1.は じ め に
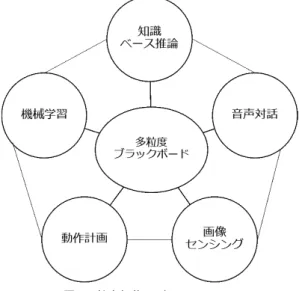
現在,知識ベース推論,音声対話,画像センシング, 動作計画,機械学習の統合知能アプリケーションをエン ドユーザが容易にデザイン・開発できるプラットフォー ム PRINTEPS(PRactical INTElligent aPplicationS) の研究開発 [山口 15],およびロボット喫茶店と教諭ロ ボット連携授業の適用実践を進めている. PRINTESPの研究意義としては,プロダクト的には, 機械学習や知識ベース推論システムに限定された,特定 知能アプリケーションでは,現場での利用(サービス の)観点からは不十分であるので,知識ベース推論,音 声対話,画像センシング,動作計画,機械学習の要素知 能を組み合わせた統合知能アプリケーションの開発にあ る(図 1).また,プラットフォーム的には,開発者だ けではなく,エンドユーザが設計段階から参加でき,あ まり複雑でない統合知能アプリケーションならば,エン ドユーザだけで対応できるツールの開発にある. こうして,最終的には,PRINTEPS は,AI をどのよ うにデザインして利用すれば,さまざまなフィールドで 役に立つのかという知見である「AI 利用知」が蓄積さ れ利用可能となる,「みんなの AI」プラットフォームに 進化できるものと考えている.以下,PRINTEPS の設 計思想,アーキテクチャ,二つの利用実践例について述 べる.
2.PRINTEPS の設計思想
2・1 研 究 背 景 人工知能・知能ロボットアプリケーションの研究で は,記号概念レベルの情報と物理信号レベルの情報を汎 用的に統合する方法が,長年,重要な研究課題になって いる.例えば,ブレーメン大学(独)で推進されている KnowRobプロジェクト [Tenorth 13] では,オントロジー 記述言語 OWL-DL により行動オントロジーが記述され, Prologにより行動計画が実行され,物理信号を処理する 各種プログラムと連携されている.IROS 国際会議では, 2010年より,ロボット分野に特化した DSL(Domain-Specifi c Language,ドメイン特化言語)のワークショッ プが開催され,開発者ではなく,ユーザがロボットを操 作できることを目指している.しかしながら,これらの 研究は,主に,ロボットの自律的動作である動作知能を 対象にしており,本研究では,記号から信号までの複数統合知能アプリケーション開発プラット
フォーム PRINTEPS
PRINTEPS: A User-centric Platform to Develop Integrated Intelligent
Applications
山口 高平
慶應義塾大学Takahira Yamaguchi Keio University.
[email protected], http://www.yamaguti.comp.ae.keio.ac.jp/
森田 武史
(同 上)Takeshi Morita [email protected]
Keywords:
integrated intelligence, knowledge-based reasoning, speech dialog, image sensing, motion planning, integrated intelligence, user-centric platform.「人と調和して協働する知的情報処理」
の知能を連携して,総合的な人工知能・知能ロボットア プリケーションの開発を目指している. 2・2 記号と信号の統合における課題 [森田 15] で提案したアーキテクチャでは,セマン ティック Web サービスの一種である OWL-S*1を基礎 として,最小機能であるモジュールを Web サービスと して実装することを想定していた.しかしながら,表 1 に示すように,本研究が対象とする総合知能アプリケー ションでは,要素知能モジュールごとに入出力データ構 造,および処理に必要な時間スケールが異なっている. 入出力データ構造をセマンティック Web 標準の RDF*2 形式で統一すれば,既存の知識ベース推論以外のライブ ラリの再利用や新規開発が困難になることがわかってき た.また,Web サービスは,知識ベース推論処理のよう に一定時間(数秒程度)で処理が行えればよい場合は有 用であるが,準リアルタイム(音声対話,感情処理)や リアルタイム処理(画像センシング,動作)のように, 数十∼数百ミリ秒単位の処理が必要となれば,現場では ネットワーク遅延などの問題があり,Web サービスは利 用できないという問題が明らかになってきた.