九州大学学術情報リポジトリ
Kyushu University Institutional Repository
ロボットハンドを用いた物体操作における操作対象 のセンシングに関する研究
本田, 久平
九州大学システム情報知能システム工学
https://doi.org/10.11501/3180412
出版情報:Kyushu University, 2000, 博士(工学), 課程博士 バージョン:
権利関係:
第4章 センサ統合による対象の位置姿勢計測
4.1
はじめに
第3章で提案した視覚による位置姿勢計測では, 獲得される視覚情報が少なくなると, 安 定で精度のよい計測結果が得られなくなるとしづ問題がある. また, 対象の形状や視覚デー タの計測される面によっては, 確定できない自由度が生じるという問題がある. これらの問 題を解決するために, 複数のセンサからの情報を視覚情報と統合する手法を開発した.
本章では, まず, 各センサの計測機能について述べる. 次に, センサ統合による対象の位
置姿勢計算手法について述べる. 最後に, 提案した手法を検証する.
4.2
センサ統合による位置姿勢計算
4.2.1 接触覚による計測
指が対象に接触して操作しているとき, その接触情報は, 対象物体の位置姿勢計測に利用 できる. 物体と接触している多数点の3次元位置が得られれば, それだけで物体の位置姿勢 を決定できるが, そのような多数の指をコンパクトな空間に配置するのは困難で, 各指が相 互に運動の邪魔になるし, コストの面からも現実的でない. そこで, 接触情報を3次元視覚 情報と統合してセンシングする手法を提案する.
本研究では, 指先が半球形状を有する多関節指を用いている(Fig.4.1) . 指先半球の中 心位置は関節角度から求めることができるが, この関節角度は信号として安定で精度がよい.
得られた指先中心位置から物体表面までの距離が半球の半径に等しいので, これを制約とし て視覚で得られた3次元計測データと併用することにより, 対象物体の位置姿勢を求める. こ のとき対象物体と指先との接触の有無は, 力覚センサにより知ることができる.
指の先端を半球にする第一の理由は, 球面が接触している操作対象に自由な転がり接触を 許すため, 一般性のある操作が可能になるからである. 例えば, 指先が平面であると, 面接 触により安定な把握ができるが, 逆に対象の位置と姿勢に強し\拘束を与えることになる.
方, 個々の指の関節は少ないので, 操作対象に任意の動きを実現できなくなってしまう. 本 研究では, 操作機能上の理由から実現された指先球面形状を利用して計測を行っており, 接
置望 圃圃圃
4.2. センサ統合による位置姿勢計算 41
触情報を得るために, 指制御に本来必要なセンサ以外の特殊な接触センサは不要である. ま た指自体は, 物体を把握し操作するのに必要な動作以外の特殊な動作をする必要もない. こ れらは大きなメリットといえる.
Fig.4.1: Tactile information
4.2.2 距離党による計測
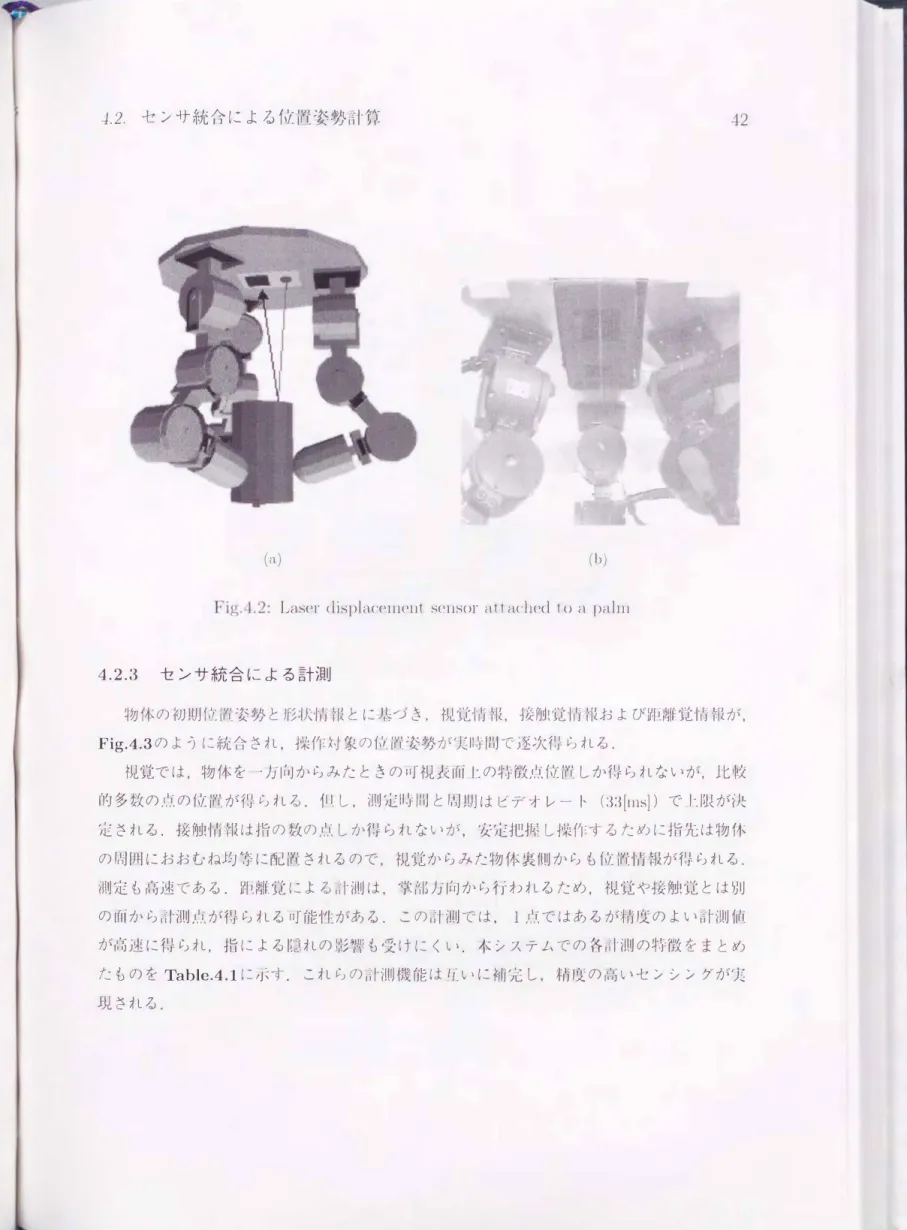
工場での製品検査などを目的として開発されたレーザ距離覚センサを, ハンドの掌部に搭 載し, 掌部から対象までの距離を計測する(Fig.4.2) . 掌部に搭載する理由は, 計測が隠れ により不可能になることがほとんどなし\からである. アームなどによりハンドが移動する場 合でも, 掌部に搭載したセンサも一緒に移動するため, 静止している場合と同じ計測条件が 得られる. また, 掌, 視覚センサおよび指先の配置関係から, 視覚や接触覚による計測とは 別の計測面が得られるという利点もある.
