ENAA2008 -
プ 3平成20年度
産業用電力系統における系統安定化技術に関する 調査研究報告書
財団法人 エンジニアリング振興協会
平成21年3月
この事業は、競輪の補助金を受けて 実施したものです。
http://ringring-keirin.jp/
序
本 報 告 書 は 、 財 団 法 人 J K A か ら 機 械 工 業 振 興 資 金 の 補 助 を 受 け 、 財 団 法 人 エ ン ジ ニ ア リ ン グ 振 興 協 会 が 実 施 し た 平 成 2 0 年 度 「 産 業 用 電 力 系 統 に お け る 系 統 安 定 化 技 術 に 関 す る 調 査 研 究 」 の 成 果 を 取 り ま と め た も の で あ り ま す 。
本 調 査 研 究 で は 、 誘 導 電 動 機 が 大 半 を 占 め る 負 荷 系 統 と 自 家 用 発 電 設 備 及 び こ れ ら と 連 系 さ れ る 電 力 会 社 の ネ ッ ト ワ ー ク か ら 構 成 さ れ る 工 場 等 の 産 業 用 電 力 系 統 を 対 象 と し て い ま す 。 こ れ ら 産 業 用 電 力 系 統 は 、 自 系 の 事 故 の み な ら ず 、 電 力 会 社 の 事 故 の 影 響 を 受 け て 変 動 し 、 時 に は 工 場 全 停 電 に 至 る こ と が あ り ま す 。 こ う し た 操 業 停 止 は 数 年 ~ 十 年 程 度 の 頻 度 で 発 生 し 、 一 回 当 り 数 ~ 数 十 億 円 の 損 失 に 及 ん で お り 、 経 営 的 に も 大 き な 損 失 と な り ま す 。一 方 で 、産 業 用 電 力 系 統 は 、複 雑 化 、大 容 量 化 し て お り 、 全 停 電 の 原 因 と な る 電 力 系 統 の 変 動 の 解 析 を 難 し く し て い ま す 。 こ の よ う な 問 題 に 対 し 、 数 理 モ デ ル を 構 築 し て 解 析 し 、 対 策 を 設 計 手 法 と し て 確 立 す る こ と を 目 的 に 調 査 研 究 を 行 い ま し た 。
当 協 会 は 、 創 立 以 来 、 社 会 ・ 経 済 の 変 化 の 様 相 を 見 定 め な が ら 、 エ ン ジ ニ ア リ ン グ 及 び エ ン ジ ニ ア リ ン グ 産 業 の 新 し い 活 躍 の 可 能 性 を 求 め 、 地 球 環 境 の 保 全 、 資 源 エ ネ ル ギ ー の 有 効 利 用 、 社 会 資 本 の 充 実 、 地 域 の 活 性 化 等 幅 広 く 社 会 開 発 型 シ ス テ ム 関 連 の テ ー マ を 選 定 し 、 産 学 連 携 の も と 、 当 協 会 の 研 究 開 発 企 画 委 員 会 に 技 術 テ ー マ 別 研 究 会 等 を 設 置 し て 、 調 査 研 究 を 推 進 し て お り ま す 。
本 事 業 は 、 こ の 研 究 開 発 企 画 委 員 会 の 活 動 の 一 環 と し て 、 学 識 経 験 者 及 び 関 連 の 専 門 家 か ら な る 研 究 会 ( 委 員 長 : 三 谷 康 範 九 州 工 業 大 学 大 学 院 工 学 研 究 院
電 気 電 子 工 学 研 究 系 教 授 ) を 編 成 し 、 調 査 研 究 を 実 施 し た も の で あ り ま す 。 な お 、 本 調 査 研 究 の 取 り ま と め に 当 た っ て は ( 出 光 エ ン ジ ニ ア リ ン グ ( 株 )) が 中 心 と な っ て 行 い ま し た 。
こ の 事 業 に ご 協 力 い た だ い た 関 係 各 位 に 対 し 心 か ら 謝 意 を 表 す る と と も に 、 本 報 告 書 の 成 果 が 各 方 面 で 有 効 に 活 用 さ れ る こ と を 切 望 す る 次 第 で す 。
平 成 2 1 年 3 月
財 団 法 人 エ ン ジ ニ ア リ ン グ 振 興 協 会 会 長 増 田 信 行
産業用電力系統安定化技術研究会 委員名簿
(順不同、敬称略)
委員長 三谷 康範 九州工業大学 大学院工学研究院 電気電子工学研究系 教授 委員 瓜生 芳久 成蹊大学 理工学部 エレクトロメカニクス学科 教授
渡邊 政幸 九州工業大学 大学院工学研究院 電気電子工学研究系 准教授 壹岐 浩幸 成蹊大学 理工学部 客員研究員
浦野 恭博 出光エンジニアリング(株) 技術部 上席主任部員 浅井 崇 出光興産(株)千葉製油所 千葉工場 電気計装課 研究員 奥田 隆英 出光エンジニアリング(株) 技術部
事務局 大野 宣夫 (財)エンジニアリング振興協会 技術部長
石瀬 俊明 (財)エンジニアリング振興協会 技術部 研究主幹
目 次
序文
研究会 名簿 目次
はじめに
1 本調査研究の目的と今年度の計画 ... 1
1.1 本調査研究の目的の要旨 ... 1
2 全体計画と平成 20
年度の計画 ... 22.1 全体計画 ... 2
2.2 平成 20
年度の計画... 3
第1章 自家用ガスタ-ビン発電機モデルの構築
1.1 はじめに ... 4
1.2 研究対象とした産業用蒸気タービン発電機の特徴 ... 4
1.2.1 事業用・産業用蒸気タービン発電機および電力系統の特徴の違い ... 4
1.2.2 対象とした蒸気タービン発電機の詳細 ... 6
1.2.3 蒸気タービン発電機の蒸気飲み込み量と発電出力 ... 8
1.3 研究対象とした発電機の励磁系を含んだ AVR
について ... 91.3.1 発電機励磁回路および AVR
の構成 ... 91.4 Matlab / Simulink
を用いた蒸気タービン発電機ガバナモデルおよび ガスタービン発電機AVR
モデルの構築 ... 131.4.1 蒸気タービン発電機ガバナ簡易モデルと詳細モデル ... 13
1.4.2 両モデルによる蒸気タービン発電機の負荷遮断時の応答比較 ... 14
1.4.3 ガスタービン発電機の標準・詳細 AVR
モデルによる三相短絡時の応答比較.... 17
第2章 誘導電動機群の縮約方法の検討
2.1 はじめに ... 20
2.2 誘導電動機の縮約方法 ... 20
2.2.1
解析に必要となる誘導電動機のデータ ... 202.2.2 「定格出力」の縮約方法 ... 22
2.2.3 「力率」の縮約方法 ... 22
2.2.4 「効率」の縮約方法 ... 23
2.2.5 「極数」の縮約方法 ... 23
2.2.6 「GD
2(電動機+負荷)」の縮約方法 ... 242.2.7 「すべり」,「始動トルク」,「最大トルク」の縮約方法 ... 24
2.2.8 「始動電流」の縮約方法 ... 25
2.2.9 「負荷トルク特性」の縮約方法... 25
2.3 縮約方法の検証 ... 27
2.3.1 検証方法 ... 27
2.3.2 誘導電動機2台の縮約 ... 27
2.3.3 誘導電動機3台の縮約 ... 30
2.3.4 誘導電動機7台の縮約 ... 37
2.4 まとめ ... 41
第3章 三相短絡事故時におけるタービン発電機応答解析
3.1 はじめに ... 42
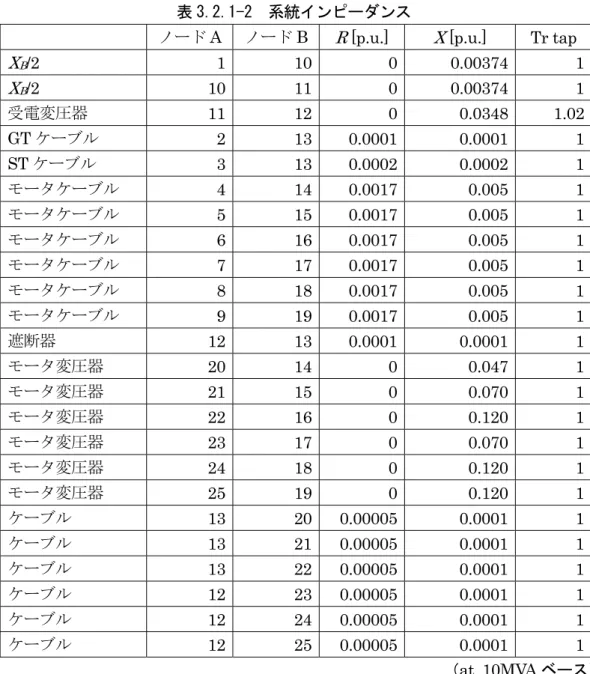
3.2 適用した産業用電力系統モデル ... 42
3.2.1 受電系統とタービン発電機モデルと負荷モデル ... 42
3.2.2 電力潮流バランスと事故点 ... 50
