平成
30
年度(2018年度)学位論文(修士)距 離 関 数 を 用 い た 任 意 物 体 形 状 ま わ り の
対 流 熱 伝 達 計 算
提出日:平成
31
年(2019年)1
月25
日首都大学東京大学院
システムデザイン研究科 システムデザイン専攻 航空宇宙システム工学域 博士前期課程
学修番号
17891522
氏名 中谷 優浩指導教員 田川 俊夫 准教授
i
目次
1.1
はじめに1.2
格子の生成方法1.3
塗装用乾燥炉の解析1.4
本研究の目的2.1
計算格子2.2
支配方程式2.3
無次元の支配方程式2.4
離散化スキーム2.5
距離関数2.6 IB
法2.6.1
滑りなし条件(No-Slip Wall)2.6.2
滑り条件(Slip Wall)2.7
壁面における温度境界条件2.7.1
等温加熱条件2.7.2
断熱条件2.7.3
物体内の熱伝導計算2.8
計算フロー3.1
平板境界層流れ(等温加熱条件)3.1.1
計算モデル3.1.2
計算結果3.2
対流熱伝達計算(物体内の熱伝導計算)3.2.1
計算モデル3.2.2
計算結果第
1
章 緒言 p.1第2章 解析手法 p.4
第
3
章 計算の妥当性検証 p.14
ii 4.1
計算モデル4.2
計算結果付録
A
支配方程式の無次元化p.31
付録
B IP
点における値の補間p.33
付録
C
境界条件の離散化p.35
付録
D Runge-Kutta
法を用いたBlasius
方程式の解法p.37
付録
E U
S N
とN u
の求め方p.40
付録
F
平板境界層計算の可視化結果p.42
第4章 乾燥炉解析への適用 p.23
第5章 結言 p.30
付録
参考文献 p.48
謝辞 p.50
iii
記号表
A
:IB法の補間に用いる係数の分母[ ] A
B, A
IP1, A
IP2 :IB法の補間に用いる係数の分子[ ]
C
C :無次元比熱[ ]
C
G :気相の比熱[J/(kg K)]
C
p :定圧比熱[J/(kg K)]
C
S :物体の比熱[J/(kg K)]
C
:比熱比[ ]
C
:比熱[J/(kg K)]
d
:平行平板高さ[m]
e
N :無次元単位法線方向ベクトル[ ] e
S :無次元単位接線方向ベクトル[ ] F
IB :IB法による無次元外力項[ ] H e
:Heaviside関数[ ]
h
s :局所熱伝達率[W/(m
2 K)]
k
C :無次元熱伝導率[ ] k
G :気相の熱伝導率[W/(m K)]
k
S :物体の熱伝導率[W/(m K)]
k
:熱伝導率比[ ]
k
:熱伝導率[W/(m K)]
s l i p
L
:滑り面長さ[m]
L
x :計算領域のX
方向長さ[m]
L
y :計算領域のY
方向長さ[m]
L
:代表長さ[m]
N u
:局所ヌセルト数[ ]
N
X :e
NのX
方向成分[ ]
N
Y :e
NのY
方向成分[ ]
N
:無次元法線方向座標[ ]
iv
n
:法線方向座標[m]
P r
:Prandtl数[ ]
P
:無次元圧力[ ]
p
:圧力[Pa]
Q
IB :IB法による無次元熱量[ ] R e
:Reynolds数[ ] S
X :e
SのX
方向成分[ ] S
Y :e
SのY
方向成分[ ] S
:無次元接線方向座標[ ]
s
:接線方向座標[m]
t
:時間[s]
U
B :物体壁面の無次元速度ベクトル[-]
U
I B :IB
点における無次元速度ベクトル[-]
U
IB :U
I BのX
方向成分[-]
U
I P :IP
点における無次元速度ベクトル[-]
U
IP :U
I PのX
方向成分[-]
U
in :無次元流入速度[-]
N I B
U
:U
I Bの法線方向成分[-]
N I P
U
:U
I Pの法線方向成分[-]
U
N :無次元法線方向速度[ ]
S I B
U
:U
I Bの接線方向成分[-]
S I P
U
:U
I Pの接線方向成分[-]
U
S :無次元接線方向速度[ ] U
:無次元速度ベクトル[ ] U
:無次元X
方向速度[ ]
u
in :流入速度[m/s]
u
move :物体の移動速度[m/s]
u
:速度ベクトル[m/s]
u
:x
方向速度[m/s]
v
V
IB :U
I BのY
方向成分[-]
V
IP :U