このよう に,記号レベルの枠組みを信号レベルの処理に適応させ て,統合知能アプリケーションを開発するアプローチで は,さまざまな問題が出てくることがしだいに明らかに なってきた. 2・3 PRINTEPS における ROS の利用 ROS [Quigley 09]は,オープンソースロボティクス財 団により開発されている,ロボットフレームワークであ り,通信ライブラリやさまざまなツール群を提供してい る.ROS では,Web サービスと同様の同期通信の仕組 みとしてサービスが利用可能であり,さらに,非同期通 信の仕組みとして,トピックも利用可能となっている. ROSは分散システムとして実装されているため,マル チロボットやマルチセンサを容易に扱うことができ,ト ピックを用いることにより,リアルタイムにセンサの値 を取得するなどの処理が可能となっている.また,サー ビスとトピックの入出力データ型は,メッセージとして クラスや構造体のような複合データ型として定義可能で あり,サービスについては,srv ファイルにより,Web
サービスにおける WSDL(Web Service Description Language)*3のように,プログラミング言語非依存の 形で入出力データ仕様が定義可能となっている.現在, ROSの情報をまとめている Wiki には,2 000 以上の ROSのパッケージが公開されており*4,画像,センサ, 動作などに関する多くのライブラリが,ROS のトピッ クやービスの仕様に従って,多くの研究者により開発さ れている. こうして,センシング・動作に関する豊富なライブラ リの再利用性,および,ROS トピックにより,要素知 能の入出力データ構造の差異性,リアルタイム処理問題 を解決できるという判断から,PRINTEPS では,最小 機能であるモジュールとして,ROS におけるサービス およびトピックを利用することとした. 現状の ROS では,パッケージのリストを Wiki で提 供しているのみであり,ユーザが作成したいアプリケー ションに利用可能な ROS サービスやトピックを検索す ることは容易ではない.ユーザは関連論文や個別のパッ ケージのドキュメントやソースコードを読むことによ り,必要な ROS サービスやトピックを検索している. 一方,PRINTEPS では,SOA に基づいて,ワークフロー 形式で,ROS サービスやトピックをモジュールとして 構成したプロセスやサービスを構築し,それらをユーザ 間で共有することにより,ROS サービスやトピックが どのようなアプリケーション,サービス,プロセスで利 用されているかが表示される.この表示機能により,モ ジュールの検索が容易となり,モジュールの再利用性も 高まることが期待できる.
3.PRINTEPS アーキテクチャ
図 2 に,PRINTEPS のアーキテクチャ構成図を示す. PRINTEPSでは,ROS に準拠したモジュールの入出力 仕様および通信プロトコルを実装し,五つのサブシステ *1 https://www.w3.org/Submission/OWL-S/*2 http://www.w3.org/RDF/ *3 https://www.w3.org/TR/wsdl*4 http://www.ros.org/browse/list.php 図 2 PRINTEPS アーキテクチャ 表 1 各知能の入出力データ構造と時間スケール 要素知能 入出力データ構造 時間スケール 知識ベース推論 SWRL, OWL, RDF 一定時間 音声対話 XML 準リアルタイム 画像センシング ROS リアルタイム 動 作 ROS リアルタイム
ム(知識ベース推論,音声対話,画像センシング,動作 計画,機械学習)から構成される.知識ベース推論は, ワークフロー,ビジネスルール,オントロジーを主に参 照し,音声対話は,応答生成用ルール,対話処理用ルー ル,言語理解ルールを参照する.また,人間と機械のマ ルチモーダルなインタラクションにより取得した知識ロ グ,対話ログ,表情・視線・姿勢・動作ログ,環境ログ などは,オンラインおよびオフラインの機械学習の入力 となり,機械学習に利用される.各システム間のデータ は,信号から記号までの多粒度ブラックボードを介して 行われる.PRINTEPS は,AI アプリケーションをユー ザ自身が容易に開発できるように,マルチ知識ベースエ ディタを提供している.以下,多粒度ブラックボードと マルチ知識ベースエディタについて述べる. 