3.3 三相短絡事故時におけるタービン発電機応答解析 ... 50
3.3.1 簡易・詳細ガバナモデルによる解析 ... 50
3.3.2 簡易(AVR
は標準)・詳細モデルによる解析結果の比較と考察 ... 733.4 電力系統解析結果の設計への反映 ... 74
第4章 まとめと今後の課題
4.1 調査研究の成果 ... 77
4.2 今後の課題 ... 82
4.3 対外発表 ... 83
はじめに
1 本調査研究の目的と今年度の計画
1.1
本調査研究の目的の要旨最初に、昨年度の報告書の冒頭の「はじめに」で述べた本調査研究の目的について要旨を述べる。
産業用電力系統は、複雑化・大容量化の一途をたどりトラブルの影響範囲が拡大していること、トラ ブル防止のためには、従来以上に高度な系統連系技術が求められ、中でも産業用電力系統のふるまいを 把握する電力系統解析が必要不可欠な技術となっていること、しかしながら、産業用電力系統解析には タービン発電機や負荷の適正モデルの構築方法の確立が必要なこと、同様に解析精度の評価、体系化な ど課題が多く、これらを解決する研究が求められており、このことから本調査研究に取り組む。
産業用電力系統の特徴と系統連系技術上の課題は、
(1)発電機容量は負荷容量相当かそれ以下であることが一般的である。すなわち、発電機容量に余裕が 無い中で、短絡事故等の外乱から発電機をどのようにして安定させるかが重要となること
(2)産業用タービン発電機は、蒸気系統の制御も合わせて行っており、特に蒸気タービン発電機のガバ ナは、出力や周波数以外の制御要素を有している。これらを系統解析モデルに組み込み、産業用電 力系統解析の解析精度を向上させる必要があること
ガバナ:調速機:タービン入力エネルギーを調整するバルブ (3)同様に自動電圧調整器(Automatic Voltage Regulator、以下「AVR」)を含めた励磁制御を精度
良く系統解析モデルに組み込み、産業用電力系統解析の解析精度を向上させる必要があること (4)負荷が誘導電動機群であり、短絡事故などの外乱による系統擾乱時はすべりを大きく変化させるも
のの、系統から離脱することはなく系統の動揺を拡大する方向に作用する。この誘導電動機群は数 千台であり、個々を産業用電力系統解析に組み込むことは事実上困難であり、負荷の特徴を等価的 に縮約モデルに表現して系統解析に組み込むことが重要であること
縮約:複数台の誘導電動機を1台の電動機モデルで等価的に表現すること (5)上記の不安定な要因を持つ反面、受電系統異常時は系統から切り離れて発電機群だけで可能な限り
の多くの負荷に給電することが求められる。すなわち、系統解列は事業用発電機のように発電機用 遮断器の開放ではなく、受電系統との連系用遮断器の開放であり、負荷に給電したまま系統を安定 させなければならない。このため、解析精度を上げて供給可能な限界量を見出すことが重要である こと
などに整理でき、本調査研究では、解析のための諸要求のうち「発電機制御モデルの詳細性の見極めと 誘導電動機の系統への影響の把握と負荷群モデルの等価方法」を目的として調査研究を進めることとし た。研究のフレームを図 1-1 に示す。
タービン発電機制御モデルの必要詳細モデルの見極めについては、ガバナモデルとAVRを含めた励 磁制御モデルの両方が対象となる。ガバナモデルについては産業用電力系統で多く採用されているガス タービン発電機ガバナと蒸気タービン発電機ガバナを調査研究対象とする。
また、系統解析の精度向上方策など解析技術上の課題を主とした調査研究ではあるものの、系統解析 技術が系統設計に適用されてこそ調査研究の成果であり、適用の観点から解析結果の検証方法と電力系 統の問題点の対策検討への適用方法についても簡単に触れることとした。なお、本調査研究については 本報告書に加えて、学会等での発表を行うことにより公知化を図りたいと考えている。
図 1-1 産業用電力系統における系統安定化技術の研究フレーム
2 全体計画と平成 20 年度の計画
本調査研究は平成19年から2年間にわたり取り組んでおり、全体計画と平成20年度の計画につい て紹介する。
2.1 全体計画
1)タービン発電機の制御モデルと負荷モデルの調査研究
昨年度の報告書で、以下の項目に取り組むことを述べた。各項目の選定理由と目的については、昨 年度の報告書に記載しているので割愛する。
(1)ガスタービン発電機のガバナモデルの調査研究 (2)蒸気タービン発電機のガバナモデルの調査研究 (3)励磁制御モデルの調査研究
(4)誘導電動機モデルの調査研究
2)電力系統解析の実施
本調査研究により、必要なタービン制御の詳細モデルと誘導電動機の等価縮約等の表現方法を個々 にあきらかにするが、これらを解析ツールに組み込み電力系統全体の挙動を解析し、従来のモデルと の比較を行い、有効性を検証する。
(Ⅰ)産業用電力系統の大容量化によるトラブル影響の拡大 経済・社会的背景
→信頼性要求の高まり (Ⅱ)電力自由化等、規制緩和
→産業用電力系統技術高度化の必要性
②系統容量増加は複雑化を伴い、過渡現象も複雑化 大半で、固有の過渡現象が発生
現状
①産業用電力系統は、自家用発電設備並びに電動機負荷が →固有の安定化技術が必要
産業用電力系統の安定化技術は未確立。
一方で産学連携の高まり
3.調査研究内容 2.ねらい
1. 目 的 電力過渡現象による産業用電力系統の諸トラブル防止
電力機器の数理モデルを構築してシステム解析し、対策を設計手法として確立 調査研究
解決策の検討
①問題点の分類と検討方針の策定
②産業用電力系統安定度解析ツールの検証
(タービン発電機詳細制御モデルの構築)
③産業用電力系統の問題点の対策検討
④産業用電力系統解析を用いた対策検証
⑤対策案と検証方法を設計手法として確立
⑥解析ツールの評価、解析結果、設計手法を整理し公知 実態把握
問題点の抽出
*合致したトラブル情報が 文献調査結果の分析 各種論文調査
判明すれば調査・分析
2.2 平成 20 年度の計画
平成 20 年度の取り組みは以下である。
1)タービン発電機制御モデルの必要詳細モデルの見極め
ガバナ制御の詳細モデルの検討は、本年度は蒸気タービン発電設備に取り組む。本調査研究に当た っては、昨年同様、実系統に組み込まれた蒸気タービン発電設備の実運転データを提供できる環境に あり、ガバナモデルの精度について実機を用いて検証を行った。具体的には
(1)蒸気タービン詳細モデルの構築
ガバナ制御モデルとバルブ動作を含めた蒸気タービン本体モデルの構築 (2) 系統解析ツールへの組み込みによる検証
外乱として負荷遮断を対象にして、詳細モデルによる負荷遮断の解析データと実負荷遮断データ との比較検証
2)誘導電動機の負荷群モデルの縮約方法の検討
昨年度は、短絡事故による電圧降下時、誘導電動機が回転数を低下させる諸要因とその影響度を 見極めた。今年度は、諸要因を元に縮約方法について検討し、解析ツールを用いながら評価した。
3)短絡事故解析による簡易モデルと詳細モデルの精度比較検証
昨年度実施したガスタービン発電機モデル及び今年度実施した蒸気タービン発電機モデルを組み 込むとともに、縮約化した電動機モデルにより電力系統を模擬し短絡事故時の電圧安定度解析を実 施した。その結果を元に、必要モデルについて考察するとともに、系統解析を用いた電力系統の設 計手法について整理した。
研究の全体計画と平成20年度の研究範囲を図 2-1に示す。
平成20年度は、網掛け部を実施した。
平成20年度計画は網掛け部 図 2-1 調査研究の全体計画と平成20年度の調査研究範囲
