2004 年度卒業論文
報道記者ロボットシステムの開発 -RFID を使ったロボット位置検出 -
提出日: 2005 年 2 月 2 日
指導: 村岡洋一教授
早稲田大学理工学部情報学科 学籍番号: 1G01P0086
池長 慶彦
目 次
第1章 序論 5
1.1 はじめに . . . . 5
1.2 本論文の要点 . . . . 6
1.3 本論文の構成 . . . . 8
第2章 ロボット間通信について 10 2.1 ロボット間通信について . . . . 10
2.1.1 ロボット間通信の必要性 . . . . 10
2.1.2 ロボット間通信の実現方法 . . . . 10
2.1.3 写真要求クエリーとその処理 . . . . 11
第3章 ロボットの位置検出 12 3.1 ロボットの位置検出 . . . . 12
3.1.1 関連研究 . . . . 12
3.1.2 タグの検討 . . . . 13
3.1.3 RFIDについて . . . . 13
3.1.4 RFIDを用いた距離情報の取得 . . . . 14
3.1.5 RFIDを用いた方向の取得方法 . . . . 16
3.1.6 画像によるフィードバック . . . . 20
3.1.7 位置予想アルゴリズム . . . . 21
第4章 ロボットの自律行動 23 4.1 ロボットの自律行動 . . . . 23
4.1.1 ロボットの自律行動における問題点 . . . . 23
4.1.2 解決策 . . . . 23
4.1.3 ロボットの自律行動 . . . . 23
第5章 Webサーバの構成と処理 25 5.1 Webサーバの構成 . . . . 25
5.2 Webサーバの処理 . . . . 26
第6章 システムの実験結果の評価 29 6.1 . . . . 29
6.2 実験の結果 . . . . 29 6.3 評価・考察 . . . . 30
第7章 結論 31
7.1 まとめ . . . . 31 7.2 今後の課題 . . . . 31
図 目 次
1.1 NEC PaPeRo . . . . 7
1.2 報道記者ロボットの一連の流れ . . . . 7
3.1 RFIDタグ . . . . 14
3.2 RFIDリーダー . . . . 14
3.3 RFID受信機と報道記者ロボット . . . . 15
3.4 予想座標 . . . . 17
3.5 RFIDを用いた方向の取得 . . . . 17
3.6 RFIDを用いた方向取得の問題点 . . . . 18
3.7 重み付けを行った方向取得 . . . . 19
3.8 RFIDの感度変化による位置予測 . . . . 20
3.9 ロボットの領域分割 . . . . 21
3.10 画像による予想座標のフィードバック . . . . 22
5.1 Webサーバの構成 . . . . 25
5.2 写真検索画面 . . . . 27
5.3 検索結果画面 . . . . 28
表 目 次
3.1 RFIDの受信感度と受信範囲 . . . . 15 6.1 実験結果 . . . . 29
第 1 章 序論
本研究の目的は報道記者ロボットの実現である.報道記者ロボットとは,人間世界 でいうカメラマンの役割を持つロボットである.具体的には自律的に被写体となる 人物を見つけ出し,的確な構図で写真をとり記事としてWeb上に自動生成すると いうロボットである.ユーザーはロボットが自動的に生成した記事をブラウザを通 して閲覧することができる.本システムでは被写体を見つけるためにロボット間の 通信を行う.また,個々のロボットの位置関係を把握する方法としてRFID タグを 使用する.これにより,被写体のロボットを見つけ被写体に移動し写真をとること ができるようになった.本論文では,本システムを実現するにあたり,解決すべき課 題であるロボット間通信,ロボットの位置検出,ロボットの自律行動,Webの自動生 成について述べる.
1.1 はじめに
本研究は,報道記者ロボットを実現するための課題であるロボット間通信,ロボッ トの位置検出,ロボットの自律行動,Webページの生成を解決することが目的であ る. 報道記者ロボットとは,人間世界でいうカメラマンの役割を持つロボットであ る.自律的に記事となるものを探し出し,撮影しそれを記事としてWeb上にアップ するロボットである報道記者ロボットが人間にかわり的確で面白い記事やアルバ ムを作成することができれば,報道記者ロボットは日常生活に溶け込み,人と密着 にかかわりあう存在として将来位置づけられ,様々な場所での活躍が期待されるも のになると考える.本研究が扱う報道記者ロボットの好例としては,幼稚園や保育 園があげられる.保護者は,幼稚園や保育園において自分で子供の様子を見ること ができない.したがって,報道記者ロボットが自動的にアルバムを作成してくれる ことは,保護者にとって非常に有益であると考えられる. そこで将来的にロボット が自律的に面白い記事やアルバムなどを作成することをめざす. 本研究ではその 第一段階として,ロボットと遊んでいる子供達を認知し,撮影対象のロボットと子 供に接近し構図をあわせ撮影しその写真をWeb上に自動的にアップするというロ ボットのシステムの研究開発を行う. そこでは大きくわけて5つの課題がある.