4.2. センサ統合による位円姿勢Itr鈴
、、‘,,,F、,、-e r--、
42
、、,E,J、Jl ''tt、
Fig..J.2: LHS('l・displacl'llH'llt �('ll討or H t t êwhcて1 t 0 (ì !Jë1hll
4.2.3 センサ統合による計測
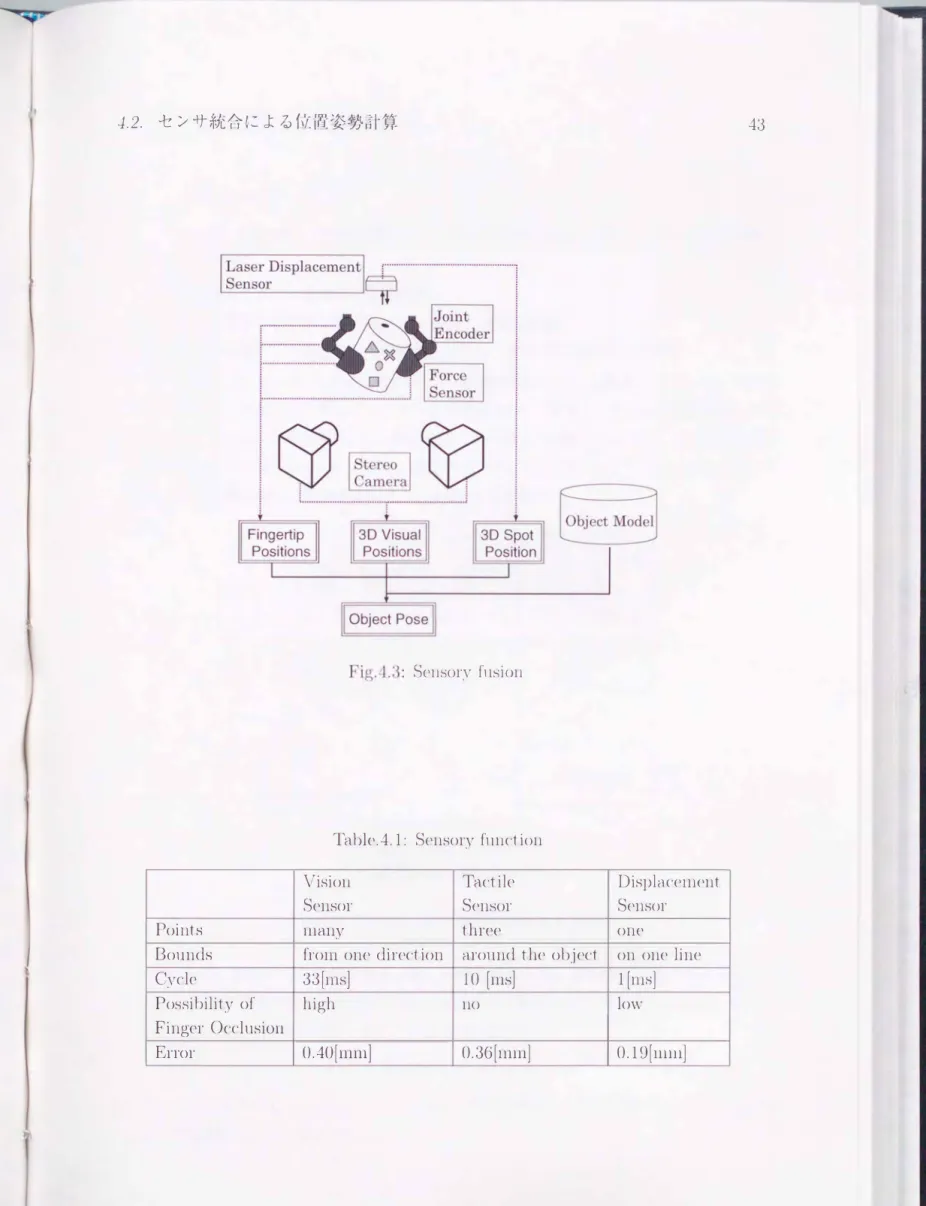
物体の初WH\l.in姿勢と)r��)とI','j 'fliとにjtづき, t>�j!↑,'j fli, -t長í191ji'I',Jjmおよび、距離党↑!?出が,
Fig.4.3のように統介され, 操作対象の佐川姿勢がゾミIl.jllUで、)f次何られる.
祝党では, 物体を ゾ71句からみたときのI1J制点!日I�の特徴人�1\/:ínしか何られないが, 比11攻 的多数の/,(の1\1=i[i'�がf!?られる. イII_し, 測定時!日!と同HJJはビデオレート(:33[lllS] )でI--I�Rが決 定される. 接触'[','1限はJHの数のよI,I�しか作られないが, 交定J�羽毛し操作するために指先は物体 の同聞におおむね均等に配附されるので, 悦党からみた物体哀側からもl\L il{情報が得られる.
測定も高速である. 距離党によるI�1-?J[IJは, 空j"fl))JIÎ'Jから行われるため, 制党や接触党とは別 の面からIH測/(が作られる可能性がある. この1\1-iHlJでは, 1点ではあるが村皮のよい計iJ1lJ11�I が高速に得られ, :tf1によるli3れのl;t��w�も受けにくい. 本システムでの各l汁測の特徴をまとめ たものをTable.4.1にぷす. これらのI�;1-i!llJ機能はllし】に補完し, 精j支の|;;れEセンシングが実 現される.