縮約方法の検討と 解析による検証
電力系統解析による評価・検証全モデルを組み込んだ
解析による 単機機器毎の検証
単機機器毎の検証 解析による
解析による 単機機器毎の検証 蒸気タービン発電設備
詳細ガバナ制御モデルの作成・検証 ガスタービン発電設備
詳細ガバナ制御モデルの作成・検証
タービン発電設備
詳細励磁制御モデルの作成・検証
誘導電動機の電圧不安定化 要因と影響度の解析・評価
基礎調査
第 1 章 自家用蒸気タービン発電機モデルの構築
1.1 はじめに
産業用電力系統に採用される発電設備には、ガスタービン発電機や蒸気タービン発電機があり、
本調査研究はこれらの発電機について行った。調査研究は計画通り、昨年度はガスタービン発電機 のガバナモデルの調査研究に、本年度は蒸気タービン発電機のガバナモデルの調査研究に取り組ん だ。また、本年度励磁回路を含むAVRについても調査研究に取り組んだが、AVRはタービンの 種類に無関係にメーカ毎に同一型式のものが組み込まれていることから、メーカによる違いに着目 して調査研究を進めた。
蒸気タービン発電機は、昨年度実施したガスタービン発電機と異なり、事業用と産業用では使用 用途が大きく異なるため、最初に事業用蒸気タービン発電機と産業用蒸気タービン発電機の特徴に ついて紹介する。次に、AVRについてメーカによる違いを紹介する。
1.2 研究対象とした産業用蒸気タービン発電機の特徴
1.2.1 事業用・産業用蒸気タービン発電機および電力系統の特徴の違い
最初に、蒸気の使用方法から見た事業用蒸気タービン発電機と産業用蒸気タービン発電機の違い を述べる。
事業用では、蒸気タービン発電機は原子力発電所や火力発電所で適用されており、最大
120
万kW
程度の大容量発電機である。発電専用のため原子炉やボイラを通過して発生する蒸気の大半は 復水器で冷却されて凝縮水となり、給水ポンプで原子炉やボイラに送水されて再び蒸気となる。図 1.2.1-1に、事業用蒸気タービン発電機の構成例を示す。図 1.2.1-1 事業用蒸気タービン発電機の構成例
事業用火力発電所の蒸気タービン発電機はいわゆるランキンサイクルをベースに運転されている が、熱エネルギーの多くが復水器で海水などの多量の冷却水と熱交換されて海などに放出されるた め、再熱・再生サイクルによるエネルギー効率の改善が図られているものの効率は
45%
程度である。ボイラ
主蒸気 再熱蒸気
高圧
タービン 低圧
タービン 中圧
タービン
解列遮断器
発電機 電力会社 ネットワーク
復水器
:蒸気の流れ 冷却水
冷却水
図 1.2.1-1に示す事業用蒸気タービン発電機のガバナは、高圧タービンに設置されている主制御 弁と中圧タービンに設置されている中間弁を持つが、主制御弁と中間弁は一体として制御されてお り、実質的には主制御弁でのみ制御し、発電機出力や回転数を制御している。また、タービン発電 機は大容量で蒸気の飲み込み量も多大なため、原子炉、ボイラとは協調制御されている。
他方の産業用蒸気タービン発電機について、今回研究対象とした石油精製装置の蒸気タービン発 電機を例に述べる。図 1.2.1-2に対象とした産業用蒸気タービン発電機が設置された電力系統と蒸 気系統を示す。
図 1.2.1-2 研究対象とした産業用蒸気タービン発電機系統
石油精製装置では、原油などの加熱源や配管などの保温用熱源の他、ポンプや大型コンプレッサ ーの駆動源として様々なエンタルピーを有する蒸気が用いられているが、圧力クラスにより高圧蒸 気系、中圧蒸気系、低圧蒸気系に集約されて装置群に供給されている。高圧蒸気は中圧蒸気へ、中 圧蒸気は低圧蒸気へ降圧されるが、蒸気の降圧に変換弁を用いると蒸気の保有エネルギーを活用で きないため、タービン発電機を介して降圧させて、エネルギーを電力として回収している。
装置の蒸気消費量は、精製される原油の種類や処理量等により常に変化するため蒸気圧力も変動 している。このため、産業用蒸気タービン発電機は、装置へ送気している複数の蒸気系統の圧力を 制御する必要がある。一方で、電力的には受電並列運転時は受電電力をミニマムとするなどの電力 制御機能を、発電機単独運転時は回転数制御が必要であり、産業用蒸気タービン発電機は複数の制 御対象を複数の制御弁で制御している。
このように、事業用蒸気タービン発電機と産業用蒸気タービン発電機では蒸気の使用方法による
~
発電系 電力負荷 受電系
電力負荷 発電系
電力負荷
受電系 電力負荷
電力会社
解列遮断器 解列点
装置群 蒸気負荷
高々圧蒸気 高圧蒸気
中圧蒸気 低圧蒸気
蒸気系統
電力系統 電力の流れ 蒸気の流れ G
ガスタービン発電設備 昨年度対象
今年度対象
P
G52B
52G 52G
G G
蒸気タービン発電設備
違いから、ガバナ制御の制御対象は事業用と産業用では異なるが、電力系統との連系においても事 業用発電機と産業用発電機では違いがある。この点から、事業用電力系統と産業用電力系統の違い を2点述べる。
一つは、電気的なトラブル時に遮断する遮断器が異なることである。発電機が接続された電力系 統で事故があり解列させる場合、事業用電力系統での解列は、該当する発電機遮断器を開放する。
これにより電力系統から切離れるとともに発電を停止する。しかし、産業用電力系統では、プラン トの停止は許容されないことから、解列は発電機遮断器ではなく受電変圧器二次側遮断器や母線連 系遮断器を開放して、負荷に給電しながら発電機自立運転に移行することになる。図 1.2.1-1, 2 では、この観点から両系統の解列点の違いを合わせて示した。
もう一つの違いは、昨年度、報告書第2章
2.1
はじめにで述べたように、産業用電力系統の負荷 は大半が電動機であることである。電動機は、短絡事故中は電圧降下により電動機トルクは低下す るためストールしてしまう。事故遮断後は、元の回転数に戻ろうとして電動機群は一斉に再起動電 流を要求するため、電圧の回復は遅れることになる。特に、解列時は受電系統と切離れて発電機自 立運転となることから、発電機は単独で電圧を回復させる必要があり、短絡事故時の電圧安定度は 大きな問題となる。1.2.2 対象とした蒸気タービン発電機の詳細
今回研究の対象とした実際に石油精製装置に適用されている発電機を、図 1.2.2-1 産業用蒸気 タービン発電機の構成例に示す。対象蒸気タービン発電機は
2
段抽気復水タービンである。図 1.2.2-1の蒸気タービン発電機には、図 1.2.1-2に示すように、ガスタービン発電機の排熱ボ イラで発生した高圧蒸気が送気されてくるが、この排熱ボイラは蒸気圧力制御機能を有していない ため、蒸気タービン発電機の主制御弁で制御(前圧制御と言う)している。また、蒸気タービンか らは、第1段抽気からは中圧蒸気が、第2段抽気からは低圧蒸気が抽気されるが、受電並列運転時 は発電機出力を一定に制御することも機能として求められている。従って、主制御弁、第1抽気弁、
第2抽気弁の3弁により、高圧蒸気圧力、中圧蒸気圧力、低圧蒸気圧力、発電機出力の4対象を制 御することになるが、3弁では3対象しか制御できないため、第1抽気弁は、中圧蒸気圧力か低圧 蒸気圧力かどちらか一方を選択して制御している。
図 1.2.2-1 産業用蒸気タービン発電機の構成例
~ 電力会社系統
解列遮断器
装置群 電 力 負 荷 装 第1抽気弁
発電機
復水器 蒸気タービン
高圧蒸気
中圧蒸気 低圧蒸気
主蒸気弁
第2抽気弁
:蒸気の流れ 冷却水
排熱 ボイラ
52G 52B
受電系
また、実際のガバナから各弁駆動部までの制御回路を図 1.2.2-2に示す。
