心理学における3次元視研究の動向
‑2001‑
The Trends in the Research of 3-Dimensional Perception in 200L
林 部 敬 吉
Keikichi HAYASHIBE
抄録:視覚心理学 にお ける3次元視研 究 の動 向 を運動要因に よる3次元視,両眼立体視,絵画的要
因 に よる3次元視,視空 間構造,その他 の3次元視 に分類 して報告 した。 と くに,両眼立体視 の研 究領域 での対応問題,立体視処理 にお ける持続系 と過渡系 の役割,背反す る輝度対応 での立体視 問題 な どの研究で着実 な進展がみ られている。
Abstract: The papers of 3‑dilnensional visual perception in 2001 were reviewed in the flelds of depth from
modon cue,stereoscopic宙sion,picto五 al cues and vimal reality.There was the steady progress ofthe research in the regions of the correspondense problenl,the physiological role of sustained and transient pathway,and
anti― correlated stcreograΠ l problem in stereoscopic vision.
序 口はじめに
本報告 には
,3次
元知覚 に関連 した論文 を,Psychological Abstract誌 の2000年 版 と2001年 版 か ら抽出 し
,3次
元視研究の各領域 に分類 して 紹介する。1口
運 動 要 因 に よ る3次元 視1.1.運動視差のための空間周波数チャ ンネル
運動視差 のための空 間周波数チ ャンネルの選 択特性 が どの ような ものかが,マス ク刺激法 を 用 いて,HogeⅣ
orst et al 181に
よって しらべ られ た。方法 は,図 1に示 された ように,観察者 の頭部運動 と連動 させ て提示す る と,サイ ン波状 の凹凸が出現す るシグナル刺激条件,および こ
れ にノイズ刺激 を加算 した ノイズ 。シグナルカ日 算条件 とを設定 し,ノイズ とノイズ間の距離
(ノ
イズギ ャ ップ)を変化 させ た時,どこでサ イ ン
波状 の凹凸知覚が崩れるか,その閾値 を測定 し た。空 間周波数 は,0。33,0。87c/dの2条件 であ
る。実験の結果,闘値はノイズギャップが小 さ くなるに伴い直線的に増大す ることが示 され,
また0.33,0.87c/dの 2種類の空間周波数のそれ ぞれで,ノ イズ効果が消失する帯域幅は1.4オ ク ターブであることが示 された。運動視差は狭い
う
Frequency(crdeD り
…
虔ョ
E︒ く
▲TII
一 a∩O
Si30al
Vertical position̲
図
1
観察者の頭部運動 と連動 させて提示すると,サイン波 状の凹凸が出現するシグナル刺激条件,およびこれに ノイズ刺激 を加算 したノイズ 。シグナル加算条件.ノ イズ量はノイズ とノイズ間の距離 (ノ イズギャップ
)
で操作する (HOgeⅣ
orst,Mo A,ct a1 2000)。
帯域幅 を持つ複数のチャンネルで伝達 されてい て,これは両眼視差のそれ と一致 している。
1.2.運動 視差 と両 眼視 差 の課 題 依存 型 ス トラ トジー
従来,運動視差,両眼視差,パースペ クティ
ブ要因など奥行手がか りが豊富 になるほど,絶
対的あるいは相対的奥行距離知覚は正確 になさ れると考えられている。Bradshaw et a1 0は,知 覚 される奥行距離の正確 さは,奥行手がか りの 種類 に依存するのではな く,相対的奥行距離に 関わる課題 に依存するのではないか と考 えた。
そこで,相対的奥行距離課題 として,(1)あ る等 しい奥行距離 に設定 された2つの ターゲ ッ トの 中央 にテス トターゲ ットを配置 し,テス トター ゲ ットを奥行方向に移動 させ,3つ のターゲ ット が前額に平行 になる位置 を求める課題,(2)3つ のターゲ ッ トが観察者か ら見て三角形 を形成す るように配置 し,別に同様 な3つの ターゲ ッ ト を用意 し,頂点の一つを移動 させてに同一の三 角形 になるように調整 させ る課題,(3)3つの
ターゲ ッ トが観察者か ら見て三角形 を形成する ように配置 し,前額 に平行 に配置 した底辺の距 離 と三角形の高 さとが等 しくなるように,頂点 に当たるひとつのターゲ ットを移動 させる課題 がそれぞれ設定 された。奥行手がか り条件 は,頭 部運動 を伴 う単眼視条件,頭部運動 を伴わない 両眼視条件,頭部運動 を伴 う両眼視条件である。
実験の結果,奥行手がか り条件 による差は出現 せず
,課
題の種類 による差が生 じた。このこと か ら,視覚 システムは課題 ごとにそのス トラテ ジーを変えていると考えられる。1.3.テクスチ ャ要 因 と運動視 差 要 因間 の手 がか り優 位性
