日本機械学会論文集(C 編) 原著論文 No.2013-JCT-0393
摩擦駆動車輪を有する情報収集ロボットの開発
*内田 康之
*1,深沢 恒平
*2,竹島 正博
*1Development of Information Gathering Robot with Wheel Mechanism Driven by Friction
Yasuyuki UCHIDA
*1, Kouhei FUKASAWA and Masahiro TAKESHIMA
*1 Nihon Univ. College of Industrial Technology
Izumicho 1-2-1, Narashino City, Chiba, 275-8575 Japan
We have been researching on an information gathering robot. Before a rescue team enters to save the people who encountered the damage in a disaster and the terrorism spot safely, this robot searches for a safe course for the rescue team, dangerous equipment and the victim. We decided a concept to make a small and light weight to have can potable and enter narrow space, and designed robot to comply with it. The total height of robot that makes it for trial purposes is small with 0.12[m]. Moreover, mass is light with 0.6[kg]. We let you run this robot which you produced experimentally on a road surface of various situation including gravel and step and RSF. We have grasped maneuver performance on this robot by comparing with the theoretical value computed beforehand. Devised to improve the traveling performance and a coupling of multiple robots was also confirmed that performance is better to go the step by.
Key Words : Robot, Friction Drive, Information Gathering, Rescue, Maneuver Performance
1. 緒 言 原発事故や大規模地震(1)(2)などが発生した現場では,特殊な訓練を受けた救助隊でも,二次,三次災害 が起こる危険性を考えると,直ちに現場に突入することはできない.また,地下鉄サリン事件から約 20 年, 米国で起こった 9.11 同時多発テロから約 10 年が経つが,情勢不安な地域は世界各地にありテロも多発して いる.そこで,災害やテロ現場で被害にあった人々を安全に救出するために,救助隊や警察等が突入する前 に,安全な経路の探索,テロリストや不審物,被害者等の捜索を行う情報収集が重要になってくる.情報収 集活動は広域を対象としたものが望まれるが,福島原発事故での最先端ロボットの活動の状況(3)(4)(5)(6)か らも明らかなように,現場は想定を超えた複雑な状況であり,最先端のロボット技術を使用しても直ちに移 動困難となってしまう.事態発生時に速やかに情報収集を行うためには,救助隊員等との協働作業を前提で 考えなければ対応困難である.これには,隊員等の生命の安全を最大限に確保する必要があり,隊員等のひ とり一人が常に携行して使用でき,前進する際の目前の安全確認に使用できる情報収集機能が必要となる. すなわち,隊員等の周囲数十メートル程度を移動しカメラ等で情報収集するロボットが有用であると考える. そこで,我々は,ロボットの主な開発目標として,情報収集用のカメラを搭載すること,車下等の狭隘な場 所での運用と救助隊員による携行性を考慮し全高 0.12[m]以下に小型化し質量 1[kg]以下に軽量化すること, 情報収集現場での移動の障害となる OA ケーブルや砂利などの 0.03[m]以下の段差の踏破性を有することとし た.本報告では,これらを実現するために行った試作及び実験評価の結果について報告する. *1 正員,日本大学 生産工学部(〒275-8575 千葉県習志野市泉町 1-2-1) *2 学生員,日本大学大学院 生産工学研究科 E-mail: [email protected] * 原稿受付 2013 年 5 月 6 日 79 巻 808 号 (2013-12)