3・1 多粒度ブラックボード 多粒度ブラックボードは,PRINTEPS のサブシス テム間でデータを共有するためのデータベースである. PRINTEPSでは,mongodb_store*5を多粒度ブラック ボードとして実装するために用いている.mongodb_ storeは,ROS におけるメッセージを MongoDB に格納 したり,MongoDB から取得することが可能な API 群を 提供している.PRINTEPS では,知識ベース推論,音 声対話,画像センシング,動作計画,機械学習の各モ ジュール間の入出力データとして ROS のメッセージを 用いており,任意の時点で各モジュールの出力結果を多 粒度ブラックボードに格納し,各モジュールが多粒度ブ ラックボードに格納されているメッセージを参照するこ とができる. 3・2 マルチ知識ベースエディタ マルチ知識ベースエディタは,ワークフロー,ルール ベース,オントロジーを統合した,編集可能なエディタ である.現在,マルチ知識ベースエディタにおけるシナ リオエディタ [森田 17] とワークフローエディタ [森田 16b]の実装を進めている. シナリオエディタは,プロセスとモジュールを実行 するアクタの観点に基づいて,プロセスとモジュールの 実行手順を記述可能なエディタであり,ワークフローエ ディタは,サービス,プロセス,モジュールの実行順序 を記述可能なエディタである. マルチ知識ベースエディタでは,シナリオエディタと ワークフローエディタを切り替えて利用することが可能 である. 以下,シナリオエディタとワークフローエディタの詳 細およびマルチ知識ベースエディタとビジネスルール管 理システムとの連携について述べる. § 1 シナリオエディタ シナリオエディタは,プロセスとモジュールを実行す るアクタの観点に基づいて,プロセスとモジュールの実 行手順を記述可能なエディタである.教師ロボット連携 授業アプリケーションにおいて,教師自身が授業をデザ インする際に,アクタごとに分けて,プロセスの実行順 序が記述できたほうが授業全体の流れを理解しやすいこ とから,シナリオエディタの開発を行った. 図 3 に,シナリオエディタのスクリーンショットを示 す.シナリオエディタでは,プロセスおよびモジュール は上から下に向かって実行される.シナリオエディタの 画面は縦方向にレーンで区切られており,各レーンには アクタおよび表示装置を割り当てることができる.レー ンに割り当てることが可能なアクタおよび道具は,アク タおよび表示装置のクラス階層におけるクラスのインス タンスの中から選択する. PRINTEPSにおけるプロセスまたはモジュールには, メタデータとして前述のレーンに割り当てたアクタまた は表示装置(道具)クラスのインスタンスを割り当てる ことができる.アクタまたは道具クラスのインスタンス を割り当てることにより,該当プロセスまたはモジュー ルは,割り当てたインスタンスに対応するレーンのみに 表示されるように制限をかけることができる. 後述するワークフローエディタ上では,プログラム から実行可能なロボットやセンサに関連するプロセスま たはモジュールのみから構成されていたが,シナリオエ ディタでは,教師や生徒のような人間が行うプロセスも 表現可能である.これにより,例えば,授業進行におけ る教師の発言をシナリオエディタ上で表現することがで き,教師はロボットを用いた授業進行において,どの場 面でどのような発言をすべきかを把握しやすくなる. シナリオエディタはワークフローエディタと互換性が あり,ワークフローの別の表現形式とみなすことが可能 である.ユーザは,ワークフローエディタとシナリオエ ディタのいずれかをプロセスごとに選択することができ る. *5 http://wiki.ros.org/mongodb_store 図 3 シナリオエディタのスクリーンショット
§ 2 ワークフローエディタ ワークフローエディタでは,SOA(サービス指向アー キテクチャ)に基づき,知識,対話,画像センシング, 動作,機械学習の各種モジュール群を組み合わせて,ビ ジネスプロセスのワークフローを構成し,ビジネスプロ セスを組み合わせてサービスのワークフローを構成し, サービスのワークフローにより実現されるアプリケー ションを開発事例として保存できる.保存された開発事 例は,開発事例共有システムによりユーザ間で共有され る. ワークフローエディタは,ユーザが SOA に基づいて ワークフローを構築した後に,ワークフローにおける サービスとプロセスおよびプロセスとモジュールの包含 関係,モジュール間の入出力関係などを保存したプロ ジェクトファイル(JSON)を保存可能である.