論 文
産業応用工学会論文誌, Vol. 9, No. 1, pp. 38-45 (Mar. 2021)The Japanese Journal of the Institute of Industrial Applications Engineers
Online edition: ISSN 2187-5146, Print edition: ISSN 2189-373X, DOI: 10.12792/jjiiae.9.1.38
深層学習と動体検出を組み合わせた動画からの害獣認識手法
中島 彩奈
a,*奥 浩之
a茂木 和弘
a白石 洋一
aWild Animal Recognition Method for Videos
Using a Combination of Deep Learning and Motion Detection
Ayana Nakajima
a,*, Hiroyuki Oku
a, Kazuhiro Motegi
a, Yoichi Shiraishi
a(Received November 26, 2020; revised January 28, 2020; accepted February 9, 2020)
Abstract
This paper proposes a new wildlife image recognition method that combines object recognition based on deep learning and motion detection by inter-frame difference. This method makes it possible that such animal images as difficult to detect by object recognition can be detected by motion detection, and vice versa. The experimental results show the detection ratio and hit ratio are 100% and 84%, respectively, for videos including animals. Our achieved results can provide more efficient solutions for the time consuming and costly mitigation approaches to reduce human-wildlife conflicts.
キーワード:害獣,物体認識,動体検出,組み合わせシステム
Keywords: Human-wildlife Conflict, Object Recognition, Motion Detection, Combination System.
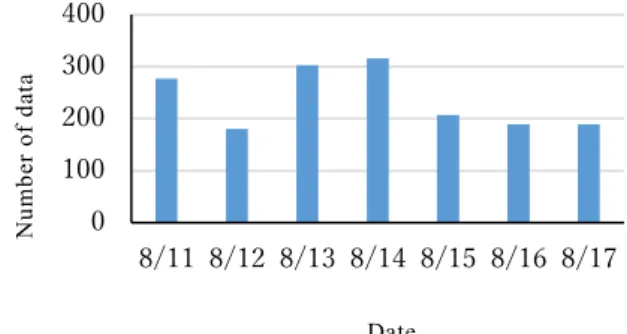
1. 緒言 近年,害獣の生息環境が急激に変化しつつあることに より,我が国では害獣による被害が相次いでいる(1)。害 獣による被害は多岐にわたり,営農意欲の減退,耕作放 棄・離農の増加,さらには森林の下層植生の消失等によ る土壌流出,希少植物の食害,車両との衝突事故等が挙 げられ,被害額以上の影響を及ぼしている。害獣は全国 的に出没し,その種類は場所によって異なるため,自治 体によって各地の害獣種類に合わせた対策が行われてい る(2-4)が,被害防止対策として「個体数管理」「生息地管 理」「被害防除」の三つを同時に行うことが有効であると 言われている(5)。個体数管理とは地域ごとに長期にわた り害獣の個体数や生息密度,分布域を管理することであ り,現在は設置された監視カメラによる録画データを見 ながら頭数を数えるという方法がとられている。監視カ メラはモーションセンサによって起動し,カメラのセン サ範囲内に動く物体があれば 20 秒間程度の動画が記録 される。そのため,風による草木の揺れにもモーション センサが反応してしまい,一日の録画データが大量にな ることもある。Fig.1 は 2020 年 8 月の一週間に一つの監 視カメラで記録された録画データの数であるが,このう ち実際に動物が映っているデータは 20 程度であり,動物 が全く映っていない日もある。録画されたデータは人が 現地に行き回収し,録画データを 1 件ずつチェックしな がら害獣出没の時間や頭数を記録する。しかし,監視カ メラが複数場所に設置されていることや記録データが膨 大なことから,全ての録画データを調査することは難し い。そのため,未解析のまま捨てられることや,風の強 い日は録画量が多いため回収が間に合わずに上書きされ ることもある。これらの理由により完全な個体数管理は
* Corresponding author. E-mail: [email protected] a 群馬大学大学院
〒373-0057 群馬県太田市本町 29-1 Gunma University
29-1, Honcho Ota, Gunma, Japan 373-0057
0 100 200 300 400 8/11 8/12 8/13 8/14 8/15 8/16 8/17
Fig. 1. Changes in the number of recorded data (2020).
