 问题分析
基本 LBP 对噪声敏感. 均匀 LBP 丢失了部分信
息. 如直线,因为跳变次数大于 2 而被排除. NRLBP
或 LTP(local ternary pattern)需要手工设置阈值,不
同的图像,阈值差别很大,无法实现自动识别. 而且,
NRLBP
和 LTP 没有考虑噪声的强度,如果图像上
噪声强度不一样,则阈值将失效. 因为 NRLBP 和
LTP
都是采用全局阈值,对局部噪声强度差异将无
能为力. 此外,这些编码方法位置固定,而且采样点
太少,不能够完整地表达邻域的差分分布关系.
2 本文提出的方法
2.1 噪声抑制方法
常用的噪声抑制方法均存在缺陷,如高斯滤波
会模糊边界,邻域内有灰度值明显偏离其他值,表明
受到了噪声影响,应该排除该值,否则将让滤波结果
偏离真实值. 如均值滤波,噪声点参加均值滤波将明
显增加或减小均值大小,但是通常的滤波方法并没
有考虑这一点.
灰度值是物体对光照强度测量的反映. 图像上
某邻域灰度值是对物体某个区域的测量结果. 如果
只考虑光照影响,邻域灰度值应该非常接近. 所以当
灰度值严重偏离测量均值,可以看成噪声点. 文献[
22
]
中证明了像素灰度值服从正态分布. 根据误差判断
原则,多次测量的结果也满足正态分布,噪声是测量
结果明显偏离真实值的粗大误差. 当灰度值偏离真
实值的误差超过±2σ(σ 为标准偏差) 时,可以看成是
噪声点.
像素灰度值满足正态分布,正态分布的数学表
达式为
y= 1 σ√2π e−δ 2 2σ2, (4) y式中: 为概率分布密度;δ 为残差,是测量值与真实
值之差.
s× s pi(i= 0,1,2,· · ·, n px δ σ设 图 像 上
大 小 的 邻 域 ,
n – 1)
表示邻域内 个像素,可以计算邻域均值 、
和 .
(−∞,+∞)标准正态分布在
范围内,概率为
P= w+∞ −∞ ydδ = w+∞ −∞ 1 σ√2πe −2σδ22dδ =1. (5) (−δ,+δ) t= δ/σ如 果 取 误 差 区 间 为
, 令
, 则
式(5)为
P= √1 2π w+t −t e −t22dt= √2 2π wt 0e −t22dt. (6) P= 2ϕ(t)令
,则有
ϕ(t) = √1 2π wt 0e −t22dt, (7) t ϕ(t)式中: 为置信系数;
是拉普拉斯函数.
t= 2 ±2σ ±2σ 3× 3 ±2σ由式(7)可知局部邻域内灰度值在一定范围内
的置信概率. 当
时,结果在
范围内的置信
概率为 95.44%. 由概率论可知,当置信概率达到
95.44%
时是可信的. 由此可以确定,局部邻域内灰
度值偏差范围一定在
范围内,当偏差超过这个
范围,则认为是噪声,可以排除该值.
图 1
为进行噪
声抑制的过程. 左边是图像某一局部区域,中间是
邻域灰度值. 左上角的灰度值明显偏离其他值.
通过计算,限制误差范围在
范围内,可以确定
“79”是噪声点,将“79”排除. 在剩下的灰度值中
重复上述计算,直到没有误差影响,最后将所有剩下
的灰度值的平均值作为该邻域的值进行 LBP 编码.
每个邻域的噪声强度不同,采用该方法可以很好地
消除图像噪声.
71 68 68 79 75 71 70 71 72 68 71 68 75 71 70 72 71 |δ| = 2σ 图 1 噪声抑制过程示意Fig. 1 Schematic diagram of noise suppression process
2.2 随机采样 LBP 编码
r= 2基本 LBP 只是圆形邻域内圆周上的像素与中
心像素的联合差分分布. 这种采样方式有很大的缺
陷. 首先,采样点较少,如在采样半径
的邻域
内,只选择了 8 个邻域点与中心像素进行编码,这种
稀疏采样不可避免会丢失很多信息;其次,采样点位
置固定,邻域内很多像素之间的差分关系没有表达,
导致得到的差分算子判别性低.
N× N为了更完整的表达邻域内的联合差分分布,提
高描述算子的判别性. 本文提出一种随机采样的
LBP
编码方式,采样点的选择不再局限于圆周上,联
合差分分布也不只是邻域像素与中心像素之间进行
比较. 在
邻域内,采样点是随机选择,邻域内
的联合差分分布通过比较随机点之间的差分得到.