図 1.2.2-2 当該蒸気タービン発電機の各弁駆動部までの制御回路
蒸気タービン発電機のガバナは、図 1.2.2-2のように速度制御部の信号に出力制御部の信号を足 し合せた信号(図中、回転数設定信号、以降回転数設定信号)と高圧蒸気圧力制御信号の低値選択
(図中、低値選択2)後、各バルブに分岐され弁特性補正されて各バルブの制御信号となる。これ らの信号は、第1抽気弁では中圧蒸気制御信号と低圧蒸気制御信号のいずかが選択された中低圧蒸 気圧力制御信号と低値選択(図中、低値選択3)される。同様に第2抽気弁では、出力制御信号と 低値選択(図中、低値選択4)される。
その他、トラブル時などによる出力急減時には各弁は急速に絞られるが、蒸気のエネルギー密度 は低いことから、所定量を超えた出力を下げる時の各弁の作動量は大きく時間が掛かるため、先行 して絞る必要がある。このため、各弁制御部はロードシェディング機能により、発電量の変動に従 い、蒸気系統などの所量に変化が現われる前に先行して絞り制御を行っている。系統解析の精度評 価に負荷遮断時の実波形と解析波形の比較を行うことがあるが、ロードシェディング機能を考慮し ないと大きく乖離し、評価の判断を間違うことがあるため留意しなければならない。
また、解列により、受電並列運転から発電機自立運転に移行した場合、蒸気タービン発電機は同 一系統に設置されているガスタービン発電設備とともに速度調停率に従って、負荷を分担しつつ速
* 各制御弁制御部詳細(各弁回路を一般化し表記)
+
+
選択 52G
52G
低値選択 1 手動設定
低値選択 2
低値選択 4 高圧蒸気制御部
出力制御部 DROOP
速度制御部 PI
弁開度補正
弁開度補正
弁開度補正 中圧蒸気制御部
出力一定制御部 低圧蒸気制御部
主制御弁制御部
第1抽気弁制御部
第2抽気弁制御部 低値選択
3
*
*
*
ゲイン リニアライザ
流量補正
ゲイン
中立点
+
-
リミッタ 弁開度指令 A/D変換 電磁コイル
弁開度検出器 A/D変換
弁検出回路 ロード
シェディング
-
+ + 回転数設定信号
中低圧蒸気 制御信号
度制御を行うことになる。このように、産業用蒸気タービン発電機は、石油精製プラントへの蒸気 送気を優先しながら、受電並列運転時は出力を、発電機自立運転時は速度を制御しているのである。
1.2.3 蒸気タービン発電機の蒸気飲み込み量と発電出力
蒸気の飲み込み量と発電出力の関係を示しながら、実制御について具体的に述べる。蒸気タービ ン発電機の蒸気飲み込み量と出力の関係は、図 1.2.3-1に示す特性曲線によって示される。同図の 縦軸は蒸気の流量であり、横軸は出力である。
(a)蒸気消費量線図 (b)蒸気バランスと出力
図 1.2.3-1 当該蒸気タービン発電機の蒸気消費量線図(イメージ図)
図中に示された各蒸気量と発電出力の関係を説明する。
a
は、蒸気タービン主蒸気飲込量であり、b
は第1
抽気量(中圧蒸気量)、c
は第2
抽気量(低圧蒸気量)、d
は復水量、e
は発電出力である。図 1.2.3-1(a)の蒸気消費量線図には、第
2
抽気量c
が示されていないが、主蒸気流量a
から第1
抽 気量(中圧蒸気量)b
を引いたものが、低圧蒸気量c
と復水量d
の合計となることから、a − b = c + d
(1.2-1) より、c = a − b − d
(1.2-2) と求めることができる。出力は、図 1.2.3-1(a)の蒸気消費量線図で、主蒸気aにおける抽気量bとの交点を出力軸に投影 して出力e
’
と判る。この出力は復水タービン部以外の出力であることから、さらに復水分d相当を 加えて、e点が発電機出力となる。受電並列運転時、本蒸気タービン発電機では、図 1.2.2-2の低値選択2で回転数設定信号と高圧 蒸気圧力制御部からの信号のいずれかの低値が選択される。通常、出力制御部の信号は定格出力に 設定され高いため、回転数設定信号も高い。一方、高圧蒸気圧力制御部の信号は排熱ボイラから送 られてくる高圧蒸気量aに従って制御されるため回転数設定信号より低く、低値選択2では高圧蒸 気制御信号が選択されて出力され、高圧蒸気圧力を保つように主蒸気弁が制御する。
第1抽気弁の制御部には、低値選択2の出力信号と低圧蒸気制御部からの信号のうち、低値選択
3
で選択された信号が入力される。低値選択2
からの信号は流量補正されて高めの信号となること から、通常は低圧制御信号が選択されて低圧蒸気圧力を制御し結果として抽気量cが決まる。c
d 出力量
b
e a 高圧蒸気量
中圧蒸気量 低圧蒸気量
復水量
復水量
e’
出力 主蒸気飲込上限
定格出力(上限)
主蒸気飲込量
第1抽気量最低 第1抽気量最大
a b
0 e
d
第2抽気弁は、同様に低値選択2の出力信号と出力一定制御部からの信号のうち、低値選択4で 選択された信号が入力される。低値選択2からの信号は流量補正されて高めの信号となることから、
通常は出力一定制御信号が選択されて出力を制御し結果として復水量dが決まる。
中圧蒸気抽気量は制御されていないが、制御されている各蒸気量a,c,dのバランスにより、
式(1.2-2)を変形してb(=a
−
c−
d)ほど抽気することになる。なお、中圧蒸気圧力は、図 1.1.2-2 に示すように別に設置されている蒸気タービン発電機によって制御されている。解列時は、図 1.2.1-2に示すように遮断器 52Bで解列することから、当該蒸気タービン発電機と ガスタービン発電機は、両機で受電系への潮流
PG
分の出力を絞り、回転数は上昇する。このため、速度制御部の信号は絞られて回転数設定信号が低くなり、低値選択2では回転数設定信号が選択さ れるとともに、低値選択3でも、低値選択4でも、低値選択2の出力信号(=回転数設定信号)が 選択されて回転数制御が行われる。
このように、実際の回路では、解列時は回転数が上昇すれば、蒸気圧制御から回転数制御へ切り 替わることになる。しかし、回転数が上昇しなければ、蒸気圧力制御信号が選択されて、蒸気圧力 制御を継続する。
1.3 研究対象とした発電機の励磁系を含んだAVRについて 1.3.1 発電機励磁回路およびAVRの構成
発電機は、電圧を発生し電圧を制御するため、励磁回路及びAVRを有している。図 1.3.1-1に 励磁回路及びAVR回路を示す。
図 1.3.1-1 励磁回路および AVR 回路
当該発電機は他励磁交流励磁式であり、図1.3.1-1に示すように、永久磁石発電機により励磁用 元電源を発生し、この交流電源をサイリスタやダイオードで整流し、交流励磁機で交流電源を発生 させる。この交流電源は回転整流器で整流されロータ内に埋め込まれた界磁巻線に流れて、巻線上 に磁石を発生させて発電している。AVRはサイリスタの点孤角制御(サイリスタの通流時間を調
永久磁石発電機 交流励磁機
発電機
回転整流器
S
AVRN N
S
整)を行い、最終的にはロータ上の磁石の大きさを調整し電圧を調整する。AVR回路を図1.3.1-2 に示す。
図 1.3.1-2 AVR回路
メーカから提示されたガスタービン発電機と蒸気タービン発電機の励磁回路を含んだAVRモデ ルを図 1.3.1-3に示す。
(a) 蒸気タービン発電機AVRモデル
(b) ガスタービン発電機AVRモデル
図 1.3.1-3 励磁系及びAVRモデル 電圧
増幅 CC
サイリスタ
電圧 電圧
電圧
電圧設定 電圧検出 比較増幅
力率限定
リミッタ
サイリスタ 点孤角制御 界磁電流
検出回路 横流補償
永久磁石発電機 発電機
交流励磁機
AVR
+
1+TcS
1 KC
T1S
1
KP KC KG KT
1+TeS 1
1+TvS!