Date N um be r of d at a
行われていないのが現状である。近年ではICT の活用に より人がいなくても作動するシステムが提案されている が,遠隔監視や捕獲のためのシステム(6)がほとんどであ る。また,深層学習による画像認識精度の向上により, 畳 み 込 み ニ ュ ー ラ ル ネ ッ ト ワ ー ク(Convolutional Neural Network: CNN)を用いた害獣・害鳥の検出の研究も行われ ている(7-9)。しかしこれらは,害獣の出没を検知し被害を 防ぐための警報を発するシステムや CNN による画像認 識が害獣認識に有効であることを示す研究であり,個体 数管理に関する実用的なシステムは報告されていない。 また,CNN のような AI を用いた認識システムは 100% の精度を保証することは難しく,他のシステムによる 補 助を検討する必要がある。 本研究では物体認識と動体検出の各アルゴリズムを用 いた,個体数管理のための害獣認識システムを提案する。 このシステムは CNN による害獣の認識を行うが,実際 の監視カメラ画像ではカメラの近くを動物が横切るなど 全体像が写らないデータもあり,そうしたデータでは害 獣の認識は難しい。画像認識は主に画像中に物体の全体 像が写っている場合に有効であることが多く,物体の一 部のみの画像では検出例が少ない。CNN を用いた画像認 識では,事前に画像を学習させることで認識が可能とな り,対象の一部分のみの画像を使 用することで,全体像 でなくても検出が可能となると期待される 。しかし,部 位や範囲などを考えるとその構図は無限に存在し,それ ら全てを学習させることは困難である。また,夜間に赤 外線カメラで撮影された白黒画像では,対象の一部分の みで動物種を判断することは人手でも難しく,前後の録 画データから推測する必要がある。提案するシステムは, そのような録画データを考慮し,人手による解析作業の 補助として用いる。全体画像に加え,カメラ付近の部分 画像の認識にも対応するために,フレーム間差分法によ る動体検出を組み合わせる。また,フレーム 間差分法を 用いることで,草木の揺れのような小さな動きと動物の 移動である大きな動きを判別することも可能となると考 えられる。 本論文の構成は次に示す通りである。第 2 章では害獣 認識システムで用いた CNN による物体認識とフレーム 間差分法による動体検出について述べる。第3 章では提 案するシステムの概要について説明し,第 4 章では実際 のデータを用いた実験評価を行う。最後の第5 章では結 言と今後の課題について述べる。 2. 本研究で用いた認識方法 2.1 CNN による物体認識 CNN は深層学習アルゴリズムの一つであり,ニューラ ルネットワーク(Neural Network:NN)による機械学習手法 である。NN は人間の脳をモデル化したもので,脳内にあ る神経細胞とそのつながりを人工ニューロンという数式 的なモデルで表現している。NN には入力層(Input Layer), 隠れ層(Hidden Layer),出力層(Output Layer)があり,それ ぞれがいくつかのノード(Node)を持ち,エッジで結ばれ ている。Fig.2 に CNN の構造と画像の処理イメージを示 す。画像認識等の分野で広く使われている CNN は,中間 の隠れ層が畳み込み層(Convolutional Layer)とプーリング 層(Pooling Layer)で構成され(10), 畳み 込み 層は 入力画像 の局所的な特徴を抽出し,プーリング層では抽出した特 徴の圧縮を行っている。これらの層を複数組み合わせる ことで特徴の抽象化が行われ,新たに入力される画像の 認識や分類が可能となる。 NN の学習は行列演算であり,必要な関数とネットワ ークを定義すれば演算の処理自体は自動実行できる。そ のため,あらかじめ深層学習に必要なプログラムを組み 合わせ,外部から学習データを与えることで実行するこ とができる。このためにフレームワークとライブラリが 開発され,これらを用いて深層学習プログラムを実装こ とが一般的である。本研究ではTensorFlow ライブラリを 用 い た オ ー プ ン ソ ー ス フ レ ー ム ワ ー ク で あ る Object Detection API(11)による物体認識処理を適用する。 2.2 フレーム間差分法による動体検出 動体検出,すなわち移動する物体の検出に対してさま ざまな手法が提案されている。代表的な手法に背景差分 法(12)と フ レ ー ム 間 差 分 法(13)が 挙 げ ら れ る 。 本 研 究 で は OpenCV によるフレーム間差分法を用いて動体検出を行 う。フレーム間差分法は近傍時刻の画像からフレーム間 の差分を検出する方法であり,背景差分法と比較すると 背景画像を用意する必要がないことから,カメラの設置 場所による環境変動にも対応が容易である。 3. 提案する害獣認識手法 本論文では,検出率を低下させることなく人の負担を Fig. 2. Configuration of Convolutional Neural Network
(CNN).