4.2 センサ統合による位置姿勢計算
43
匂
…Fig.4.3: SCllsory fllSiOll
Tablc.4.1:
Sensory functionVisioll Tact.ile Displacernent
Sensor Sensor Sensor
Points r n
a
ny thrce oneBounds fron1 one direct.ion around the object on one line
Cycle
33 [
n1s] 10 [111S] 1 [
n1s]
Possibility of high no
l
owFingcr Occ 1
USi011
Error
0.40[111111 0.36[111111] 0.19[111111]
センサ統令による位附姿勢計算
44 4.2.および距離党情報の統合下法について述べる. 1立円安 Newton法
ここでは, 悦党情報 , .J長f��りひ1�'Þlt 勢計算の際には,
(1)十�U:t'h1出として/1-:机/.(の3次元位|宵,
(2)後削!党情報として、|三球状(、|三作?γ)の指先の111心位置,
(3)距離党情版として対象ぷláÎ I�に投影されたレーザスポットの3次JC位院
をmいる '1需11 (i = [1..71]) のn:制点の3次JL:1\�( 17�をZ刊とし, .J書11 (.J
=
[1・.rn]) の指のXviと対応1Mとの�II また
Xfjから11'I.t�:されるJた削!},I,ï, í心:iytと対L�"I(lÎとの�IIll�lf:.をGfJとし, Xιと�J!,�"I(liと の�I�mlf:.をG/.とする(Fig.4.4). {I�Jト:来�tをIIJいて, 2:;Llcil+2:;11l c
j
l+GIを小さく するように対象物体の似ii"t:安勢p(n. ,).づI).(}.")を決定する.4.2.4
レーザスポットの3次Jl: í \J: i �'�をXl.とする.
'1'心1\/: li'tをXfjとし,
肉If:.をG!'iとし,
G 二
)九月j /r---""__F工nge / /
\
/'・Xfj[�L
l• Fingertip Position
o 3D Visual Position
へ、 「4 q .\
/・f, , 〆 以 内 , , 、 ぺ / 巧 /トし \ ,
xl
, O
、 i
r H
一 /
\ 乃 J
。ovh一n+ 一 + ::! 、 一 m - aTU
- n
-i -QU L \
礼
」 F 凸U r、 、、hlltJ/ d e \ コ X X O \ \ h
\ /
+し 、1 -
\ /
、、 aιμ
民
、
・1一;';::'
n r Ar4f~印u//xts ノ/司
d
E削 ,
一M?Qo 3D Laser Spot Posi tion
Fig.4.4: S('n討ory infonna tiOll on a (ウ'linclcr
中心rliltlの)J向ベクトル及び'UIIl
|リれの、1:筏を1'0' 例として, 物体がPHì:の場介を与える.
n, qは, 物イ本の (Fig.4.4) . ここで,
仁のlつの点の位置ベクトルをそれぞれn, qとする
11 JれJ�1M の)j程式が また
位置姿勢pを月jし3て計算される.
α.1: + by + cz十d=O
ここで,α, b, c, dは, 物体!恒標系における、F耐のパラメータと, 物 体の位�そ姿勢pによって決定される.
で表されているとする.
4.2 センサ統合による位置姿勢計算 45
ここで, 注視点が円筒面に載っており, 指先が円筒面と接しており, レーザスポットが円 柱上面に存在していると仮定する. このとき, 距離Gvi, 距離GJjおよび距離GLは,
となる. 但し,
である.
Gvi 二y'Uvi . Uvi - To Gfj二、/Ufj . ufj -(γ。+アf)
GL = IαXL + bYL十CZL+ dl
Uvi = X vi - q - {( X vi - q) . n} n
U Jj = X Jj - q - {(x fj -q) . n}n
XL二(XL,YL, ZL)T
(4.1 )
(4.2) (4.3)
ここで, 3.5.1節での手法と同様, 反復修正により物体の位置姿勢pを求める• Gvi の変化 分ムGvi' G fjの変化分ムGJj, およびGLの変化分ムGLは次のように表される.
θGvi θGvi A n 8Cゴ ムGvi 一一一ムα+一一一ムß+一一三ムγ
θF θγ
θG川 βο… βο…
+ーーとこムp十一一三ムq十一ーとムァ
θp θq θァ
βοrぷ βοf,; . _ 8G (,j ムGfj = -ziムα十一-J jムß+ � --; Jjムγ
8a θP θγ
θGfィ θGι θσh +-ziiムp十一古iニLムq+ ーォ..:!....:!...ムァ
op oq σァ
θGL βοr βGL
ムGL -:'1.Jßα+ーニムß+ーニムγ
θα θ3 δγ
θσr βοr βοr
十一ーニムp+一ーとムq+一ーとムァ
θp θq θ7・
式(4.4), 式(4.5)式(4.6)をすべての測定点に対して求め, 並べると
A d = 9 となる. 但し, Aは(n+m+1)x6の行列で,
d = (ムα?ムß,ムγ?ムp,ムq,ムァ)7
9 = (ムGv1γ ・•,ßGvn,ムGf1,・・・?ムGfm,ムGL)T
(4.4)
(4.5)
(4.6)
(4.7)
4.3. 実験 46
である.
計算の手iII買は, 次のようになる.
Stepl位置姿勢pの推定値台を与える.
Step2 Þとすべての測定点から行列Aの要素を求める. また, 式(4.1)(4.2) (4.3)のGvi,
Gfj, GLのイ直を求め, それを式(4.7)のムGvi, ムGfj, ムGLの値とする.
Step3式(4.7)を解いてdを求め, dをfHiÆイI{[ρに加算し, 次の反復計算の推定値台とする.
Step4 Stcp2 -Stcp3を収点するまで繰り返す.