1. 報道記者ロボットが被写体をみつけるまで自由行動を行う.
3. 報道記者ロボットが撮影対象ロボットに接近する.
4. 報道記者ロボットが適切な構図を探し写真を撮影する[1]
5. 報道記者ロボットが撮影した写真をWeb上に自動的にアップをする 本研究では,(1),(2),(3),(5)について述べる.
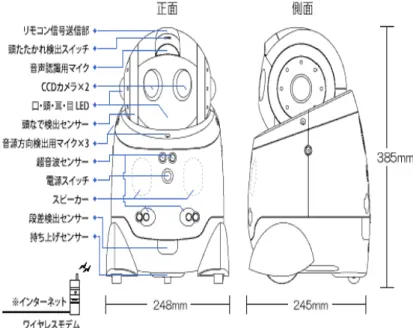
予想する実行環境は,約10m四方の室内にロボットが約4台,そのうち1台は報 道記者ロボットとする.子供は各ロボットに約3人遊んでいるものとする.報道記 者ロボットにはRFID受信機をとりつけ,他のロボットにはRFIDタグ(送信機)
をとりつける.また,各ロボットに無線LAN機能をつけておき,ネットワークを使 用することができる. 図1.2は本システムの一連の流れを表した図である. まず,報 道記者ロボットは自律行動を行いブースを巡回して各ロボットの位置を把握する.
次に,各ロボットは,子供と遊んでいることを検出すると,ロボット間通信をつかっ て報道記者ロボットに写真撮影要求クエリーをだす.クエリーを受け取った報道記 者ロボットは被写体となるロボットまで移動し,適切な構図で子供とロボットを撮 影する. そして,撮影した写真をWebにアップする. 本研究では,報道記者ロボッ トで実現すべき課題であるロボット間通信,ロボットの位置検出,ロボットの自律 行動,写真を自動的に表示するWebサーバの構築について扱う. 本システムではロ ボットに,NEC社製のパーソナルロボット「PaPeRo」を使用した. PaPeRoとは, パートナー型パーソナルロボット(Partner-type Personal Robot)の頭文字をとっ たもので,家庭で一緒に過ごしながら,人とやりとりをすることができるロボット を目指して開発した試作機である.[2]また対話機能・人物認識機能による人間との インタラクションを得意とする[3] 1.1はNECのPaPeRoである.
1.2 本論文の要点
本節では,報道記者ロボットを実現する上で,重要なポイントを挙げ,その実 現法を述べる.そのポイントは次の4つである.
1. ロボット間通信
報道記者ロボットが子供がロボットと遊んでいることを検知することが重要 である.そこで,本研究では子供と遊んでいるロボットと報道記者ロボットが 通信することで,子供とロボットが遊んでいることを検知することに成功し た.ロボット間通信では,サーバーを介してそれぞれのロボット間での通信を 実現した。各ロボットは,RFIDに使われる固有のIDによって識別されるた め相手先のIPを意識する必要なく通信をすることができるようになった.
2. RFIDによるロボットの位置検出
図 1.1: NEC PaPeRo
図 1.2: 報道記者ロボットの一連の流れ
報道記者ロボットは,子供と遊んでいるロボットから通知をうけるとそこま で移動を行う.そのとき,報道記者ロボットは通知を受けたロボットの位置を 検出しておかなくてはならない.本システムではRFID送信タグを各ロボッ トに装着し,報道記者ロボットにRFID受信機を設置することで,おおまかな ロボットの位置検出を行った.また,最終的な位置の検出の処理をサーバーで 行うことでロボットにかかる処理を軽減した.またそれに加えて画像処理に よるロボットの位置検出を利用することで精度を高めることができた.
3. 報道記者ロボットの自律行動
報道記者ロボットが他のロボットからの通知を受けたときに,すばやくその 通知を出したロボットまで移動するために,通知をうけるまえにあらかじめ 部屋を徘徊し各ロボットの位置を検出しておくことが望まれる. このとき問 題になるのが障害物である.本システムでは超音波センサーを使うことで障 害物を検知し,自律的に部屋を徘徊し各ロボットの位置を検出することがで きた.
4. WebServerの構築
報道記者ロボットが撮った子供たちとロボットが遊んでいる写真をユーザー が簡単に閲覧できるように,WebServerを構築した.ユーザーはIDとパスワー ドを入力することで特定の子供たちの写真を簡単に自宅やオフィスなどから 閲覧することが可能になった.
1.3 本論文の構成
本論文は,本章を含む全7章からなる.
第 1 章 序論
本論文の目的,概要および構成について述べる.
