目次 第1 章 緒 言 2 第2 章 膝関節モーメントの測定 3 2.1 はじめに 3 2.2 実験装置と計算方法 3 2.3 実験方法 5 2.4 実験結果 6 2.5 考察 6 第3 章 脛骨前方変位量とACL長 8 3.1 はじめに 8 3.2 実験装置と計算方法 8 3.3 実験方法 10 3.4 実験結果 11 3.5 考察 12 第4 章 結 言 14 参考文献 15 図表 16
第1 章 緒 言
膝関節は骨自体の安定性は低く,靭帯,半月板,筋や腱などの組織が安定性に大きく関 与している.運動時には大きな可動性とともに安定性が要求され,力学的なストレスにさ らされる関節であり,スポーツ障害も多く発生する部位である.
スポーツでの膝関節靭帯損傷のほぼ半数は膝前十字靱帯(Anterior Cruciate Ligament:ACL)
損傷といわれ国内での損傷数は年間2~3 万件,手術数約 1 万 5000 件という整形外科領域 における外傷中,最も重要な疾患である[1].また,ACL 損傷後におこる臨床症状は膝くず れ(giving way)であり,スポーツ活動を大きく 制限するだけでなく,それを放置するこ とにより半月板損傷や関節軟骨損傷などの二次的な関節内の損傷をきたす可能性が高い. その受傷メカニズムや治療については議論が絶えないところであるが,ACL 損傷患者に対 するリハビリテーションは,その機能が再建されるまでは負担をかけないよう,筋力を維 持するために行われる.そして,ACL 損傷や機能再建の度合いは,一般に KT-1000 という 機器によって脛骨前方変位量を測定することで推定される.これは,大腿を固定して下腿 に引き出し力を加えることでACL に張力を与え,変位を測定することで剛性を推定するも のである.しかし,この装置は動作中に用いることはできず,動作中にACL にかかる負担 を推定・測定できるものではない[2]. また,ACL に関する徒手診断である Lachman テストも,同様に下腿を前方に引き出して 動揺性を確認するものである[3].すなわち,下腿が前方に移動することによって ACL に 張力がかかるため,下腿の前方変位量はおおよそ「ACL の張力/剛性」を示す値であると 考えられる.徒手検査は,医師が徒手で患者の症状部位にストレスをかけ,それによって 生じる骨の変位や整復現象などから具体的な疾患とその等級を診断する検査であり,診療 後の回復の評価指標として行われる場合もある.徒手検査は症状を診断するための重要な 役割を担うが,しかし多くの徒手検査では医師の定性的な判断に依存しているため,診断 結果の差異や再現性が得られないという問題や,徒手検査に熟達した医師の技術を若手医 師に教育することができないという問題もある.このような現状から,現在徒手検査の定 量的評価の必要性が高まっている. 一方,動作中の膝関節にかかる負担を解析的に推定する際には,膝関節モーメントを用 いることが多い.関節モーメント解析の目的の1つは,ACL損傷患者の動作のメカニズ ムを分析することである.すなわち,リハビリテーション動作を行った際の保証動作がど の程度の効果をあげているかである.これらの分析によって,より効果的なリハビリテー ション動作や補器具の制作・評価が可能になる.また,筋活動の分析においても古くから 研究がさかんに行われており,筋活動の分析は筋電位計測が行われてきた[4].しかし,こ の手法では筋張力の定量的な評価ができなかった.また,計測に手数がかかり,被験者に 日常的に適用するのは困難であった.このような欠点を改善しようと発展してきたのが関 節モーメント計算の手法である.現時点では関節モーメントを計算することだけが筋活動 を定量的に推定する唯一の方法である. そこで,本研究では動作中の膝関節モーメントを求める装置と脛骨前方変位量および ACL 長を求める装置を製作した.
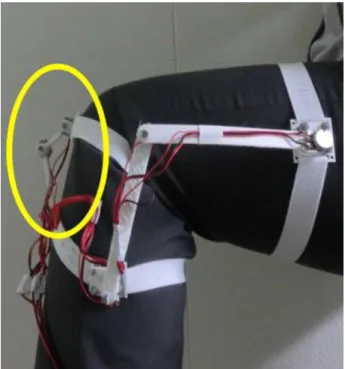
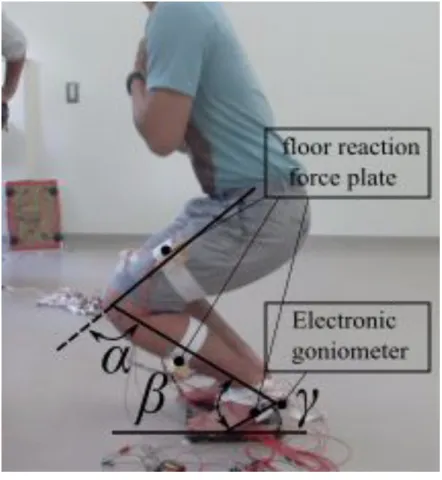
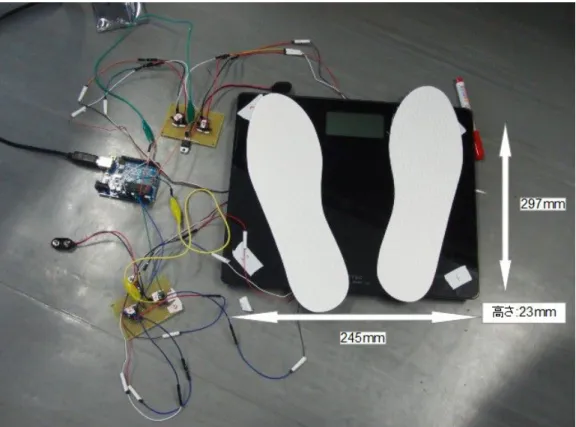