プロジェ クトファイルを入力として,ROS ソースファイル生成プ ログラムにより,ROS 環境で実行可能な ROS ソースファ イル(Python)を生成する.その後,ROS 環境にソース ファイルを配置し,ROS マスタノードと接続して,クラ イアント実行ノードとして実行することが可能となる. 表 2 に,ワークフローエディタの基本構成要素を示す. ワークフローエディタでは,ROSにおけるサービス(サー バとクライアント),トピック(パブリッシャとサブス クライバ),メッセージ(分解と合成)を最小機能であ る,モジュールとして参照可能となっている.モジュー ル間の接続については,ROSのメッセージ型に基づいて, 自動的に接続可能性を判定可能にする.メッセージモ ジュールは複合データ型における特定のフィールドの値 を別のモジュールの入力と接続する際の型変換に用いる ことができ,ROS のメッセージ定義ファイルを登録す ると,自動的に分解と合成モジュールが作成される.メッ セージモジュール(分解)により,複合データ型からそ の各フィールドを,メッセージモジュール(合成)によ り各フィールドから複合データ型への型変換を行うこと ができる. プロセスは,複数のモジュールをまとめるための関 数的な役割をもち,プロセス内には,プロセスおよびモ ジュールを混在して定義することができる.サービスは, 最も粒度の粗い機能であり,プロセスのみから構成され る.サービスに包含されるプロセスはビジネスプロセス として定義する. ワークフローエディタにおける第 1 階層(ルートサー ビス)は,ルート開始,サービスリスト,ルート終了の みから構成される.完成したサービスリストは,開発事 例として,ユーザ間で共有できるようにする.これによ り,どのようなサービス,プロセス,モジュールが開発 事例で利用されているかを容易に検索できる. そのほかに,基本制御部品,グローバルおよびローカ ルなデータ蓄積・参照部品,ユーザが直接入力するため の固定データ部品なども提供する. 自動生成されたソースコード実行時にエラーが発生 した場合には,ROS コンソールにトレースメッセージ を表示するとともに,どのサービスやプロセス内のモ ジュールがエラーの原因であるかを特定することができ るように,ID を割り振る. さらに,各モジュール,プロセス,サービスには,入 出力データ型,説明文,アクタとそのアイコンなどのメ タデータを定義することができ,さまざまな観点から検 索を可能にする. 図 4 に,ワークフローエディタのスクリーンショット を示す. § 3 ビジネスルール管理システムとの連携 ビジネスルール管理システム(BRMS)は,ビジネ スルールエンジンを提供し,ビジネスルールを GUI に より管理可能なシステムである.本研究では,Drools*6 を BRMS として用いる.Drools は,ドメイン特化言語 表 2 ワークフローエディタの基本構成要素 図 4 ワークフローエディタのスクリーンショット *6 https://www.drools.org/
(DSL)を用いて,自然言語に近い形式でビジネスルー ルを定義する機能をもつ. PRINTEPSでは,「ルール発火」モジュールにより, Drools上のルールをワークフローエディタ上から発火さ せることができる.また,ビジネスルールの結論部にお いて,PRINTEPS におけるモジュールやプロセスを実 行することが可能である. 従来の知識ベースシステムとの違いの一つとして,人 の属性などの画像センシング結果をビジネスルールにお ける条件部に利用できる点があげられる.また,ロボッ トのアクション(発話や移動など)をビジネスルールに おける結論部から直接実行することができる. 知識ベース推論が必要な場合には,ROS におけるメッ セージを Resource Description Framework(RDF)形 式に変換し,Semantic Web Rule Language(SWRL) を用いて推論を行う. § 4 オントロジー マルチ知識ベースエディタでは,オントロジーとその インスタンスを利用して,画像センシング結果などを条 件とするビジネスルールを SWRL により定義し,知識 ベース推論を行い,ロボットを制御することができる. また,シナリオエディタにおけるアクタや道具クラスの 定義もオントロジーに基づいて行うことができる. 現状では,BRMS と連携する際には,ルールの条件や 結論の用語の定義として,オントロジーを参照すること ができないが,将来的には,BRMS,オントロジー,ワー クフローをマルチ知識ベースエディタにより,統合する 予定である.