理论上,邻域内的特征由整个邻域内像素点之间的
关系可以完全表达. 点的数量越少,表达邻域特征越
少,描述算子判别性越低,而增加采样点可以提高描
述算子的判别性. 此外,采样位置不再固定,这样可
以充分表达各种位置关系之间的差分分布,从而可
以相对完整的表达整个邻域的差分关系.
N× N r设邻域大小为
,采样半径为 的圆形邻
域. 在圆形邻域内选择随机点对,定义差分大小判别
函数
[16]为
s(p; x,y) := { 1, p(x) ⩾ p(y), 0, 其他, (8) p(·)式中:
代表该位置的像素值.
n设邻域点对数量为 ,中心点二元表示为
TLBPn,r= n−1 ∑ i=0 2i−1s(p; xi,y i). (9) C2 n如果邻域内所有点之间的差分关系都用于编
码,将是完备的联合差分分布,但是得到的是 位
二元编码,位数太多不利于编码. 利用随机采样降低
维度,并且得到的编码是完备集的子集,显然其他
LBP
编码也是完备集的子集. 子集越接近完备集,描
r= 2 5× 5
述算子判别性越高,通常的 LBP 采样点过于稀疏,
如
的邻域内有 25 个点,却只利用了 8 个点,而
且位置固定. 如果将 1 个邻域都看成 1 个特征,提出
的方法参与编码的点更多,能够更全面的表达邻域
关系.
图 2
为随机选择点对进行 LBP 编码的示意,
在
邻域内,共选择 16 个随机点.
59 63 65 58 57 66 52 51 46 40 68 54 51 59 52 45 57 56 48 50 47 50 72 40 39 p 1 p2 p3 p4 p5 p6 v7 p8 p9 p10 p 11 p12 pc p13 p14 p15 p16 p17 p18 p19 p 24 p 23 p 22 p 21 p 20 ( p3, p19) 1 ( p4, p12) 1 ( p7, p18) 1 ( p 8, p16) 0 ( p 9, p17) 0 ( p 10, p11) 0 ( p13, p22) 0 ( p14, p15) 1 LBP: 11100001 图 2 随机选择点对 LBP 编码示意Fig. 2 Schematic diagram of LBP coding for random point pairs
r= 2 r
LBP
编码选择
比较合适. 太小无法体现
邻域纹理特征,反之,采样点过于稀疏,也不利于纹
理特征的表达. 此外,为了避免采样点出现极端情
况,如点的分布严重倾向于邻域某一部分或重复采
样,首先生成多个随机点,然后随机选择第一个点,
下一点的选择需要考虑与已选择点的距离,只有当
距离大于一定值时,才允许选择. 同时,编码后的点
不允许再次选择,这样有效避免了点的重复或过于
集中. 为了提高编码速度,随机点的位置在编码前预
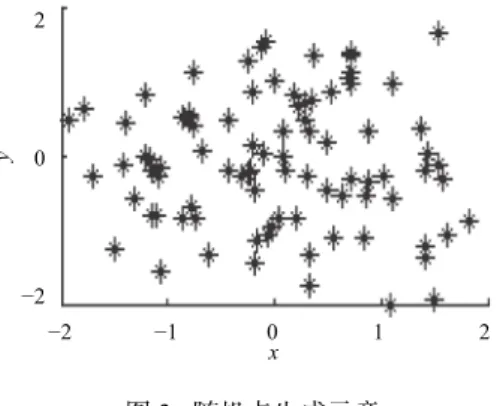
先确定. 随机点的生成如
图 3
所示.
2 0 −2 −1 0 1 2 −2 x y 图 3 随机点生成示意Fig. 3 Schematic diagram for random points generating
2.3 算法实现过程
4× 4 2× 2实际测量中,通过对测量次数进行统计,当测量
次数大于 20 以后,对提高测量精度影响不大. 因此,
测量次数选择 10~20 次之间比较合适,本文选择邻
域为
,即对同一个位置进行 16 次测量. 算法首
先得到随机点位置,按照向下取整和向上取整得到
随机点的
邻域,然后将邻域向四周分别加 1,
4× 4得到
的邻域. 再利用前述噪声抑制方法去噪,
最后求取平均值进行 LBP 编码. 为了提高运算速
度,首先对图像进行整体去噪,然后对图像积分. 具
体实现算法如下:
s× s |δ| = 2σ取邻域大小
,根据
对图像去噪;
计算图像积分;
N× N n设置邻域大小
,设置点数量 ;
px py生成随机数,得到随机点的位置 和 ;
for 图像中每一个像素值 do;
pc得到采样中心 ;
s× s根据图像积分结果计算
邻域平均值为
p¯x= 1 s× s s×s ∑ i=1 pxi, p¯y= 1 s× s s×s ∑ i=1 pyi, pxi pyi s× s这里 和 为各自
邻域中的任意值.
px py根据式(8)计算 和 的差分;
根据式(9),得到中心像素的 LBP 编码值;
end for.