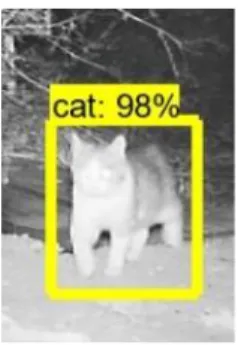
軽減するための害獣認識手法を提案する。提案手法は, 物体認識と動体検出の組み合わせから構成される。物体 認識では Fig.3 に示すように監視カメラに対して極端に 近くにある物体は全体像が見えないため,判別が難しい。 しかし,動きがあれば動体検出では検出できる可能性が ある。一方動体検出では,カメラから離れた位置でエサ を食べているときや静止中など,動きの小さい害獣の検 出は困難であるが,物体認識では検出できる可能性があ る。このように各検出手法の不得意な部分を他の手法で 補完することで,検出率を低下させることなく人の負担 を軽減することが期待できる。 提 案 手 法 を実 装 す る害 獣認 識 シ ス テ ムの 構 成 を Fig.4 に示す。このシステムでは,動画を取得後, 物体認識と 動体検出を用いて動画内に害獣等が含まれるかどうかの 判定を行う。害獣がいると判断された場合,撮影日時や ファイル名など必要な情報をテキストデータとして記録 する。カメラにこのシステムを組み込むことで,将来, 撮影用デバイス内で害獣認識と必要な情報の記録までを 完了することが可能となる。害獣等が検出されなかった 場合,動画データを削除することでカメラの記憶装置の 容量を有効活用する。また,記録したデータを離れた場 所に送ることができれば現地に行くことなく解析結果を チェックすることが可能となり,将来,害獣検出の完全 な自動化も期待できる。 本 研 究 で 用 い た デ ー タ は 自 動 撮 影 カ メ ラ(GISupply TREL10J-D(14))を 用 い て 実 際 に 撮 影 さ れ た 動 画 デ ー タで あり,昼間はカラー画像,夜は白黒画像で記録されてい る。また,動画のフレームサイズは640×480pixel,フレ ームレートは 20 フレーム/秒である。以下では物体認識 と動体検出の適用方法について述べる。 3.1 物体認識の適用方法 CNN を用いた画像認識を行う際には,事前に作成した 学習データを用いたモデルの学習が必要となる。学習を 行うことにより学習モデルを作成し,新たな入力画像に 対する認識が可能となるが,学習データの質は認識精度 に大きく影響するため重要視されている。一般的な物の 物体認識では COCO dataset などの学習用データセット (15)も存在するが,夜間に赤外線カメラによって得られる 画像は一般的な動物画像とは異なるため,実際のカメラ によって得られた画像を用いて学習データセットを作成 する。学習データセットは,画像中で認識させたい領域 を指定するアノテーション処理を適用して得られる。ア ノテーションは画像中の対象物の領域とその対象物名を 指定することである。この作業は学習データ作成時に人 により一度だけ行われる。本論文では監視カメラから得 られる動画に対して物体認識を適用するが,認識はフレ ームごとに行われているために学習画像には静止画を用 いる。実際の動画データから害獣が写っている静止画を 取得し,LabelImg(16)を用いてアノテーションを行う。学 習モデル作成後,実際の動画を用いて学習モデルの精度 を評価する。 作成した学習モデルで評価を行うと,認識された物体 は枠で囲まれ,上部には認識された物体名とその推定確 率を表すラベルが付く。このラベルは推定確率が一番高 いラベルが採用される。Fig.5 では猫の確率が 98%であ ると判定されたことを示している。本研究では動画を扱 うため,フレームごとに異なったラベル名が検出される 可能性があるが,推定確率が最大であるラベルを 最終的 な出力とする。本論文では推定確率80%以上のとき,認 識ありの判定としてラベル付けを行った。また,一つの 動画において一度でもラベルがついた場合,その動画デ Fig. 3. Animal in image near camera
(We assume a boar's body).