I PのY
方向成分[-]
V
:無次元Y
方向速度[ ]
v
:y
方向速度[m/s]
X
:無次元X
方向格子幅[ ] X
:無次元座標ベクトル[ ] X
:無次元X
方向座標[ ]
x
:座標ベクトル[m]
x
:x
方向座標[m]
Y
:無次元Y
方向格子幅[ ] Y
:無次元Y
方向座標[ ]
y
:y
方向座標[m]
:熱拡散率[m
2/s]
IP :IP点までの距離[ ]
1
IP :IP1点までの距離[ ]
2
IP :IP2点までの距離[ ]
IB :物体近傍範囲[ ]
:界面厚さ[ ]
X :距離関数のX
方向勾配[ ]
Y :距離関数のY
方向勾配[ ]
:距離関数[ ]
:動粘度[m
2/s]
:物体壁面の無次元温度[ ]
:IB点における無次元温度[ ]
IP :IP点における無次元温度[ ]
:無次元温度[ ]
hot :最大温度[K]
cold :最小温度[K]
:温度[K]
vi
C :無次元密度[ ]
G :気相の密度[kg/m
2]
S :物体の密度[kg/m
2]
:密度比[ ]
:密度[kg/m
2]
:無次元時間刻み[ ]
:無次元時間[ ]
:傾斜角度[deg]
Notations
:
y x
:
Y X
2 : 22 2 2
y
x
or
2 2 2 2
Y
X
1
第
1
章緒言
1.1
はじめにCFD(Computational Fluid Dynamics)とはコンピュータによって流体に関する方程式を解き,
解析する分野である.計算機の発達とともに発展し,現在は航空機,船舶,自動車などの機 械設計や,血液の流れなどの解析といった生理学の解明,地球ダイナモや気象のシミュレー ションといった地球科学の解明や予想など多種多様な分野で用いられている[1].
CFD
は実験と比較すると設備投資のコストが低い,条件の変更が容易,実験での再現が 困難な現象の解析が可能,目視できない流れの可視化が可能などの利点がある.しかし,数 値解析によって求まる方程式の解は近似解であり,実際の現象を完全に再現することは困 難である.したがって,CFD を利用する場合には誤差がどの程度発生するのかを把握して 用いなければならない.1.2
格子の生成方法流体計算に用いられる格子は大きく分けて境界適合格子,非構造格子,デカルト座標格子 の
3
種類に分類される.それぞれの特徴をTable1-1
に示す.デカルト座標格子は格子点あ たりの計算時間およびメモリが最小,格子生成が容易,空間高次精度が容易などの利点を持 つ.しかし,物体壁面が格子に沿っていない場合,物体形状の再現度を上げるために特別な 取り扱いが必要になる.また,十分な精度を確保するためには物体近傍で格子を細かくする 必要があり,必要なメモリが増加する.近年の計算機の発達によって,十分な格子数を確保 しつつ,実用的な計算時間で計算することができるため,デカルト座標格子の利用が見直さ れつつあり,複雑形状を対象にした流体解析への使用が期待される.デカルト座標格子における物体境界の再現精度を上げる手法として
IB
法(ImmersedBoundary Method)
[2]がある.IB法の優位性として以下の4
点が挙げられる.・格子生成にかかる手間が少ない
・物体形状が複雑化しても計算時間,計算負荷の変化が小さい
・移動物体境界問題への適応が比較的容易である
・高精度のスキームが利用できる
これらの利点から現在,盛んに研究が進められている.また,IB 法は格子と境界壁面のな す角度によって精度が変化するという問題がある[3][4].多くの
IB
法による解法が提案され ており,周囲の速度から補間して速度を与える手法[3][4][5][6][7],物体壁面付近で壁面の位置を2
考慮して離散する手法[8][9][10][11]などがある.また,物体を考慮して圧力修正の反復を行うこ とで精度を向上させる手法も開発されている[12][13].IB法を用いたモデルとして乱流解析な ど多くのモデルが検証されているが熱伝達を含むモデルは少なく,定量的に評価する必要 がある.移動物体まわりの熱伝達を計算することができれば,自動車の塗装用乾燥炉の解析 や食品加熱工程の解析といった加熱されながら物体が移動する生産ラインの最適化シミュ レーションに応用することができ有益であるといえる.