3 实验结果
为了测试算法的性能,以实际线路上的扣件图
像作为测试数据,包括晴天、阴天和雨天等不同天气
的图像.
图 4
为不同天气条件下采集的图像.
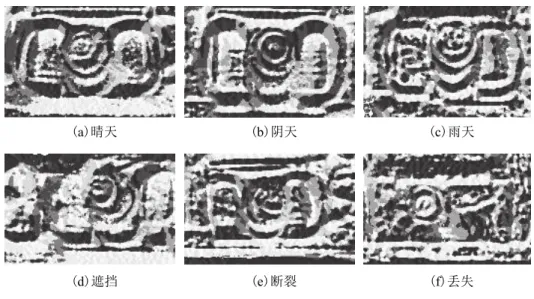
图 5
为
本文编码结果.
图 6
为晴天下不同 LBP 的编码结果.
扣件检测即正确识别出是否存在缺陷. 由于被遮挡
的扣件需要人工干预确定扣件状态. 因此,丢失、断
裂 和 遮 挡 都 称 为 扣 件 缺 陷 . 实 验 对 比 了 LBP
[19]、
LBP
U2[19]、LTP
[20]、DLBP
[14]、FLBP
[21]和 NRLBP
[9]. 采用
最近邻分类,以图像直方图作为特征,通过计算直方
图之间的卡方距离完成. 卡方距离为
χ2(p,q) =∑ i=0 (pi− qi)2 qi , (10) p q式中: 和 为图像直方图.
为了让 LBP 编码后的图像保持一定的位置关
系,将编码后的图像进行分块,计算每一块的直方图
并将所有的直方图连接成一个直方图.
r= 2测试以统计正确检测扣件数量来比较算法的性
能. 实际线路上缺陷扣件较少,因此,实验通过线路
采集和人工合成的方式,在 3 种天气情况下,分别选
择遮挡、断裂和丢失样本各 1 000 张,正常扣件各
3 000
张,对 3 种天气下的扣件分别进行测试. 实验
通过交叉验证完成. 将每种天气下的扣件平均分为
5
份,每次选择 1 份作为训练集,剩下的作为测试
集,共进行 5 次实验. LBP 编码
,扣件图像大小
180× 120
,LBP 编码后,在 和 方向采用
x y 3× 3分
块得到分块后的直方图,作为特征向量. 最后计算测
试集和训练集的卡方距离,卡方距离最小的被认为
相似性最高. 实验得到了 3 种天气下的平均识别
率. 实验采用 C++结合 opencv 2.4.9 编码,在单线程
Intel i5 2.5 GHz 处理器上实现.
(a)晴天 (b)阴天 (c)雨天 图 4 不同天气下扣件Fig. 4 Fastener images under different weathers
(a)晴天 (b)阴天 (c)雨天
(f)丢失 (e)断裂
(d)遮挡
图 5 本文编码图像示例
Fig. 5 Schematic diagram for coding images
(d)LTP( < t) (e)本文的方法
(a)基本 LBP (b)均匀 LBP (c)LTP( > t)
图 6 LBP 编码图像对比示例 Fig. 6 Contrast examples for coding images
LTP、NRLBP 和 FLBP 算法需要人工设置阈值.
由于噪声强弱不同,不同的阈值得到的识别率区别
很大. 实验对这 3 种算法选取不同的阈值,确定识别
率最高的阈值进行编码.
图 7
为 3 种算法对于扣件
图像选择不同阈值的识别结果示意,选择晴天的扣
件图像.
1 2 3 4 5 6 7 8 9 10 82 84 86 88 90 92 94 96 FLBP LTP NRLBP 识别率 /% 阈值 图 7 扣件图像不同阈值下 3 种编码方式的识别率 Fig. 7 Fastener Recognition rates of three coding methodswith different thresholds
在光照比较好的条件下,晴天图像比较清晰,而
阴天和雨天的扣件图像光照较差,尤其是雨天,即使
肉眼也难以分辨扣件状态. 如果一种编码能够明显
的体现图像特征,则根据特征进行图像检测,将大大
提高准确率. 基本 LBP 或其他改进算法具有局限
性,无法完整表达邻域之间的差分关系.