第 2 章 ロボット間通信について
本システムでの各ロボット間の通信について述べる.
第 3 章 ロボットの位置検出
本システムでのロボットの位置検出について述べる.
第 4 章 ロボットの自律行動
本システムでのロボットの自律行動について述べる.
第 5 章 WebServerの構築
本システムの構成とその処理について述べる.
第 6 章 システムの実験結果の評価・考察
本システムの実験結果を提示し,その考察を述べる.
第 7 章 結論
本論文のまとめと今後の課題を述べる.
第 2 章 ロボット間通信について
本章では,ロボット間通信の必要性及び実現方法,ロボット間通信によるイベント 検知の方法,位置情報の取得方法について述べる。
2.1 ロボット間通信について
本節では,ロボット間通信の必要性及び実現方法,ロボット間通信による写真撮 影要求とその処理,位置情報の取得方法について述べる。
2.1.1 ロボット間通信の必要性
報道記者ロボットは,子供がロボットと遊んでいることを検知する必要がある.
そこで,子供と遊んでいるロボットが報道記者ロボットに対して写真要求クエリー を送ることでロボットが子供と遊んでいることを報道記者ロボットに通知できる ようにした.また,ロボットの位置を計算する際に,報道記者ロボットの処理に負荷 をかけないために,サーバーを用意したそこで処理を行った.また,ロボット間通信 を使用して,指定したロボットの位置を取得できるようにした.
2.1.2 ロボット間通信の実現方法
各ロボットは,システム起動時に, サーバーと接続しJOINパケットを送信す る.JOINパケットとは,自分のタグのID情報と自分が報道記者ロボットか通常の ロボットかのフラグがついたロボットの情報を格納したパケットで,一番初めに使 用されるパケットである.ロボット間では,このJOIN パケットでサーバーに登録 したIDを元に各ロボットに命令を送ることが可能である.登録したIDを固定にし てするによって,各ロボットは相手先のIPを知っておかなくてすむ.また信頼性を 重視しTCP上に作成した.
2.1.3 写真要求クエリーとその処理
報道記者ロボットが子供と遊んでいるロボットの情報を取得するために, 各ロ ボットは子供を検知し遊んでいると判断したら,サーバーに写真要求クエリーを送 信する.サーバーは写真要求クエリーがきたらそのロボットの位置を予測し報道記 者ロボットに位置情報を教える.予測方法については次章で説明する. 報道記者ロ ボットはその位置情報を頼りに現場に向かい子供とロボットが遊んでいる写真を 取得する.各ロボットが同時に写真要求のクエリーを送信したときや, 報道記者ロ ボットがあるロボットを撮影中に他のロボットから写真要求のクエリーを送信され た場合,近い順に現場に行くようにした. ある現場に報道記者ロボットが向かって いる間にその現場より近い位置からの検出があった場合,より近い場所が優先され 目的地が変更される. また,移動中や他の子供を撮影中にロボットから子供がいな くなってしまう場合も考慮し,ロボット間通信を使用し状況を各ロボットに伝える.
第 3 章 ロボットの位置検出
本章では,ロボットの位置検出について述べる.
3.1 ロボットの位置検出
本節では,ロボットの位置検出の関連研究と本研究での手法について述べる.
3.1.1 関連研究
位置検出に関する2つの関連研究をあげ,それぞれの特徴と問題点をあげる.
RFIDを用いた人物の識別の研究
本節では,RFID を用いたロボットについての関連研究と問題点について述べ る.RFIDを用いたパートナーロボットの代表研究として,ATR 知能映像通信研究
所のRobovieがあげられる.Robovieでは,人にRFIDタグを持たせそれぞれの人
の識別を行っている.[4]Robovieでは,近づいてきた人を識別するにとどまっており それを元に近づいていくことはできない.また,RFIDでは方向を取得することがで きないため,人がどこから近づいてきたかを,判断することができない. 本研究で は,RFID受信機からロボットの位置予想座標を作成することで,方向や距離を取得 することが可能である.それによって,対象に近づくことも可能である.
画像処理を用いた複数ロボットの位置同定の研究
本節では,画像処理を用いた複数のロボットの位置同定に関する研究と問題点に ついて述べる.和歌山大学の加藤らは,全方向カメラを各ロボットにつけることで それらの画像から最適な相対的なロボットの位置関係を求めることに成功した.[5]
しかしながら,この研究では各カメラからそれぞれのロボットの位置が見えること が前提になっており,各ロボットの距離は画角にロボットと認識できる大きさで映 る範囲に収まらなくてはならず,探索の範囲はせまい. 本研究では,RFIDを使うこ とにより,カメラを使った探索範囲より広く探索することができた.