第2 章 膝関節モーメントの測定 2.1 はじめに バイオメカニクス(生体力学)は,文字通り生態を対象とした力学である.運動中の身 体を対象としていつどのような力が作用しているかを知ることを目的としている.運動中 の力で最も重要なのは筋力である.運動中に各筋が発生する筋力を知ることができれば, エネルギー消費量や関節にかかる負担など多くの情報を推定することができる.[5]また, 運動中の筋力を推定する方法として「関節モーメント」がある.関節モーメントとは,各 関節のまわりで筋が身体を回転させようとする「力のモーメント」である.関節モーメン トは定量的な値であるため,運動中の関節モーメントを知ることによって各筋にかかる負 荷をある程度定量的に知ることができる.一般的に関節モーメントは関節周りの角度変化 に関与する全ての筋肉による張力である.また,靭帯や関節包などの発生する受動的張力 なども含まれる. 従来,関節モーメントの計測にはサイベックスなどの筋力計測装置を用いて計算するの が主流であった[6].そのため,歩行中や椅子からの立ち上がり動作などに発揮される筋ト ルクの計測は不可能であった.現在では,3 次元動作計測システムと床反力計を用いて計 算することにより関節モーメントを算出している.しかしながら,関節モーメントを求め るためには,3 次元動作計測システムや床反力計といった大型の機器が必要であり,また それらを設置するための空間も必要となる.以上のように,従来の機器を用いて関節モー メントを計測する場合,簡便に関節モーメントを計測するのは困難である. そこで,本研究では,動作中の関節モーメントを医療現場で手軽に使用できる程度の装 置を製作して測定した. 2.2 実験装置と計算方法 本研究の目的の1 つは動的な動作を行った際の ACL 負荷のメカニズムを分析することで ある.リハビリテーション動作などがどの程度ACL に負担をかけているか分析するために 必要な測定装置を製作した.膝関節モーメントを求めるためには身体にかかる外力と慣性 モーメントの測定値が必要である.身体にかかる外力とは主に重力と釣り合うように働く 床反力である.また,慣性モーメントは動作を行った際に身体の各部位に働く力であり, 測定するためには各関節の角度,加速度,角加速度が必要となる.そのため,床反力と関 節角度を測定する装置を作製し,得られた測定値から膝関節にかかる負担を膝関節モーメ ントとして算出した. 今回製作した実験装置について説明する. 2.2.1 膝関節モーメント測定装置 図2.1 に下肢キネティクスを解析するために必要な膝関節モーメント測定装置を示す. 2.2 で述べたように,膝関節モーメントを求めるためには身体にかかる外力と慣性モーメン トの測定値が必要である.そこで捜査中の外力を測定するための(a)床反力計と慣性モーメ ントを測定するための(b)関節角度計の 2 つを製作した. (a)外力の測定値についてはロードセルを使用し床反力計を製作した.床反力計は,市販 の体重計を元にしたものである.一般に,体重計は,図2.2 に示すように,体重計に乗っ
た荷重全てが四隅に付いたロードセルに掛かるように仕組みとなっている.本研究でも同 様な仕組みの物を製作した.製作する床反力計は,元にする体重計と機械的には全く同じ ものであり,四角形の体重計の四隅にロードセルが取り付いた物とした.体重計の4つの ロードセルを基板から取り外し,図2.3 に示すようにロードセルから出ているコードをジ ャンパ線と半田付けをして,図2.4 の回路と接続した.図 2.5 に完成した床反力計を示す.床 反力計は幅297mm×奥行 245mm×高さ 23mm であった. (b)図 2.6 に製作した関節角度計を示す.関節角度計については 2 軸角加速度センサ (ENC-03)と 3 軸加速度センサ(KRX94-2050)を組み合わせて使用した.各センサの使用を表 1 に示す. 加速度センサはセンサにかかる加速度を検出する.図2.7 に示すように,センサが水平 な状態だとすれば,加速度は重力のみなのでZ 軸方向のみに 1[g]≒9.8[m/s^2]だけかかる.X 軸を中心にセンサが回転すれば,Y 軸方向にも加速度がかかり始める.また,Y 軸を中心 にセンサが回転すれば,X 軸方向に加速度がかかり始める.つまり,重力の大きさと,X 軸,Y 軸方向の加速度が既知であれば,三角関数より角度が求められる仕組みだ. 角速度センサはセンサにかかっている角速度を出力する.速度を積分すれば位置になる ように,角速度を積分すれば角度を算出することが可能である. しかし,加速度センサと角速度センサにはどちらも欠点がある.加速度センサは重力加 速度以外の加速度が加わってしまうと,前提が崩れてしまうため正しく計算できない.ま た角速度センサは回転していない時の出力,ゼロ点を元に角速度を求める.そのため,角 速度センサにはゼロ点が分散する特性(ドリフト)がある.周囲の温度や単なる時間変化で ドリフトするため積分などの計算を行うと正確な値が検出できない.そのため,式(1)に示 すような相補フィルタ[7]を使用し,矢状面上における各セグメントの水平面に対する角度 を測定したうえで,関節角度に換算した.