2. 従来の研究 これまで様々な情報収集ロボットが開発されてきたが,近年の傾向としては,装備として隊員の負担にな らない程度の小型・軽量のものが増えつつある.例えば,三菱電機特機システム株式会社と総務省消防庁は, クローラ型の移動ロボットとして FRIGO-M(8)を共同開発した.このロボットは,全長 0.437[m],全幅 0.350[m], 全高 0.152[m],質量約 12[kg]であり,走行速度は約 1.1[m/s]と速く,不整地走破性も高い.次に,iRobot 社(米 国)は,福島原発事故でもある程度の成果をあげた packbot(9)を開発している.これは,軍用ロボットであ り堅牢で安定性が高い.そして,全長 0.989[m],全幅 0.521[m],全高 0.178[m],質量約 11[kg]と大型である ことから,走行速度は約 2.6[m/s]と非常に速く,階段昇降や複雑な地形での走行性能が優れている.また,大 和ハウス工業株式会社と三菱電機特機システム株式会社は,床下点検ロボット moogle(10)を開発し販売を始 めた.これは,全長 0.5[m],全幅 0.3[m],全高 0.24[m],質量約 13[kg]と小型であり,姿勢可変クローラによ り床下の障害物の走破性も高い.これらは,携行に専属の人員一名を要するため,その隊員の個人装備に制 限を与え携行性が良いとは言い難い.最後に,RECON ROBOTICS 社(米国)は,小型・軽量で実用的な RECON SCOUT THROWBOT(11)を開発し,警察等で実用試験を行っている.車輪径 0.076[m],全幅 0.187[m],バランサ ー(尻尾)長 0.102[m],質量約 0.6[kg]であり,走行速度は約 0.3[m/s]である.非常に小型・軽量で構造もシンプ ルであるが,二輪型であるため,建物内にあるケーブルなどの小さな凹凸に弱いなど不整地走破性が低いという 問題がある. 以上の4つのロボットは,災害,テロ,犯罪現場のほか,車下,床下,天井裏など狭隘な空間での情報収集を 目的としているが,これまでに述べた弱点を有している.そこで,我々は例に挙げたロボットの弱点を克服する ために,次に示すデザインコンセプトで情報収集ロボットを開発した. 3. デザインコンセプト 我々が開発したロボットのコンセプトは次のとおりである. (1)小型:爆発物のような不審物は車の下など狭隘な空間に設置されることが多いため,このような狭隘 な空間でも捜索できるようにロボットの全高は,一般的な自動車の最低地上高を考慮した 0.12[m]以下 とする. (2)軽量:救助隊員一人が任務遂行に支障なく携行できる限界質量は約 30[kg]と言われている.実際に救 助隊員が携行する救助機材の質量は 26~27[kg]である.このことから,新たな装備に割ける質量はわ ずか数キログラムである.そこで隊員の負担を極力軽減するためにロボットの質量を 1[kg]以下とする.
(3)機動性:走行速度は,類似の RECON SCOUT THROWBOT の 0.3[m/s]を超えるものとすることで,救 助隊員との協同作業の高速化と操縦性の向上を目指す.また,走行・旋回時の障害となるバランサー (尻尾)を不要とする.これにより,建物内にある OA ケーブルやケーブルカバーなどの 0.02[m]程度 の段差を安定的に走破できるものとし,登坂できる最大傾斜角を道路構造令から 8[deg](14[%])以上 とする.さらに,狭隘な空間での超信地旋回を可能とする. (4)耐衝撃性:人が危険で入れない障害物の奥へ投げ入れる運用,走行中の転倒や滑落に耐えられる構造 とする. (5)拡張性:救助隊は 6 名前後の小隊や班などを活動の最小単位として運用されているが,各隊員が一台ずつ ロボットを携行し必要に応じて情報収集ができるようにするとともに,使用環境の起伏が大きい場合など 一台のロボットでは走行できないと判断した場合は,隊員間で連携しそれら複数台のロボットを連結する ことにより機動性を向上させ,情報収集活動を継続できるようにする.このため,ロボットは,単体走行 と連結走行を構造的に簡単に変更できるモジュール構造とする.そして,連結走行時には OA ケーブ ルのタップ部など 0.03[m]程度の高い段差などの障害を克服できるようにする. 4. 基本モジュールのシステム設計 4・1 基本モジュールの構造 前述の(1)~(5)のコンセプトに基づき設計したロボットの基本モジュールの構造を図 1 に示す.
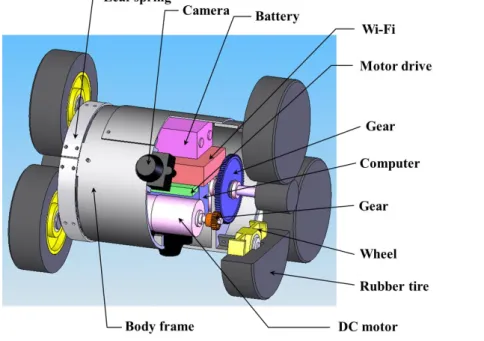
中央の円筒形本体部には,SH2 マイコンを使用した制御装置(TITech SH2 Tiny Controller:(株)ハイボット), 2 軸モータドライバ(Mini 2-Axes Motor drive:(株)ハイボット),9[V] 250[mAh]角型ニッケル水素充電池
(DLG025-H7C:八洲電業(株)),左右独立駆動用の DC モータ(マクソンジャパン(株)),情報収集用の 25 万 画素 1/3 CMOS カラーピンホールカメラ( CP-18PW )を搭載している.本体は,3 次元プリンタで立体的に製 造したことで,部品点数を減らすことができ小型・軽量で高強度な構造を実現した.動力伝達部は,各衝撃を緩 和,分離するために摩擦駆動車輪方式を適用し,走行用の車輪は車軸と本体を板バネで結合した片側 3 輪とした. さらに機動性を考慮し接地する 4 輪での走行とし,旋回方式は左右独立駆動のスキッドステア方式とした.車輪 径は,基本モジュールの全高を構造的に 0.12[m]以下に抑えなければならず,基本モジュールを連結し機動性を向 上させた時には OA ケーブルやケーブルカバーなどの 0.03[m]程度の障害物を踏破できることを目標に,0.06[m] とした. 4・2 摩擦駆動車輪方式の設計 考案した摩擦駆動車輪方式の概略図を図 2 に示す.本体部の保護と任意姿勢での走行を可能とするため,本 体部を包むように片側 3 輪、計 6 輪を配置した.モータからの動力は,内輪から摩擦力を介して,その外周に 等間隔で接触配置した 3 つの外輪に伝達される.内輪と外輪には柔らかいスポンジゴム(材質:EPDM(エチレ ン-プロピレン-ジエンゴム))を使用することで,摩擦により動力を伝達し易くしている.また,外輪は湾曲 させた板バネにより支えられており,ゴムとの効果を併せることで,路面等からの衝撃を緩和,分離し,モータ へ伝達し難くしている.さらに,路面と接地している外輪は,自重により板バネが変形することで,内輪との接 触力が増し,動力の多くがそれらの外輪に効率的に伝達される構造となっている.