3.1.2 タグの検討
一般的なロボット検出としては,画像処理によるものが多い.しかし,画像処理の 場合,ロボットから見える視界は限られており,取得できる探索範囲はせまい. そ こで本システムでは,画像処理以外にもタグでのロボットの位置検出を行った. ロ ボットの位置の取得方法として、RFIDタグ(Passive型), RFIDタグ(Active型), 超音波タグなどが考えられる.それぞれのタグの特徴は以下のようになる.
1. RFID(Passive型)の特徴
受信範囲が狭く,志向性が強い.方向が取得できない.
2. RFID(Active型)の特徴
受信範囲が広く,志向性が弱い.方向が取得できない.障害物などに強い.
3. 超音波タグの特徴
受信範囲が広く,志向性が弱い.方向が取得できる.障害物などに弱い.
今回のシステムでの実行環境を想定すると,各ロボットの周りに子供が遊んでいる ので超音波タグでは子供達が障害物になり,うまく検出できない. またRFID(Passive 型)では、受信範囲が非常に狭いのでロボットの位置検出には向かない.そこで,本 システムでは障害物に強く受信範囲の広いRFID(Active型)を使用した.
3.1.3 RFID について
本システムで使用したRFIDについて述べる.
1. RFID送信タグの性能
(a) サイズ 60(W)x30(D)x10(T)mm (b) 本体重量 約15g(電池を含む)
(c) コイン電池CR2032使用時寿命約3年 (d) 温度:動作0〜60℃、保存-20〜-70℃
(e) ID送信間隔 最短0.2秒
(f) 最大ID数 約40億(A-Zのアルファベット7桁構成)
(g) 固有グループコード利用可能
(h) 発信周波数 300MHz帯 微弱無線対応,国内免許不要
図 3.1: RFIDタグ 2. RFID受信機の性能
(a) サイズ 127(W)x122(H)x38(D)mm (b) 本体重量 約500g
(c) AC電源駆動(100V-240V, 12DVC)
(d) ニッカドバッテリー内臓により電源瞬断対応(フル充電で4時間程度稼 動可能)
(e) 通信RS-232C, 19200bps
(f) アンテナ感度調整機能(8段階、コマンドにより遠隔設定可能)
(g) 高速同時複数タグ読み込み可能(DSP処理能力75ビーコン/秒)7秒 タグの場合約500個の処理が可能
図 3.2: RFIDリーダー
報道記者ロボットに受信機をとりつけ,RFID送信タグを各ロボットにとりつけ る. 図3.3は,ロボットにRFID受信機をとりけた図である.
3.1.4 RFID を用いた距離情報の取得
RFIDは受信感度を変えることにより受信範囲を変えることが可能である. そこ で,受信範囲と受信感度の関係を調べるため,RFID受信機で受信感度を1-7まで変 化させ,そのときのRFID送信タグの受信範囲を計測する実験を行った. また受信
図 3.3: RFID受信機と報道記者ロボット
表 3.1: RFIDの受信感度と受信範囲
機が送信タグを認識するまでの時間も計測した. 表3.1は受信範囲と受信感度を表 したものである.
表3.1のように受信感度を変えることにより受信範囲が変わる性質を利用してタ グとのある程度の距離を算出することが可能である.また受信感度を変えてからタ グを認識するまでに約300msecかかることが実験からわかった.受信感度5-8まで の距離がほとんど変わらなかったという事と,距離算出のリアルタイム性,また実 行環境の室内の大きさを考慮し受信感度1-4のみを使用した.
3.1.5 RFID を用いた方向の取得方法
本節では,RFIDを使ってどのように方向を取得方法と問題点,解決策について述 べる.
RFIDを用いた方向の取得方法
RFID受信機から取得できる情報はRFID送信タグが受信範囲内にいるかいな いかだけであり, 方向がわからない.そこでまず実世界にマッピングするRFID送 信タグの位置予想座標を作成し, RFID受信機で受信範囲内にタグがあることがわ かったら,その範囲内に対して予想座標点に図3.4のようにプロットする.次に報 道記者ロボットが動き,またRFID受信機で受信範囲を計測する.そして予想座標 に移動後のRFID受信機の受信範囲ないの予想座標点にプロットする.図3.5のよ うに,移動する前の円内と移動後の円内に同時みたす範囲(この場合二つの円が重 なった部分)にタグがあることが予想される.