t
(
t 1
t
)
1
(1) ここで,θt は時間 t における角度,ωはセンサによって測定した角速度,Δt はサンプリン グ時間間隔,φは重力加速度の向きをもとに算出した角度である.αは相補フィルタの重み を表す定数である.つまり,動作を行っていない直立状態や静止状態の際は加速度センサ に重きを置いた値を使用する.本研究では相補フィルタ定数は試行錯誤的にα=0.97 と定め た. 次に,関節角度と床反力をもとに膝関節モーメントを算出する方法について説明する.図 2.8 はモデル図であり,本研究での膝関節モーメントは外力と慣性モーメントの和で算出し た.膝関節モーメントの外力を式(2)に示す.ここで,αは大腿角度,βは下腿角度,γは 足首角度であり,角度計によって計測した値を使用した.l1,l2,L1,L2はそれぞれ踵から 足重心の長さ,膝から下腿重心の長さ,足の長さ,下腿の長さである.また,W1 は足重 量,W2 は下腿重量,W3 は大腿重量,Z は床反力である.下腿にかかる外力は床反力と下 腿各セグメントの重力とし,これが運動することによって慣性力がかかるというモデルに よって,膝関節モーメントを算出した.各セグメントの重量および重心位置については, 文献を参照して決定した[8].(2) 各セグメントの慣性モーメントは,回転軸周りの慣性モーメントの式を用いて式(3)で推定 した. (3) ここで,M1,M2,R1,R2,θ1,θ2 はそれぞれ足の質量,下腿の質量,足の半径,下腿 の半径,足の各加速度,下腿の各加速度であり,外力および重力の膝関節中心からの距離 は,関節角度をもとに算出した[9]. 膝関節モーメントM は外力と慣性モーメントの和で算出できるため,式(4)により算出する ことができる. (4) また,測定,記録を行う装置として,Arduino Leonardo (以下 Arduino という.図 2.9)を 使用した.Arduino は,0V から 5V までの電圧を 1023 段階の分解能で読み取ることが可能 である.また,機能を拡張できる特徴を持つ.通常,Arduino はパソコンに USB で接続し て使用するが,記憶領域と内部電源をArduino に追加することでパソコンに接続すること なく測定,記憶を行うことも可能である. 本実験では,Arduino を USB をとしてパソコンに接続し電源を取り,パソコン内にデー タを記録して関節モーメントの計算に使用した.Arduino の仕様を表 2 に示す. 2.3 実験方法 ACL への負荷は下腿の前方にかかる力によって決定するが,これを評価するには筋力に 関する検討が必要であり,推定にはいくつかの仮定を必要とする.そこで,本研究におい ては,膝関節にかかる負担を単純な膝関節モーメントで評価した.また,別に作製した装 置によって膝関節に対する下腿の前方変位量を測定し,この結果との比較によって,膝関 節モーメントとACL への負荷の関係について考察した. 製作した装置を試用する実験を行った(図 2.1).被験者は健常男子 1 名(23 歳,170cm,66k g)とした.対象動作は①踵をつけたスクワット,②踵を離したスクワット,③ジャンプの 3 種とし,これらの動作を連続して行った.測定された関節角度については,その極大値
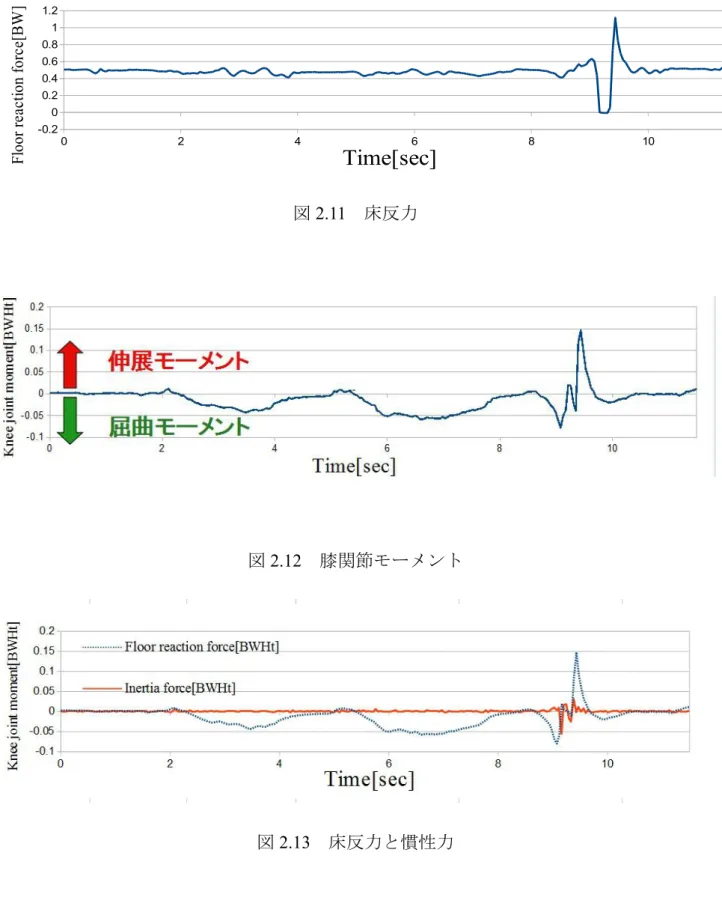