1
-
+ 無効電力
DROOP
+
+
+
-
GNC
ACR サイリスタ 交流励磁
界磁 電圧 AVR
+
1+T5S
KC
1+T1S
1 1+T4S
1+T3S
KP 1+T2S
1+T6S
1
KF 1
1+T7S
電圧検出
無効電力
DROOP
電圧検出
電圧設定 電圧
設定
比較増幅 ACR
サイリスタ 応答特性
ACR:界磁電流制御 GNC:点孤角制御
図 1.3.1-3のAVRモデルは(a),(b)とでは異なるが、この違いは蒸気タービン発電機とガスター ビン発電機による違いではなく、メーカによる違いである。このモデルを本研究では標準モデルと 称する。詳細モデルは、図 1.3.1-3の標準モデルでも他励交流式発電機方式の実回路を表現できて いることから、標準モデルで表現されていない過励磁制限などの付属回路を加えて詳細モデルとし た。
過励磁制限は、過励磁状態の以下の検出方法により(1)
①発電機界磁電流により検出
②発電機界磁電圧により検出
③励磁機界磁電流により検出
④発電機の負荷電流から、有効電力と無効電力を求めて発電機可能出力曲線を描き、可能出力曲 線の外側の程度により検出
に分類できる。本研究に用いた過励磁制限は④の方式であった。動作特性をメーカに確認したとこ ろ、ガスタービン発電機
AVR
過励磁制限の時定数は短く動作するため、過励磁制限を組み込んで 詳細モデルとした。なお、ガスタービン発電機の過励磁動作領域④の方式は、図 1.3.1-4より、可能出力曲線を元に 以下の式で求めることができる。
ⅠOEL= Ⅰ2
cos
2θ+(
Ⅰsin
θ+I
0)
2(1.3-1)
過励磁制限モデルは、式
(1.3-1)
をモデル化して表現し、標準モデルに組み込み、詳細モデルとした。図 1.3.1-4 可能出力曲線と過励磁制限動作領域
蒸気タービン発電機側のメーカの過励磁制限は動作開始時間が長いため、モデルには組み込まな かったが、可能出力曲線を過励磁の検出に用いる方式(④の方式)は、発電機や励磁機の界磁電流 を検出する他の方式に比較して、過励磁制限の機能や動作の評価が難しく、本研究での調査機関内 には明確にできなかった。
Ⅰ
OEL可能出力曲線 1.05倍 OEL動作域
端子電圧ベクトル
(適正電圧)
電流換算し Ⅰ0 負荷電流ベクトル Ⅰ
θ
産業用発電機は、事業用と異なり励磁系の裕度を見込んで設計されていないと考えられるため、
系統解析の際には、特に過励磁制限についてメーカに機能と特性についての確認が必要である。
1. 4 Matlab / Simulink を用いた蒸気タービン発電機ガバナモデルおよび ガスタービン発電機AVRモデルの構築
必要精度を見極めるため、ガバナについては今年度の対象である蒸気タービン発電機の簡易モデ ルと詳細モデルを、AVRについては標準モデルと詳細モデルとで明らかに動作が異なるガスター ビン発電機のAVRを対象にして標準モデルと詳細モデルを、
Matlab/Simulink
により構築し、両 者の差を比較することにより、必要精度について検証した。Matlab/Simulink: Matlab:数値計算やアルゴリズム開発などを行うソフトウエア Simulink:ブロック線図のシュミレータ
1.4.1 蒸気タービン発電機ガバナ簡易モデルと詳細モデル
通常、メーカから提示される蒸気タービン発電機ガバナモデルを図 1.4.1-1に示す。主制御弁だ けでなく、第一抽気弁、第二抽気弁についてもブロック図に表現されており、簡易モデルとして定 義できるかは意見の分かれるところであるが、今回メーカの協力を得て作成した詳細モデルと区別 するため、簡易モデルと称する。
図 1.4.1-1 蒸気タービン発電機ガバナ簡易モデル
簡易モデルでは、蒸気系の制御は表現されていないことやバルブの応答速度が一定であるなどの 実機と異なる部分もある。詳細モデルでは、これらを表現し、モデルの違いによる解析結果への影 響を評価した。
詳細モデルは、図 1.2.2-2をできるだけ忠実にモデル化したが、蒸気系統の影響を加味すると電 力系統の変動によるガバナの動作を適正に評価できなくなるため、本研究においては、蒸気の変動 は考えず蒸気制御部は解列前の状態に制御されているものとして固定値を用い、その固定した点か ら解列により、回転数制御に低値選択されるよう配慮した。実際の蒸気系統は時定数が長く、装置 側の蒸気変動があってもすぐには影響が現れず、仮に第一抽気量
b
が絞られたとしても、その制御 は電気的変動に比較して高速で動くことはないため、固定値でも問題ないものと判断した。なお、回転数が上昇すれば、回転数制御部からの信号が低値選択
2
で選択されて各バルブは全て 絞られることになり、解列によるガバナの制御結果蒸気系統も変化し、やがては、蒸気圧制御も作+
- KG
1+TGS 1+T1S
1
1+T2S
1+T3S 1
1 K1
K2
1+TC1S 1
1+TC2S 1
1+TC3S 1
KC1
KC2
KC3
+
+ +
+ -
- 損失
TRS 1
ロータ 慣性定数
ロードシェディング ロードシェディング
ロードシェディング 速度
設定
電気ガバナ 電気出力(トルク)
回転 速度
サーボモータ 蒸気系応答 負荷分担率
動することが考えられるが、解析対象の数秒間ではこれも無視できると判断した。
1.4.2 両モデルによる蒸気タービン発電機の負荷遮断時の応答比較
ここでは、蒸気タービン発電機ガバナの簡易モデルと詳細モデルを構築し、両モデルによる蒸気 タービン発電機の負荷遮断時の応答解析を行った結果を述べる。図 1.4.2-1、図 1.4.2-2 は
MATLAB/Simulink
を用いて構築した簡易モデルおよび詳細モデルである。本ガバナの制御ブロック図において、図 1.4.2-1の簡易モデルは回転数制御と簡略タービンモデ ルを組み合わせたモデルとなっている。回転数制御はドループゲインおよび一次遅れのみでガバナ 制御を行うモデルで表現し、タービン側も一次遅れで表現された簡略化モデルとなっている。また、
一般に事業用発電機ガバナでは固定出力モードで運用されることから、メーカからは事業用データ が提示され、産業用電力系統における解析においてもガバナの出力設定は固定として扱われてきた。
しかしながら、自家用発電機ガバナでは電力会社系統からの解列時に自立運転を行うため、構内負 荷に応じて発電機出力を調整する必要がある。ここでは、図 1.4.2-1に示すように固定出力モード
(
Droop mode
)、可変出力モード(Isochronous mode
)の切換を含むモデルとした。なお、メーカ から提示された簡易モデルにはこの点が配慮されておらず、負荷遮断時の波形は大きく乖離するこ とが判った。一方、実際の電気ガバナ部は図 1.4.2-2(a)に示すように、出力制御および回転数制御が組み合わ され、速度偏差あるいは電力偏差に基づくドループ(調定率)演算が行われ
PI
制御を行う構成と なっている。さらに、負荷遮断時にゲイン切換を行うなどより複雑な構成になっている。また、タ ービン側モデルについても図 1.4.2-2(b)に示すように詳細モデルで表現されている。図 1.4.2-1 Simulink 上で構築した自家用蒸気タービン発電機ガバナ簡易モデル 事業用:固定
産業用:可変
ドループゲイン + 一次遅れ
(a) ガバナシステムモデル
(b) アクチュエータおよびタービン側モデル