4.ロボット喫茶店
以下,PRINTEPS の最初の応用事例として,ロボッ ト喫茶店の概要について述べる. 4・1 シ ス テ ム 構 成 図 5 に,ロボット喫茶店のシステム構成図を示す.本 研究では,入口,四人掛けのテーブル,二人掛けのテー ブル,調理場,食器棚を図 5 のように配置したロボット 喫茶店環境を研究室内に構築している. 入口に 1 台,各テーブルに 2 台ずつの Kinect v2 を配 置し,人と物の画像センシングを行っている.各テーブ ルには 1 台ずつたまご型マイクアレー*7を配置し,注文 時における音声認識や発話した客の位置の推定を行って いる.調理場には,3 台のペットボトルディスペンサを 配置し,コーヒー,ミルク,オレンジジュース,カフェ オレを用意することができるようにしている.また,ト レイを配置し,最大五つまでカップを置くことができる ようになっている.食器棚には,S サイズ,M サイズ, Lサイズのカップを 2 セット配置している. 接客用ロボットとして Pepper と HSR*8を用いている. Pepperには測域センサ*9を搭載し,走行時に自己位置 を推定できる.HSR はカップなどの運搬にも用いてい る.調理用ロボットとしては Jaco2*10を用いている. Kinect v2は Windows OS が搭載されたノート PC に 接続されており,たまご型マイクアレーは Linux OS が搭載されたノート PC に接続されている.Pepper, Jaco2,HSR もそれぞれ 1 台ずつ Linux OS が搭載され た PC に接続されている.その他に,ROS のマスター 兼多粒度ブラックボードを管理する Linux OS が搭載さ れたノート PC,知識処理(BRMS と RDF ストア)と 人属性認識を行うための Linux OS が搭載されたサーバ を用意しており,計 12 台の PC,Pepper,HSR を ROS の分散ネットワーク環境上に接続している. 4・2 ロボット喫茶店のサービス概要と各要素知能の役割 ロボット喫茶店は,入店時挨拶,座席案内,注文,飲 み物の用意と運搬,会計,見送りのサービス群から構成 される.以下では,各要素知能がどのようにサービス を実現するために用いられているかについて述べる.な お,図 6 に,ロボット喫茶店のワークフロー(図 6(a)), 業務ルール(図 6(b)),ロボットアーム JACO2 による ペットボトルからカップへのソフトドリンク注入(図 6 (c))の様子を示す. § 1 知識ベース推論 知識ベース推論は,ワークフロー,ビジネスルール, オントロジーを用いて,ロボット喫茶店における状態の 図 5 ロボット喫茶店のシステム構成図 *7 http://www.sifi.co.jp/system/modules/pico/ index.php?content¥_id=39 *8 http://www.toyota.co.jp/jpn/tech/partner_ robot/ *9 UST-10LX(北陽電機株式会社),http://www.hokuyo-aut.co.jp/search/single.php?serial=16 *10 http://www.nihonbinary.co.jp/Products/Robot/ KINOVA.html管理やロボットの振舞いを制御する.入店時挨拶と座席 案内においては,画像センシングにより得られた客の人 数や各客の属性情報からグループ推定を実行し,Kinect のセンシング結果とストリーム推論を用いて入店・退店・ 退席・空席を検知している.さらに,ビジネスルールを 用いて,喫茶店オーナの要望を反映したグループごとの 接客を行うことを可能としている.注文時においては, ロボット喫茶店におけるメニュー情報(材料,カロリー, 金額など)をオントロジーとそのインスタンスとして定 義し,音声対話モジュールにその情報を提供し,注文さ れたメニューから必要な食器や調理手順を生成し,動作 計画モジュールを呼び出すなどの処理を行っている.ロ ボット喫茶店における知識ベース推論の詳細について は,[Morita 16a] を参照いただきたい. § 2 音声対話 音声対話では,主に Pepper とたまご型マイクアレー を用いて注文対応を行う.現在,メニューとして,S,M, Lサイズのコーヒー,ミルク,オレンジジュース,カ フェオレを用意しており,客がさまざまな表現方法によ り,これらのメニューを注文した際に,適切に,メニュー 名,サイズ,個数を取得し,ROS のメッセージ型に変 換し,多粒度ブラックボードに保存することを実現して いる.また,知識ベース推論モジュールと連携し,客の グループや属性に応じたメニューの推薦なども可能とし ている.音声対話の詳細については,[西村 17] を参照 いただきたい. § 3 画像センシング 画像センシングでは,主に入口とテーブルのセンシン グを Kinect v2 を用いて行っている.OKAO Vision*11を