4.3
実験
4.3.1 キャリプレーション結果
Data Number nu nu nU 6 5 4
Data Number
20
10 5
15 30
10
。 m m
OM 2H Fト」ρしva'EL Hu nu cu hυ 八円ハU4EE'
。 nU 1A hU cu o u 恰O 円/」仁」 VE『VE' VE' O nU 門Jfi m m
(a) Fi略目 (b) Las<?l
Fig.4.5: Error distribution
3次元iHlJ定保をj甘いて, 指とレーザ変1\J:センサのキャリプレーションを行った. 指先位|買 計算における計算他と実浪IJイlEとの訟追分布をFig.4.5(a)に示す. 指先位置計算の誤差の絶対 値の平均は0.36[mrn], 標准偏差はO.17['mrn]となった. また, レーザ変位センサからのデー タを処理し, レーザスポットの3次元位置を計算した時の, 計算伯と'夫測伯との誤差分布を Fig.4.5(b)に示す. このときの計算誤差の絶対値の平均は0.19[mrn], 標準偏廷は0.05[mrn]
となった.
4.3 実験 47
4.3.2 隠れがない状況での計測:誤差評価
円柱(直符40[111111], 高さ125[m111] , 表面模線なし)を直立させた状態で, 多関節多指ハ ンドに犯握させ, その位肯と姿勢の計視IJ;ÆI倹を行った.
濃淡パターンを照射し, 作ノぐターンを?E侃l.(としてステレオ計測する. この実!倹では指に よるもの以外の隠れはない. 100フレームlI.f問の連続計測では, 注視点管埋により各フレー ムで15点の視覚計測データが得られ, センサ統合による計測ではさらに3 }主の指先位置情報 が加えられる.
Fig.4.6は, ;�hJ!lJされた物休校恨のうち, x '!4hr瓦分(悦党からみた奥行き)j InJ)の出足の 変動の係{-をぷす. 1:;.(1'1' ,1.\紋は十J�'jl'!','J 仰のみによる,Hil1iJの結決をぷし, 夫総は指先iì� ii"tの統 介による,niWJのがi洪をぶす. この場介は,十Jh't'h'fW 1)\ 1づ〉作られており, fJ�j幻r'j'Wのみのl汁 iJ1lJでの,i��):�、Ií..t�)はO.G1[111111],統イ?による,\hl!lJでの以足、|えj力はO.-:l:G[llllll]でjEはほとんどない.
川れi伯而hωiへのパ夕一ンJ投文;彩形による11刊hι机訓j社出山測W川!ド!IJリlでで、は (卜仇lι川k汀i山町1姿炎勢をあらわすGつのパラメ一夕のうち川 tれれì:凶凶:斗: 1'W申幅帆W
l'川l日叶11転t訟;じjE引lはまX帆まわり 0.8叫[clc、官吋巴g], y '!�hまわり 2.1 [dcg] , i\/� i('町凡町(r万(rぷrîぷi l防向白何J Q.4[いm11叫1
2E --Vision
system
一- Fusion system 言1.5E
lo
O lo
凶lo- 1
+-' 0 コ
。ω
£コ
<( 0.5r�
。。 20 40
Frame 60
Fig.4.G: Ì\lcasUrelTICllt err01
80 100
4.3. 'k.!�:矢
4.3.3 隠れのある状況での計測:誤差評価
4
紺.立などの実際の作業では, 侃党に刈ーする隠れが生じる. Fig.4.7に/兵すように対象の a 部の点的iを他の物イ本で隠した状態で, 100フレーム時間計測したとき, 物体1\L ì貴の奥行き)j 向の誤J5をFig.4.8にぷす. 悦党情報のみによる計測(点線)での誤足、|三均は1.0[mm]であ るものの, 仰が大きく変動している - H, 例党'I'lf字I�と接触覚情報の統合による計測(実線) では干均以ぷ0.4[n1111]でしかも安定していることがわかる.
この,�hf!lJでは, 111れのぷITrÎのうち視党,�'hJ1iJができているのは, IIJ十凡夫rÚÎのイi、|三分のうち折 に隠されていない1--庁1)と|、. tH�からの6以 のみであった(Fig.4.7(a)参!!H). このため, 悦党
↑!?械のみのl汁測の場介, 件以のi1[!J山村iのd�'� ),'�変動の;;}�科が大きくなっている. 後削(it'lù Wは 各}.'rの測定,��'� ),'::が小さいのに)jllえ, 物(休4本i什11γTï刷(1川11カか、らも{卜似、ιI�ii"l�守引,的|
あつても, Iむれにより十J�jl'I'I'Í 'Wが少欽しかれJュられないぬイ?にはが'cイ?の矧J洪は大きい. Fig.4.6 にぶした|むれのない状川のソミ!倹でも,ぷな|似χ刈11川(1内リにFi培g.4.7(a吋)でfれ作!午}られたものと1,川I“'i]じJぷ己心ωI(山州(1川IÎí飢1 訂江�îl!!先カか
、
らのiU測H則[IJリ;定じι,点のみJ打了?刊しEあげて少数のデ一夕てで‘イ小{卜仇、ι川,Jt:ii
十杉机j比�j党、Zむ引訂î'幻幻,↑h附1'1、)η|行YF判限liのみの,i刊hJ机礼訓測11刊|リlではJfliCは大きく変動オ る.
(a)
Obslaclc
回国国
AV ム〕i
Lcft Camcra Righl Camera
Projcctor
、、EE,J Lu r'Et、
ig.4.7: Occlllsion by 811 obst adc
4.3. �美験 49
pδFδ &EL4Et ee mm vdvd F、upδnn oo ----A・・・EAFδFδ vh
r1 qu
2.5 E E 」O」」
1111 1111 1111
0.5
20 40 60
Frame 80 100
Fig.4.�: �l(、aSlll'C'lllC'llt行1'01
4.3.4 隠れのある状況での計測:移動物体追跡
1 5 ーーー-- Vision system
-- Fusion system 1
0
E
520民、
、
/ 、/ lI , l、ノ
、 、'、 /,
',"
rベll、
v
-5 、、
-1 0し
。
20 40
Frame
60 80
Fig.4.9: I\leasure1l1cnt of a lTIoving object
次に, ハンドにより犯持物体の奥行きj了|旬の位置を約-10[77un]から約15[m.m]の問で変
4.3. 尖!倹 50
化させた. 奥行き方向の計波IJデータの変化をFig.4.9に示す.