図 1.4.2-2 Simulink 上で構築した自家用蒸気タービン発電機ガバナ詳細モデル
表 1.4.2-1は、簡易モデル(出力設定が固定)と出力設定を可変にできる改善型簡易モデル及び 詳細モデルを用いて
100%
負荷遮断時の応答を比較した結果である。また、図 1.4.2-3 はそのとき の発電機ロータの回転数および高圧・中圧・低圧の各弁開度の応答である。発電機遮断器を解列す ることから、簡易モデルにおいては可変出力モードで動作させ、詳細モデルにおいてはドループ演 算がはたらかず速度制御のみとし、さらにP
制御のゲインおよびI
制御の積分時間を切り換えてい る。また、比較のため、従来の解析で利用されてきた固定出力モードでの応答もあわせて示してい る。これらの結果から、以下のことがわかる。・ 簡易モデル(固定出力)では回転数最大値が実測値を大幅に上回る
・ 改善型簡易モデル(可変出力)では回転数最大値が実測値をやや下回る
・ 詳細モデルでは回転数最大値がほぼ実測値どおり
・ 簡易モデル(固定出力)では定格回転数(
3,000 rpm
)に整定しない・ 改善型簡易モデル(可変出力)ではほぼ定格回転数に整定する
・ 詳細モデルでは定格回転数に整定する
従来の固定出力とした解析では解析精度面で大きく問題が生じることがわかる。一方、簡易モデル においても可変出力とすることで回転数最大値にやや差異が生じているが、大まかな特性について はほぼ合致していることが確認できる。実際の負荷遮断試験時の最大値は3,126rpmであり、より高 い解析精度が要求される場合においては詳細モデルを用いるほうが望ましいと考えられる。
表 1.4.2-1 100%負荷遮断時の回転数の比較
モデル 最大値 [rpm] 整定値 [rpm] 回転数上昇率 [%]
簡易モデ ル(固定)
3,210 3,142 7.00
簡易モデ ル(可変)
3,055 2,992 1.83
詳細モデ ル
3,094 3,000 3.13
実測値
3,126 3,000 4.20
3000 100
(rpm) 3000 )
(rpm − ×
回転数上昇率=最大値
(%)
0 5 10 15 20
2950 3000 3050 3100 3150 3200 3250
time [s]
Rotor Speed [rpm]
Simple (Fixed) Simple (Variable) Detailed
0 5 10 15 20
-0.2 0 0.2 0.4 0.6 0.8 1 1.2
time [s]
HPCV opening [p.u.]
Simple (Fixed) Simple (Variable) Detailed
(a) 発電機回転数 (b) 高圧蒸気弁開度
0 5 10 15 20 -0.2
0 0.2 0.4 0.6 0.8 1 1.2
time [s]
E1CV opening [p.u.]
Simple (Fixed) Simple (Variable) Detailed
0 5 10 15 20
-0.2 0 0.2 0.4 0.6 0.8 1 1.2
time [s]
E2CV opening [p.u.]
Simple (Fixed) Simple (Variable) Detailed
(c) 中圧蒸気弁開度 (d) 低圧蒸気弁開度 図 1.4.2-3 負荷遮断時の応答の比較
1.4.3 ガスタービン発電機の標準・詳細AVRモデルによる三相短絡時の応答比較
Simulink
上で構築した産業用ガスタービン発電機(GT)のAVRの標準モデルと詳細モデル を図 1.4.3-1および図 1.4.3-2に示す。前述のように、標準モデルに過励磁制限(OEL:Over Excitation Limit
)を組み込んだものを詳細モデルとした。図 1.4.3-1 Simulink 上で構築した自家用ガスタービン発電機AVR標準モデル
(a) AVR標準モデルとOELモデルの組み合わせ
(b) OELモデル
図 1.4.3-2 Simulink 上で構築した産業用ガスタービン発電機AVR詳細モデル
比較にあたっては、産業用電力系統は誘導電動機が負荷の大半を占めることから、短絡事故時の
電圧回復性の違いに着目して解析した。解析は第
3
章で述べるように、実電力系統を図 3.2.1-1の モデルに置き換え、表 3.2.2-1に示すケース1-2
電力管内の事故を想定して比較した。ガスタービ ン(GT)発電機のAVRモデルとして過励磁制限無し(図 1.4.3-1に示す標準AVRモデル)、過励 磁制限有り(図 1.4.3-2に示す詳細AVRモデル)の場合における過渡応答の比較を図 1.4.3-3に 示す。ただし、蒸気タービン発電機メーカのAVRは過励磁制限に余裕があり過励磁制限が動作し ないことから標準AVRモデルとし、ガバナについては蒸気タービン発電機、ガスタービン発電機 ともに詳細モデルを用いている。これらのモデルは第3
章で後述する。解析結果、過励磁制限有り の場合においては界磁過電流を抑制するように作用し、発電機界磁電圧と電流が抑制されているが、これに伴い発電機端子電圧の回復が遅れていることが確認できる。
0 5 10 15 20
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
time [s]
Active Power [p.u.]
GT(without OEL) GT(with OEL)
0 5 10 15 20
0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
time [s]
Reactive Power [p.u.]
GT(without OEL) GT(with OEL)
(a) GT 発電機有効電力 (b) GT 発電機無効電力
0 5 10 15 20
50 50.5 51 51.5 52 52.5
time [s]
Frequency [Hz]
GT(without OEL) GT(with OEL)
0 5 10 15 20
0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
time [s]
Terminal Voltage [p.u.]
GT(without OEL) GT(with OEL)
(c) GT 発電機周波数 (d) GT 発電機端子電圧
0 5 10 15 20 -0.1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
time [s]
Turbine Output [p.u.]
GT(without OEL) GT(with OEL)
0 5 10 15 20
1 1.5 2 2.5 3 3.5 4
time [s]
Field Voltage [p.u.]
GT(without OEL) GT(with OEL)
(e) GT 発電機タービン出力 (f) GT 発電機界磁電圧
0 5 10 15 20
1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
time [s]
Current for OEL operation [p.u.]
0 5 10 15 20
-0.4 -0.35 -0.3 -0.25 -0.2 -0.15 -0.1 -0.05 0 0.05
time [s]
OEL Output [p.u.]