Fig. 4. Vermin detection system.
ータでは物体が検出されたこととする。 3.2 動体検出の適用方法 カメラから得られる動画データに動体検出アルゴリズ ムを適用した場合の検出例を Fig.6(a)に示す。緑の点で示 される部分がフレーム間差分法によって差分が検出され た部分であり,フレーム間で動きがあることを意味して いる。この画像内で差分が検出されているのは,画像に 含まれるノイズと草木の細かい揺れなどの 動きである。 これらの不要な動きを除外するために,検出した差分の 輪郭線を抽出して面積を求め,それらの最大面積の領域 を矩形で検出する処理を追加する。この処理を適用した 結果が Fig.6(b)であり,中央の黒猫のみが検出できてい る。 4. 動画データによる検証 本章では物体認識における学習モデルの作成とその評 価,動体検出の検出結果について述べる。100 個の動画 データに対して評価を行うが,一日の記録では動物のい る動画数が極端に少ないため,複数日,複数個所の監視 カメラのデータを用いて100 個とした。そのうち動物が 映っていたのは 46 個であり内訳はイノシシ 37,ネコ 3, ハクビシン3,タヌキ 2,キツネ 1 となっている。残り 54 個は草木の揺れにより赤外線カメラが起動し録画された データである。出没する動物が害獣に含まれるかの判断 は自治体によって異なるが,本論文での動物は全て害獣 として扱うこととする。 4.1 学習モデルの作成と物体認識 学習モデルの作成には評価用のデータとは別のデータ を用いる。動画データからの静止画取得は 1 つの動画に つき 1 つのみ静止画を取得することとした。学習させる 害獣種は録画データに多く含まれていた 4 種の害獣(イ ノシシ・ネコ・ハクビシン・タヌキ)とした。Fig.7 に 4 種 の動物の監視カメラ画像を示す。将来的な害獣認識シス テムは害獣種の判別も正しく行えることが理想であるが, 本論文ではその前段階として,害獣の有無を認識できる ことを第一の目的とした。そのため,害獣種が正しく判 別されているかの評価は行わず,総検出数に対しての検 出率(Detection ratio)と的中率(Hit ratio)を示す。検出率は 害獣ありのデータ数に対する検出数の割合を表し,的中 率 は 誤 検 出(Incorrect detection)を 含 む 検 出 数 に対 す る正 しい検 出 (Correct detection) 数の割合を表す。誤検出と は害獣なしの動画に対して害獣ありと認識されたことを 言う。正しい検出数をCorrect,誤検出数を Incorrect,害 獣ありの録画データ数をNumber of animal data とすると, 検出率と的中率は以下の式で算出する。
Detection ratio(%) = Correct
Number of animal data× 100 (1)
Hit ratio(%) = Correct
Correct + Incorrect× 100 (2) 検出率が 100%となれば害獣ありデータは全て検出でき
(a) Detection including noise and plant swaying
(b) Maximum area rectangle detection
Fig. 6. Motion detection.
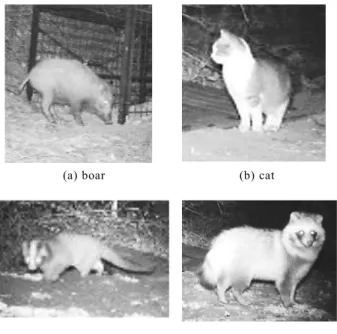
Fig. 7. Camera images of animal.