51フレーム口において他の物体による隠れの領域が大きくなったため, 視党情報だけの 計測(点線)では, それ以降の追跡と位同姿勢計算が達成されていない. ゾ], 祝党情報と 媛触情報の統令による吉hWJ (実線)では, 滑らかに追跡が行われており, ほぼJE確に動きを 三!日IJできている.
4.3.5 距離覚データとの統合による計測
本節では, 日11I維党データ統イ?のう坊決を雌認するための'ぷ験について述べる.
パターン投;必による,i'h!!lJにおいては, 対象の形状や111'似1MのキIlみ介わせによっては, 保山 できないイ勺と1'111 iI交が/1:_じることがある. Fig.4.10(a)にぶすように, 付L1'tとJ長削U'tにより 川れのl'J î.�j r(1 iを,l'I-?HlJした場介, I'J村山1IIIIdりの1'11'1ぱと川村山11)JIÎljの動きを決定することはでき ない.
ゾ), レーザ変似センサは, 乍ì\:I)に抗,1まされているため, 視覚によるl汁?WJや筏削!党による
;1hJIIJとはYAなるl(ijからのデータカサ引!}できる111'能↑tがllIい. ここで, f'Hì:の 1-:. 1M部から'Î卜?![iJ データがれ}られれば, [リ十ì: II�II J8Jりの1111111,L;は決?とできないものの, 1リれ制Il)j líl]の動きはiJと去す ることができる(Fig.4.10(b)).
o Vision data
・Tactile data o Laser spot data
'フ
(a)Vision
+Tactile (b)Vision
+Tactile
+Laser
Fig.4.10: Indc白nite cOlnponents of DOF of n1otioll
4.3. 実験 51
以上のことを確認するために, 円柱物体を対象に比較実験を行った. 視覚または接触覚で は円筒面から計測データを獲得し, 距離覚では円柱の上面部から計測データを獲得した . 対 象の位置姿勢計算において, 使用するデータの種類と数を変化させ, 特異値分解(3.5.2節参 照)により, 行列Aの特異値を求めた. その結果をTable.4.2に示す.
9個の視覚データで計算した場合, ゼロでない特異値は4つ(79.0, 42.2, 2.6, 1.3)で,
ゼロである特異値は2つである. これは, 円柱の2つの自由度が決定されていないことを示 す. この視覚データに他の視覚データや接触覚データを追加し計算を行っても, ゼロである 特異値の個数は変わらない.
一方, 距離覚データを用いた計算では, 1個のデータ追加であっても, ゼロである特異値 の個数を減らすことができ, 不定自由度の個数を減らすことができている.
Table.4.2: Singular values
特異値
σ1 σ2 σ3 σ4 σ5 σ6
視覚データ9個 79.0 42.2 2.6 l.3 0.0 0.0 視覚データ1 6個 9l.5 43.0 3.6 l.6 0.0 0.0
視覚データ9個+ 79.7 42.1 2.8 l.8 0.0 0.0 接触覚データ3個
視覚データ1 6個+ 9l.9 43.5 3.8 2.1 0.0 0.0 接触覚データ3個
視覚データ6個+ 66.5 33.4 2.5 l.2 0.7 0.0 距離覚データ1個
視覚データ9個十 79.0 42.4 2.6 l.3 l.0 0.0 距離党データ1個
4.4. まとめ 52
4.3.6 処理時間
指制御も含めた処理時間をFig.4.11にぷす. 指制御システムでは, 転がりJ妾触に息づき,
10
[111
8]
間隔で対 象の位 |究姿勢を推定する. この推定では, 転がり接触が維持されていること を 前 提としており, 滑りが生じる ときには推定 誤差が大きくな る. そのため, 本セ ン シ ン グ システムで計測したイIQを, 33[111S]
I間隔で指制御システムに送信し, 誤差を補償してい る .4.4
Finger conlrol system �I 1伽m
|
ω山tion山ntcorrnn川; f
'|
Pose e邸削帥只M叩ti口巾lma行ma帥1羽a1n 1
)systcm
stunauon :
戸 二
[2加Tactj似訓はωjle
a acq山slt10n ata acqUlsluon 1aじq山sltlOn�
泊蹴制c訂 r叩spotl
羽W耐刷S白ωi山O∞nω飢LFi色・4.11
まとめ
Pl・()('('ssing t Üll('
VW叫al山
+-.15加tnS:
セ ン サ統介による対象の位l究姿勢,}hP-IJシステムについて述べた. 各セ ン サ情報の統合下法 についてまとめ る と以下のようにな る.
(1)操作対象と接触し犯挺している指先の位I;l'ì�情報を視覚情報と統介する )j式を提案した.
この方法は, 指先の、1�-f�J祝日で刈戸象と接触していればよく, t妾触/!�の位置怖 で, 特殊な触党センサを必安としない.
(2) 営 部に熔載したレーザ変 位セ ン サからの情報を統合する 方式を提案した. この)j?去で は, 他センサとは異な る 計波IJ而iが符られ, 対象の位I宵姿勢計測の際に'[-:.じ る 不定11rtl皮 の数を減らすことができ る.
本セ ン シ ン グシステムでの対象の位置姿勢計測においては, 狭!溢環境での祝党に生じる 隠れや誤対応の問題を解決し(第3市) , センサ統合により計測の精度と信頼性を高めてい る
(本草) . この結果, 精度のよい計測イIQが夫1]寺I/Jjで安定に符られている.
第5章 滑りの検出と計測
5.1 はじめに
多関節多指ハンドによる物体操作では, 従来の平行2指ノ\ンドとアームによる操作と異な り, 指先と操作対象との接触状態の制御を通じて, 操作対象と外部環境との接触状態を制御 する. このとき, 操作対象と外部環境との摩擦や衝突などの相互作用が, 指先と把握中の操 作対象との聞に滑りを発生させることがある. この滑りは安定な把持を困難にし, 関節角度 限界への到達を早め, 操作対象と環境との接触状態の認識を妨げるため, 作業エラーの原因 となる.