Fig. 1 Structure of one module robot
4・3 タイヤ材質選定のための基礎実験 内輪と外輪には前述したとおり EPDM を使用しているが,事前に,衝撃吸収可能なタイヤ材質を選定するため に,期待された EPDM とハネナイトの 2 種類について,以下に示す基礎実験を行った.本研究で使用した EPDM は㈱イノアックコーポレーション製 E-4088 であり,スポンジのような緩衝性を持ち,軽量で強靭性にも優れてお り,硬度 6,引張強度 0.49[MPa],伸び 220[%],圧縮永久歪 29.7[%],密度 0.11[g/cm3 ]等の機械的特性を有してい る.ハネナイトは内外ゴム㈱製 GP-60L であり,衝撃や振動吸収に優れているゴムで,外力を受けてもほとんど 反発せずエネルギを吸収する特性を持っており,硬度 57,引張強度 8.3[Mpa],伸び 810[%],圧縮永久歪 16[%], 密度 1.28[g/cm3 ]等の機械的特性を有している.基礎実験で使用した外輪は,直径 0.060[m]で幅 0.020[m]のものと し,内輪は、直径が設計上の基準値 0.020[m]よりわずかに大きい 0.022[m]で幅 0.020[m]のものとした.これ により,内輪と外輪が確実に接触するように配慮した. (1)落下衝撃確認実験 それぞれの材質のタイヤをロボットに取り付け,一定の高さから落下させた時の様子を観察した.EPDM の場合は,図 3(a)に示すように,特性どおり落下させた高さに応じてバウンドを繰り返す様子が見られた. これに対してハネナイトの場合は,図 3(b)に示すように,低い高さでは特性どおり衝撃を吸収していたが, ある程度の高さを超えるとバウンドしていた. (2)回転滑り確認実験 内輪を駆動するための DC モータに 3,6,9[V]の電圧を与え,内輪を低速,中速,高速でそれぞれ空転さ せ,内輪が一定数回転した時の外輪の回転数を測定し,滑りなく動力を伝達できているかを確認した.その 時の様子を図 4 に,内輪が 10 回転した時の外輪の回転数の計測結果を表 1 に示す.なお,内輪が 10 回転し
Fig .3 Drop impact test
Fig. 4 Slip speed test
Table 1 Results of rotation value on the slip speed test (b) Case of EPDM (a) Case of HANENAITO
Material
Volt
[V]
Rotation value of outside tire
Blue
line
Red
line
White
line
Theoretical
value
EPDM
3
3.56
3.58
3.63
3.67
6
3.53
3.56
3.60
9
3.57
3.60
3.63
HANENAITO
3
3.64
3.67
3.72
6
3.67
3.67
3.69
9
3.72
3.75
3.75
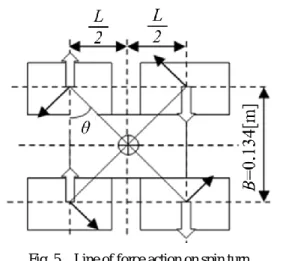