問題点
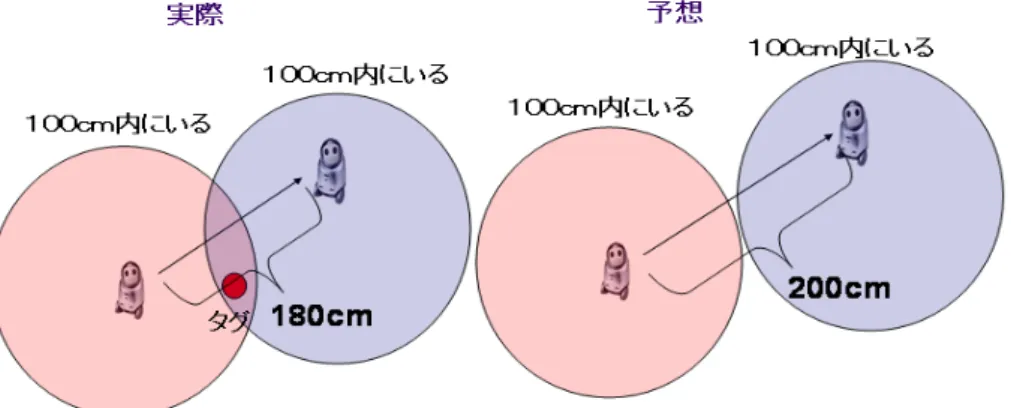
前節で説明したように,ロボットの動いた距離と,RFIDで取得した情報を保存し ていくことで距離情報から方向を予測することが可能である.しかしながら,ロボッ トは必ずしもハードウェアの性能上,正確な距離を移動することができず,環境に 大きく左右される.したがって,実際は100cm進もうとしても80cmしか進まなかっ たということが起こりうる.これにより相手先を見失しなう可能性がある. 図3.6 では、実際の動いた距離との誤差によって相手先を見失ってしまう例である.図3.6 の左の図では実際100cm進もうとしたが80cmしか進まずそれによって,移動後に もタグを検出している例を表している.右の図は予想座標を表す図である.移動前 にタグを検知しさらに移動後にもタグを検知し円を描いているがロボットが予定 よりすすまなかったために,タグを検知しているため予想座標に,移動前の円と移 動後の円が重ならなくなり,検出できなくなっている.
図 3.4: 予想座標
図 3.5: RFIDを用いた方向の取得
図 3.6: RFIDを用いた方向取得の問題点 解決策
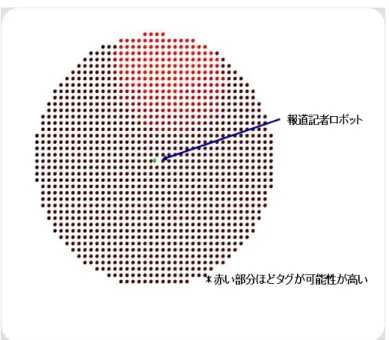
前節で説明したように,RFIDによる方向の取得ではロボットが正確な距離を移 動することができずに見失う問題がある.そこでこの問題を解決するために重みづ けを行った.重み付けとは予想座標の各座標点にweightという値を持たせ,一度検 出された円内の座標のweightの値を1ずつ大きくしていく方法である.また最近 取得したRFID取得情報から描かれた円内に入らない座標点のweightは0になる.
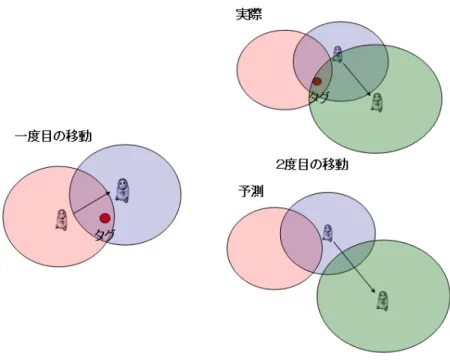
なぜならば, 最近得たRFIDの情報はロボットによる誤差はなく,その円以外にタ グが存在する可能性がないからである. 図3.7は報道記者ロボットが2度動いたと きに重み付けを行った方向取得の例である.図3.7の左の図は,1度目の移動を表 しており右上の図は,2度目の移動を表している.右下は2度の動作での予想座標 を表している.このとき2度目動作が予定より短く動いたためタグを検知してしま い,予想座標では1度目,2度目,3度目の検出で描かれた円が全て重なる点がなく なり,見失いがおきている.しかし,重み付けを行うと最終的に2度目の円と3度目 の円の重なった部分のweightが2になり,3度目に描かれた部分のweightが1,そ れ以外が0となり,weightが2の部分に対象のタグがあると予測される.重み付けを 行った場合は,前節で説明した見失いの問題が解消される.また予想座標は,GUIと しても表すことができ検出状態を確認することが可能である.weightが高いほど赤 くなる.