本文从整个邻域来考虑进行编码,得到各个位
置之间的差分关系. 为了不丢失信息,增加了采样点
的数量,得到的差分关系更加完整;同时,采用了一
种噪声抑制算法,让编码前的灰度值更接近真实值,
所以得到的特征更加明显.
表 1
~
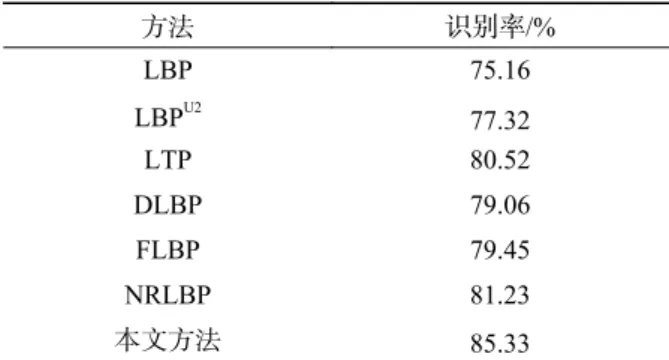
3
为不同天气条件
下扣件的识别率. 由
表 1
~
3
可以看出,如果光照条件
比较好,采集的扣件图像更清晰,因此,晴天扣件图
像识别率好于阴天和雨天. 雨天的扣件图像受到光
照影响较大,识别率较低. 但是不管哪种天气条件,
提出的算法还是明显好于其他算法.
表 4
为算法的时间对比. 测试了 1 000 张图像,
共进行了 3 次实验,统计平均时间效率. 由于本文的
算法需要判断噪声,计算时间复杂度略高于基本
LBP. 但是扣件检测的准确性更加重要,因此牺牲部
分时间效率是值得的,本文算法大约每秒检测 6 张
图像,如果硬件设备改进,检测速度可以提高 1 倍以
上,完全能够满足实际检测需要.
4 结束语
针对扣件检测准确率不高的问题,提出了一种
改进的 LBP 算法. 该方法能够更完整的表达邻域内
的差分关系,更明显的体现图像局部纹理结构. 同
时,利用提出的滤波方法,能够适应不同强度的噪
声,让编码结果更加稳定. 在扣件上测试的结果显
示,比其他方法的检测准确率提高了 3% 左右.
表 1 晴天扣件识别率 Tab. 1 Fastener recognition on clear day方法 识别率/% LBP 89.35 LBPU2 90.46 LTP 91.85 DLBP 90.89 FLBP 91.42 NRLBP 93.62 本文方法 96.94 表 2 阴天扣件识别率 Tab. 2 Fastener recognition on cloudy day
方法 识别率/% LBP 85.76 LBPU2 86.59 LTP 88.03 DLBP 86.95 FLBP 88.72 NRLBP 89.57 本文方法 92.84 表 3 雨天扣件识别率 Tab. 3 Fastener recognition on rainy day
方法 识别率/% LBP 75.16 LBPU2 77.32 LTP 80.52 DLBP 79.06 FLBP 79.45 NRLBP 81.23 本文方法 85.33 表 4 计算时间对比 Tab. 4 Computation time comparisons
方法 时间/s
LBP 108.711
参考文献:
SINGH M, SINGH S, JAISWAL J, et al. Autono-mous rail track inspection using vision based system[C]// IEEE International Conference on Computational Intelligence for Homeland Security and Personal Safety. [S. l.]: Alexandria:IEEE, 2006: 56-59.
[ 1 ]
MARINO F, DISTANTE A, MAZZEO P, et al. A real-time visual inspection system for railway maintenance: automatic hexagonal-headed bolts detection[J]. IEEE Transactions on Systems,Man,and Cybernetics,Part C (Applications and Reviews), 2007, 37(3): 418-428.
[ 2 ]
YELLA S, DOUGHERTY M, GUPTA N. et al. Condition monitoring of wooden railway sleepers[J]. Transportation Research Part C: Emerging Technolo-gies, 2009, 17(1): 38-55.
[ 3 ]
许贵阳,史天运,任盛伟,等. 基于计算机视觉的车载 轨道巡检系统研制[J]. 中国铁道科学,2013,34(1): 139-144.