た時の外輪の回転数の理論値は,内輪径と外輪径の比から 3.67(=0.022[m]×π×10/0.060[m])と考えられる. EPDM の場合の外輪の回転数は,どの電圧のときも理論値の 3.67 を下回っているが,内輪径を設計上の基準値 0.020[m]と仮定し算出した理論値の 3.33 よりも上回っていた.これは,EPDM が柔らかいために適度に圧縮され, 回転中に内輪径が 0.020~0.022[m]の範囲で変化したことによるものである.また,図 4 に示すタイヤ表面の目印 の回転中の位置関係から,目立った滑りが無かったことを目視で確認した.これに対して,ハネナイトの場合 は特に高速回転時に理論値を上回る結果となった.ハネナイトは EPDM に比較して硬度が高いことから圧縮 されることなく,内輪径が設計上の基準値より大きいことに起因して外輪が外側に押し出され,接触不良に よる滑りが生じたと考えられる. 前述した(1),(2)の実験結果より,衝撃を吸収する点ではハネナイトが有効だが,ハネナイトよりも遥 かに軽量で,緩衝性により衝撃を緩和でき動力伝達を滑りなく行える EPDM をタイヤの材質として選定した. 4・4 駆動力の設計 走行時に必要なトルクの見積もりを,起動時,信地旋回時,超信地旋回時,登坂走行時で行い,最大値で あった超信地旋回時の結果からモータの選定を行った.超信地旋回時の力の作用の様子を図 5 に示し,各記 号の説明と使用した値を付記する. 外輪径:D=0.06[m] 内輪径:d=0.02[m], 接地長:L=(D+d)cos30[deg]=0.07[m] 車輪間距離:B=0.134[m] ロボット全高:H=0.12[m] ロボット質量:W=0.6[kg] 速度:V=0.42[m] 重力加速度:g=9.80665[m/s2 ] 静止摩擦係数:μ静止=1.0 加速時間:t=0.5[s] 各軸周りのトルク:Tm=9.32[mN・m], T(旋回),T(横方向摩擦),T(対横方向摩擦),Tα,Tα′ 起動時のトルクは,内外輪の加速トルク及び摩擦による負荷から Tm=9.32[mN・m]であるが,超信地旋回の 場合,左右の車輪を相反する方向に同じ速度で回転させて図 5 に示すように旋回動作を行うものである.各 車輪は通常走行とは違う方向に動き出すので,通常走行よりも負荷が加わる.よって回転方向へのトルクを それぞれの回転軌道の接線と走行方向のなす角度から換算しその分加味することで超信地旋回時に必要な片 側 2 輪に関するトルクを見積もった. まず,車輪の回転方向に関する各トルクを算出する. T(旋回)=Tm/cosθ=Tm/[L/2×{√(L/2)2+(B/2)2}]=20.3[mN・m] (1) 但し,θ=tan-1 {(L/2)/(B/2)}である. T(横方向摩擦)=μ静止×(L/2)×(W/2)×g=103.0[mN・m] (2) T(対横方向摩擦)={T(横方向摩擦)/(B/2)}×L/2=53.8[mN・m] (3) 次に,慣性モーメントに関するトルクを算出する. ロボットを横長の丸棒と仮定すると,全体の慣性モーメントは J=W×L2 /12 と表すことができるので, Tα=J×ω/t=J×V/{(B/2)×t}=(W×B/6)×V/t=11.2[mN・m] (4)