図 3.7: 重み付けを行った方向取得 RFIDの感度変化による位置予測
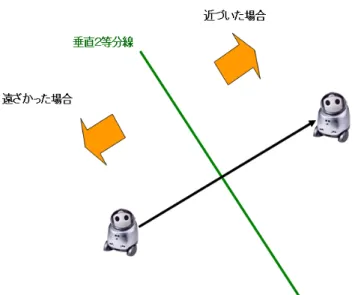
本研究では RFIDの感度変化からの位置予測を行うことで精度の向上を行っ た.RFIDの受信感度変化とはRFIDの受信感度が1→2や,5→4などのRFID の受信感度の変化をさす.たとえば,1→2になったとき,対象のタグから遠ざかっ たと判断でき,また5→4のときは対象のタグに近づいたと判断することができる.
そこで,移動前と移動後の座標とRFIDの受信感度を比べる.このとき移動前後に かけて受信感度の変化があったときは,移動前と移動後の2つの座標から,2点の 垂直2等分線を引き,図3.8のように近づいた場合は,進行方向側の予想座標点に対
してweightを1増加させ,遠ざかった場合は,進行方向の逆側の予想座標点に対し
てweightを1増加させる.
図 3.8: RFIDの感度変化による位置予測
3.1.6 画像によるフィードバック
本研究では,早稲田大学村岡研究室所属の草山氏による画像によるロボット検出 システムを利用し,それを予想座標にフィードバックを行った.
画像によるロボット検出方法
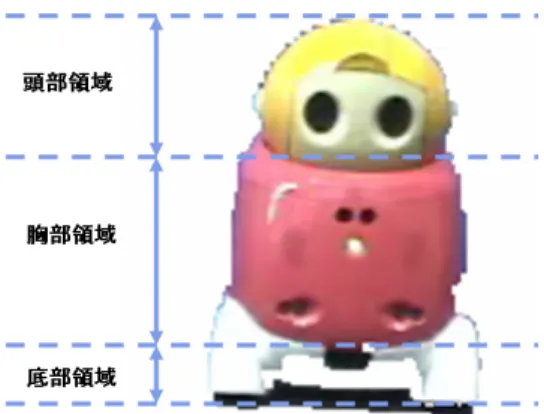
ロボット検出及びロボット領域抽出は,色情報を用いて行う.ロボットの各部分を 図3.9のように呼ぶことにする.画像によるロボット検出を行う前に予め検出する ロボットの胸部部分の色情報を計測し保持しておく必要がある.まず始めにこの色 情報を用いて胸部領域の候補を検出する.その後,検出された胸部領域候補各々に 対して距離の計測を行い,その距離値からロボットの領域を算出する.最後に,実際 の領域の大きさが,距離から算出されたロボットの大きさならばその領域をロボッ ト領域と判断し,そうでなければ,ロボット領域でないと判断する. [6]
フィードバックによる重み付け
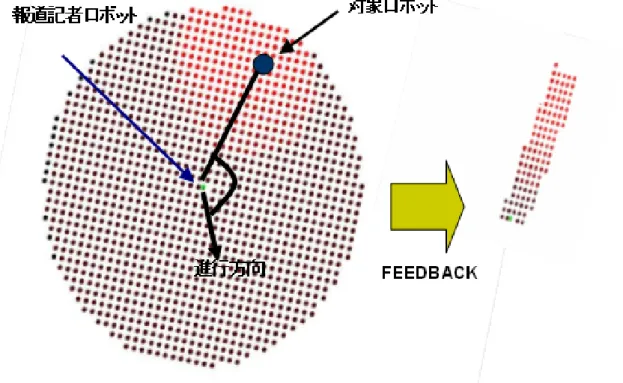
画像処理によりロボットを発見した場合は報道記者ロボットから見てどの角度 に何色のロボットがいたということをサーバーに通知する.サーバーでは,あらか じめRFIDのタグ情報とサーバーの色情報のリストを持っていて,最も予想位置が 近く,かつ色情報が一致しているロボットに対してフィードバック処理を行う.こ の時,同じ色のロボットが近くに複数いる場合はフィードバック処理を行わない.
図 3.9: ロボットの領域分割
フィードバック処理では,予想座標に対して図3.10のように対象ロボットとの角度 だけ長方形を回転させ,回転後の長方形内の座標データだけ重みづけを行い,それ 以外の座標データはweightを0にする.
3.1.7 位置予想アルゴリズム
重み付けされた位置情報から最終的にどのようにロボットの位置を予測するか を述べる. 本システムでは,複数のアルゴリズムから使用するアルゴリズムを環境 変数から選択できるように設計した.現時点で用意されているアルゴリズムを以下 に述べる.また,新しいアルゴリズムを簡単に追加することが可能である.
1. 重みがもっとも高い点のみを平均して,予想座標を求める.
2. 重みにたいし,係数(指定可能)をかけたものを平均して予想座標を求める。
3. 重みに対し,二乗したものを平均して予想座標を求める。
実験の結果,重みがもっとも高い点のみを平均して予想座標を求める方法が最も 精度がよかったため本システムではそのアルゴリズムを採用した.