操作中の滑りが検出できれば, 把持の破綻の前に持ち替えにより把持位置を変更したり,
滑りが生じないように把握力の再設定を行うとい った処置を施すことで, 所望の操作を達成 できるようになる[33,38]. また, 滑りの方向や大きさが分かると, 滑りを積極的に利用して,
より多様な操作が可能になると考えられる[14].
一方, 多指ノ\ンド指先の滑りの検出や滑り量の計測は極めてむずかしい. これまで報告さ れている滑り覚センサや滑り検出手法は, 基礎研究の段階であり, 曲面である指先上にセン サを配置して動的な物体操作を行いながら滑りを検出/計測できる状況になっていなし、-
接触点の移動のない固定把握ならば, 指先と物体との相対位置を視覚などにより計測し て, その変化を滑りとして検出できる. しかし転がり接触を用いた物体操作では相対位置や 接触点位置は変化するものであり, 接触点移動速度は小さくしかも一定でないうえ, 視覚系 の誤差も加わるため, 滑りによる移動のみを抽出し検出するのは極めて困難であった.
これにたいし, 本研究では, 関節角度エンコーダ, 指先カセンサ, および対象物の位置と 姿勢を計測する実時問視覚システムを用いた指先滑り検出手法を提案する. これらのセンサ はいずれも入手容易で, ロボットとして構成したときの耐久性にも問題はないが, 単独で用 いてもノイズが多く誤差は避けられない. これらのセンサ情報を統合することにより, 物体 操作中の滑りの検出のみならず滑り量の計測をも可能になる.
本章では, まず, 滑り検出と計測のための幾何学的な式と力学的な式を導く. 次に, これ らの 式を修正し, 実環境での滑り検出と計測とを可能にする式を導く. 最後に, 対象の持ち 上げ操作における滑り検出/計測の実験について述べる.
5.2. dtり検出)J式 54
5.2
滑り検出方式
5.2.1 原理
本研究での滑り検wの基本原理は, 転がり接触による物体操作の制御ループの, l'で, 接触 点の移動量を計測し, 転がりによる移動分を疋しヲ|いて滑りによる移動量を求めるというも のである. まず, 1巴羽�91の操作対象物体の位Irtと姿勢を, 実時間ステレオ視覚計測と多関節 指の指先位l有情報とから求める(第4ì;t) . 次に物件三友|市と指先との相l王位[買関係から, 接触
l!, 1\[ l'ttを求め, 111;'がりを維持するための折|見JNí;fJ!J静11 �立を求める[63]. この実IJ寺[lU制御の過れ
でJ矧�1},1:�移動ii::を逐次求め, r�.l�がりによる移動11::をjEしリ|いて dtり;ltが,;j-i!!lJされる.
しかし操作対象の似11"":を勢li・h!!lJ1II[はlif:ぷを合むため, ;fJ!J静IJループの1M HJJで作られるd'J-り iifにはJHfAJLできないぷぷが合まれ大3く変動する. ここで, 接触),'.ï.での)Jの�L紋hlÎIJ成分と J妻都�)jlflJ成分にイ守11する. ?','J'りが'1:,じるときは, それらの比がl学:1奈係数と咋しくなる. また,
滑りの)jlr'JもJ主総)Jの)jIÎIJと -放するはずである. f行先)Jはノjトルクセンサでr�'riWJできるが,
J行の注II}j ;lj!J佐IJに1'1:うノイズが山人する. そこでノイズの;:ラ411はしきい似処昭によりtrlJえたう
えで, I二11�)J学条{午を�I:{Jたすときの?'I'fり,nil!lJ:,::を佑分して?','ì'り;i::とする. この)hl�により, ìP_
独ではノイズの大きなセンサ↑!? 仰を統合し, 安定したi什り検i'[J1がI1J能となる.
5.2.2 接触点、における転が、りの運動学と滑り速度
指先と操作対象に|刻するHÆt�l{系をFig.5.1の ように設定する. I:bを慣性系のJJさ刊号HÆ標系,
Z。を操作対象の里心に[r'íIÆされたV�f�W系, I: fiを各JRに1�1'1定されたH�標系とする. I:o, I:.rl
J屯標系から兄たJ妥触人11をそれぞれC01, Cf,とする. I:bから児たε。の位置をXo, I:。の姿勢を R。で表す. I:bから>�たI:fiの位1('tをXfl' I: f,の安勢をRfiでぶす.
接触点は, 指先陀線系での表現と操作対象!坐標系でのぷ現の2通りで表明されるが, これ らは, 基準時十票系乞bからはたときにはIlíJじであるから, ゲく式が得られる.
Xo + ROcOi = Xfi + RflCfl この式を微分すると, 次式が符られる.
VO +ω。x Roco, + R。と0;
= Vfi +ωfl X RflCj'; + Rfiと!i
(5.1 )
(5.2) 判し, 記号 (ω x)は, 外積演算と等価な3 x 3の歪対称行列であり, ω= (ω1、ω2、ω;1)r
5.2. 滑り検出方式
の時,
である.
ご :.:1: 2:fi
Ro... �久�inger i
Fig.5.1: Coordinate systems
r
0 一ω3 ω2
1(ωx) =
Iω3 0 ω1 I L-ω2 ω1 0
J55
転がり接触の場合, 基準座標系から見た, 操作対象上の接触点移動速度と指先上の接触点 移動速度が等しくなる(Fig.5.2(a)). すなわち, 次式が成り立つ.
Roèoi = Rfiとfi (5.3)
転がり接触に基づく物体操作の場合, 式(5.2)と式(5.3)から導かれる式などを用いて,
対象と指が制御される[58].
滑りが生じる場合, 式(5.3)は成り立たない(Fig.5.2(b)). このとき, 滑り速度VSiは,
操作対象上の接触点移動速度と指先上の接触点移動速度の差であり, 本論文では, 次のよう に定義する.
Vs、主Roと。、-Rfièfi (5.4)
5.2.3 摩擦と滑り
指先と操作対象との聞に滑りを起こさず, 転がり接触を維持しているとき, 操作対象の接 触点で、の力は摩擦円錐内に含まれる(Fig.5.3). 操作対象の接触点での力に関し, 接触面に
5.2. 滑り検出方式
• Current position of contact point o Previous position of contact point
(a) Contact with rolling only (b) Contact with rolling and slip
Fig.5.2: Contact displacement
56
垂直な方向の成分を法線力fni' 接触面に正射影したものを接線カfti' 指と操作対象の間の 最大静止摩擦係数を仰とすれば, 次式が成り立つ.