Table1- 1 格子の種類
[14]格子の種類 境界適合格子 非構造格子 デカルト座標格子
格子生成 ・簡単な形状は容易
・3 次元複雑形状には 単一格子の形成が困 難
・任意形状に対して自 動形成可
・解適合格子が容易
・格子作成の計算量が 大きい
・任意形状に対して自 動形成可
・解適合格子が容易
計算精度 及び 計算時間
・高効率,高精度な解 法
・物体表面近くの精度 が必要な問題に適し ている
・計算時間は境界適合 格子と遜色ないレベ ルに達した
・ メ モ リ 要 求 が 大 き く,空間高次精度化 も困難
・格子点当たりの計算 時 間 お よ び メ モ リ は最小
・物体境界の精度が特 別 な 扱 い な し で は 悪い
1.3
塗装用乾燥炉の解析自動車の製造する際,車体を塗装液で満たされたプールに通し,車体表面をコーティング した後,左右から熱風を当てることで塗装液を乾燥させる処理がある.自動車製造において,
乾燥工程におけるエネルギー消費は全体の中でも大きな割合を占めており,その削減は重 要な課題である.
Fig1-1
に株式会社ディライトによって解析された例を示す[15].このとき車3
1
http://ipconet.org/seminar/2014kyusyu/paper%205.pdf
体はレールに乗って乾燥炉内を等速で移動する.左右の側壁に熱風が出入りする流入口と 抜ける流出口があり,徐々に車体が熱される.現在,塗装用乾燥炉の解析には非構造格子を 用いることが多く,格子を形成するための計算負荷が大きく,メッシュを手直しする処理が 必要になることも多い.また,流体計算は計算に時間を要するため,熱風の流入口からの距 離や流入速度,流入角度などを用いて温度や熱伝達率をモデル化して解析されることもあ る[16].
IB
法を用いてデカルト座標格子で計算することで,格子生成にかかる手間を省くことが でき,プリ処理の負担を軽減させることができる.しかし,デカルト座標格子では非構造格 子を用いるより格子を細かくする必要がある.近年の計算機の発達によりデカルト座標格 子を用いて格子を十分細かくすることができ,かつ実用的な計算時間で解析することがで きる.今後,更なる計算機の発達によって移動物体の解析はデカルト座標格子が主流になる ことが考えられる.Fig. 1- 1 塗装用乾燥炉の解析例
11.4
本研究の目的デカルト座標格子を用いて任意物体形状まわりの流れを精度良く計算するために,IB 法 を応用し,距離関数を用いて壁面温度境界条件を与える手法の導入とその手法の妥当性の 検証を本研究の目的とする.ここでは物体内部を等温とし,壁面で等温加熱条件を与えた計 算と物体内部の熱伝導を考慮し,対流の影響によって壁面で熱流束が異なる計算を行った.
4
章では応用例として乾燥炉を模擬した計算を行った.4
第2章
解析手法
2.1
計算格子本研究ではデカルト格子を用い,空間の離散化は
Fig.2-1
に示すような等間隔のスタッガ ード格子を用いた.圧力や温度などのスカラー量をセルの中心に定義し,ベクトル量である 速度をセルの境界に定義する[17].2.2
支配方程式支配方程式は以下に示す通りである.