(a)boar (b)cat
たと言えるが,害獣認識システムとして人の負担軽減を 考慮すると的中率も100%となることが望ましい。 最初の実験として,4 種の害獣各 80 枚の画像を監視カ メラの記録データから取得し,学習モデルを作成した。 この学習モデルの検証を実験 1 とする。実験 1 では 43 個 のデータが正しく検出され検出率は93%となった。しか し誤検出があるため,誤検出した動画を含めた80 個の動 画を人が見直し,その中から43 個の動物のいる動画を探 すという作業が必要になり大きな負担軽減にはつながら ない。誤検出された 37 個の多くは Fig.8 に示すような暗 闇の部分であり,これは学習データの中に Fig.9 に示す ような黒いイノシシ画像が多く含まれていたことが原因 と考えられる。 そこで実験2 として,学習データに用いた画像の半分 を他の画像に変更し学習モデルを作成した。新たに用い た画像はインターネット上でそれぞれの害獣を検索し得 られた画像とし,合計学習画像の枚数は実験1 と同じと した。評価の結果,正しく検出された数は実験 1 と同じ で,誤検出は5 個となった。この原因は葉や草が害獣と し て 検 出 さ れ た こ と が 原 因 で あ っ た 。 ま た , 的 中 率 は 90%であり,実験 1 と比べると誤検出は大幅に減少した。 実験3 では草や葉にもラベルをつけ検出の対象とし, 評価時に草や葉と重なった部分が害獣として検出された 場合,検出なしと見なし認識ラベルを表示させないこと とした。この時の学習データ画像は実験 2 で用いた画像 と同じであり,それらの画像中の草にアノテーションを 追加した。学習用画像は合計で 360 枚あるが,インター ネットから得た画像には草や葉が含まれない画像がある ことや,監視カメラ画像でもノイズが多く鮮明でない草 や葉にはアノテーションを付けなかったことを考慮する と実際にアノテーションを付けた画像は 200 枚程度とな る。この学習モデルでの評価では正しく検出された数は 実験1,2 と同じだがこれまで誤検出となっていたものが なくなり,的中率が100%となった。 実験1~3 の検証結果を Table 1 に示す。Table 1 の括弧 内の数値は害獣ありの動画数であり,何も検出がなかっ たデータ (Not detection) 数に含まれる。実験 1~3 では 同じ 3 個の害獣あり動画について害獣の検出ができなか った。また,実験2,3 で的中率が上がったことから学習 データには監視カメラの害獣画像だけでなく一般的な動 Fig. 8. Image of recognized.
boar
Fig. 9. Training image of boar.
Table 1. Object recognition results (Number of video files including animal: 46, Total number of files: 100). Experiment
No.
Performances Number of data Detection ratio Hit ratio Correct
detection Incorrect detection Not detection 1 93% 54% 43 37 20(3) 2 93% 90% 43 5 52(3) 3 93% 100% 43 0 57(3)
Table 2. Motion detection results (Number of video files including animal: 46, Total number of files: 100). Minimum area
Performances Number of video files Detection ratio Hit ratio Correct
detection Incorrect detection Not detection 0 98% 52% 45 41 14(1) 3000 88% 67% 39 19 42(7) 5000 63% 76% 29 9 62(17)