となり,軸周りに関するトルクは,式(5)のように求められる. Tα′=(Tα/2)×(L/2)/(B/2)=Tα×L/2B=2.93[mN・m] (5) よって,求める超信地旋回時に必要なトルク T(超信地旋回)は,式(6)のようになる. T(超信地旋回)=T(旋回)+T(対横方向摩擦)+Tα′=77.1[mN・m] (6) 選定したモータの最大連続トルクは 5.51[mN・m]で、外輪に伝達されるトルクは,内輪と外輪の表面同士 が接触することで生じる接線方向の摩擦による伝達効率を 60[%]と仮定すると 144[mN・m]となるため,安全 率が約 1.9 となり余裕のある設計となった.仮に,ロボット質量が W=0.9[kg]に増加したとしても,T(超信地旋 回)=103.2[mN・m]であり,安全率を約 1.4 に維持できるため余裕のある設計となっている.なお,ここで用いた 伝達効率は,歯面状態の悪い歯車の値やゴム同士の摩擦係数を参考に仮定したものである. 4・5 試作したロボット 試作したロボットの外観を図 6 に,諸元を表 2 に示す. 4・6 基本モジュールの走行特性把握 図 7 に示した基本モジュールの走行特性のうち,次の4つについて実験的に確認した. (1)直線走行実験:ロボットを一定距離直進させ,ロボットの速度や軌跡のずれを確認した. (2)旋回走行実験:ロボットを信地旋回,超信地旋回,緩旋回させたときの軌跡のずれを確認した. (3)斜面走破実験:先に登坂できる傾斜角を推定し,その傾斜を登坂できるかを確認した. (4)段差踏破実験:先に踏破できる段差高さを推定しその高さを踏破できるかを確認した. 各実験で使用した路面の種類と速度条件は次の通りである. ・路面:平地,砂利道(図 7),RSF(図 8) ・速度:低速(0.16[m/s]),中速(0.34[m/s]),高速(0.43[m/s]) Fig. 6 Appearance of one module robot
Table 2 Specification of one module robot
Fig .7 On gravel road Fig. 8 On random step field
Length
Width
Height
Weight
Velocity
0.130[m]
0.154[m]
0.120[m]
0.6[kg]
0.42[m/s]
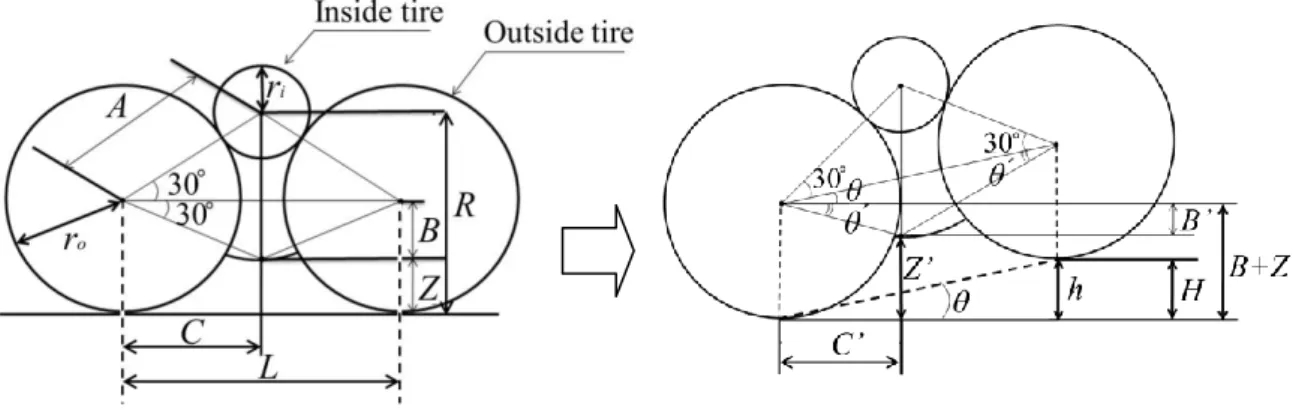
実験(1)では,初期の性能を発揮できた.実験(2)では,旋回中心が最大で 0.03[m]程度のズレを生じること が確認された.これは,取り付け誤差などにより生じた構造上の歪みが原因と考えられる.実験(3)では,傾 斜角 28[deg]まで登坂することができた.実験(4)については,実施した 4 つの実験の中でも最も現象が複雑で 難易度が高いため,次項に走行速度を中速とした場合の実験結果について詳述する. 4・7 基本モジュールの段差踏破実験 ここでは,踏破できる段差高さの理論値の算出方法と,段差踏破実験の結果について記述する. (1)理論値算出 段差踏破実験の段差高さの変更範囲を規定するために,踏破できる段差高さをロボット本体と段差との接 触高さから算出した.ロボットが段差を踏破するときの概略図を図 9 に示し,各記号の説明と使用した値を 付記する. 外輪半径+内輪半径:A=0.04[m] ロボット本体半径:R=0.04[m] 外輪間距離:L=0.04√3[m] R の半分:B=0.02[m] L の半分:C=0.02√3[m] 平坦時のロボット本体と路面との隙間:Z=0.01[m] 最大乗り越え段差高さ:H ロボットが段差を越えるとき,ロボットは θ[deg]傾く.