<連続の式>
0
u (2.1)
<Navier-Stokes方程式>
1
2u u u p u
t
(2.2)
<エネルギー方程式>
u
2t
(2.3)
j
u
i,u
i1,j1, i j
u
2, i j
u
, 1
u
i j 1, 1i j
u
u
i j, 11, 1 i j
u
u
i j, 1,
p
i j , 1p
i j, 1
p
i j1, i j
p
1, i j
p
,
v
i jv
i1,j1, i j
v
, 1
v
i j, 1
v
i jv
i 1,j11, 1 i j
v
, 2
v
i jFig. 2- 1 スタッガード格子の定義点
5
2.3
無次元の支配方程式無次元変数と無次元数は以下のように定義する.
-無次元変数-
X x
L ,
0
U u
u ,
0
t
L u ,
2 0
P p
u
,
co l dh o t co l d
(2.4)
-無次元数-
u L
0R e , P r
(2.5)
無次元化した支配方程式は以下のようになる.導出は付録
A
を参考のこと.ここで,
は 無次元のナブラ演算子である.<連続の式>
0
U = (2.6)
<Navier-Stokes方程式>
1
2U U U P U
Re
(2.7)
<エネルギー方程式>
U 1
2P r R e
(2.8)
2.4
離散化スキーム本研究では時間項に式(2.9)に示すようなオイラー陽解法を用いた.
n n 1 n
U U U
(2.9)
移流項に式(2.10)に示すような
UTOPIA
[18]を用いた.UTOPIA では計算する点における速度 の正負によって風上を決定し,参照点に計算点と風上側に2
点,風下側に1
点の計4
点を 用いて離散化する.計算領域の端と物体の近傍では1
次風上差分法を用いた.2 1 1 2
2 1 1 2
8 8
1 2
4 6 4
1 2
i i i i
i i
i i i i i i
U U U U
U U U
X X
U U U U U U
X
(2.10)
その他の離散化には
2
次精度中心差分法を用いた.6
2.5
距離関数距離関数とは壁面境界からの無次元符号付き距離であり,ここでは
とおく.本研究では 物体外部を正,物体内部を負とし,スカラー点とベクトル点のすべての位置で定義した.例 として,座標 1, 1
を中心とする半径0.5
の円柱を計算した.任意の点 X Y ,
における距離関数
は式(2.11)のように表すことができる. X 1
2Y 1
20 . 5
(2.11)
この円まわりの距離関数を可視化したものを
Fig.2-2
に示す.図中の黒線は 0
の等高線で あり,円柱の壁面を示す.円柱の中心で最も値が小さく,計算領域の外側にいくに連れて値 が大きくなっていることがわかる.Fig. 2- 2 円まわりの距離関数
本研究では距離関数を
IB
法の適用範囲の判定,IB
法の補間に用いる係数の計算,物体と 流体の遷移領域の計算に用いる.また,距離関数
のX
方向微分とY
方向微分をそれぞれ
X,
Yとすると壁面における無次元の単位接線方向ベクトルe
S,単位法線方向ベクトルe
N は式(2.12)のように表すことができる.これを用いてIB
法における補間点の座標を計算と 速度の接線方向,法線方向への変換をすることができる.2 2
2 2
Y
X Y
S
X
X Y
e
,
2 2
2 2
X
X Y
N
Y
X Y
e
(2.12)
7
2.6 IB
法2.6.1 滑りなし条件(No-Slip Wall)
物体境界に隣接する格子の速度をどのように決定するかは様々な方法が考案されている.
本研究では計算の安定性が良く,補間が簡略である
Direct Forcing IB
法(直接強制法)[3][4]によって速度を埋め込む.