XU Guiyang, SHI Tianyun, REN Shengwei, et al. Development of the on-board track inspection system based on computer vision[J]. China Railway Science, 2013, 34(1): 139-144.
[ 4 ]
肖新标,金学松,温泽峰. 钢轨扣件失效对列车动态 脱轨的影响[J]. 交通运输工程学报,2006,6(1): 10-15. XIAO Xinbiao, JIN Xuesong, WEN Zefeng. Influence of rail fastener failure on vehicle dynamic derail-ment[J]. Journal of Traffic and Transportation Engineering, 2006, 6(1): 10-15.
[ 5 ]
YANG Jinfeng, WEI Tao, LIU Manhua, et al. An efficient direction field-based method for the detection of fasteners on high-speed railways[J]. Sensors, 2011, 11(8): 7364-7381.
[ 6 ]
XIA Yiqi, XIE Fengying, JIANG Zhiguo. Broken
railway fastener detection based on adaboost
algorithm[C]// International Conference on Opto-electronics and Image Processing. Beijing: IEEE, 2010: 313-316.
[ 7 ]
刘 甲 甲 , 李 柏 林 , 罗 建 桥 , 等 . 融 合 PHOG 和
MSLBP特征的铁路扣件检测算法[J]. 西南交通大学
学报,2015,50(2): 256-263.
LIU Jiajia, LI Bailin, LUO Jianqiao. et al. Railway fastener detection algorithm integrating PHOG and MSLBP features[J]. Journal of Southwest Jiaotong University, 2015, 50(2): 256-263.
[ 8 ]
REN J, JIANG X, YUAN J. LBP encoding schemes jointly utilizing the information of current bit and other LBP bits[J]. IEEE Signal Processing Letters, 2015, 22(12): 2373-2377.
[ 9 ]
REN J, JIANG X, YUAN J. Noise-resistant local binary pattern with an embedded error-correction mechanism[J]. IEEE Transactions on Image
Proces-[10]
sing, 2013, 22(10): 4049-4060.
GUO Zhenhua, ZHANG Lei, ZHANG D. A completed modeling of local binary pattern operator for texture classification[J]. IEEE Transactions on Image Processing, 2010, 19(6): 1657-1663.
[11]
SONG Tiecheng, LI Hongliang, MENG Fanman, et al. Noise-robust texture description using local contrast patterns via global measures[J]. IEEE Signal Processing Letters, 2014, 21(1): 93-96.
[12]
WANG Kai, BICHOT C, ZHU Chao, et al. Pixel to patch sampling structure and local neighboring intensity relationship patterns for texture classification[J]. IEEE Signal Processing Letters, 2013, 20(9): 853-856.
[13]
LIAO S, LAW M W K, CHUNG A C S. Dominant local binary patterns for texture classification[J]. IEEE transactions on image processing, 2009, 18(5): 1107-1118.
[14]
KWAK J T, XU S, WOOD B J. Efficient data mining for local binary pattern in texture image analysis[J]. Expert Systems with Applications, 2015, 42(9): 4529-4539.
[15]
SATPATHY A, JIANG X, ENG H L. LBP-based edge-texture features for object recognition[J]. IEEE Transactions on Image Processing, 2014, 23(5): 1953-1964.
[16]
REN J, JIANG X, YUAN J. et al. Optimizing LBP structure for visual recognition using binary quadratic programming[J]. IEEE Signal Processing Letters, 2014, 21(11): 1346-1350.
[17]
LI Wei, CHEN Chen, SU Hongjun, et al. Local binary patterns and extreme learning machine for
hyperspectral imagery classification[J]. IEEE
Transactions on Geoscience and Remote Sensing, 2015, 53(7): 3681-3693.
[18]
OJALA T, PIETIKAINEN M, MAENPAA T. Multiresolution gray-scale and rotation invariant texture classification with local binary patterns[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002, 24(7): 971-987.
[19]
TAN X, TRIGGS B. Enhanced local texture feature sets for face recognition under difficult lighting conditions[J]. IEEE Transactions on Image Processing, 2010, 19(6): 1635-1650.
[20]
AHONEN T, PIETIKAINEN M. Soft histograms for local binary patterns[C]//Proceedings of the Finnish signal processing symposium. Finsic: [s. n.], 2007, 5(9): 1-4.
[21]
WEINBERGER M J, RISSANEN J J, AERS R B. Applications of universal context modeling to lossless compression of gray-scale images[J]. IEEE Transac-tions on Image Processing, 1996, 5(4): 575-586.
[22]