テクスチヤ要因と運動視差要因間の手がか り 優位性 については,これまで,運動視差要因が優 位であるとされて きた(Braunstein 1968,Young et 江1993).0'B五en&Johnston(り は,図2に示 さ れたような水平,垂直,格子状の3種類のサイ
図
2
テクスチャ要因と運動視差要因の奥行手 がかり優位性.水平,垂直,格子状の3種類のサイン波形の空間周波数 パターンで奥行傾斜面が作成された。ただし,球は実験 場面では提示されない
(olB五
en,J.&Johnston,A.2000)。ン波形の空間周波数パ ターンを使用 して,テク スチヤによる奥行 と運動視差 による奥行 を作成 し,どちらの要因が奥行傾斜面の知覚 に対 して 手がか り優位性があるかをしらべた。実験は,基 準 となる奥行傾斜面 (45°)を提示 し,次にテス
ト傾斜面 を提示 し,どちらが傾斜 して知覚 され るかを求める「継時的恒常法」で行われた。そ の結果,視えの奥行傾斜面は,テクスチャ要因 によって優位 に規定 されていることが示 された。
Braunsteinらの結果 とこの結果 との不一致は,テ クスチ ャパ ター ンの相違 に求 め られてい る。
0'BHenら の実験では,テクスチ ャとしてレイ ト レース されたパ ターンが使用 されているので,
大 きさや密度勾配が奥行傾斜 について一定であ るため,奥行効果が大 きいためと考えられる。
1.4.運動立体視(kinetic depth)による 奥行 キ ャプチ ャ(depth capture) 運動立体視 と両眼立体視 (steropSiS)は,共通 の現象や特性 をもつ。たとえば,神経生理学的 領域では,霊長類の視覚領は,両眼視差 と運動 方向に特異的に反応するニューロンが存在する ことが報告 されている (Mauunsell&Van Essen
1983,Bradley et a1 1995,DeAngelis et a1 1998)。 視 覚心理学的領域では,運動立体視,両眼立体視 ともに,明瞭な運動立体要因や両眼視差要因が 存在 しないのに,内挿によって立体や奥行が知 覚 される(Sddpour et d 1992)。 Khaln&Blake(ゆ は,ステレオキャプチャ (両眼視差が存在 しな い領域が両眼視差のある領域 に囲まれると,そ
0
の部分が視差領域 に捉えられて立体的に知覚 さ れる現象)と同様 な現象が運動立体視で も生 じ ることを図の ような刺激条件で明 らかに した。
図3(a)と (b)の 左図では,中央の円筒形が運 動立体視 によって3次元的に知覚 され,中央の 水平の帯 も円筒の湾 曲面 にまきついて湾曲 して 見える。図(a)と (b)の 右図では,帯が垂直に 配置 されているためにキヤプチ ヤは生 じない。
これ らの観察結果か ら,運動立体視 と両眼立体 視は,と もに共通のメカニズムを持つことが確 認 される。
… …
… …
′
7987999
′ tこ
tウ
tよt?trIt?tt?
0
図3
図 (a)と (b)の 左図では,中央の円筒形が運動立体 視 によつて3次元的に知覚 されるため中央の水平の帯 も円筒の湾曲面にまきついて湾曲 して見える。図 (a) と(b)の右図では,帯 が垂直に配置 されているために 立体キヤプチヤは生 じない(Khaln,K.&Blake R.2000)
V。
・M oV2'V.●
V」4 V3‐●・・V8・ V3‐
VユD Vv‐
Ⅳ,● V.‐ V3・ VJD▼
図
4
運動か らの立体視を可能 にする3種
類 の運動図式.VlからV4までの局所的な個々の速度からVo(ト ランス レーシヨンの平均),Vx(水平方向の速度勾配),Vy(垂 直方向の速度勾配
)を
算出(Todd,J.T.&Perotti,V。 1999)。
1.5.オブテ ィカル・ モー シ ョンによる 対象の面の奥行 についての知覚 3次元空間における前額に平行な表面は,次 の式で表すことができる。
Z(x,y)=ZO+χ
sin
τtan
σ+ycos τtan
σ(こ
こで,σ (slant)は視線 と前額平行面 との 間の角度,τ (dlt)は前額平行面の垂直軸か らの 逸脱角度,ZOは対象表面か らイメージ化 された 面 までの視線上の奥行距離 をそれぞれ示す)
上式は,対象の表面上のすべての点のイメー ジ化 された面についての奥行 (Z)が,水平方向 の位置 と垂直方向の位置の簡単な関数式で表す ことがで きることを示 している。Ullman(1977) は, もし,正射影条件下で前額 に平行な面が垂 直軸 を中心 として回転するとき,対象のイメー ジ面上のすべての点の速度(V)は,次の式で与 えられることを示 した。
V(x,y)=ω(Zo+χ
sin
τtan
σ十ッCOS τtan
σ)
(こ
こで,ω
は3次元空間内の角速度 を示す)
上式か らX軸方向,あるいはY軸方向のイメー ジ上の各点の速度は,Vx=ω
sin
τtan
σ,Vy=ω sin τtan
σで表 される。これを変形すると,
tan