について,被験者の関節にマーカーを設置し,ビデオカメラで動作を撮影することにより, 画像由来の角度と比較した.結果として,関節角度,床反力,脛骨前方変位の測定値と, 膝モーメントの算出値を得た. 2.4 実験結果 ①~③の連続した動作における各関節角度の時系列波形を図2.10 に示す.図 2.10 におい て,横軸は時間を表し,縦軸は膝関節角度を表す.また,●,▲,■のプロット点は①踵 をつけたスクワット,②踵を離したスクワット,③ジャンプの動作の最大屈曲角度を示し たものである.画像最大屈曲角度の判定においては最大屈曲時の画像を取り出し,画像解 析ソフト(モノタロウ)を使用して測定した. ①の動作において,最大屈曲角度α,β,γは実験装置で61 度,42 度,7 度であり,画 像由来では60 度,37 度,0 度という結果が得られた. ②の動作において,最大屈曲角度α,β,γは実験装置で108 度,96 度,43 度であり, 画像由来では100 度,93 度,43 度という結果が得られた. ③の動作においては,8 秒後半あたりから大腿→下腿→足首の順で屈曲していく.また, ジャンプ中は屈曲角が小さくなり着地で衝撃を吸収するために各部位が屈曲を行ってい る.最大屈曲角度α,β,γは実験装置で60 度,70 度,70 度であり,画像由来では 48 度, 80 度,58 度という結果が得られた. 図2.12 に動作中の膝関節モーメントについて示す.横軸は時間を表し縦軸は膝関節モー メントを表す.2 秒~4.5 秒が①の動作,5 秒~8.5 秒が②の動作,9 秒から 10 秒が③の動 作である.また,負の大きさが屈曲モーメントで表され,正の大きさが伸展モーメントで 表されている.また,図2.13 は膝関節モーメントを外力と慣性力に分けたグラフである.横 軸は時間を表し縦軸は膝関節モーメントを表す.グラフから,基本的な動作の場合は床反 力の影響が大きく,慣性力の①,②の動作では慣性力の影響は少ない.床反力の影響が支 配的であるが③の動作では床反力の影響とともに慣性力も大きく関係している. 2.5 考察 3 種の動作を行い,動作中の関節角度,膝関節モーメントを測定した. ①の動作においてα,βはほぼ一致していることから正確な値が計測できていることが わかる.しかし,γでは約7度の計測値のずれが出ている.これは関節角度計の装着によ る問題だと考えられる.今回の実験においては関節角度計はゴムバンドを使用し各部に装 着している.そのため,動作によってゴムバンドがずれたのではないかと考えられる. ②の動作は踵を離した深い屈伸動作であるため屈曲角度は①より大きくなるのは当然で ある.また,①と同様に誤差はあるが正確に値が計測できていることが分かる. ③の動作は最大屈曲角のズレが①,②の動作よりも大きく,関節角度の変化の傾向が異 なっていた.この原因について図2.11 に示す床反力計のグラフと検討した.床反力のグラ フから床反力はジャンプの着地時に最大となる.また,下腿の姿勢がジャンプの後半(9.5 秒),つまり,着地から直立に至る動作で変動が大きくなっていた.これはジャイロセン サーの影響が大きかったと考えられる.具体的な原因は,データのサンプリング周波数(本 実験で0.05s)や角速度センサーの検出範囲(±300 deg/sec)が原因だろう.ジャンプのよ うな速い動作への対応ができなかったことからセンサのずれが生まれていると考えられ
る.速い動作への対策として,サンプリング周波数の大きいセンサを探し実験装置の改良 を行うことが必要である. 次に,図2.12 に示す膝関節モーメントについて考察する.負の大きさが屈曲モーメント で表され,正の大きさが伸展モーメントで表されている.膝関節モーメントを床反力と慣 性力に分けて考えることでどちらの力が支配的であるか調査することができる(図 2.13).グ ラフから基本的には床反力の占める割合が大きい.③の動作に着目すると,床反力の影響 とともに慣性力も大きく関係している.主に屈曲モーメントが作用しており,ACL に負担 がかかる伸展モーメントは床反力の影響が大きい.つまり,ACL 損傷患者のリハビリテー ションは軽度の屈曲動作が適しており,ジャンプなどの床反力が大きくかかる動作は不適 切といえる.
