修 士 学 位 論 文
題 名
誘 電 泳 動 デ バ イ ス に お け る 微 粒 子 捕 集 特 性 の 数 値 検 証
指導教授 内田 諭 准教授
平成 27 年 2 月 19 日 提出
首都大学東京大学院
理工学研究科 電気電子工学 専攻
学修番号 13882302
目 次
第
1
章 序章1
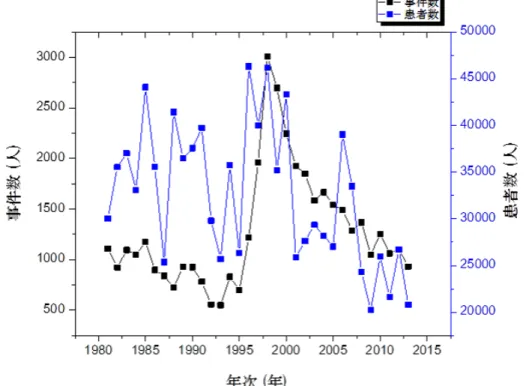
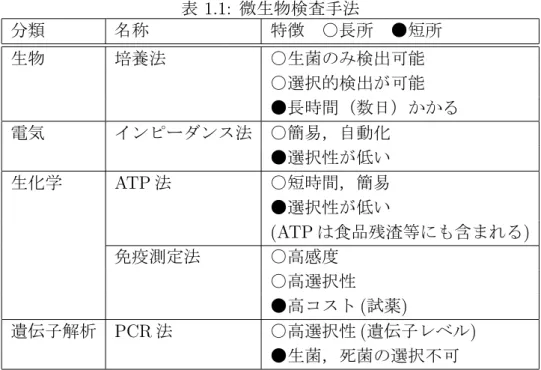
1.1 研究背景 . . . . 1
1.2 関連研究 . . . . 4
1.2.1 粒子軌跡計算及び分離プロセスの数値解析 . . . . 7
1.2.2 様々なデバイス構造での数値解析 . . . . 11
1.2.3 本研究室における先行研究 . . . . 13
1.3 研究目的 . . . . 14
第
2
章 解析方法15 2.1 解析モデル . . . . 15
2.2 力学的作用 . . . . 19
2.2.1 誘電泳動力 . . . . 19
2.2.2 抗力 . . . . 23
2.2.3 流体圧力 . . . . 24
2.2.4 重力及び浮力 . . . . 26
2.2.5 ブラウン運動力 . . . . 27
2.3 解析条件 . . . . 28
2.4 支配方程式 . . . . 31
2.5 計算手法 . . . . 32
第
3
章 捕集空間における電界及び誘電泳動力精査33 3.1 電界の空間分布 . . . . 33
3.2 誘電泳動力の空間分布 . . . . 37
3.2.1 | F DEP, x | の空間分布 . . . . 37
3.2.2 | F DEP, y | の空間分布 . . . . 40
3.3 | F DEP, y | の構造特性 . . . . 43
3.3.1 | F DEP, y | の高さ方向に対する変化 . . . . 44
3.3.2 | F DEP, y | の電極幅依存性 . . . . 45
3.3.3 | F DEP, y | の電極間隔依存性 . . . . 47
3.4 まとめ . . . . 49
第
4
章 捕捉粒子数の導出50
4.1 粒子軌跡 . . . . 50
4.2 粒子捕捉可能高さ . . . . 56
4.3 粒子捕捉所要時間 . . . . 57
4.4 電極面到達粒子数 . . . . 58
4.5 実験との比較 . . . . 59
4.6 有効領域比による補正 . . . . 61
4.7 捕捉粒子数 . . . . 65
4.8 まとめ . . . . 66
第
5
章 粒子捕集特性の流量依存性67 5.1 粒子軌跡の変化 . . . . 67
5.2 粒子捕捉可能高さの変化 . . . . 69
5.3 有効領域比の変化 . . . . 70
5.4 捕捉率及び捕捉粒子数の変化 . . . . 71
5.5 まとめ . . . . 73
第
6
章 解析精度向上の検討74 6.1 時間刻み幅の検討 . . . . 74
6.1.1 緩和時間 . . . . 74
6.1.2 時間刻み幅の比較 . . . . 76
6.1.3 粒子捕捉可能高さの比較 . . . . 79
6.2 空間刻み幅の検討 . . . . 79
6.2.1 粒子速度の検討 . . . . 79
6.2.2 粒子捕捉位置の比較 . . . . 82
6.3 まとめ . . . . 83
第
7
章 粒子種及び解析条件の拡張による粒子捕集特性の変化84 7.1 粒子軌跡の変化 . . . . 84
7.2 粒子捕捉可能高さの変化 . . . . 87
7.3 まとめ . . . . 88
第
![図 1.2: 各高さにおける誘電泳動力の分布 [17]](https://thumb-ap.123doks.com/thumbv2/123deta/10130876.1964764/8.892.255.627.228.499/図12各高さにおける誘電泳動力の分布17.webp)
![図 1.4: Clausius-Mossotti 関数の粒子導電率及び周波数依存性 [17]](https://thumb-ap.123doks.com/thumbv2/123deta/10130876.1964764/9.892.167.703.402.818/図14ClausiusMossotti関数の粒子導電率及び周波数依存性17.webp)
![図 1.7: 電極間隔による粒子捕捉距離の変化 [18]](https://thumb-ap.123doks.com/thumbv2/123deta/10130876.1964764/11.892.268.618.545.827/図17電極間隔による粒子捕捉距離の変化18.webp)
![図 1.12: 粒子凝集性能の比較 [22]](https://thumb-ap.123doks.com/thumbv2/123deta/10130876.1964764/15.892.211.676.287.797/図112粒子凝集性能の比較22.webp)
![図 2.5: 均一電界中における分極及び粒子に働く力 (a):Re[K(ω)] > 0, (b):Re[K(ω)] < 0](https://thumb-ap.123doks.com/thumbv2/123deta/10130876.1964764/24.892.205.687.160.841/図25均一電界中における分極及び粒子に働く力ω>ω<.webp)
![図 2.6: 不均一電界中における分極及び粒子に働く力 (a):Re[K(ω)] > 0, (b):Re[K(ω)] < 0](https://thumb-ap.123doks.com/thumbv2/123deta/10130876.1964764/25.892.202.685.176.824/図26不均一電界中における分極及び粒子働く力ω>ω<.webp)