IB
法では式(2.13)のようにNavier-Stokes
方程式に外力項F
IBを加 える.F
IBは式(2.14)から式(2.16)のように物体遠方,物体近傍,物体内部によって異なる式 で表される.U
I Bはまわりの速度から補間して求める速度であり,U
Bは物体の移動速度で ある.物体近傍の範囲を表す
IBは
IB 1.5 X
とすることで,物体壁面から少なくとも1
格 子は物体近傍に含むことができる. 1
2 I BU U U P U F
R e
(2.13)
物体遠方
IB
IB
0
F = (2.14)
物体近傍
0
IB
1
2 IB nIB
U U
F U U P U
Re
(2.15)
物体内部
0
1
2 B nIB
U U
F U U P U
Re
(2.16)
結局,物体遠方では
IB
法による操作を行わず,Navier-Stokes方程式の時間項にオイラー陽 解法を用いるため,物体近傍と物体内部では以下のように速度を与えることになる.物体近傍
0
IB
1 n
U
U
IB(2.17)
物体内部
0
1 n
U
U
B(2.18)
U
Bは移動物体では物体の移動速度である.本研究ではU
I Bを以下のように与えた.1 1 2 2
I P I P I P I P B B
I B
A U A U A U
U A
(2.19)
1 21
2 1 1 2
12
2 2 2 1 1, ,
IP IP IP IP IP IP IP IP IP IP
B IP IP IP IP
A A A
A
(2.20)
8
式(2.19)は
Fig.2-3
に示すようなIB
法によって速度を与えている.これは物体壁面上のB
点 の速度U
Bと物体壁面から
IP1離れたIP1
点の速度U
IP1と
IP2離れたIP2
点の速度U
IP2の計3
点の速度を用いたラグランジュ補間によって物体近傍のIB
点に速度を与えることを意味 する.U
IP1とU
IP2はそれぞれIP1
点とIP2
点の近傍4
点の速度を用いて線形補間し求め る.この補間方法に関しては付録B
で詳しく述べる.また,
IP1 3.0 X
,
IP2 4.5 X
と した.Fig. 2-3 物体近傍の補間(滑りなし条件)
2.6.2 滑り条件(Slip Wall)
滑り条件では物体遠方と物体内部は
2.6.1
節の滑りなし条件と同様にして与える[3].物体 近傍の速度U
I BはFig.2-4
のように壁面接線方向速度U
Sと壁面法線方向速度U
Nに変換して 条件を与える.IB
点での壁面接線方向速度U
S I Bと壁面法線方向速度U
N I Bを求め,U
S I BとN I B
U
をX
方向速度U
IBとY
方向速度V
IBに変換することで物体の影響を与える.壁面接線 方向速度は法線方向勾配 S0
U N
B
となるように与え,壁面法線方向速度は物体壁面で流 入出がないことが表されるように与える.U
S I Bは式(2.21)のように物体壁面から
IP離れたIP
点の壁面接線方向速度U
S I PをそのままU
S I Bに与える.これはIB
点での法線方向勾配の1
次精度前進差分が0
であることに等しい.ここで,
IP 3.0 X
とした.S IB S IP
U U (2.21)
N I B
U
は式(2.22)のように物体壁面上のB
点の壁面接線方向速度U
N BとIP
点の壁面接線方向速度
U
N I Pの2
点の速度を用いた線形補間で与える.