τ=Vx/Vy,tan σギ(Vx2+vyうノω が得 られる。この式 によれば,dlt(τ)は 2種 類の速度勾配か ら確定で きるが,slant(σ )は,角速度勾配(ω)が不明なので確定で きない。こ れを確定する一つの方法は,図4に示 されたよ
うに,VlからV4までの局所的な個々の速度か ら
Vo(運動速度の平均
),Vx(水
平方向の速度勾 酉己),Vy(垂
直方向の速度勾配)を算出すれば,
饉lt(τ)は一義的に決 まり,またslant(ω)が
ある既定値 をとると仮定すれば,7(Vx2+vy2) に比例 して増大すると予測 される。
Todd&PeЮ
tti。
3)は , 図5のようなパ ターン でvlからV4の部分の速度 を変化 して楔形状 を 提示 し,そのdltと slantの角度 を測定 した。そ の結果,tiltは正確 に知覚判断されたが,slantの 知覚判断には大 きな誤差が生 じることが示 され ている。Ⅷ 鮮 ′
?77
799
訓
質
7 R
了
77V99
い ぃ い い
︐ α ︼ い ぃ い ぃ い
融
い い い
覆 一
>いい"
"
い
嚢
い
0‐
い
2.両眼立 体 視
2.1.対
応する要素が存在しない領域の 両眼対応問題と立体出現ステ レオグラムの左右の対応す る領域 を構成 す る刺激要素の輝度が反対 である場合 には,両
眼立体視 にお ける対応 が原理 的 には存在 しない の に,立体 印象が生 じるこ とが報告 されてい る (Nakayalna&Shim可o1990,Anderson 1994,Liu,ct d1994)。 この問題 は,実際 の世界 では,対象 は 遮蔽 されて隠 されることが多いので,この部分 が両眼間で対応 しない領域 とな り, しか もこの 部分 は対象 間の奥行 関係 を規定す る手がか りな る と考 え られてい る。これに対 して,Tsai&Vic¨
tor。
の は,図6に示 された ように,観察者 と対 象 との間 に遮 蔽物が あ り,その遮蔽物 を通 して対象 を観察す る場合,遮蔽物 が両眼 の こめかみ 側 の視野 を隠すので,左右眼 には全 く異 なった 網膜像が投 影 され る こ とが幾何 光学 的 には生起 す る.この場合,遮蔽物 に注視点が あれ ば,遠
くの対 象の左右の網膜へ の投影点 は左右で対応 す る (aとが,bと げ).a,b(が,ピ)のなす角度 は遮蔽物 の水平方向の間隔距離 に等 しくなるの で,この全 く対応 を持 たない領域 と遮蔽物 との 間の相対 的奥行距離 は遮蔽物 の水平方向の間隔 距離 に拘束 されることになる。 この仮説 を検証 す るため に,図7に示 され たステ レオグラムが 考案 された。 このステ レオグラムの周辺領域 は 額縁 の ような遮蔽物 を構成 し,それ を通 して小
さなタイル を張 り付 けた面が設定 されているが,
この個 々の タイルの輝度 は左右 のステ レオグラ ムで背反 (and̲correlated)し てい る。これ を両眼 立体視す る と,対応 を持 たない領域が遮蔽物 よ
り手前 に浮 き出て視 える。この種 の立体視 は,水 平両眼視差 で も,また生態光学的な遮蔽効果で も説明がで きない新 しい現象の発見 と考 え られ る。
図
6
左右のステ レオグラムで対応が存在 しな い事態が生 じる幾何光学的条件. 観察者 と対象との間に遮蔽物があり,その遮蔽物を通して対象を観察する場合,遮 蔽物が両眼のこめかみ側 の視野をを隠すので,左右眼には全 く異なった網膜像 が投影されることが幾何光学的には生起する
(Ts五 ,J.J.
&Victor,J.D.2000).
図
7
左右領域で対応をもたないステレオグラム. このステ レオグラムの周辺領域 は額縁 の ような遮蔽物 を構成 し,そ れ を通 して小 さな タイルを張 り付 けた面 が設定 されているが,この個 々の タイルの輝度 は左右 のス テ レオグラムで反対(anti―
correlated)となってい る(Tsai,J.J.&Victor,J.D.2000)。
電̀
right eye
国
図
5
運動からの立体復元に使用された運動パ ターン.(TOdd,J.T.&Pero■i,V。 1999)。
い国
2.2.ガ
ボールバターンステレオグラム の対応問題1次元のガボールパ ターンか ら構成 されたス テ レオグラムの対応問題が,Prince&Eagle(10に よって詳 しくしらべ られた。使用 されたステレ オグラムは,図8にあるような1次元のガボー ルプロフィールか ら構成 され,そのコン トラス ト・エ ンベロープの大 きさ(σ)が変えられた。
実験では,同量の両眼視差 をもつが,その奥行
出現方向はそれぞれ反対 を示す (交差視差 また は非交差視差
)2種
類のステ レオグラムを提示 し,その正答率 を求めた。実験の結果,(1)コ ン トラス ト・エ ンベロープの大 きさが大 きいとき には(σ
=2.Odeg),奥行方向の正答率は両眼視差 量 (phase disparity)が 45°,90° ,135° と405°
,450°
,495° で高 く,225° ,270° ,315° と585°
,630°