(g) OEL 動作条件電流 (h) OEL 出力
0 5 10 15 20
0.8 1 1.2 1.4 1.6 1.8 2 2.2
time [s]
Current [p.u.]
GT(without OEL) GT(with OEL)
(i) GT 発電機電流
図 1.4.3-3 三相短絡事故時の応答(Case1-2:過励磁制限有無の比較)
参考文献
(1)
電気学会同期機励磁系の仕様と特性調査専門委員会:電気学会技術報告 第 536 号 「同期 機励磁系の仕様と特性」,電気学会(1995)
第 2 章 誘導電動機群の縮約方法の検討
2.1 はじめに
産業用電力系統の負荷設備には、ポンプやコンプレッサ、ファン等の駆動源として多くの誘導電 動機が用いられており、製油所においては数千台にもなる。系統解析を実施する際、それらすべて の誘導電動機のデータを調査し入力することは、膨大な労力を要しコンピュータの能力に制限もあ ることから、一般的には例えば
1,000kW
以上の大容量機のみ個別にデータを入力し、他の小中容 量機は需要設備毎に低圧と高圧で1台に縮約してデータ入力を行う等の方法で解析を実施している。この際、縮約する電動機の誤差を少なくすることが解析精度向上のために重要となる。
短絡事故が発生すると、電動機からみた電源側の電圧は事故の大きさ、事故の発生場所に応じて 低下することとなるが、電圧低下に伴い誘導電動機の発生トルクも低下するため、回転数が低下し ていく。短絡事故の遮断により電圧は一時的に上昇するが、その際誘導電動機へは定格電流の数倍 の電流が流れることとなり、無効電力が多いことから電圧回復に悪影響を及ぼすこととなる。以上 より特に事故時における電圧回復特性の解析精度を向上させるためには、誘導電動機の要求する無 効電力の挙動を少ない誤差にて解析することが精度向上に向けて重要となる。縮約のイメージを図 2.1-1に示す。
図 2.1-1 誘導電動機縮約のイメージ
2.2 誘導電動機の縮約方法
2.2.1 解析に必要となる誘導電動機のデータ
縮約方法の検討は、汎用系統解析ツール(
ETAP: Electrical Transient Analyzer Program,
米国OTI
社)で行った。ETAP
で解析を実施するのに必要となる入力データを表 2.2.1-1に示す。誘導 電動機の検査成績書を見れば、入力データの大半は判明するが、誘導電動機のGD
2と負荷のGD
2、 トルク特性は個別に製作者に確認する必要がある。誘導電動機の試験成績書と入力データとの関係 を図 2.2.1-1に、負荷のトルク特性の例を図 2.2.1-2に示す。なお、
ETAP
では、誘導電動機等価回路の定数について推定機能があり、図 2.2.1-3に示す値か らT
型等価回路の各定数を推定出来るため、今回はこの機能を活用することとし、通常誘導電動機 の入力データである等価回路定数は入力データとして扱わなかった。GD
2:[kgf
・m
2]
重力単位系における慣性モーメントで、はずみ車効果ともいう T 型等価回路:図 2.2.1-3 に示すようなコイルの形M M M M
・・・・・・・
M
電動機郡 縮約機
表 2.2.1-1 ETAP における誘導電動機(含む負荷)入力データ
①
②
③
④
⑤
⑥
⑦
⑧
⑨
⑩
⑪
⑫
⑬
定格出力[kW]
定格電圧[kV]
力 率
100% 運転時 75% 運転時 50% 運転時
GD
2[kgf・m
2] すべり(100%運転時)
効 率
100% 運転時 75% 運転時 50% 運転時
最大トルク(%)
GD
2[kgf・m
2] トルク・速度特性 誘
導 電 動 機
負荷
拘束
電流[A]
力率 トルク[%]
極数
図 2.2.1-1 誘導電動機の試験成績書抜粋(サンプル)と入力データとの関係
①
②
③
④
⑤
⑦
⑧
⑩
⑪
⑨
※計算で算出図 2.2.1-2 ポンプのトルク特性(サンプル)
図 2.2.1-3 ETAP における T 型等価回路推定機能
2.2.2 「定格出力」の縮約方法
誘導電動機個々の定格出力を総計し、縮約機の定格出力とする。
図 2.2.2-1 縮約機の「定格出力」
2.2.3 「力率」の縮約方法
誘導電動機個々へ入力される有効電力、無効電力をそれぞれの成分毎に総計し、総計した有効電
M M
・・・・・・・
M
A [kW] B [kW] Σ(A+B+…)[kW]
左記データから、
等価回路定数を推定
力、無効電力の割合から縮約機の力率を算出する。拘束時における縮約機の力率も同じ方法にて算 出する。
図 2.2.3-1 縮約機の「力率」
2.2.4 「効率」の縮約方法
誘導電動機個々の効率から有効電力の入力値を算出し、有効電力の入力値と出力値をそれぞれ総 計し、その割合から縮約機の効率を算出する。
図 2.2.4-1 縮約機の「効率」
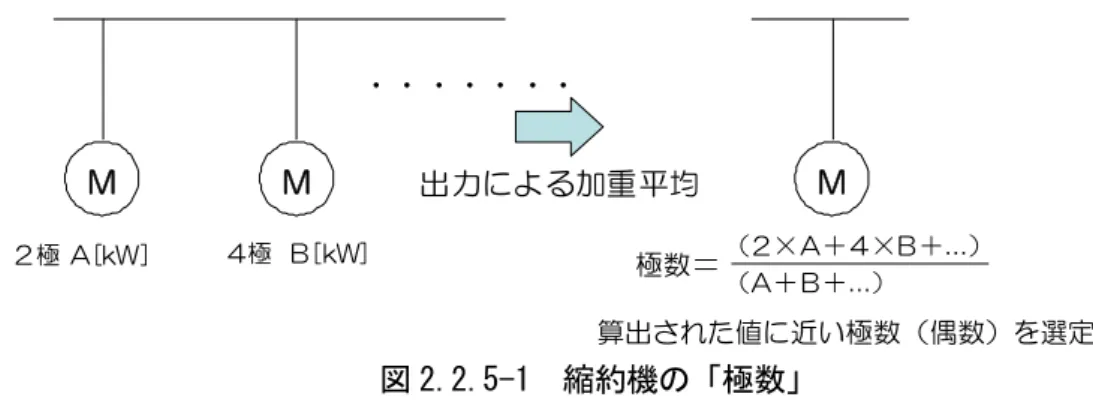
2.2.5 「極数」の縮約方法
個々の誘導電動機が負荷設備として解析全体に与える影響度は、出力の大きさによるものと考え られる(出力の大きな誘導電動機が支配的となる)ことから、出力による加重平均にて算出された 値に近い偶数値を縮約機の極数とする。なお、極数は回転体の回転数に直結する値であり、回転体 の運動エネルギー(
= Jω
2/2
、J
:慣性モーメント、ω:角周波数)を決定する重要なファクターと なる。短絡事故時、電圧が低下し、誘導電動機の発生トルクが低下すると、回転体は惰性で回転を 継続しながら、回転数が低下(すべりが大きくなる)していくため、すべりの低下状況は事故前の 運動エネルギーに関係してくる。よって、縮約機と個々の電動機とで運動エネルギーが等しくなる ように縮約する。縮約機の極数は本方式にて計算し、運動エネルギーが等しくなるよう慣性モーメ ント(J
)を次項で述べる方法にて算出する。M M
・・・・・・・
M
P
AkW Q
AkVAR
P
BkW Q
BkVAR
√(P
A2+Q
A2) COSθ
A= P
AP
A+P
B+…
Q
A+Q
B+…
√(P
A+P
B+・・)
2+ (Q
A+Q
B+・・)
2COSθ=
P
A+P
B+…
M M
・・・・・・・
M
P
A(IN)kW
P
A(OUT)kW
P
B(IN)kW
P
B(OUT)kW
η
A= P
A(IN)P
A(out)η=
P
A(IN)+P
B(IN)+…
P
A(OUT)+P
B(OUT)+…
P
A(IN)+P
B(IN)+ …
P
A(out)+P
B(out)+…
図 2.2.5-1 縮約機の「極数」
2.2.6 「GD2(電動機+負荷)」の縮約方法
「
GD
2」は、慣性モーメントと同じく、物体の回しにくさ、あるいは回転している物体のとめに くさを表すもので、慣性モーメント(J
)とはJ = GD
2/4
の関係がある。昨年度の調査研究報告書 でも述べているように、短絡事故後の電圧回復特性に大きな影響を与える定数である。縮約機と個々 の電動機との運動エネルギーを等しくするために、回転数(極数)とGD