物画像や,誤検出の原因となる物を認識対象にすること が有効であると考えられる。しかし,本論文で用いたデ ータには存在しなかったが,草木の中に害獣がいる場合 は検出不可となる可能性もあ るため,今後はそれらを考 慮しての学習データを作成する必要がある。また,本論 文では動物の有無のみについて検証を行ったが,今後は 害獣種の判別までを考慮した学習モデルを作成し,人に よる解析が不要なシステムの構築に向けた検証を行う予 定である。 4.2 動体検出 物体認識で検出を行った動画と同じ100 個の動画に対 し動体検出を行った。3.2 節で示したように動きがあると 検出された輪郭線の面積が最大の動きを矩形で表示させ た。前述したように本論文で用いた動画は実際に監視カ メラのモーションセンサで感知した物体を撮影している ため100 個の動画全てに動きがあるが,夜間撮影時の白 黒画像ではフレーム間の差異が検出しづらいことや,輪 郭が捉えられない微小な差異は検出対象にならないため, 動体検出では動きが検出されない動画も存在する。 動きがある物体を検出対象とすると草木の揺れも検出 されるが,草木の揺れの多くはFig. 10 に示すような,葉 の一部分の揺れや遠くに映る草木の揺れなど,害獣の動 きと比較すると小さな動きである。そのため,検出面積 の小さい物体を除外することで草木の揺れの検出軽減が 期待できる。Table 2 に面積指定による検出の比較結果を 表す。最小面積(Minimum area)を指定することで輪郭線内 の面積が最小面積未満の動きは検出対象外とした。評価 の方法は物体認識と同じく検出率と的中率を用いた。 最小面積 0 では動きを全て検出対象としたことを意味 し,100 個のデータ中 86 個検出された。そのうち害獣あ りの動画(Correct detection)は 45 個であり,草木の揺れな ど の 害 獣 以 外 の 動 き を 検 出 し た 動 画 は 41 個 (Incorrect detection)である。検出率は高いが的中率が低く,86 個の データに対して人による確認が必要となる。また,何も 検出がなかった動画(Not detection)は 14 個であり,この うち 1 個が害獣ありの動画である。最小面積を 5000 と することで検出が38 個となり,的中率は上昇した。本研 究で用いた検証用動画には強風の日のデータも多く含ま れたため草木の動きが大きく,検出面積を大きめに設定 したことで,検出率が低くなったと考えられる。そのた め,記録日の天候によって検出する最小面積を調整する ことで検出率・的中率が共に上昇する可能性もある。ま た,最小面積を大きくすると検出ができなくなった動画 の中には害獣がエサを食べている場面や静止中など動き が極端に少ない動画が多く含まれていた。本論文では 3 種類の最小面積を用いて比較を行ったが,カメラの機種 や設置場所によって害獣や草木の映る大きさが異なる場 合には,それらの面積比を考慮した検出面積を設定する ことで環境に応じた検出が期待できる。 本論文では面積の違いによる害獣の検出について検証 を行ったため動画への加工はしなかったが,画像のノイ ズ除去のためにフィルターを用いることで検出精度が向 上する可能性もあり,今後は画像への加工についても検 討を行う予定である。また,黒色の害獣など,風景と似 た色の物はフレーム間の差分が検出しづらくなるため, このような場合の対策も必要である。 4.3 物体認識と動体検出の組み合わせ手法 物体認識で検出不可だった3 つは画面近くに害獣がい る動画や素早い動きの動画であった。害獣が近くにいる 場合は全体像が見えないため検出が困難であったと考え られる。また,画像認識を動画に適用した場合フレーム ごとの処理となるが,素早い動きのある動画はフレーム 分割すると動きによるブレが発生しFig.11 のような画像 となる。これはイノシシの画像だが,イノシシの外見と は違った物体になったために検出ができなかったと考え られる。これらは物体認識の精度を上げても検出するこ とは難しい。しかし動体検出ではこのようなデータでも 動きがある物体に関しては検出が可能であるため,物体 認識では検出できなかった 3 つの動画は検出されていた。 また,本論文で作成した物体認識の学習データにはキツ ネは含まれていなかったが,キツネのいる動画はハクビ シンとして検出されていた。これはキツネの外見がハク ビシンに似ていたためと考えられるが,学習データに含 Fig. 10. Swaying plants.