第3 章 脛骨前方変位量とACL 長 3.1 はじめに 第1章で述べたように,脛骨前方変位量は,損傷または再建中のACL の剛性を推定する 際に測定されるものである.診断に利用される代表的な機器はKT1000 であり,これは被 験者を仰臥位にして膝を指定の角度に屈曲させ,下腿を前方に引き出し,その際の引き出 し力と前方変位量の勾配をACL の剛性として評価するものである. ACL に関する徒手診 断であるLachman テストも,同様に下腿を前方に引き出して動揺性を確認するものである. すなわち,下腿が前方に移動することによってACL に張力がかかるため,下腿の前方変位 量はおおよそ「ACL の張力/剛性」を示す値であると考えられる. 脛骨前方変位量の測定方法には,KT1000 のほかに,錘で荷重をかけて X 線透視画像か ら測定するもの(Lerat 法)や, TELOS や GNRB などいくつかの装置も提案されているが [10],動作中の測定を行った例はきわめて少なく, Dejour らが X 線透視画像を用いて測定 した例7)などに限定される.動作中の脛骨前方変位量を測定できれば,ACL にかかる負担 を推定し,ACL への負担によって動作を序列することによって,リハビリテーション計画 などに有用なデータとなることが期待できる.また,自然な動作中に,また装具を装着し たまま脛骨前方変位を測定できれば,患者に対する負担を減らし,測定の信頼性が向上し, 新たな診断装置としての有用性も期待できる. また,膝関節には脛骨前後移動により膝関節モーメントを制御するという役割がある.膝 伸展の際は大腿四頭筋に力が働き,脛骨は前方に移動する.そして,大腿四頭筋の力を制 御しようとACLが緊張する.逆に,屈曲の場合はハムストリングに力が働き,脛骨は後 方に移動する.そして,ハムストリングの力を制御しようとACL が弛緩する. そこで本研究では,動作中に脛骨前方変位量とACL 長を測定する装置を設計製作し,測定 値の妥当性について検討した. 3.2 実験装置と計算方法 3.2.1 脛骨前方変位量測定装置 本研究で使用する脛骨前方変位測定装置(図 3.1)は,従来の装置[バイオメカニズム]に対 して「膝蓋骨上の参照点を大腿骨上に置き換える」という改善を施したものである.従来 の装置(図 3.2)では参照点を膝蓋骨に設けたが,本来 ACL は大腿骨と脛骨をつなぐ靱帯で ある.そのため,膝蓋骨に参照点を設けることは測定結果の正確さを損ねる可能性がある. また,従来の実験では動作によるゴムバンドのずれが生じていた.したがって大腿骨参照 点での大腿骨軸角度の計測を2 点に増やし(図 3.3),平均をとることでより正確な大腿骨軸 の角度の計測が可能になり,機能向上を目指した. さらに,脛骨と大腿骨の相対位置・姿勢を測定できることにより,膝屈曲角度をも単一の 装置で測定することができ,従来の実験の簡易性が増す.また装置に対するACL 付着部の 位置をパラメータとすることでACL 長を推定することも可能になった. 図3.1 に今回製作した改良型脛骨前方変位量測定装置を,図 3.4 に算出モデルを示す.実 験装置はオープンリンク機構であり,その一方の端点を下腿に,他方を大腿骨参照点に設 置する.節部は三次元造型機によってPLA 樹脂で成型し,脛骨前方変位測定装置の節長は l1=80mm,l2=120mm とした.角度計には可変抵抗器 16K4(Supertech 社)を用い,電圧値
をマイクロコントローラ(Arduino Leonardo)で測定して角度に換算した.装置はゴムバン ドによって装着するものとした.各節の長さが既知であれば,節間の角度を測定すること によって,下腿側に固定された脛骨軸と大腿骨参照点の距離の変化を式(5)で計算すること が可能である.
l
1sin
l
2sin
d
(5) このとき,下腿軸と大腿部参照点の距離d は,ACL のひずみ量にかかわらず,膝の屈伸運 動によっても変化する.具体的に言えば,膝を屈曲すると大腿骨が後方移動するため,相 対的には脛骨が前方移動することとなる.そのため,膝屈曲角度を同時に記録しておき, 同一の膝屈曲角度において測定された距離の比較によって,ACL のひずみ量を推定できる ようにした.膝屈曲角度を測定する方法は様々であるが,本研究では,角度計と開リンク 機構を用いたものとした.膝屈曲角度θは式(6)によって求められる.
(6) 図3.1 に製作した実験器具を装着した図を示す.測定される脛骨前方変位量は相対的な ものであるため,直立姿勢で変位量0を定義し,しかる後に測定を行うものとした.また, 従来の実験装置は,固定方法により動的な動作中にゴムバンドがずれる問題があった.そ こで脛骨軸に固定する部品を脛骨軸に沿った適度な長さに変更し動作によるずれを極力少 なくするよう改良した. 次に,ACL 長の計算方法について説明する.図 3.5 に 2 次元での ACL 算出モデルを示す. ACL 長の推定は各節の長さと節間の角度から座標を計算し,ベクトルの大きさから ACL 長を推定する.本来はACL 長の変化は膝関節角度だけではなく,脚の回旋,回反も影響す るため3 次元での測定方法が理想である.しかし,今回の実験ではスクワットなどの基本 動作であるため,回旋や回反の影響は少ないと考えた.また,試作段階の実験装置である ため2 次元での計算のほうが簡易的であることを理由に 2 次元の計算方法を使用した. 図3.5 に ACL 計算方法を示す.O(0,0)を原点とすると,各点の座標はベクトル計算式か ら下記のように計算できる.