2から、個々の誘導電動機 の回転体の運動エネルギーを算出し、総計したものを縮約機の運動エネルギーとして、2.2.5
項で算 出した極数から、縮約機のGD
2を算出する。回転体の運動エネルギー=J×ω2/2
=(GD2/4)×〔2×π×(120×f/p)/60)〕2/2 = 2π2×GD2×f/p2 [J]
GD2:慣性定数[kgf・m2] ω:角速度[rad]
f:電源周波数[Hz]
p:誘導電動機の極数
なお、別な方法として回転体の運動エネルギーを
kVA
で割り、1kVA
あたりの運動エネルギーであ る個々の単位慣性定数[s]
を出力の加重平均にて、縮約機の単位慣性定数を求め、GD
2を算出する方 法も考えたが、運動エネルギーをkVA
で割り単位慣性定数を求め、加重平均のため端子慣性定数に またkVA
をかけることとなり、結局は個々の運動エネルギーを総計して縮約機の運動エネルギーと する方法と同一の結果となる。図 2.2.6-1 縮約機の「GD2」
2.2.7 「すべり」,「始動トルク」,「最大トルク」の縮約方法
M M
・・・・・・・
M
2極 A[kW] 4極 B[kW] (2×A+4×B+…)
極数= (A+B+…)
算出された値に近い極数(偶数)を選定 出力による加重平均
M M
・・・・・・・
M
A [kgf・m
2] B [kgf・m
2] GD
2:
A´[J] B´ [J]
回転体エネルギー:
(GD
2/8)×ω
2P
AkW
Q
AkVAR
P
BkW Q
BkVAR
(A´+B´+・・)[J]
縮約機のGD
2誘導電動機個々の値から出力による加重平均により縮約機の「すべり」、「始動トルク」、「最大ト ルク」を算出する。
図 2.2.7-1 縮約機の「すべり」、「始動トルク」、「最大トルク」
2.2.8 「始動電流」の縮約方法
個々の誘導電動機において、始動時(拘束時)の有効電力、無効電力を算出し、それぞれの成分 毎に総計したうえで、縮約機の起動時皮相電力を算出する。縮約機の起動時皮相電力から起動電流 を算出する。
図 2.2.8-1 縮約機の「始動電流」
2.2.9 「負荷トルク特性」の縮約方法
各負荷トルクを回転数毎に数値化(誘導電動機の定格トルクに対する割合)し、回転数毎に個々 の誘導電動機の出力による加重平均により縮約機の負荷トルクを算出する。なお、負荷のトルク特 性は、ほとんどが始動時の検討に使用するため、製作者に要求しても、無負荷(ポンプの場合吐出 バルブ閉)での特性が提出される場合が多いが、定格運転点におけるトルク特性を要求する必要が ある。
M M
・・・・・・・
M
A[%] B[%]
(A×P
A(OUT)+B×P
B(OUT)…)
出力による加重平均
P
A(OUT)kW P
B(OUT)kW
P
A(OUT)+P
B(OUT)…)
M M
・・・・・・・
M
P
ASkW Q
ASkVAR
P
BSkW Q
BSkVAR
√(PAS+PBS+・・)2+ (QAS+QBS+・・)2
√3・V
図 2.2.9-1 縮約機の「負荷トルク」
M M
・・・・・・・
M
(18×PA(OUT)+13×PB(OUT)
…
)各回転数毎にトルク
を出力で加重平均
PA(OUT)+PB(OUT)
) …
)電動機の定格トルク を100とした%表示
A B
0% 18% 13%
10% 5% 5%
20% 5% 3%
30% 8% 8%
50% 22% 24%
75% 47% 54%
100% 88% 94%
負荷トルク 回転数
PA(OUT)kW PB(OUT)kW
回転数0%での縮約機負荷トルク
回転数毎に算出
縮約機



![表 2.2.1-1 ETAP における誘導電動機(含む負荷)入力データ ① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩ ⑪ ⑫ ⑬ 定格出力[kW]定格電圧[kV]力率 100% 運転時75% 運転時50% 運転時GD2[kgf・m2] すべり(100%運転時)効率100% 運転時75% 運転時50% 運転時最大トルク(%)GD2[kgf・m2]トルク・速度特性誘導電動機負荷拘束電流[A]力率トルク[%]極数 図 2.2.1-1 誘導電動機の試験成績書抜粋(サンプル)と入力データとの関係 ①②③④⑤⑦⑧⑩⑪⑨](https://thumb-ap.123doks.com/thumbv2/123deta/7346850.2435488/29.892.272.516.172.482/におけるデータすべりトルクGDトルクトルク誘導電動機サンプル.webp)
![図 2.2.1-2 ポンプのトルク特性(サンプル) 図 2.2.1-3 ETAP における T 型等価回路推定機能 2.2.2 「定格出力」の縮約方法 誘導電動機個々の定格出力を総計し、縮約機の定格出力とする。 図 2.2.2-1 縮約機の「定格出力」 2.2.3 「力率」の縮約方法 誘導電動機個々へ入力される有効電力、無効電力をそれぞれの成分毎に総計し、総計した有効電MM・・・・・・・MA [kW]B [kW]Σ(A+B+…)[kW]左記データから、等価回路定数を推定](https://thumb-ap.123doks.com/thumbv2/123deta/7346850.2435488/30.892.163.701.118.827/ポンプサンプルにおける誘導電動機誘導電動機それぞれkWB.webp)

![表 2.3.3-3 解析した誘導電動機のトルク特性 排水ポンプ 換気送風機 ボイラFDF 縮約機 168.7 114 103.9 118.2 230.3 343 198.5 242.2誘導電動機のトルク特性始動(拘束)トルク[%]最大トルク(%) [ 負荷のトルク特性 ] 各誘導電動機の負荷のトルク特性を表 2.3.3-4 に示す。今回対象とした誘導電動機の負荷トルク は、何れも2乗低減トルク特性であり、各負荷トルクと縮約機とで、大きな差異はないことから、 短絡事故条件 [ 残電圧 10 %、事故遮断](https://thumb-ap.123doks.com/thumbv2/123deta/7346850.2435488/42.892.186.719.148.228/トルクポンプボイラFDFトルクトルクトルクトルクトルクトルク.webp)
![表 3.2.1-1 発電機定数 ST GT [MW] 定格出力 19.7 40 Xd [%] 直軸リアクタンス 198 210 Xq [%] 横軸リアクタンス 188 200 Xd' [%] 直軸過渡リアクタンス 31 34 Xq' [%] 横軸過渡リアクタンス 48 51 Xd'' [%] 直軸次過渡リアクタンス 20 18 Xl [%] 電機子漏れリアクタンス 17 15 H [s] 単位慣性定数 1.2095 8.3 Tdo' [s] 直](https://thumb-ap.123doks.com/thumbv2/123deta/7346850.2435488/51.892.151.722.98.1124/リアクタンスリアクタンスリアクタンスリアクタンスリアクタンス.webp)