用いて人の年齢,性別,表情を推定し,入店客と Kinect v2までの距離データを取得し,知識ベース推論モジュー ルと連携して入店検知を実行し,テーブル上の物品や飲 食行動を認識している.入口のセンシングについては [田中 16] を,テーブルのセンシングについては [番原 16]を,飲食行動の認識については [番原 17] を参照いた だきたい. § 4 動作計画 動作計画では,環境地図を用いた Pepper や HSR の ロボット喫茶店環境内での移動,Jaco2 を用いた飲料準 備,HSR を用いた飲料の配膳などを実行している.入口, 二人掛けテーブル,四人掛けテーブル,調理場,待機場 所など,環境地図上の場所概念をオントロジーとそのイ ンスタンスとして定義し,マルチ知識ベースエディタ上 で,指定の場所に移動できる.また,Jaco2 は,食器棚 の中から指定されたサイズのカップを取得し,注文され たメニューに応じて,ペットボトルディスペンサの前に カップを置き,ディスペンサのレバーをサイズに応じた 時間分引いて,トレイ上の指定の場所にカップを配置す ることを実現している. 図 6 ロボット喫茶店の実証実験の一部 (a)ロボット喫茶店の業務手順を記載したワークフローエディタ,(b)業務ルールマネジメントシステム Drools, (c)ロボットアームによるコップへのジュース注入動作 *11 http://plus-sensing.omron.co.jp/technology/
ロボットの移動には [Yorozu 16] の研究成果を,ロボッ トの走行時における自己位置推定には amcl*12を,環境 地図の作成には gmapping*13を,それぞれ用いている. 以上の各要素知能について,ROS のサービス,パブ リッシャ,サブスクライバとしてモジュールが実装され, マルチ知識ベースエディタ上でワークフローを構築し, ワークフローから自動生成されたプログラムを ROS 環 境上で実行することができるようになっている.
5.教師ロボット連携授業
以下,PRINTEPS の別の応用事例として,教師ロボッ ト連携授業の概要について述べる. 2016年 12 月 14 日と 15 日に,慶應義塾幼稚舎(小 学校)6 年生(4 クラス,1 クラス 36 人,9 班)を対象 として,教師や生徒にロボットや各種センサを連携させ ながら,授業を進行する実践を行った.本授業は,理科 における「人の体のつくりと働き」という単元において, カエルの解剖実験を行った後に,知識の定着をはかるた めに座学で振り返る授業である.本授業実践の詳細につ いては [西本 17] を参照いただきたい. 5・1 授 業 設 計 図 7 に,教師ロボット連携授業における教室内のシ ステム構成を示す.授業を進行するロボットは Pepper または SociBot*14のいずれか 1 台とし,Pepper 版と Socibot版の二つのワークフローを用意した.いずれの 場合においても,カエル解剖振り返りの授業は,1. 授業 導入,2. ロボットと Kinect を用いた振返りクイズ,3. AR技術による臓器を重畳するコンテンツの提示,4. ロ ボットと Kinect を用いた振返りクイズ(続き),5. クイ ズの結果発表,6. タブレット端末を用いた復習クイズ, 7. まとめの流れで行った.以下,各概要について説明す る. 5・2 授 業 導 入 授業導入では,教師が生徒にロボットの紹介をした後, ロボットが自己紹介を行う.その後,授業でクイズを行 うことをロボットに説明させ,ディスプレイには解剖で 使ったカエルの画像を映し,解剖実験を思い出してもら う.ロボットの発話については,ところどころで区切り, 教師がその場の状況に応じて合いの手を入れられるよう にした.図 8 に,教師がシナリオエディタを作成する様 子(図 8(b))と授業シナリオの一部(図 8(a)),机間 巡視する SociBot とその発言(図 8(c)(d)),AR によ る臓器の投影(図 8(e))を示す. 5・3 ロボットと Kinect を用いたクイズ ロボットと Kinect を用いたクイズでは,設計段階で はワークフローエディタにおけるクイズモジュールを用 いて,教師がクイズの内容を入力する. クイズモジュールは,2 択または 3 択クイズを教師 自身が設計できるように用意した PRINTEPS ワークフ ローエディタにおける組込モジュールである.クイズモ ジュールを用いることにより,授業進行の中で,教師が 生徒の理解度をロボットやセンサを用いたクイズにより 確認することが可能となる. 教師は,クイズモジュールにおける入力画面より,ク イズの ID,問題文,選択肢,正解の選択肢番号を入力 することにより,2 択または 3 択クイズを設計できる. 