図 3.10: 画像による予想座標のフィードバック
第 4 章 ロボットの自律行動
本章では,本システムでの報道記者ロボットの自律行動について述べる.
4.1 ロボットの自律行動
ロボットの位置を検出するために報道記者ロボットは部屋を自律的に行動し, そ れぞれのロボットの位置を把握しておいたほうが効率がよい.本節では,自律行動 をする際の問題点とその解決策について述べる.
4.1.1 ロボットの自律行動における問題点
室内には人間や他のロボット,壁といった様々な障害物があることが予想される.
報道記者ロボットが室内を巡回するにあたってこれらを検知しないと,障害物にぶ つかってしまう.
4.1.2 解決策
障害物の問題を解決する手段として 1. 画像処理による障害物回避 2. センサーによる障害物回避
の2つがあげられる. PaPeRoには,外界センサーとして,超音超センサーが前方, 右前,左前,後方,下方の5個つけられている. それぞれの超音波センサーからは,障 害物までの距離を取得することができる. また,最大測定距離はおおよそ10cmで ある.
4.1.3 ロボットの自律行動
報道記者ロボットの自律行動では,前節で説明した超音波センサーで, 前方に障 害物を検知した場合,右前,左前のセンサーを使い,障害物までの距離が大きい方向
知した場合は,先ほど回転した方向にさらに回転する.ここでセンサーを使って回 転先をきめないのは,センサーによる無限ループをさけるためである.たとえば,セ ンサーを使って先ほど回転した方向と逆に回転すると,もとの位置に戻る.そして また同じ方向に回転するという無限ループが発生する. また,画像処理を有効に活 用するために,首を振りながら自律行動をする.これによって視野が広がるので,画 像によるロボットの検知の効率がよくなる.
第 5 章 Web サーバの構成と処理
本章では,Webサーバの構成と処理について述べる.
5.1 Web サーバの構成
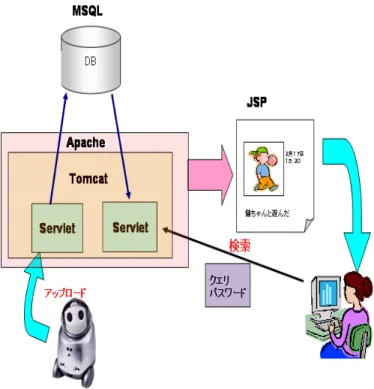
図5.1はWebサーバの構成を示している. WebサーバにApacheを使用し,プラ グインとしてTomcatを使用した.写真や,ID,パスワードなどのデータをMysqlを 使用して管理した.ユーザーはTomcat上で動作するサーブレットとJSPを利用し て特定の写真を閲覧する.
図 5.1: Webサーバの構成
5.2 Web サーバの処理
第1にユーザーは,写真をとってもらう前にデータベースにユーザー名とパスワー ドを登録する. 次に報道記者ロボットは,写真を撮るとWebサーバのImageUpload サーブレットにアクセスする.そして,POSTメソッドを用いてユーザー名と写真の バイナリーデータを送信する. サーブレットでは,データを全て受信すると,ユー ザー名でデータベースを検索しユーザー名の登録があったら受け取った時の日付 と時間を取得し,日付,時間,写真のバイナリーデータをデータベースに保存する.
ユーザーからのアクセスがあるとIDとパスワードを要求する図5.2を出力する.
サーバーでは,検索ボタンが押されるとユーザー名をキーにデータベースを検索し, パスワードが一致したら写真を提示するJSPを作成する.図5.3は検索結果の画面 である.また図5.3の下のほうの矢印ボタンを押すことで写真を切り替えることが 可能である.
図 5.2: 写真検索画面
図 5.3: 検索結果画面
第 6 章 システムの実験結果の評価
本章では,本研究で実装したロボットの位置検出の実験について実験環境,結果, 評価について述べる.
6.1 実験環境
実験環境は,縦6m横4mの室内で,報道記者ロボットが1台,対象ロボットを2 台用意した。実験では,報道記者ロボットを起動しすぐに対象ロボットから写真要 求クエリーを発行し,報道記者ロボットを呼び寄せる.そこから報道記者ロボット が対象ロボットを検出するまでの時間と検出率を測定する. このとき,3分以内に 対象のロボットを検出できないときは,タイムアウトとし検出失敗とする.対象ロ ボットと報道記者ロボットとの位置関係は対象ロボットが報道記者ロボットの前 方,後方,障害物に隠れている状態,ランダムの4パターンを用意しそれぞれ, 10回 ずつ測定を行った.
6.2 実験の結果
実験結果を表6.1に示す.平均検出時間は51秒で,報道記者ロボットと対象ロボッ トの初期位置の平均距離は4mだった.