1 1 1 1cos
sin
A
l
l
)
sin(
)
cos(
cos
sin
B
2 1 2 1 2 1 1 1 1
l
l
l
2 1 3 2 1 3 2 1 3 2 1 3 2 1 2 1 2 1 2 1 1 1 1)
cos(
)
sin(
)
sin(
)
cos(
)
sin(
)
cos(
cos
sin
C
c
c
l
l
l
2 1D
d
d
ACL 長は C 点と D 点のベクトルの大きさなので式(7)で計算することができる.ここで大 腿骨側のACL 付着部(C 点)と脛骨側の ACL 付着部(D 点)は個人差があるため X 線透視画像 を用いて座標を測定する方法が最適である.しかし,本研究の目的はウェアラブルかつ簡 易的な実験装置の製作・測定であるため,ACL 付着部の座標の決定は装着してからのパラ メータとなる.そこで本実験では,十字靭帯模型を使用し,C 点は大腿骨参照点から(-10,-10), D 点は(-25,50)と決定した. 2 3 2 1 3 2 1 2 1 2 1 1 2 3 2 1 3 2 1 2 1 2 1 1 ACL )) cos( 10 ) sin( 10 ) sin( cos 50 ( )) sin( 10 ) cos( 10 ) cos( sin 25 ( l l l l l (7) 3.3 実験方法 動的な動作における脛骨前方変位量とACL 長の関係について調べることを目的とし,① 関節角度実験②板厚実験③荷重実験(関節角度固定)④荷重実験(屈曲・伸展)の 4 種の実験を 行った. ①:製作した装置を試用する実験を行った.被験者は健常男子2 名とし,右脚を対象と した.対象動作は踵をつけた深いスクワットとし,動作中における関節角度が正確に測定 できているか実験を行った.測定された関節角度については,2 章で行った関節角度実験 と同様に,その極小値・極大値について,被験者の関節にマーカーを設置し,ビデオカメ ラで動作を撮影することにより,画像由来の角度と比較した(図 3.6). ②:製作した測定装置を使用し,脛骨前方変位量の妥当性を検証する実験を行った.下 腿に装着している角度計と下腿との間に薄い金属板を挟み金属板の厚さが実験結果として 現れることを確認した(図 3.7).今回の実験では厚さ 3mm の金属板を用い,2 度のスクワッ ト動作において,金属板を挟んだ場合と挟まない場合とで結果を比較した.板厚3mm が正 確に測定できていれば本装置が脛骨の仮想的な脛骨の前方変位量が測定できていると言え る. ③④の実験においてはACLにかかる張力の大小が推定しやすい条件を設定した. ③:②の実験においては板厚による仮想的な脛骨前方変位が測定できることは示された が,実際に脛骨の変位について示された訳ではない.そこで本節では実際に脛骨の変位を 測定することを目的とした実験を行った.実験方法は脛骨を固定した状態で大腿骨に荷重 をかけ,相対的な脛骨の前方変位をX 線検査で画像として比較することを目的とした Lerat 法をアレンジしたものである.Lerat 法は X 線検査で画像を比較する実験であるが,我々が 実施した実験は測定装置を装着して脛骨の相対的な前方変位を測定し,結果を数値化して 比較することが目的である. 図3.8 に実験の様子を示す.屈曲角度を固定した状態で大腿に重りをつけ荷重を増加さ せていく実験を行った.可能な限り大腿にだけ荷重をかけるようにするため荷重をかける 位置は膝蓋骨から150mmの位置とした.荷重は無荷重の状態から 2kgf,4kgf の 3 種とし, 重りの条件が変わった際は一度安定をさせるため5 秒間の時間を置いた.結果として,脛骨自体は膝が低屈曲で固定されているので変位せず,大腿に荷重をかけ ることで大腿骨が後方移動するため,相対的には脛骨が前方移動する結果が得られると予 想される.したがって,大腿骨に荷重をかけることでACL にかかる張力も増加し,ACL は弛緩する結果が得られると予想される. ④:脛骨前方変位量とACL 長が筋力による影響を受けるか検証するため,ACL にかか る張力の大小が推定しやすい条件を設定した.対象動作を図3.9 に示す.足先におもりに よって荷重をかける条件で実施した.動作は椅子に座った状態から膝を伸展させる座位膝 伸展動作とする.荷重は,無荷重,2kgf,4kgf の 3 種とした.それぞれの荷重において屈 伸を行った.座位膝伸展の条件では,重力による膝屈曲モーメントとつり合うよう大腿四 頭筋が働き,結果として脛骨は前方に移動し,ACL は脛骨前方移動を制御しようと弛緩す ると予想される. 3.4 実験結果 ①:被験者2 名の実験①の結果を表 3 ・図 3.10 に示す.被験者 1 は深いスクワット動作 を行い,被験者2 は浅いスクワット動作を行った.測定の結果は横軸にデータ数,縦軸に スクワット時の膝関節角度を表す.グラフ中の●,▲のプロット点はそれぞれ画像由来の スクワット時の最小屈曲角度,最大屈曲角度である.被験者1 の場合実験装置での最小屈 曲角度は0 度,最大屈曲角度は 83.6 度であった.また,画像由来での最小屈曲角度は 0 度, 最大屈曲角度は82.1 度であった.被験者 2 の場合実験装置での最小屈曲角度は 0 度,最大 屈曲角度は38.3 度であった.また,画像由来での最小屈曲角度は 0 度,最大屈曲角度は 38.9 度であった. ②:図3.11 に②の結果を示す.横軸に膝屈曲角度を,縦軸に脛骨軸と大腿部参照点の距 離d(グラフ上では AT 距離とする)をプロットすることで表示する.同一の膝屈曲角度にお けるプロット点が上にあるほど脛骨は前方,下にあるほどACL の張力は大きいものと考え られる.板無しの場合と,3mm の金属板を挟んだ場合のプロット点を線形近似すると,近 似線はそれぞれ「d[mm]=0.5201θ[deg]+55.293」,「d[mm]=0.51118θ[deg]+57.81」となる.ま た,差の平均値は3.2mm であった.これは挟んだ金属板の 3mm とほぼ一致した.