授業の流れの中では,1 班四人で 9 班に分かれて,各 班にノート PC と Kinect v2 を設置し,1 から 3 とマル とバツの回答札を用いて,班別対抗のクイズを行った. クイズモジュールよりクイズの問題文と選択肢(例: 問題文:カエルの皮膚を触って感じられた体温は温か かった? 選択肢:マルまたはバツ)を取得し,ロボッ トとディスプレイを用いてクイズの出題を行う.その後 生徒達に考えてもらう時間を設けるためいったんフロー を止め,各テーブルに置かれているクイズ回答札を生徒 達に立ててもらう.フローを進めると Kinect の画像認 識プログラムが動き,各テーブルの回答を取得する.回 答が出そろうとロボットが正解発表をし,その後ロボッ トもしくは,フローをいったん止めた教師が補足説明を 行う.Kinect を用いたクイズ回答札認識の詳細について は [石川 17] を参照いただきたい. 5・4 AR 技術を用いた臓器を重畳するコンテンツの提示 AR技術を用いた臓器を重畳するコンテンツの提示で は,Kinect の前に人物が立ち,臓器名を音声入力するこ とにより,人物の体に臓器の画像が重畳し,カエルにお ける対応する臓器とともに画面上に提示するモジュール 図 7 教師ロボット連携授業における教室内のシステム構成 *12 http://wiki.ros.org/amcl *13 http://wiki.ros.org/gmapping *14 https://www.engineeredarts.co.uk/socibot/を作成した.詳細は [田中 17] を参照いただきたい. 5・5 結 果 発 表 クイズの結果発表では,多粒度ブラックボードに保存 しておいた各班のクイズ回答結果をすべて取得し,各班 の正解数をディスプレイに表示し,最上位の班をロボッ トが発表した. 5・6 タブレット端末を用いた復習クイズ 授業の最後では,タブレット端末を生徒全員に配布し, オントロジーとルールベースに基づくタブレットアプリ によるクイズを実施した.ここで,オントロジーとして, クイズ構造オントロジーとドメインオントロジーを構築 した.クイズ構造オントロジーは,クイズの設問,選択肢, 正解などを構造化するために定義されたオントロジーで ある.本授業におけるドメインオントロジーは,カエル 解剖オントロジーであり,主に「カエルの身体部位およ び包含関係」,「解剖手順」,「理由」,「関連メディア」か ら構成される.ルールエンジンとして Drools を用いて, ルールベースによりタブレットに提示するクイズやメ ディア(動画または画像)の状態を管理する.クイズ問 題文,設問,解答解説時に提示する関連するメディアな どは,SPARQL クエリによりオントロジーに基づくイ ンスタンスデータから取得できるようにしている.タブ レットクイズの詳細については [西本 17] を参照いただ きたい.
6.お わ り に
現在,ユーザ視点から,PRINTEPS の二つの応用事 例の評価を進めている.ロボット喫茶店では,店員によ る接客サービスと暗黙的に比較されるため,音声認識, 画像センシング,動作の劣化精度が指摘されるが,通常 の喫茶店サービスとは全く異なるロボット喫茶店独自の サービスを提供し,新しいサービス基準を意識させてい く必要があると考えている.また,教師ロボット連携授 業の評価では,一つの授業で,ロボットの発話ボックス が 100 個以上になり,授業進捗を階層的に把握するため の機能の充実が課題であるが,開智望小学校(つくばみ らい市),東京都杉並区立浜田山小学校,市川学園市川 高等学校においても,教師ロボット連携授業を実施する 計画である. 今後,PRINTEPS は「みんなの AI」プラットフォー ムを目指し,さまざまな適用分野での「AI 利用知」が 蓄積されていくようエンドユーザ向けの機能を充実させ ていく予定である. 謝 辞 本研究は,科学技術振興機構(JST)戦略的想像研 究推進事業(CREST)「実践知能アプリケーション 構築フレームワーク PRINTEPS の開発と社会実践」 (JPMJCR14E3)の支援によって実施した.(a)
(b)
(d)
(e)
1回目はどうだった? 余裕?じゃあ2問目いくよ 頭を傾けて、 児童たちに話し かける表情 次の問題は難しいかも しれないよ。先生の話を ちゃんと聞いていたかな? 2回目も簡単だった? すごいねぇ 難しい問題を 出すときの表情 驚きの表情(c)
図 8 教師ロボット連携授業の実証実験の一部. (a)教師用シナリオエディタ,(b)シナリオエディタで TA ロボット開発中の教師,(c)机間巡視(教室内の巡回) をする SociBot,(d)SociBot における発話と表情の対応付け,(e)AR による児童の体に臓器の提示本研究プロジェクトでは,萬 礼応氏,小篠裕子氏,高 橋正樹氏,斎藤英雄氏(以上,慶應義塾大学),中野有 紀子氏(成蹊大学),西村良太氏(前 慶應義塾大学,現 徳島大学)から協力を得ている.また,PRINTEPS マ ルチ知識ベースエディタの実装には,ノースグリッド社 に協力いただいた.ここに記して感謝する.