,675° で低 く,こ のように正答率 と両眼視 差量 とは循環的に変化すること,(2)コ ン トラス ト・エ ンベ ロープの大 きさが小 さい ときには(σ=0.49deg),奥 行方向の正答率は両眼視差量に 関係なく高いこと,(3)コントラス ト・エ ンベロー プの大 きさが中程度のときには(←0.98deg),奥 行方向の正答率は両眼視差量
(315°
以下)が小さい ときには循環的に変化 し,これ より視差量 が大 きい ときには正答率は常 に高いこと,(4)奥 行方向の正答率は,両眼視差量が
0‑180°
,360‑540°
,720‑900° の範囲では常に正 しく,これ以 外の視差範囲で,しか もコン トラス ト・エ ンベ ロープが大 きいときには,悪くなること,など が示 された。奥行方向の正答率が高い と言 うこ とは,左右ステレオグラムの対応が正 しく行わ れることを意味するので,対応問題 には両眼視差量 とコン トラス ト・エ ンベロープの大 きさと が相互に影響 していることを示す。
2.3.パ
ー ヌムの半端 な ス テ レオ グ ラム 問題 (:imtting case)パーヌムの半端なステレオグラム問題(■miting case)とは,図9のように片眼のステレオグラム には2本の線分,他眼のそれには1本の線分か
ら構成 された もので,両眼立体視す る と2本の
線分が奥行位置 を異 に して視 える。 この現象 を 説 明す る仮 説 と して,二重 融合仮 説 とカモ フ ラージュ仮説(Howard&Ohni 1992)が あ る。二 重融合仮説 (図 a)とカモ フラージュ仮説 (図
b)と
は,片眼 の1本の線分が他眼の2本の線 分 の両方 と融合す る点で は一致 してい るが,二重融合仮説では対応点 を もたな くて も擬似 的 に 融合す る線分 は鼻側 と仮定す るの に対 して,カ
‐
1080
‐720'30 p*i,i&tpn*13@
‐2 ■5 ‐1 ■5 0 05 1 15 2
Positt tde8‑)
図
8 1次
元のガボール プロフ ィール. ステレオグラムでは,両眼視差はphase disparityで
操 作 され,また コントラス ト・エンベロープの大きさ(0が
変えられた(Prince,s.J.D。 &Wagle,R.A.2000).図
9
二 重 融合 仮説 (図a)と 力'モ
フ ラー ジ ュ 仮 説 (図b).両仮説 とも片眼の 1本 の線分が他眼の 2本 の線分の両 方 と融合する点では一致 しているが,二重融合仮説で は対応点をもたなくても擬似的に融合する線分は鼻側 と仮定するのに対 して,カモフラージュ仮説ではそれ をこめかみ側 と仮定する (shimonO et」
1999)。
A国 画m…
Bo Cmo17fle`
甲』口曲下
d
R山 l晰
国
□
ヽ G画円四述電
inw′/呻日日
円︑ ぃ
モフラージュ仮説ではそれをこめかみ側 と仮定 する。 したがって,図9に も明示 されているよ うに,二重融合仮説では擬似的融合線分は,対
応点をもつ融合線分の背後 に定位 されると仮定 するが,カモフラージュ仮説ではそれを手前 に 定位 されると仮定する。また, どちらの仮説 も 片眼の2本線分のステ レオグラムの線分間の間 隔距離 に比例 して融合線分 と擬似的融合線分 と の視 えの奥行距離が増大することを予測する。
Shimono,Taln&Nakamizo(201は
,2つ
の仮説の いずれが正 しいかを,疑似的融合線分 と融合線 分 との奥行関係,2本
線分のステ レオグラムの 線分間距離 と奥行距離量 との関係 を検討 した結 果,二重仮説条件では融合線分は擬似的融合線 分の手前 に,カモフラージユ仮説では融合線分 と擬似的融合線分 とは同一の奥行距離 に定位 さ れて知覚 されること,また2本線分のステ レオ グラムの線分間距離が増大 しても融合線分 と擬 似的融合線分 との奥行量は変化 しないことが示Stimulus plane Fused stimulus
□』\ Retinalimages/□
図
10
ノく一 ヌム の 半端 ス テ レオ グラム 問題 に つ いての新 た な仮説.片眼の 2本 の線分のいずれかは他眼の 1本 の線分 と融 合 して定位 されるが,他 方の線分は対応線分をもたず 擬似的にも融合 しない。融合線分は刺激面に定位 され て知覚 されるが,非融合線分は輻榛面 に定位 されると 仮定 し,また融合線分 と非融合線分の間の奥行定位量 は輻榛 に誘導 された両眼視差量
(融
合線分 と輻榛面 と の間の視差量)と
ともに増減すると予測する(shimon。
et a1 1999)。
された。この結果は,二重融合仮説では融合線
分 と擬似的融合線分の奥行定位関係 は支持する が,2本 線分のステレオグラムの線分間隔距離 と 奥行量 との関係 は支持せず,また カモ フラー ジュ仮説では融合線分 と擬似的融合線分の奥行 定位関係,並びに2本線分のステレオグラムの 線分間隔距離 と奥行量 との関係の両方を支持 し ていない。そこで,Shimono達は,新たな仮説 を 提示 し検証 した。それによれば,片眼の2本の 線分のいずれかは他眼の1本の線分 と融合 して 定位 されるが,他方の線分 は対応線分 をもたず 擬似的融合 しない。そ して融合線分は刺激面 に 定位 されて知覚 されるが,非融合線分は輻榛面 に定位 されると仮定する(図10参照