N IP IP N B
N IB
IP
U U
U
(2.22)
U
N Bは物体の移動速度を法線方向速度に変換して与える.本研究では静止物体でしか滑り 条件を用いないため,U
N B 0
となる.U
S I PとU
N I PはIP
点の速度U
I Pを近傍の4
点から補U
IBU
B 1U
IP1 IP
IB
B
IP2
U 2
IP
9
間して求め,壁面接線方向と壁面法線方向に変換し求める.単位接線方向ベクトル
,
S X Y
e S S
,単位法線方向ベクトルe
N N
X, N
Y
とすると,この変換は行列A
を用いて 式(2.23)のように表される.また,IB点で求めたU
S I BとU
N I Bは式(2.24)を用いてU
IBとV
IB に変換する.e
Sとe
Nは2.5
節で述べた通り距離関数
を用いて求める.S I P I P I P X I P Y
N I P I P I P X I P Y
U U U S V S
U V U N V N
A (2.23)
-1 S I B S I B Y N I B Y
I B
I B N IB S I B X N I B X
U N U S
U U
V U U N U S
A (2.24)
X Y
X Y
S S
N N
A (2.25)
(a)
接線方向速度(b)
法線方向速度Fig. 2-4 物体近傍の補間(滑り条件)
IP
IB B
SIP
U
SIB
U
IP
IB B
U
N BU
N IBU
N IP10
2.7
壁面における温度境界条件2.7.1
等温加熱条件速度境界条件と同様に
IB
法を用いて物体内部と壁面近傍の温度を与える.式(2.26)のよう にエネルギー方程式に熱量Q
IBを加える.Q
IBは式(2.27)から式(2.29)のように物体遠方,物 体近傍,物体内部によって異なる式で表される.
IBはまわりの温度から補間して求める温 度であり,
Bは物体の壁面温度である.物体近傍の範囲を表す
IBはここでも
IB 1.5 X
とした. U 1
2Q
I BP r R e
(2.26)
物体遠方
IB
IB
0
Q = (2.27)
物体近傍
0
IB
1
2 IB nQ
IBU
PrRe
(2.28)
物体内部
0
1
2 B nQ
IBU
PrRe
(2.29)
結局,物体遠方では
IB
法による操作を行わず,エネルギー方程式の時間項にオイラー陽解 法を用いるため,物体近傍と物体内部では以下のように温度を与えることになる.物体近傍
0
IB
1 n
IB(2.30)
物体内部
0
1 n
B(2.31)
Bは物体の壁面温度であるため等温加熱条件では一定の値を持つ.本研究では
IBを以下 のように与えた.1 1 2 2
I P I P I P I P B B
I B
A A A
A
(2.32)
1 2 1
2 1 1 2
12
2 2 2 1 1, ,
IP IP IP IP IP IP IP IP IP IP
B IP IP IP IP
A A A
A
(2.33)
これは物体壁面上の
B
点の温度
Bと物体壁面から
IP1離れたIP1
点の温度
IP1と
IP2離れ たIP2
点の温度
IP2の計3
点の温度を用いたラグランジュ補間によって物体近傍のIB
点に11
温度を与えることを意味する.ここでも
IP1 3.0 X
,
IP2 4.5 X
とした.2.7.2
断熱条件断熱条件では物体遠方と物体内部は
2.7.1
節の等温加熱条件と同様にして与える.物体近 傍の温度
IBは式(2.34)のように物体壁面から
IP離れたIP
点の温度
IPをそのまま
IBに 与える.これはIB
点での法線方向勾配の1
次精度前進差分が0
であることに等しい.ここ で,
IP 3.0 X
とした.IB IP
(2.34)
2.7.3
物体内の熱伝導計算エネルギー方程式のみ式(2.35)のように物体と流体の物性値の違いを考慮した式を用いる ことで,物体の熱伝導を計算する.比熱
C
は流体側では定圧比熱C
pを用いる. u 1 k
t C
(2.35)
無次元変数と無次元数は以下のように定義する.添え字
G
は気相側の物性値を表す.-無次元変数-
X x
L ,
0
U u
u ,
0
t
L u ,
2 0 G
P p
u
,
co l dh o t co l d
,
C G
,
CG
C C
C ,
CG
k k
k
(2.36)
-無次元数-
0 G
R e u L
,
GG
P r
(2.37)
無次元化したエネルギー方程式は式(2.38)のようになる.
1
C
C C
U k
C Pr Re
(2.38)
k
c
は式(3.39)のように離散化した.