このとき「ロボット本体と路面との隙間:Z’」と 「外輪の高さ:h 」が同じ値となるような「傾斜角:θ[deg]」を求めれば,「最大乗り越え段差高さ:H」が 求まる. Z’と h は式(7),式(8)のように表すことができ,Z’が h よりも大きければ踏破可能である.つまり,式 (9)を満たす θ[deg]の最大値を式(7)に当てはめることで最大乗り越え段差高さを求めることができる. H=(h=)Lsinθ (7) Z’=(B+Z)-[{Acos(30[deg]+θ)}×tan(30[deg]-θ/2)] (8) Z’/ H > 1 (9) これよりθ=15[deg]のときに最大乗り越え段差高さ:H=0.018[m]となることがわかる. (2)実験結果 最大乗り越え段差高さを 0.018[m]としたので,段差高さを 0.01[m]の初期値から 0.005[m]間隔で増加させ段 差踏破実験を行った.このとき,基本モジュールが目標とする段差高さ 0.02[m]を踏破できなかった場合に限
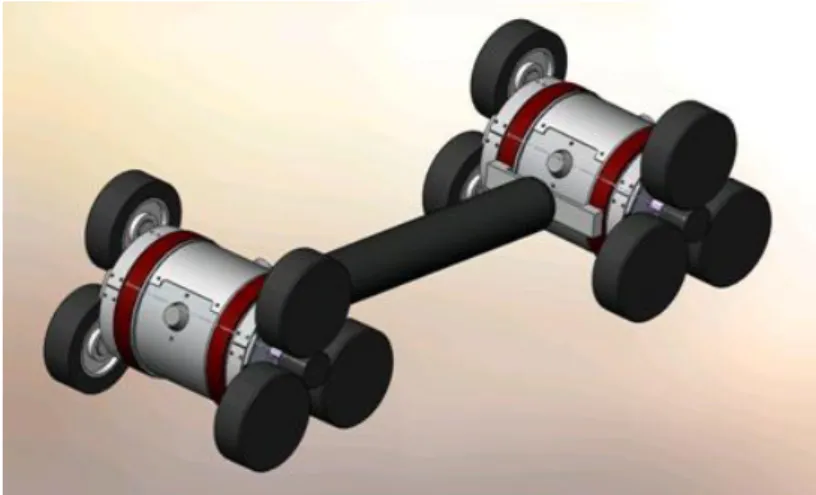
り,理論値にあたる 0.018[m]で実験を行うこととした. 結果として,図 10 に示すように,上記の計算で求めた理論値よりも高い段差高さ 0.02[m]においても踏破 できた.これは,EPDM のスポンジ効果とロボット本体が接触しても越えるに十分なトルクを出力できたこ とによるものと考えられる.次に,限界性能を把握するために,さらに段差高さを増加させ実験を継続した. 段差高さ 0.025[m]では,前輪は段差を越えようとしていたが,図 11 に示すように外輪を支持する板バネを固 定するねじの頭が段差の角と接触してしまい,乗り越えを妨げるような状態が生じ踏破できなかった.将来 的に,基本モジュールでの段差踏破性能を向上させていくためには,ねじの頭が路面と接触しない板バネの 支持方法の設計改善が必要であることがわかった. 5. 連結機構のシステム設計 5・1 連結機構の構造 ここでは,先に述べたデザインコンセプトのうち「3.(5)」を以下のように具体化し,これらを考慮し設 計した連結機構について記述する. (1)段差などの踏破性能を向上させる. (2)ロボット本体の円周方向の回転が自在で,ねじれや姿勢変化を妨げない. (3)連結機構を付けたロボット単体の質量が 1[kg]以下となる. (4)連結機構の着脱が容易である. 設計した連結機構を用い 2 台のロボットを連結した様子を図 12 に示す.この連結機構を用いることによる 効果は,次のとおりである.ロボット本体がドライベアリングを内蔵したリング状の部品で支持されている ことで,段差などに衝突した場合,ロボット本体が円周方向に自在に回転し,後ろのロボットが押し上げる ことで,段差を乗り越えることができる.ロボット同士を連結させる部品はスポンジ棒を採用しており,適 度な硬度により段差踏破時には二台目の動力を一台目に伝達し,ねじれや姿勢変化にも柔軟に対応できるた め,姿勢変化を妨げることなく走行できる.また,この連結機構装着時のロボットの質量は 0.68[kg]と,1[kg] 以下に抑えることができる.