)。
この「誤 つ た輻榛 による奥行定位説」 を実験的に検証する ために,両眼視差 は融合線分 (視差はゼロ)と 実際の輻榛面 との間に くるように操作 し,融合 線分 と他の非融合線分 との奥行位置関係,およ び輻榛誘導に伴 う両眼視差 と融合線分―非融合 線分 との間の奥行定位量 を二重融合仮説条件 と カモフラージユ仮説条件布置のステ レオグラム でそれぞれ測定 した。その結果,二重融合仮説条件 とカモフラージュ仮説条件のステ レオグラ ムとも,融合線分 と非融合線分の視 えの奥行位 置関係,および片眼の2本線分のステ レオグラ ムの線分間距離 と奥行量 との関係は,予測 され
た通 りの結果 を示 した。このことか ら,パーヌ
ムの半端なステ レオグラム問題 には,ステ レオ グラムの刺激布置,片眼の2本線分のステ レオ グラムの線分間距離に加えて,輻軽 に誘導 され た両眼視差要因が ともに関係 していることが明 らかにされ,この新たな仮説が支持 されている。
2.4.左
右 網膜上 で の対 応 す る位 置 に投 影 され た対 象 の視 え方Whettstone(1838)の 古典的論文には,左右の 網膜上での非対応な位置に投影 された対象は両 眼融合 され,あるひとつの奥行位置に定位 して 視 えること,また左右の網膜上での対応する位 置に投影 された対象は相異なる奥行位置 に定位
Nonfused stimulus
されて視 えることを定式化 した.Ono et al(り は,
とくに左右網膜で対応する部分が相異なる位置 に定位 して知覚 されることを検証するために,
図
Hの
上図 ようなRDSを作成 した。 このステ レオグラムでは,垂直な破線で表示 した対象が, 左右の網膜上で対応する。図の下図は,このス テレオグラムの2つの可能な視 え方を示す。下 図の左 は網膜上で対応する部分が2つの相異な る位置 (方向)に視 える Wheatstoneの 定式 に そった知覚的解決 を示 し,右はどちらかの網膜上の対象の方向が全体の視えの方向を優位 に規 定するという考え方にそった知覚的解決 を示す。
観察の結果,Whettstoneの 定式 にそった視 えが 生 じることが確認 された。
図 11
上図:このステレオグラムでは,垂直な破線で表示 し た対象が,左 右の網膜上で対応する位置に投影 される
(実
際はランダム・ ドッ ト・ ステ レオグラムである)。
下図
:こ
のステレオグラムの 2つ の可能な視え方を示 す。下図の左 は網膜上で対応する部分が 2つ の相異な る位置(方
向)に 視 えるWhcttstoneの定式 にそつた知 覚的解決 を示 し,右 はどちらかの網膜上の対象の方向 が全体の視えの方向を優位に規定するという考え方に そった知覚的解決 を示す(OnO,ct J 2000)
2.5.対
極 コン トラス トで作 成 され た ス テ レオ グ ラ ムの立体視片眼用のステ レオグラムが黒色,他眼のそれ が自色で作成 されたステレオグラム (対極 コン トラス トのステレオグラム)を両眼立体視する と,それが フイギュラルステレオグラムの場合 には立体視が成立するが
,RDSで
は立体視は成 立 しないことが確認 されている (Julesz 1971,Stuart et a1 1992)。
フイギュラルな対極 コン トラス トステレオグラムで立体視が可能なのは,対
極 コン トラス トの輪郭についての対応が可能な か らではな く,対極 コン トラス トに近似 した輪 郭が,実際 には検出 されるか らと考 え られた。
RDSタイプの対極 コントラス トステレオグラム で立体視が不能なのは,輪郭の検出が フイギュ ラルタイプに比較 して複雑す ぎるか らと説明さ れる。
そこで,Pope et al(01ま,コサイン波形 と矩 形波形の輝度変化 をもつ対極 コン トラス トステ レオグラムで,左右ステレオグラムのコン トラ ス ト比 を
40%,60%,80%,100%の
4段階,刺 激提示時間を0.2,0.5,1,2,4秒の5段階に設 定 し,正しい立体視の生起頻度 を求めた。その 結果,(1)低 コン トラス ト条件では,刺激提示時 間が短い場合 にのみ,立体視が可能 となること, (2)しか し,高コン トラス ト条件で も,コ サイン 波形のステレオグラムの刺激提示時間を長 くす ると立体視が可能であること,(3)低コン トラス ト条件で,矩形波形のステ レオグラムの刺激提 示時間を長 くす ると立体視が可能 となること,などが見いだされた。これ らの結果か ら,両眼 立体視 には,ト ランジエ ン トとサステイン ドの2 つのメカニズムが存在 し,前者は対極 コン トラ ス トステレオグラムで輪郭 を検出で きるが,後
者は検出で きないと考 えられる。
2.6.生
態光学的に無効な単眼領域 とRDS立
体視刺激対象を立体視するとき,その大 きさが眼 球間距離より大きい場合には,各眼で固有の相
=H口田
噸 t摯
学