,,
1, , 1, , , 1, , 1,
, 1 , , 1 , , , 1 , , 1
2 2
2 2
C i j C C
i j
C i j C i j i j i j C i j C i j i j i j
C i j C i j i j i j C i j C i j i j i j
k k k
X X Y Y
k k k k
X X
X
k k k k
Y Y
Y
(2.39)
物性値を物体と流体で区別した場合,格子形状に依存した結果になる.そこで本研究では物
12
体壁面に物体と流体の遷移領域を作り任意形状を再現した.遷移領域を持つ
Heaviside
関数H e
[19]を用いて各物性値を式(3.40)から式(3.42)のように計算した.添え字S
は物体側の物性 値を表し,添え字G
は気相側を表す.
G S G
He
(2.40)
G S G
C C C C He (2.41)
G S G
k k k k He (2.42)
H e
は距離関数
を用いて式(2.43)のように表す. は遷移領域の厚さであり, 1 . 5 X
とした.
X 1 . 0
のときH e
の形状はFig.2-5
のようになる.
1
1 1
1 s i n
2
0 H e
(2.43)
Fig. 2-5 遷移領域をもつ Heaviside
関数式(2.40),(2.41),(2.42)の両辺をそれぞれ
G,C
G,k
Gで割ることで無次元変数
C,C
C,k
Cは式(2.44)から式(2.46)のように表すことができる.ここで,
,C
,k
はそれぞれ流体を 基準とした物体と流体の密度比,比熱比,熱伝導率比である.
1 1
C G
H e
(2.44)
1 1
C G
C C C H e
C (2.45)
1 1
C G
k k k H e
k (2.46)
S G
, SG
C C
C
, SG
k k
k (2.47)
13
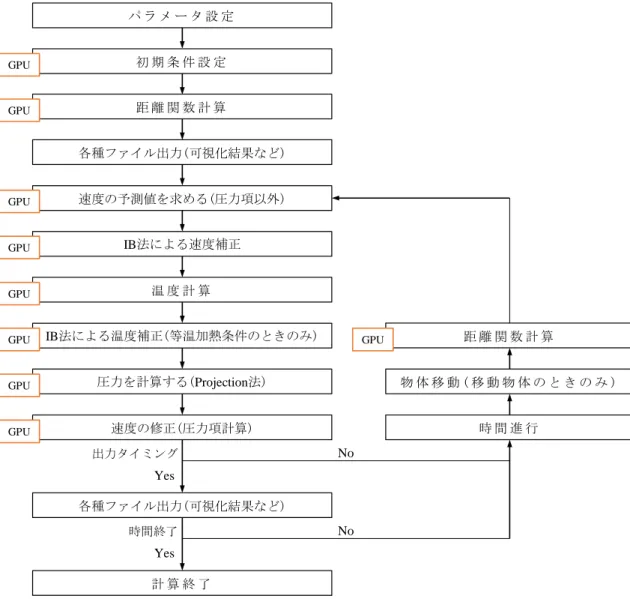
2.8
計算フロー計算フローを
Fig.2-6
に示す.本研究ではGPU
による並列計算を行った.GPUを用いて 計算した処理は左に「GPU」と表記した.本研究ではProjection
法[20]を用いたため,Navier-Stokes
方程式によって速度の予測値を計算する際,圧力項を省いて計算し,圧力修正を行った上で圧力項を足す.圧力修正の反復法は並列計算を行う際に隣接点の値のステップが混 同することを避けるために
Red & Black SOR
法[21]を用いた.Fig. 2-6 計算フロー
初 期 条 件 設 定パ ラ メ ー タ 設 定
各種ファイル出力(可視化結果など)
速度の予測値を求める(圧力項以外)
IB法による速度補正
温 度 計 算
IB法による温度補正(等温加熱条件のときのみ)
圧力を計算する(Projection法)
速度の修正(圧力項計算)
物 体 移 動 ( 移 動 物 体 の と き の み )
時 間 進 行
各種ファイル出力(可視化結果など)
計 算 終 了 出力タイミング
時間終了 Yes
Yes
No
No GPU
GPU
GPU
GPU
GPU
GPU
GPU
距 離 関 数 計 算 距 離 関 数 計 算
GPU
GPU
14
第
3
章計算の妥当性検証
3.1
平板境界層流れ(等温加熱条件)3.1.1 計算モデル
IB
法の精度の確認ために壁面境界で等温加熱条件を与えた平板境界層流れを計算し,定 量的に評価した.格子に対する平板の角度 0
,1 5
,3 0
,4 5
の4
つ計算し,平板に 平行な一様流を与える.また,無次元格子幅を X 1.0 10
2(代表長さに100
格子),5.0 10
3X
(代表長さに200