表 6.1: 実験結果
6.3 評価・考察
実験では,報道記者ロボットの前方に対象ロボットを置いたとき100%の確率で 認識することができた.また,後方においたときは,自律行動で前進して一時は離れ てしまうが,RFIDによる方向取得によって遠ざかったと判断し,すぐに後方を探索
し90%の確率で検出することができた.視界に入らない後方を探索できたことで
RFIDによる方向の取得の有効であるとわかった. 障害物をはさむ場合では4割ほ どしか検出することができなかった. しかし,対象のロボットの近くにはいくこと ができた.最終的に検出できなかった理由としては対象ロボットの近くにはいくも のの最終的に画像処理によって,ロボットがいると判断するため,障害物で対象ロ ボットをみずらくなり,最終判断ができなくなりタイムアウトがおきたと考えられ る. この対処法として,障害物に対して回り込む処理が必要と考えられる. 全体的 評価としては,80%の確率で対象ロボットを検知することができた.本システムでの ロボット検出が有効であることがわかった. また,検出速度は,およそ秒速7.8cm だった.ロボットの最大速度は秒速20cmであることから,直線的に対象ロボットへ 接近するときに比べ,約2/5の速度だということがわかる. 今後,いかに秒速20cm に近づけるかが課題となる.
第 7 章 結論
本章では,本論文のまとめと本論文で提案したシステムの今後の課題を述べる.
7.1 まとめ
本論文では,報道記者ロボットを実現するための,解決すべき問題を提起し,そ の解決法および本システムの実装法について論じた.そして,評価実験を行い,本 研究の有用性を示した.
第 2 章では,ロボット間通信について述べた.
第 3章では,ロボットの位置検出について,関連研究と本研究での手法を述べた.
第 4 章では,ロボットの自律行動について述べた.
第 5 章では,ウェブサーバーの構成および処理を述べた.
第 6 章では,評価実験を行ない,実験結果について考察し,本システムの有用 性を述べた.
7.2 今後の課題
本論文で提案したシステムにおいて,今後解決すべき課題として以下の点が挙 げられる.
1. 速度の向上
現在,自律行動でのロボットの動作は,超音波センサーの関係から10cm ずつ しか進むことができない.それによって,対象ロボットから写真要求クエリー がきてから,対象ロボットの位置まで移動するときに,時間がかかってしまう.
これにより,対象ロボットの前の子供がいなくなるという現象が起こりやす くなってしまう.これを解決するために,超音波センサーだけでなく画像処理 による障害物回避を行う必要がある.
2. 障害物の回りこみ
前章でも述べたが,対象ロボットが障害物に囲まれている場合,障害物を的確 に認知し,障害物を回りこむ処理が必要になる.それにより,対象ロボットを 検出する精度を向上する必要がある.
3. ウェブサーバーのコンテンツの向上
現システムでは,ウェブサーバで報道記者ロボットが撮影した写真しか閲覧 することしかできない.今後,写真に対するコメントを自動生成し写真ととも に掲載させたり,音声や動画なども取得できウェブサーバーにアップしたり することで,より面白いウェブページを作成したい.
今後は以上の課題に取り組み,より有用なシステムの開発を行なう.
謝辞
本研究を行なう機会を与えて頂き,また,研究の全過程を通して日頃より暖かい 御指導を賜った 村岡 洋一 教授に心より感謝の意を表します.また,研究を行うに あたりご協力いただきましたNECマルチメディア研究所ロボット開発センター の皆様に感謝致します。そして,最後に,公私に渡る様々な相談相手となって頂 いた,MCEメンバー,及び村岡研究室の先輩方,同期の友人たちに厚く御礼を申し 上げます.
参考文献
[1] 森中崇允,”報道記者ロボットシステムの開発−周回経路選択、撮影地点変更、
構図変更動作”,2004年度修士論文
[2] NEC PAPERO http://www.incx.nec.co.jp/robot/robotcenter.html (2005年1 月9日アクセス)
[3] 藤田善弘,”パーソナルロボットR100”,日本ロボット学会誌Vol.18 No.2,pp198- 199 2000
[4] 神田崇行,平野貴幸,ダニエル イートン,石黒浩, “日常生活の場で長期相互作 用する人間型対話ロボット,”日本ロボット学会誌, Vol.22, No.5, pp. 636-647, 2004
[5] 加藤 浩仁,石黒 浩,マシュー バース, ”全方位視覚センサをもつ複数ロボッ トの同定と位置決め”, 電子情報通信学会論文誌, Vol.J84-D2,No.7, pp.1270- 1278,Aug.2001
[6] 草山広丞,”固有空間照合法による被写体ロボットの姿勢検出-報道記者ロボッ トシステムにおける写真撮影機能の開発-”,2004年度修士論文