互に対応のない遮蔽領域がで きる。ステレオグ ラムで対象 を水平方向にシフ トして水平視差 を 作 り出 した場合,ステ レオグラムのそれぞれの 対象のこめかみ側 には両眼間で対応の無いこの 種の遮蔽領域が必ずで きる。これまで,この種 の領域は両眼間で対応 を持たないため,両眼立 体視 の成立 を困難 にす ると考 えられて きたが,
RDSの左右の対象のこめかみ側 に単眼遮蔽領域 を設定すると,その立体出現の潜時が短 くなる ことが示 された (Glllaln&Borsing 1988),生 態 光学的に生起する単眼遮蔽領域は両眼立体視の 成立 を促進すると考えられてきた。
これに対 して,Grove&Onoけ)は,Ginalnら の研究 と同様 に,左右のステレオグラムの一方 の単眼遮蔽領域 を空白にした条件,それを立体 出現する対象や背景にある ドッ トパ ターンと同 一にした条件,それを立体出現する対象や背景 にある ドットパ ター ンと相違 した条件の3種類 のRDSを作成 し,その立体出現 までの潜時を測 定 した ところ,Gillamらの結果 とは相違 し,単
眼遮蔽領域 にパ ター ンが存在することによる立 体視促進効果は得 られなかったとい う。ただ,単
図12
交差視差で両眼融合 した場合,右側のパネルが左側の パネルより近 くに出現 して視 えるRDSで,その単眼 遮蔽領域の ドット密度 を粗/密に変化 して,生 態光学 的に適切 な条件 (a)と不適切条件 (b)を 設定 してあ る (Grove,P.M.&Ono,H.1999)。
眼遮蔽領域が立体 出現す る対象や背景 にある ドットパ ターンと同一のRDSと,それが相違す る条件では,後者の方が立体出現の潜時は有意 に長 くなった。そこで,単眼遮蔽領域 に付加す
るパ ターンに生態光学的に適切な条件 と不適切 条件 (立体出現する対象の遠/近に対 して単眼 遮蔽領域 に付加 したパ ターンの密度 を変化 し生 態光学的適切性 を操作)を設定 したRDSを作成 し(図12),そ の潜時を測定 したところ,生態光 学的に適切条件のRDSは不適切条件 より有意に 短いことが示 された。このことか ら,単眼遮蔽 領域が両眼立体視 に影響する要因であるかを論 じる場合 には,その領域が生態光学的に適切 な パ ターンが設定 されているかどうかの観点か ら 検討する必要性が示唆 されている。
2.7.背
反 す る輝 度対 応(an暫 ‐correlated)条件 の立 体視 と 運 動 視 にお ける対 応 問題
左右のステレオグラムか ら立体 を復元するに は,左右パ ターンのどれ とどれが対応するかを 解決 しなければならない。この対応問題は,2つ のフレームにまたがる ドッ ト・パ ターンか ら特 定のパ ターンを復元するときにも同様 に生 じる。
立体視のシステムと運動か らのパ ターン復元の システム との間には,明るさ対比感受性,立体
視や運動か らのパ ターン復元 に関わる閾値であ るDm銚 とD面n,ラ ンダム・ ドットの密度 と ドッ トの大 きさについての視覚特性が類似すること が明らかにされている(Glennerster 1998)。 さら に,この2つのシステムの間には,空間周波数 チ ャンネル特性が神経生理学的,あるいは精神 物理学的に類似する (Eagle 1997,Prince et al 1998,Yang&Blake 1991)。 しか し,背反する輝 度対応条件 については,両システムはその特性 が異なる。背反輝度ステ レオグラムの場合,ドッ
ト密度が粗い場合 には,立体視が正 しく生起す るが (COgan et a1 1995), ドット密度が濃い場合 には,立体視は成立 しない(Julesz 1971,Cullll―g
et d 1998)。 運動視の場合 には,映画の ように1
図13
フレームごとに背反する輝度か らなる ドッ ト・
パ ターンを提示 しても,奥行方向の反転が起 き る ものの,明瞭 な運動が知覚で きる (Anstis 1970,Sato 1989)。 Read&Eagle u"は ,背反輝 度ステレオグラム
(and¨
coΠelated stereogram)と 背反輝 度 キネマ トグラム (anti―corelatedkinematogram)と を作成 し,立体出現時の奥行方 向 (交差/非交差)も しくは運動出現時の運動 方向 (右方向/左方向)の判断 を被験者に求め
背反輝度ステレオグラムと背反輝度キネ マ トグラムで使用された刺激パターン. 右側 の図 は1次元
(垂
直方向)のパ ター ン,左側 は2
次元パ ター ン (Rcad,J.C.A.&Eaglc,R.A.2000)。図
14
ダイナミ ック・ランダム・ドッ トか ら構 成 され,その ドッ トに持続系,過渡系の それぞれ に適 した変調をかけたステ レオグラム.
実験では,テス ト刺激として設定 した矩形の大さと視 差を操作 して,それがダイナミック・ランダム・ ドッ
トで構成された背景の手前に見えるか,背 後に見える かがしらべられた(Kontsevich,L.L.&Tyler,C.W.2000).
た。刺激は,フーリエ空間で,1次元(垂直方向
)
と2次元の画像パ ターンが作成 された (図 13).