格子), 2.5 10
3(代表長さに400
格子), 1.25 10
3(代 表長さに800
格子)の4
つ計算した.Fig.3-1の(a)と(b)に示すように滑りなし条件と等温加 熱条件を与えた平板を長さ3L
用意し,滑り条件と断熱条件を与えた平板をその前に長さL
用意した.Navier-Stokes
方程式をもとに平板境界層流れを計算する際,滑りなし条件を与え た先端位置が特異点になり,そこから圧力勾配が発生する.この圧力勾配を解くために特異 点のまわりに空間を作る必要がある.そのため,流れに影響が出ないように滑り条件と断熱 条件を与えた平板を特異点の前に置いた. 0
のとき法線方向の計算領域は平板からL
だけ用意し,平板の高さd 0 . 1 L
とする.格子に平行でない平板の計算において,Fig.3-1
の(b)に示すように,少なくとも 0
の計算空間が含まれるように, 15
,3 0
,4 5
にお け る 計 算 領 域 の
x
方 向 長 さL
xとy
方 向 長 さL
yを そ れ ぞれ L
x, L
y 4.3 , 2.2 L L
, 4. 1 , 3. 0 L L
, 4.2 , 4.2 L L
とした.接線方向座標s
と法線方向座標n
の原点は滑りなし条件と等温加熱条件を与えた平板の先端とする.境界条件は式(3.1)から式(3.4)の通りである.流 入面で平板に平行な一様流を与え,流出面では壁面接線方向勾配または壁面法線方向勾配 が
0
になるように設定した.圧力は全て反射条件とした.式(3.2)と式(3.3)の離散化と式展開 については付録C
で述べる.左面:
u u
incos
,v u
insin
,
cold (物体外部)0
u
,
hot (物体内部)(3.1)
右面:u 0
s
,0
s
(3.2)
上面:
u 0 n
,0
n
(3.3)
下面:
u u
incos
,v u
insin
,
cold (物体外部)0
u
,
hot (物体内部)(3.4)
代表速度u
0 u
inとする.各パラメータをTable 3-1
に示す.ここで,密度などの物性値は温15
度依存しないと仮定し,浮力項は無視するものとする.
Table 3- 1 計算パラメータ
無次元格子幅
X 1.0 10
2,5.0 10
3,2.5 10
3,1.25 10
3 無次元時間刻み 1.0 10
4Reynolds
数1.0 10
4Prandtl
数0 . 7
定量的な評価として,定常状態まで計算し,Fig.3-1に赤の点線で示した
s L
の位置での無 次元接線方向速度U
Sと無次元法線方向速度U
N,無次元温度
の分布と壁面上の U
S N
と局所ヌセルト数N u
を用いた.本計算との比較にBlasius
方程式を4
次精度のRunge-Kutta
法によって解いたものを用いた.この解法の詳細については付録D
で述べる.また,U
SN
とN u
の求め方については付録E
で述べる.(a)
格子に平行な平板(ψ = 0 °
)(b) 格子に平行でない平板
Fig. 3- 1 計算モデル(平板境界層流れ)
Slip wall Thermal insulation
No slip wall Isothermal heating
L 2L
u
inObservation line
ind n s
1.1 L
L
Slipwall Thermalinsulation
Noslipwall Isothermalheating
L
2 L
Observation line
L
L
n s
u
in
inL
xy
L
16
3.1.2 計算結果
Fig.3-1
の赤点線部のU
S,U
N,
の分布をFig3-2
からFig.3-4
に示す.比較のためにBlasius
方程式を