Fig .10 Climbing a 0.02[m] step in height Fig .11 Contact between the robot body and a 0.025[m] step in height
Fig. 12 Structure of a connection mechanism
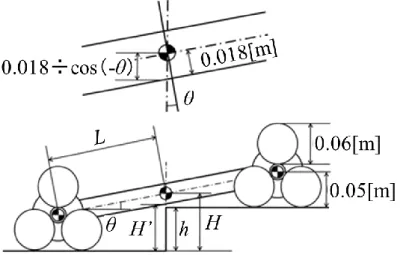
5・2 2 台連結時の段差踏破実験 (1)理論値算出 ここでは,考案した連結機構によって踏破できる段差高さの理論値の算出方法と段差踏破実験結果につい て記述する.図 13 は,連結時の段差乗り越えを示す概略図である.なお,ここで求める理論値は,段差踏破 実験の段差高さの変更範囲を規定するために算出した. 連結時の重心は連結部の中心にあり,先頭のロボットが段差を越えた時,重心位置が段差の位置を越える ことができれば,先頭が後ろのロボットを引き上げることで段差を乗り越えられる.連結棒を剛体とし,「連 結部長さ:L」を変えた場合の「重心位置高さ:H」から「重心位置の剛体底部の高さ:H’」を算出し,「最 大乗り越え段差高さ:h」と比較することで乗り越え段差高さの最大値を求めた. H’/h=Lcosθ-{0.018×cos(-θ)}/2Lsinθ>1 (10) 市販品の連結棒の最大長さは 0.22[m]であり,この時に式(10)を満たす θ の値から,最大乗り越え段差高 さ:h=0.064[m]となることがわかる.なお,L を小さくした際についても検討したが L の値は大きいほど h が大きくなるためここでは省略する. (2)段差踏破時の動作について ここでは連結したロボットがどのように段差を乗り越えるのかについて記述する.図 14 は段差を乗り越え るときの想定図である.先頭のロボットが段差を越えるとき,段差と接触している前輪は固定されるが,内 輪の動力伝達と後輪の押し出す力により先頭のロボット自体が回転する(図 14(a)).ロボットが単体の場 合は踏破するには力が足りないためその場で回転し続けるが,後方のロボットが押し出す力が加わるため, 先頭のロボットは段差を乗り越えることができる(図 14(b)).そして後方のロボットは先と同じように, 先頭のロボットが引っ張り上げようとする力が加わるため段差を乗り越えることができる(図 14(c)).こ こで,緑色の矢印は先頭のロボットが内輪の動力伝達により押し上げられる回転が生じることを示し、橙色の矢 印は先頭のロボットの外輪の推力と先頭のロボットが引く力を示し、青色の矢印は後方のロボットの外輪の推力 と後方のロボットが押す力を示す。 (3)実験結果 算出した理論値を踏破できるか実験を行った.実験方法としては,基本モジュールでは 0.02[m]まで踏破可 能であったので,段差高さを 0.02[m]の初期値から 0.005[m]間隔で目標の段差高さ 0.03[m]まで増加させ実験 を行った.次に,限界性能を把握するため,算出した理論値である最大乗り越え段差高さを超える 0.065[m] まで増加させ実験を行った. 結果として,目標とする段差高さ 0.03[m]は踏破できなかったが,図 15 に示すように段差高さ 0.025[m]ま では踏破できた.これにより,基本モジュールでは踏破不可能であった段差高さを複数台連結することで踏 破できることを確認できた.次に,今後の課題と発展性を把握するために,段差高さ 0.03[m]以上での実験結
果について考察する.このような段差は,先頭のロボットにとっては壁面であり鉛直上方への上昇推力が効 果的に発揮される必要がある.しかし,自身の推力のみでは前輪が段差に乗り上げるのみで留まり,後輪を 引き上げるに至らなかった.この後輪を引き上げる効果は,後方のロボットの押す力が効果的に作用するこ とで解決されるが,後方のロボットの推力不足により発揮できなかった.そこで,後方のロボットの推力を 増加させるためには、内輪と外輪間の動力伝達効率を高める必要があると考えた.その一つの方法として後 方のロボットの内輪径を 0.022[m]から 0.03[m]に拡大した.そして,同様の実験を試みたところ,十分な推力 が発生し,段差高さ 0.04[m]まで踏破できることを確認した.これより,後方のロボットの押す力を安定的に 発生させること,平坦な路面上で安定的に推力を発生できるロボットが 2 台以上在ることが,段差踏破性能 の向上には重要であることがわかった.今回の実験ではロボットを 2 台までしか用意できなかったが,今後 の研究においてロボットを 3 台以上連結すれば,段差踏破中のロボット 1 台の推力不足を他の 2 台以上のロ ボットの推力が補うため,段差踏破性能を向上させることができると考えている. (a) (b) (c) 6. 結 言 情報収集ロボットの基本モジュールの動力伝達部に用いるため,路面等からの衝撃を緩和,分離できる摩 擦駆動車輪方式を提案した.試作した基本モジュールは,車下などの狭隘空間での作業を可能とし,救助隊 員が携行する際の負担を軽減するために,全長 0.13[m],全幅 0.154[m],全高 0.12[m]と小型化,質量 0.6[kg] と軽量化を図ることができた.試作した基本モジュールは,摩擦駆動車輪による 4 輪駆動により高い不整地 走破性を有し,高さ 0.02[m]の段差の踏破,傾斜角 28[deg]以下の斜面登坂,信地旋回,超信地旋回等が可能
Fig .15 Climbing a 0.025[m] step in height Fig .14 Plan changing posture to climb a step