11
ft;11
_11
fn;11、μ1
(5.5)滑り始めるとき, 接触点での力は摩擦円錐表面上に存在し, 次式が成り立つ.
11 ft;
11
日コ=μz
(5.6)操作対象の表面の粗さが一様であり かっ指先の表面の粗さが一様であるとき, 接触面上 での滑りの方向と接線力の方向は同じになるCFig.5.4(a))[64]. このとき, 次式が成り立つ.
t)Si . ft; .,
11 V Si
11 11
f t; 11 - (5.7)滑りを表現する座標系として, 接触点を原点とし, 接触法線(操作対象の外仮,IJに向かう方 向が正)をz軸とする座標系�SC を設定するCFig.5.4(b)). この座標系のy軸の方向は,
操作対象座標系の1つの軸を接触面に正射影した方向とする. また, �Sc のx軸とy軸から なる2次元座標系を滑り座標系�S とする.
滑り座標系�Siで表現した滑り速度をVSSiとすれば, 滑り量Siは, この滑り速度り叫を積 分して求めることができる.
5.2 滑り検出方式 57
Contact Surface
nH ,+EE
Friction cone
Fig.5.3: Tangential and normal force at contact
pu ρv
d''hhU
4ECO
Finger i Contact Su rface
Fi ngeri
(a) Slip velocity and tangential
force (b) Slip coordinate frame
Fig.5.4: Slip at contact point
5.2. 滑り検出方式 5
5.2.4 滑り検出の実装
式(5.4)で計算された滑り速度がOでなく, 計測された力が式(5.6)と式(5.7)を満た しているとき, 滑りが生じていると判断すればよい.実システムにおいては, モデル誤差や 計測誤足を考慮し, 式(5.4), 式(5.6), 式(5.7)を以ドのように修正して, 滑りの検出,
及び滑り量の計算を行う.
センサ信号の振動の影響を軽減するため, 式 (5.4)におけると01' とflの計算には, 現在 の接触}�位伎のイ111Ci(t)と 人T秒|下jにおける技削�/.�位i?-tのイ111Ci(tーんT)を) fJしEる.イIlし, l'は 折の;Ijl]佐IJL'fJWJ, よ はJ宋イ/ドの速度に),いじてiJとめる11�[で、ある. このとき, 式(G.4)は次のように なる.
仏1(t) = Rο(t)((C川(t) -Co I ( t -h' T) ) /げ)
-R J, (1) (( C J, (t,) -C // (t -h'ï ')) / h'T) (G.8)
指先と操作付象物体If\jのl'之大11浄化!官僚係数l'iは, 操作IJíîに概m作の仰を批定することはで きるが[41. GG. GG. G7], .j山íUJのjくささや肥川形態によってその11fIは変化する.また, 指先が i'�'っているときは, }空機)Jは動防隊係数に依イがするが, この動摩擦係数は故大11'fl- JI二!空J弘行系数 よりも小さい. そこで, 推定した11iの以小イ1([よりさらに小さし叶Irt L3iをJIJしIて, 式(G.G)を 次のように修正す一る.
(条1'1:I)
|1 fl1 (t) 1
l
>凡11 fn,(t) 11 ー 「ι (5.9)
また, 式(5.7)で表現される)Jのノfrh]と滑りの)j向の制約は,Jfi走を考b!lして修正する.
但し, )Jの)f向と滑りのノjrf1Jとの誤足許作角度をBiとすると, ri ωSBiである.
(条件II)
1) 51 ( t) . f t i ( t) > ぺ
11り的(t)11 11 fi1 (t) 11 - 1/ 、 (5.10)
式(5.8)によってノイズの影響を軽減できるが, モデル誤差の影響は避けられず, 転が り接触が維持されている場合でも, 式のもむはOにならない. そこで, 条件1(式(5.9))と条 件II(式(5.10))を同時に満たす11手, 滑りであると判定する.
時刻toから時刻t までの, ì骨り座標系Es,から見たi骨り量Si(t)は, 次式で、求める.
5.3. 滑り検出実験 59
S川=
1:州vssi(u)du
(5.11)但し, VSSi(t)は滑り座標系I;Siから見た滑り速度であり, gi (t)は, 時刻t において滑り を検出したときには1, それ以外はOをとる2値関数である.
5.3
滑り検出実験
本節では, 滑り検出と計測の手法を検証するために行った実験について述べる.
5.3.1 実験1 :滑りが生じにくい操作の場合
転がりによる物体操作において, 対象に印加される外力が既知の場合, この外力を制御 ノレープ内で、補償することにより, 安定な把握と操作が実現できる. この場合, 転がり接触が 維持され滑りが少ない状態で物体操作が実現される. ここで, このような物体操作において 滑り検出を行ったとき, 本手法での滑り検出手法では, 滑りが検出されないことを示す.
操作対象として, 直径40[mm], 高さ125[mrn], 重量100[g]のベークライト円柱を用いた.
視覚による追跡が可能なように, 円柱表面にはマーカが貼りつけら れている. また, 滑りの観 測や計測誤差の測定が容易になるように, 鉛直上方への持ち上げ操作を行わせた(Fig.5.5). ここで, 重力以外の外力は対象に作用しておらず, 重力は既知であり, 十分な内力をかける ことにより補償可能であるとする.
Desir
Fig.5.5: Experiment 1: With a known external force to be compensated
この実験においては, 滑りは微小で、目視で確認することはできなかった. このときの滑り
信号をFig.5.6�こ示す. 式(5.8)(5.9) (5.10)の各ノξラメータの値はß= 0.45, γ= 0.45,
k = 2 0, T = 0.013である.Fig.5.6は, 上から, サーボサイクルで計測された滑り速度VSSi のx軸成分, 同y軸成分, 条件I, 条件II, 条件IとIIの論理積である. 図中, 太い実線は
ハU円hu
滑り検{H実験
5.3
また滑り計測座標系2:81のy事I!はIJ]れの軌をJ妾触而にlE 条件Iと条件IIの し きい怖を衣す.