また, スクワット動作でのAT 距離を図 3.12 に示す.屈曲角度 30 度を例にして検証すると,同一 屈曲角度におけるスクワット動作では屈曲動作時よりも伸展動作時に脛骨が前方に位置し ていることが分かる. ③:図3.13 に関節角度固定下における荷重実験の結果を示す.横軸は大腿骨にかけた荷 重の大きさを,縦軸はAT 距離を表す.無荷重と荷重ありを比較した場合,荷重の増加に より,脛骨は前方に移動する結果が得られた.荷重によるAT 距離の増加は 1.487mm であ った.しかし,荷重を2kgf から 4kgf に増やした場合では AT 距離の変化は小さく,-0.3147mm 脛骨が後方に移動する結果となった.図3.14 に ACL 長の結果を示す.ACL 長は荷重に伴 い増加する結果となった.無荷重から2kgf に増加させた場合,ACL 長は約 1mm 増加し, 2kgf から 4kgf の場合は 2.25mm 増加する結果となった. ④:図3.15 に座位伸展動作における AT 距離の結果を示す.横軸は大腿骨にかけた荷重 の大きさを,縦軸はAT 距離を表す.無荷重,2kgf,4kgf の結果の近似線はそれぞれ 「d[mm]=0.461θ[deg]+38.615」,「d[mm]=0.4736θ[deg]+39.339」,「d[mm]=0.4776θ [deg]+40.364」であった.膝関節角度 30°を例に挙げ,脛骨前方変位量を表 3.15 にまとめ た.表3.15 から荷重を 2kg 増やすと脛骨前方変位量が 1mm ずつ大きくなっているのが分
かる.図3.16 に ACL 長の実験結果を示す.各プロット点を線形近似式で比較すると,屈 曲角度が20~30 度の場合は 4kgf 荷重で最小となった.さらに 50~70 度における屈曲角度 の場合は荷重に伴ってACL 長は増加した. 3.5 考察 ①:関節角度比較実験において,被験者1 の対象動作である踵をつけた深いスクワット は最小屈曲角の差は0 であり,最大屈曲角の差は 1.5 度であった.また被験者 1 での浅い スクワットは最小屈曲角の差は0 であり,最大屈曲角の差は 1.5 度であった.この結果か ら双方の動作は実験装置の角度と画像由来の角度でほぼ一致している結果が得られた.つ まり膝関節角度においては妥当性のある値が使用できる結果となった.しかし,若干では あるが,浅いスクワット動作に比べ,深いスクワット動作の差は大きくなっている.これ は固定方法によるものだと考えられる.本装置はゴムバンドで下腿,大腿に固定している ため,大きな動作によってゴムバンドがずれたことが要因だろう.また,被験者は長ズボ ンを着ており,ズボンのずれも考えられる.固定方法についてはマジックテープを使用し た実験装置にするなどの改良が必要だ. ②:板厚荷重実験において厚さ3mm の金属板が検出できるか実験を行ったところ,板厚 測定の結果は3.2mm であった.つまり 0.2mm 程度の差に抑えられたことから脛骨前方変位 量測定装置の仕組みについては,妥当性のある結果が得られた.また,考えられる測定誤 差の原因としては装着した測定装置のずれが考えられる.次に,図3.12 に示すスクワット 動作について考察する.グラフから,同一屈曲角度におけるスクワット動作をみると屈曲 動作時よりも伸展動作時に脛骨が前方に位置していることが分かる.これは3.1 節で述べ たように,膝関節には脛骨前後移動により膝関節モーメントを制御するという役割による ものだと考えられる.そのため,膝伸展の際は大腿四頭筋に力が働き,脛骨は前方に移動 する. ③:実験結果から,脛骨を固定したうえで大腿に荷重をかけると相対的に脛骨が前方に 変位するという結果が得られた.また,荷重の増加によって脛骨前方変位量が増加する結 果が得られたが,2kgf から 4kgf の荷重をかけた際は,脛骨が後方に移動するという結果と なった.これは下腿の固定方法によるものだと考えられる.今回の実験は椅子に足をかけ る形で固定したため,4kgf の荷重をかけると,固定した屈曲角度が大きくなってしまうと 考えた.この実験では膝関節角度の固定は実験結果に影響を与えるので脛骨及び膝関節角 度の固定法を考える必要がある.ACL 長については荷重とともに ACL 長が増加する結果 が得られた.これは大腿に荷重をかけたことによる脛骨の移動なのである程度妥当性のあ る結果が得られたと考えられる. ④:座位伸展動作における荷重実験の結果について考察する.脛骨前方変位量に関して は荷重の有無,荷重の増減いずれの条件においても明確な傾向を確認することができた.前 述のように座位伸展の条件では,重力による膝屈曲モーメントとつり合うよう大腿四頭筋 が働き,結果として下腿は前方に移動することが分かった.このことから座位伸展動作中 においては脛骨前方変位量を測定できたと考えられる.. ACL 長に関しては 20~30 度の場合は荷重に伴い ACL 長は増加しておらず,妥当性は見 られなかった.しかし,50~70 度における屈曲角度の場合は荷重に伴って ACL 長は増加 する結果となった.一部の屈曲角度においてのみACL の規則性がみられた理由については 今回不明であったが,センサのずれなどが関係しているのではないかと考える.対策方法
として,ビデオ撮影を同時に行い,実験の開始時と終了時でセンサのずれを画像由来で調 べることができるのではないかと考えた. 以上のことから,本研究で設計製作した装置は,限定された動作においてのみ,脛骨前 方変位量とACL 長をおおよそ正しく測定できていると考えられる.また,測定装置の問題 点をまとめると,下記のようになる. (1) 根本的な問題点として,回旋,回反など前方変位以外の 5 軸運動を無視しているため, ACL への負荷がどの程度正確に測定できているかは未検証である. (2) いずれの実験においても測定装置のずれによる値のばらつきが問題となった.そのた め,今後の実験装置の装着については,ばらつきが生じにくい点や固定法を検討する必要 がある.