であることを走行実験により確認した.また,試作した連結機構により 2 台の基本モジュールを連結するこ とで,基本モジュール単体では不可能であった高さ 0.03[m]の段差を踏破することができ,今後,連結台数を 増やすことや摩擦駆動の伝達効率を上げることにより,踏破可能な段差高さを向上できることも確認した. 今後は,実験より得られた知見に基づき,連結台数を 3 台以上とした場合の走行特性や連結棒の材質を変更 した場合の走行特性を実験的に確認し,性能向上に努めていく予定である. 8. 謝 辞 三次元プリンタを用いたロボット筐体の立体造形において,丸紅情報システムズ株式会社殿,アルテック 株式会社殿,株式会社リアルビズ殿に,多大なご支援をいただきましたことを深く感謝いたします. 文 献 (1) 文部科学省,大都市大震災軽減化特別プロジェクト総括成果報告書(2007). (2) “廃棄された原発無人ロボット”,朝日新聞デジタル,http://www.asahi.com/special/10005/TKY201105140193.html(参 照日 2011 年 5 月 14 日). (3) 小栁栄次,“サブクローラを持つレスキューロボット”,日本ロボット学会誌,Vol.28,No.2(2010),pp.147-150. (4) 淺間一他,“災害対応ロボットと運用システムのあり方”,産業競争力懇談会 2012 年度プロジェクト最終報告(2013). (5) 大須賀公一,“災害対応に求められるロボット技術”,日本ロボット学会災害関係記録作成分科会(2011). (6) 淺間一,“東日本大震災および福島第一原子力発電所事故におけるロボット技術の導入とその課題(その 1)”,日 本ロボット学会誌,Vol.29,No.7(2011),pp.658-659. (7) 淺間一,“東日本大震災および福島第一原子力発電所事故におけるロボット技術の導入とその課題(その 2)”,日 本ロボット学会誌,Vol.29,No.9(2011),pp.796-798.
(8) Frigo,M., and Johonson,S.G.,“The Design and Implementation of FFTW3”,Proceedings of the IEEE,Vol.93,No.2(2005), pp.216-231.
(9) Yamauchi,B.M.,“PackBot, A Versatile Platform for Military Robotics”,Proceedings of SPIE,Vol.5422,Unmanned Ground Vehicle Technology Ⅵ,September(2004).
(10) 大和ハウス工業(株), “業界初住宅床下点検ロボット「moogle(モーグル)」の本格運用開始”, 大和ハウス工業 の企業情報,http://www.daiwahouse.co.jp/release/20101020101937.html(参照日 2010 年 10 月 21 日).
(11) RECON ROBOTICS, “Recon Scout IR”,PRODUCTS,http://www.recon-scout.com/index.cfm(参照日 2010 年 10 月 4 日). (12) 広瀬茂男,塚越秀行,米田完,“不整地における歩行機械の静的安定性評価基準”,日本ロボット学会誌,Vol.16, No.8 (1998),pp. 1076-1082. (13) 妻木俊道,内田康之,福島 E.文彦,三浦有信,玉田守,“無人小型視察ロボットの開発”,日本機械学会論文集 C 編,Vol.78,No.793(2012),pp.3267-3278. (14) 内田康之,“地上用携行多機能型ロボットの提案”,第 21 回日本ロボット学会学術講演会予稿集(2003),3G26. (15) 内田康之,古市和也,広瀬茂男,“6 輪不整地走行車「HELIOS-V」の開発”,日本設計工学会誌,Vol.35,No.7(2000), pp.255-261.
(16) Guamieri,M.,Debenest,P.,Inoh,T.,Fukushima,F.E.,and Hirose,S.,“Helios VII: A new vehicle for disaster response-mechanical design and basic experiments”,Advanced Robotics,Vol.19,No.8(2005),pp.901-927.
(17) 広瀬茂男,“ヘビ型ロボットの移動機構”,日本ロボット学会誌,Vol.28,No.2(2010),pp.151-1551.
(18) 亀川哲志,松野文俊,“遠隔操作性を考慮した双頭ヘビ型レスキューロボット KOHGA の開発”,日本ロボット学会 誌,Vol.25,No.7(2007),pp.1074-1081.


![Fig .15 Climbing a 0.025[m] step in height Fig .14 Plan changing posture to climb a step](https://thumb-ap.123doks.com/thumbv2/123deta/6865339.1173429/10.892.531.770.343.950/fig-climbing-step-height-plan-changing-posture-climb.webp)