実験の結果,1次元パ ター ン条件では,背 反輝度 ステレオグラムと背反輝度キネマ トグラムとも,
奥行方向 と運動方向の弱い反転 を伴 うものの,
立体視 と運動視が生起 したが
,2次
元パ ター ン 条件では,背反輝度キネマ トグラム条件では反 転 を伴 う運動視が明瞭に知覚 されたが,背反輝度 キネマ トグラム条件では,立体視 は生 じな かった。 このような相違は,視覚 システムが対 応問題の解決を試みるとき,方向が異なる空間 周波数情報の統合の問題 に関係 して生起すると 論 じられている。
2.8.両
眼 立体視 処 理 過 程 にお け る持 続 系 (sustained pathway)と 過渡 系 (transient pathway)外佃1膝状体 には,大細胞層 (magnocellular pathway)と 小細胞層 (parvocellular pathway)が あ り,前者は比較的大 きな受容野 をもち,過渡
的な刺激に対 して感受性が高いが,一方,後者 は高解像度特性があ り, しか も持続的な刺激に 感受性 をもつ。これまで,サルを対象 とした研 究から,両眼立体視処理は大細胞層で行われて いると考えられてきた(Hubel&Livingston 1987, Livingston&HubeH987)。 しか し,大細胞層は
外傾1膝状体ニューロンの10%程度 しかないこと を考慮すると,両I艮立体視 という大容量の情報 処理 を担 っているとは考えに くい。神経生理学 的には,大細胞層は,両眼立体視処理の中の解 像度の低い しか しダイナ ミックなレベルの処理 に適 し,小細胞層は解像度の高い しか も静止刺 激の処理 に適 している。Kontsevich&Tyler(H) は, ダイナ ミック・ランダム・ ドッ トか ら構成 されたステレオグラムを作成 し,その ドットに 持続系,過渡系のそれぞれに適 した変調 をかけ て提示 した。実験では,図14に示 されたように,
テス ト刺激 として設定 した矩形の大 さと視差 を 操作 して,それが ダイナ ミック・ランダム・ドッ トで構成 された背景の手前 に見 えるか,背後 に
見えるかが しらべ られた。矩形の大 さと視差 と の トレー ドオフは,大細胞層の場合 と小細胞層 の場合 とで,図 15のように異なると予想 される。
実験の結果は,この予想 を支持 し,両眼立体視 は,持続系で処理 されていると結論 されている。
2。 9.対
応 問題 と トラ ンジ ェン ト系 ステ レオグラムにおいて左右眼の どの部分が 対応 をもつかは,両眼立体視の処理過程 を考えるとき基本的問題である。いま,図16のような サイン波形の空間周波数か ら作成 されたステレ オグラムの対応問題 を考えるとき,左眼のステ
レオグラムのA点ともっとも対応する可能性が 高いのは,右 眼のステレオグラムのB点(90° の 分離)と で,次がc点との対応
(360°
‑90° で270°
)で ある。このステ レオグラムを使用 し,ス テレオグラムの大 きさを15° と30° の2段階,空間周波数 を
o。
3,0.6,1.8cPdの 3段階,刺激提示 時間をo。
4秒と9秒の2段階をそれぞれ設定 し て,実際 にはどのような対応が選択 されるかがしらべ られた (Edwards&Schor 6))。 その結果,
(1)刺激時間が短時間な場合には最適対応 (A―B 対応)と 次善対応
(A―
C)対応が生 じるが,それ が長い場合 には最適対応 しか生 じないこと,(2) 両眼視差 を小 さくすると次善対応が生 じにくく なること,(3)最適対応 に関係する両眼視差は空 間周波数 における位相要因が重要であること,などが明 らかにされた。 これらの結果か ら,両
眼視差 に同期する検出器のモデルが提案 された
(図17)。 ここでは,2つの検出器が仮定 され,一 つは狭帯域 に同期するもの(実線で表示),他は 広帯域に同期するもの (破線で表示)で ,前者 は小 さい視差 に対応 し,後者は大 きい視差 に対 応 す る。実験 で使 用 され たス テ レオ グ ラム
図
17
両 眼 視 差 に同期 す る検 出器 の モ デル. ここでは,2つの検出器が仮定 され,一 つは狭帯域に同 期するもの(実
線で表示),他は広帯域に同期するもの(破
線で表示)で ,前者は小 さい視差 に対応 し,後者は 大 きい視差に対応する(Edwards,M&Schor,C.M.1999)。Pam ∞
rtmiBar"udth
Magno contro:
T笙
sa/.Bar価
≧ g ﹂ a
図
15
矩形の太 さと視差 との トレー ドオフ,大細胞層の場合と小細胞層の場合とでは,それらの関
係 は 異 な る と予 想 さ れ る
(Kontsevich,L.L.&Tyler,CoW.2000).