第4 章 結 言 本研究では,簡便な床反力計と関節角度計を製作し,これを用いて膝モーメントを推定 する実験を行った.その結果,膝モーメントは床反力の影響が支配的であり,慣性力はジ ャンプの場合のみ影響した.また,速い角速度を伴うジャンプの様な動きは角度のズレや 変動が大きかった.今後の課題は,関節角度計の固定の仕方やジャンプの様な速い角速度 を伴う動きに対応出来るようにすることである. また,動作中に脛骨前方変位量とACL 長を測定する装置を設計製作し,測定値の妥当性 について検討する実験も行った.その結果,膝伸展の際は大腿四頭筋に力が働き,脛骨は 前方に移動する.そして,大腿四頭筋の力を制御しようとACLが緊張する結果を定性的 に確かめることができた.逆に,屈曲の場合はハムストリングに力が働き,脛骨は後方に 移動する.そして,ハムストリングの力を制御しようとACL が弛緩するということだ. 本実験では,ACL 長の計算は 2 次元モデルでの計算によって算出したが,ACL 長には脚 の回旋,回反なども影響する.そのため,現在は3 次元 ACL 推定装置を設計し開発中であ る.したがって,今後の課題は設置位置や機構を再検討し,定量評価が可能なよう改良す ることである.
参考文献
1) 宗田大:前十字靱帯(ACL)損傷の診断と治療,東京スポーツ整形外科研修会, 31-32, (2009).
2) Isberg, J., Faxen, E., Brandsson, S., Eriksson, B. I., Karrholm, J. and Karlsson, J.: KT-1000 records smaller side-to-side defferences than radiostereometric analysis before and after and ACL reconstruction, Knee Surg Sports Traumatol Arthrosc, 15, 529-535, (2006).
3) Wiertsema, S. H., van Hooff, H. J. A., Migchelsen, L. A. A. and Steultjens, M. P. M: Reliability of the KT1000 arthrometer and the Lachman test in patients with an ACL rupture, The Knee, 15, 107-110, (2008).
4) Beldame, J., Bertiaux, S., Roussignol, X., Lefebvre, B., Adam, J. M., Mouilhade, F. and Dujardin, F.: Laxity measurements using stress radiography to assess anterior cruciate ligament tears, Orthopaedics and Traumatology, 97, 34-43, (2011).
5) 山本澄子, バイオメカからみた計る, 理学療法科学, 11(1996), pp.153-160. 6) 清水 泰雄,CYBEX II による膝関節運動の筋力評価に関する研究,11(2010),pp.32 7) Albert-Jan Bearveldt , Robert Klang , A Low-cost and Low-weight Attitude Estimation
System for an Autonomous Helicopter , INES, 1997, pp.391-395
8) Clauser CE McConville J.T and Young J.W., Weight, volume, and center of mass of segments of the human body, AMRL Technical Report, AMRL-6970(1969).
9) Bouguennec, N., Odri, G. A., Graveleau, N. and Colombet, P. : Anterior knee laxity measurement: Comparison of passive stress radiographs Telos and Lerat, and GNRB arthrometer, Orthopaedics and Traumatology, 98, 744-750, (2012).
10) Beldame, J., Mouchel, S., Bertiaux, S., Adam, J. M., Mouilhade, F., Roussignol, X. and Dujardin, F. : Comparative reproducibility of TELOS and GNRB for instrumental measurement of anterior tibial translation in normal knees, Orthopaedics and Traumatology, 101, 301-305, (2015).
図2.1 キネティクス測定装置
図2.3 ロードセルとジャンパ線接続
図2.5 床反力計
表1 各センサ仕様 2 軸角加速度センサ 3 軸加速度センサ 名称 ENC-03 KXR94-2050 電源 2.7~5.25[V] 2.5~5.25[V] 検出範囲 ±300deg/sec ±2G 応答性 50Hz 800Hz 感度 0.67mV/deg/sec 660mV/g 図2.7 センサの仕組み 図2.8 膝関節モーメントモデル図
図 2.9 arduino leonardo 表2. arduino の仕様
0 2 4 6 8 10 -0.2 0 0.2 0.4 0.6 0.8 1 1.2
Time[sec]
Fl oo r re ac tio n fo rc e[ B W ] 図2.11 床反力 図2.12 膝関節モーメント 図2.13 床反力と慣性力図3.2 従来の脛骨前方変位量測定装置
図3.5 2次元 ACL 算出モデル
図3.7 板厚実験
図3.9 荷重実験(座位膝伸展) 表3 膝関節角度実験結果 最大屈曲角度(被 験者1) 最小屈曲角度(被 験者1) 最大屈曲角度(被 験者2) 最小屈曲角度(被 験者2) 実験結果 83.6 0 38.3 0 画像由来 82.1 0 38.9 0 図3.10 膝関節角度実験結果
図3.11 板厚実験結果
図3.13 AT距離(屈曲角度固定)
図3.15 AT距離(荷重実験)
表3.15 AT距離(荷重実験)

![表 1 各センサ仕様 2 軸角加速度センサ 3 軸加速度センサ 名称 ENC-03 KXR94-2050 電源 2.7~5.25[V] 2.5~5.25[V] 検出範囲 ±300deg/sec ±2G 応答性 50Hz 800Hz 感度 0.67mV/deg/sec 660mV/g 図 2.7 センサの仕組み 図 2.8 膝関節モーメントモデル図](https://thumb-ap.123doks.com/thumbv2/123deta/6366810.632911/19.892.85.798.137.303/センサセンサセンサV±HzHzセンサ仕組膝関節モーメントモデル.webp)