まれる害獣とは似ていない形の動物が表れた場合は物体 認識での検出は困難となる。このような場合も動体検出 では検出できる可能性があることから,物体認識と動体 認識を組み合わせることで,出現する害獣種が分からな い場合や新たな害獣種が表れた場合でも動物が出現した という記録を残せる可能性がある。 一方で,動体検出で検出不可であった動画は,カメラ から離れて細かい動きが見えづらい位置でエサを食べて いるなど動きの少ない動画や,フレーム間の差異が検出 されないほどのゆっくりとした動きの動画などが挙げら れるが,この場合は全体像が写っているため物体認識で は検出されていた。 つまり,どちらか片方でも検出があったものは害獣あ りの可能性があるデータとみることができる。本論文で 行なった実験においての検出数は物体認識のみの検出が 17 個,動体検出のみの検出が 12 個,両方とも検出があ ったものが 26 個である。この合計 55 個の中に 46 個の 害獣有りデータが含まれているため,検出率は 100%と なった。また,的中率は84%であり,人による解析の負 担軽減が期待できる。今後は害獣の特徴や行動,カメラ の設置場所等を考慮しての検出方法の検討を 行う予定で ある。 5. 結言 本論文では深層学習による物体認識と動体検出を組み 合わせた個体数管理のための害獣認識手法を提案し,そ の適用方法と検証結果について述べた。物体認識と動体 検出にはそれぞれ検出が困難なデータがあるが,二つの 認識方法を組み合わせることでそれぞれのデメリットを 補い合い,検出漏れの無いシステムが期待できる。また, 物体認識では学習データの質が検出精度に影響するため, 監視カメラに記録されるデータを考慮しての学習データ の作成を行い,的中率 100%を達成した。動体検出では 検出の最小面積を調整することで草木に揺れを除外でき る可能性を示した。これら2 つの検出方法を合わせるこ とで害獣ありの動画に対し,検出率 100%,的中率 84% を達成し人の負担軽減のための害獣認識手法の有用性を 示した。 今後の課題として,各検出方法の精度の向上や,害獣 種の判定の自動化や草木の揺れに合わせた面積指定の自 動化など,より人の負担が少なくなる手法の検討を行う 予定である。さらに害獣種の判定では,未学習の動物が 映っていた場合に「その他動物」として表示させること で新たな害獣種にも対応でき,より有用なシステムとな るため検討を行う必要がある。 また,物体認識と動体検出だけでなく他の検出方法と の組み合わせや学習データを必要としない検出方法の検 討や,現在はフレームごとに行なっている処理を動画の 特長を生かした連続データと捉えることで個体識別や個 体追従が行える可能性があり,それらに関する検討も今 後の課題である。 文 献 (1) 農 林 水 産 省 :「 鳥 獣 被 害 の 現 状 と 対 策(令 和 2 年 11 月)」 https://www.maff.go.jp/j/seisan/tyozyu/higai/attach/pdf/index-371.pdf (2) 九 鬼 康 彰 ,武 山 絵 美 ,岸 岡 智 也:「 害 獣 及 び そ の 対 策 に 関 す る 研 究 動 向 と 展 望 」, 農 村 計 画 学 会 誌 ,Vol.33,No.3,pp.362-368,2012 (3) 武 山 絵 美 ,九 鬼 康 彰:「 害 獣 対 策 選 択 行 動 の 違 い に 見 る 害 獣 対 策 の 背 景 と 課 題 」, 農 業 農 村 工 学 会 論 文 集 ,No.257,pp.27-33,2008 (4) 奥 浩之,山路 稔 ,片 山 豪:「群馬 県太田 市八 王子 丘陵・金 山丘 陵
に 生 息 す る ニ ホ ン イ ノ シ シ (Sus Scrofa leucomystax) の 腸 内 容 物 を 用 い たDNA メ タバ ーコー ディ ン グによ る食 性解 析」Bull. Gunma Mus. Natu. Hist., Vol 24, pp 71-80,2020