◇ 参 考 文 献 ◇
[番原 16] 番原常公,中山祐介,齋藤俊太,斎藤英雄:実践知能 アプリケーション開発プラットフォーム PRINTEPS のための RGB-Dカメラによるテーブルトップ作業空間の状況認識,第 78回全国大会講演論文集,pp. 231-232(2016) [番原 17] 番原常公,八馬 遼,家永直人,小篠裕子,斎藤英雄:画 像による物体検出を用いた飲食行動認識の検討,信学技報,Vol. 116, No. 461, pp. 95-98(2017) [石川 17] 石川 礼,小篠裕子,斎藤英雄:PRINTEPS における教 師ロボット連携授業のためのクイズモジュール,信学技報,Vol. 116, No. 462, pp. 69-74(2017) [森田 15] 森田武史,山口高平:PRINTEPS アーキテクチャの 構 成と実践,人工知能学会全国大会(第 29 回)論文集,1I4-1(2015) [Morita 16a] Morita, T., Sugawara, Y., Nishimura, R. and Yamaguchi, T.: Integrating Symbols and Signals Basedon Stream Reasoning and ROS, pp. 251-260, Springer
International Publishing, Cham(2016)
[森田 16b] 森田武史,西村良太,山口高平:ROS に基づく総 合知 能アプリケーション開発プラットフォーム PRINTEPS のアー キテクチャ,人工知能学会全国大会(第 30 回)論文集,4C4-1 (2016) [森田 17] 森田武史,萬 礼応,小篠裕子,西村良太,高橋正樹,中 野有紀子,斎藤英雄,山口高平:統合知能アプリケーション開 発プラットフォーム PRINTEPS とその応用事例,第 31 回人工 知能学会全国大会,4G1-OS-14a-2(2017) [西本 17] 西本智浩,赤柴駿介,高橋尚也,森田武史,柊原礼二, 桑山美冴,山口高平:PRINTEPS による教師ロボット連携授業 アプリの開発,信学技報,Vol. 116, No. 462, pp. 63-68(2017) [西村 17] 西村良太,眞鍋麟太郎,中野有紀子:ROS アーキテクチャ に基づき情報統合・共有を行う音声対話システム の開発,第 79 回人工知能学会言語・音声理解と対話処理研究会(SIG-SLUD), Vol. B506, No. 15, pp. 79-84(2017)
[Quigley 09] Quigley, M., Conley, K., Gerkey, B. P., Faust, J., Foote, T., Leibs, J., Wheeler, R. and Ng, A. Y.: ROS: An open-source robot operating system, ICRA Workshop on Open
Source Software(2009) [田中 16] 田中康浩,中山祐介,齋藤俊太,斎藤英雄:実践知能 アプリケーション開発プラットフォーム PRINTEPS のための RGB-Dカメラによる来場者検出と属性判定,情報処理学会第 78回全国大会講演論文集,pp. 233-234(2016) [田中 17] 田中康浩,小篠裕子,斎藤英雄:PRINTEPS における 教師ロボット連携授業のための AR モジュール,信学技報,Vol. 116, No. 462, pp. 75-80(2017)
[Tenorth 13] Tenorth, M. and Beetz, M.: KnowRob: A knowledge processing infrastructure for cognition- enabled robots, Int. J.
Robotics Research, Vol. 32, No. 5, pp. 566-590(2013)
[山口 15] 山口高平,中野有紀子,斎藤英雄,森田武史,青木義満, 萩原将文,斎藤俊太:知能共進化のための実践知能アプリケー ションプラットフォーム PRINTEPS,人工知能学会全国大会(第 29回)論文集,1I4-2(2015)
[Yorozu 16] Yorozu, A. and Takahashi, M.: Obstacle avoidance with translational and efficient rotational motion control considering movable gaps and footprint for autonomous mobile robot, Int. J. Control, Automation and Systems, Vol. 14, No. 5, pp. 1352-1364(2016) 2017年 7 月 11 日 受理