Lm‐Eye tte
RIntoEye har
図
16
サイ ン波形の空 間周波数か ら作成 され たステ レオグラム.この対応問題を考えるとき,左 眼のステレオグラムの A点ともっとも対応する可能性が高いのは,右 眼のス テレオグラムのB点 (90° の分離)とで,次がc点
との対応 (360° ‑90° で270°)である (Edwards,M
&Schor,C.M.1999)。
(stimulusl)で は,最適対応は90°,次善対応は
270°
に設定 されていたので,狭帯域検出器は最 適対応 を検出するが,次善対応は狭帯域外なの で検出 しない。 しか し,検出感度は広帯域検出 器 による ものの方が大 きい。対応が22.5° と337.5°
のステレオグラムのケース(stimulus2)も同様 に説明で きる。
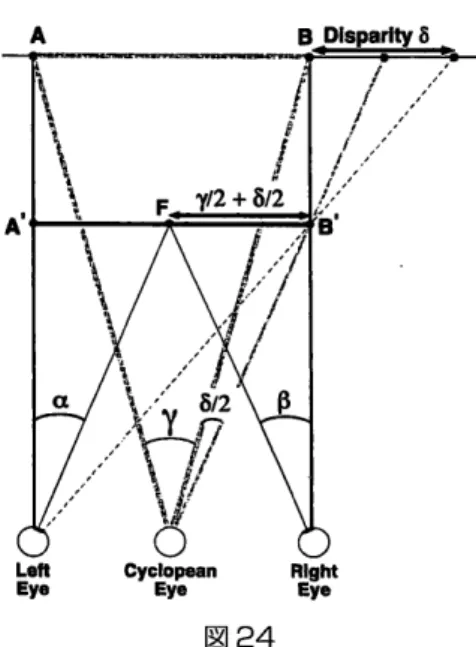
2.10.両
眼立体視 下 で面 の形状知 覚 を不 能 にす る最大両 眼視 差量 の大局 的 規定要 因大局的両眼立体視で出現 させた面の形状が識 別で きな くなる最大両眼視差量の規定要因とし て,空間周波数視差 (disparity spaid hqucncy)
と視差勾配 (disparity gradent)と が挙げられて いる。視差勾配 とは,水平方向視差量 とキクロ ピアン距離の比 をいい,キクロピアン距離 とは 立体視出現時の2つの対象間の距離 をさす。こ れまでに,視差勾配の値が 1を 越えると両眼融 合が不能 となること,立体視が可能なサイン波 形の最大振幅は空間周波数 と反比例の関係 にあ る理由を視差勾配で説明で きること (Burt&
Julesz 1980)などが明 らかにされている。Ziegler
et al。
0は,こ の視差勾配で両眼立体視 された面の形状の識別が不能になる最大視差量 を説明で きるかを検討 した。ステレオグラムは台形波形,
三角波形,サイン波形,矩形波形で構成 し,そ の振幅 を操作 して,立体視が不能 となる最大視 差振幅 (dmax)を測定 した。その結果,大局的両 眼立体視下での面の形状知覚 を不能にする最大 両眼視差は,視差勾配によつて規定 されている
ことが確認 されている。
2.11.観
察者 中心記 述 と対 象 中心記 述 対象の認知の研究では,対象が′い的に2次元 で記述 されているか(観察者中心記述),そ れが 3次元であるか (対象中心記述)が問題 となる。Phimey&Siegel(0は ,最初に提示 した対象か ら形成 される内的表象を,次に提示する対象か
ら形成 された内的表象 と照合で きるかを検討す
0‐暉 赳
…
Of融
0田躙回おOf… O St―
忘Я
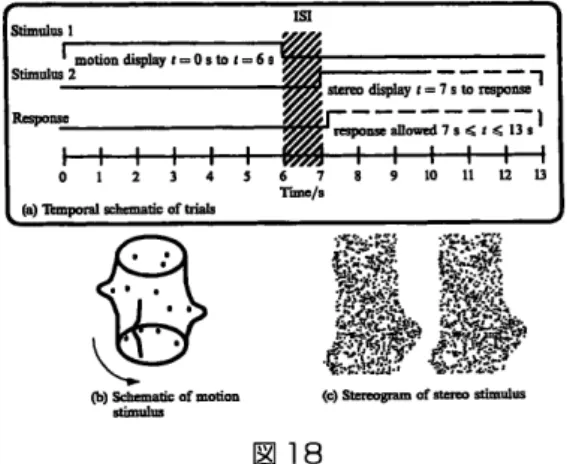
― Of mmo allllls図 18
(a)運動か らの対象復元手法で作成 して提示 した対 象。これをは じめに観察 させ,引 き続 き2次元的手が か り単独,3次元的手がか り単独,2次元的手がか り
と3次元的手がか りの両方で成立 している対象を提示 し,最初の対象 を正 しく識別で きるか をテス トす る。
(b)運動か らの対象復元手法で作成 された対象 と両眼 視 差 か ら の 対 象 復 元 手 法 で 作 成 さ れ た 対 象
(Phinney,RoE.&Siegel,R.M。
1999)。
るために,まず運動か らの対象復元手法で作成 した対象を観察 させ,引き続 き2次元的手がか り単独,3次元的手がか り単独,2次元的手がか りと3次元的手がか りの両方で成立 させた対象 を提示 し,最初の対象を正 しく識別で きるかを 検討 した。この手続 きでは,対 象についての2次 元的手がか りを全 く欠 く運動刺激か ら形成 した 対象の内的表象 を,2次元的手がか り(ドットで 構成 される輪郭やシルエ ット),3次元的手がか り(両眼視差),あ るいは両方の手がか りで示 さ れた対象 と照合 させることがで きるかが試 され た。実験で使用 した手続 きと対象図形は図18に 示 されている。実験の結果,2次元的手がか り単 独条件,3次元的手がか り単独条件,2次元的手 がか りと3次元的手がか り加算条件のいずれに おいても正 しいマ ッチイングが行われることが 示 された。人間の視覚システムは,対象の内的 記述 とのマ ッチ イングでは