(5) 農 林 水 産 省:「 農 林 水 産 省. 野生鳥 獣被害 防止 マニ ュアル -イ ノシ シ , シ カ , サ ル ( 実践編) - 平 成 19 年 3 月版」 https://www.maff.go.jp/j/seisan/tyozyu/higai/manyuaru/old_manual/ma nual_inosisi_sika_saru_jissenn_old/data1.pdf (6) 亀 坂 亮 紀 ,星 野 孝 総:「 農 作 物 の 獣 被 害 防 止 シ ス テ ム の 試 作 と 検 討 」, 第34 回フ ァジ ィシ ステム シ ンポジ ウム 講演 論文集 , TA1-1, 2018pp2-14,2018 (7) 吉 原 蓮 人 , 藤 川 晃 希 , 山 重 雄 哉 , 松 村 遼 :「Convolutional Neural Network に よる害 獣検 出」, 産業 応 用工学 会全 国大 会 2017 講 演論 文 集 ,pp.5-6,2017 (8) 初 田 慎 弥 ,大 野 真 史 ,孟 林 ,泉 知 論:「 害 獣 対 策 の た め の 監 視 カ メ ラ 向 け ア ラ イ グ マ 検 出 器 の 構 築 と 評 価 」,画 像 電 子 学 会 誌 ,Vol.48, No.2,pp.237-246,2019 (9) 徳 竹 正 行 ,富 岡 洋 一 ,齋 藤 寛 ,小 平 行 秀:「 畳 み 込 み ニ ュ ー ラ ル ネ ッ ト ワ ー ク を 用 い た 熊 検 出 及 び 制 度 評 価 」, 情 報 処 理 学 会 第 81 回 全 国 大 会 ,1R-01,pp.2-141-2-142, 2019
(10) I.Goodfellow, Y.Bengio, and A.Courville : ”Deep Learning”, MIT Press, 2016
(11) TensorFlow Object Ditection API:
https://github.com/tensorflow/models/tree/master/research/object_dete ction [Accessed 2020.11.21] (12) 川 端 敦 ,谷 藤 真 也 ,諸 岡 泰 男:「 移 動 物 体 像 の 抽 出 技 術 」情 報 学 会 論 文 誌 ,Vol.28, No.4,pp395-402,1987 (13) 馬 場 功 淳 , 大 橋 健 , 乃 万 司 , 松 尾 英 明 , 江 藤 俊 朗 :「 HeadFinder: フ レ ー ム 間 差 分 を ベ ー ス に し た 人 物 追 跡 」 画 像 セ ン シ ン グ シ ン ポ ジ ウ ム2000,pp.329-334,2000 (14) 株 式 会 社 GISupply TREL 10J-D: https://www.gishop.jp/shopdetail/000000001443/ [Accessed 020.11.21] (15) COCO dataset: https://cocodataset.org [Accessed 2020.11.21] (16) labelImg: https://github.com/tzutalin/labelImg [Accessed 2020.11.21]
中島 彩奈 2018 年 3 月群馬大学大学院理工学府理工学専攻 博士前期課程修了。同年4 月群馬大学大学院理工 学府理工学専攻博士後期課程入学,現在に至る。画 像認識,人工知能などの研究に従事。 奥 浩之 1995 年 大阪大学理学研究科高分子学専攻博士 後期課程修了。博士(理学)。1993-1997 年 日本学 術振興会特別研究員。1995-1997 年 米国ジョージ ア大学客員研究員。1997-1998 年 理化学研究所基 礎科学特別研究員。1998 年~現在 群馬大学工学部 助手・助教授を経て大学院理工学府准教授。研究分 野は生体関連化学,ワクチン・検査材料,フィール ド科学。 茂木 和弘 1993 年 群馬大学大学院工学研究科博士後期課 程修了。同年,群馬大学工学部助手。2007 年 群馬 大学大学院工学研究科助教,2014 年 群馬大学大 学院理工学府助教 現在に至る。分散アルゴリズ ム,組込みシステム,人工知能などの研究に従事。 博士(工学)。 白石 洋一 1981 年,東工大大学院修了。同年,(株)日立製 作所中央研究所入所。1993 年,群馬大学工学部に 移動。2001 年~2002 年,UCLA Visiting Scholar。 2005 年,(株)リアライズコンピュータエンジニ アリング(大学発ベンチャー),最高技術責任者。 博士(工学)。研究分野は,人工知能,組合せ最適 化手法,組込みシステム開発手法を含み,これら を半導体設計,自動制御,電気自動車,ドローン, 医療,非破壊検査,等へ応用している。2016 年 Dr. Fatema Rashid Best Paper Award, 2019 年 ECTI-CON Best Paper Award,他受賞。エレクトロニクス実装 学会,電子情報通信学会,情報処理学会,日本機 械学会,計測自動制御学会,日本非破壊検査協会, IEEE,ACM,各会員。