射影した方向としている.
条件IとIIの論理積が1のとき, (廿りが11::,じたと判定されるがFig.5.6においては, 滑り この1;;.(1は指1本分のデータであるが, 他の折に関しても滑りが 日視で、の観測IJ結決と-]2文している.
また は検1'1',されていない.
検wされておらず,
「l寸loll叶lll」l」
2
「
一 」
2Finger2
nu nu nu nu nu ハU 4,
広d
ー 斗
0
×
kA
OZ何」ωO」OUL
[ω\EE]と一00一ω〉丘一一ω
nu
41 ハU
ωC 50 0
2 1.5
0.5
Ô 1
Q_ぢ (j) 2 0
てコ。 1.5 2
time (s)
0.5
。
Fig.5.6: Slip clけやction in ExpcfÌlllcnt 1
このi廿り;Ifを
?ilりが検,'1',されたときのi↑}り述皮を応分しi骨りbfを求める.
本下法では,
,� "iJllJされたj什り泣はゼロになっ この'J:D検では, 滑りが検H',されなかったため,
Fig.5.7にぷす.
ている. 比l絞のため, 滑りのイîJ!\f;に関わらず, 滑り速度を積分したときのi↑?り;£をFig.5.8に Fig.5.8ではゼロになっていないことカ巧〉カ、る.
ぷす.
5.3. i甘り検川実験
。
。
ε |
� J
E I
Slip displacement(with slip detection) of Finger2
0.5 1.5 2
0.5 1.5 2
time (s)
Fiι5.7: Slip clispla(,(,lll(,llt in Expc、rÌlllC'nt 1
Integral of slip velocity(without slip detection) of Finger2
ε o卜一一一一---
。 0.5 1.5 2
time (s)
Fig.5.8: Intcgral of slip vclocity in Experinlcnt 1
61
5.3 滑り検出実験 62
5.3.2 実験2 :滑りが、生じやすい操作の場合
次に, 重ノJ以外の未知外力を, 対象の運動を妨げる)jl旬へ作用させ, I付ノJを小さくし, {骨 りをl投怠に起こし, そのときの滑り検wを行った. Fig.5.9のように鉛直l二)jへの持ちとげ操 作において, 未知l外)Jを鉛1IそF)jf旬にイIj-:J日させた.
Desired
m山nD
external force
Fig.5.9: Expαilncnt 2: \Vit 11 èìll ll11kllO\\'ll ('xtcl'llHl [01'(可、代巴ainst礼clcsil'rd lllOtioll
この3釘釘鉛((介唱ìl川;川|
た. このときのj竹りイliUをFig.5.10に/Jミす. 1ヌ1'1', ii'tりが検,1'"されているのが分かる.
Finger2
ifj l(十一÷-1ー→
ト::い よム44
3。;1 5J/Jい\JL八/つ
� 01一ーバノ I
11l ハ( -'I/�I rへ I r ì.., �r Iド 1-\r---- I I ' ) IIlfI
3JW�
,� '\r 0ý U
,�
,\1
,\Il
Fig.5.10: Slip detcc叱ion in Exprrilnent 2
5.3. 滑り千食,'H'芙!検 63
本手法で、求めた滑り52をFig.5.11に示す. 滑りのイf無に関わらず, (甘-り速度を積分した ときの滑り量をFig.5.12に/示す.
Integral of slip velocity(without slip detection) of Finger2
ε 0ε 卜一一一一← イ
| 一一一一一---
仁Ill--トIll--E O「トIlllドIll--ヒ O
ハU ハu nU ハU ハU ハU
{EE}× 一{EE]弘 一
Fー..,
E ε 0卜10卜I....__,
>< -10ヒ。
Slip displacement(with slip detection) of Finger2
0.5 time (s)
2.5 3
Fig.5.11: Slip disphH'('lll('nl in ExpcrillH'1l1 2
3
。 0.5 2.5 3
time (s)
Fig.5.12: Intcgral of slip vclocity in Expcrin1cnt 2
5.4. まとめ 64
5.3.3 誤差評価
提案した手法で求めた滑り量と, 単なるj骨り速度の積分値の比較を行った. 持ち上げの際 の鉛直方向における, 滑り計測の誤差についてまとめたものをTable.5.1に示す. 実視l]1lq:は,
3次元測定器で測定した指先と対象の位置を基に, 幾何学的に求めた.
提案した手法で求めたj骨り量の誤差は2.0
[
l1l111]
以内に収まっている.Tablc.5.1: Comparison of crror in slip lneasuremcnt
Slip displacc、nlC'lÜ, Intcgl乱1 of ( p問)osccl llwt hocl
)[ nll 叶 slip vclocity [1111叶
Expl fingcl"
2 1.5 3.3自11gcr
3 0.2 l.7Exp2 五ngぞ1"
2 oリ 4.0自ngcr
3 l.0 0.55.4
まとめ
多|美j節多t�ロボットハンドによる物体操作'11の?',1"りの検出および滑りはの計測手法につい て述べた. ビデオレートステレオ悦党システムと多関節指の関節エンコーダおよび折先の力 モーメントセンサを併mし 作られる感覚情報を統合することにより, ノイズの多し叶三号か ら滑りを検出し計測できた. これらのセンサはいずれも特殊な試作品でなく入手容易であり,
耐久性も高し 実際の物体操作と微小なi骨りの検111,とを両立している.
汎用の操作システムの構築という観点から, i刻午'�I_:'の対象物体全体を転倒できる広視野 の視覚システムを用い, 対象の 一部のみを拡大して観測し分解能と精度を稼ぐという手法は とらなかった. 滑りの防止あるいは滑り検出のみをI�的としたシステムではないからである.
結果として, 汎用の操作性を損なうことなく滑りの検出と計測が実現できた.
本章では, 鉛直刺lに沿った物体操作における, 滑り倹出の実験結果を示した. さまざまな 接触状態変化や位置姿勢変化が起こるような複雑な作業での滑り検出に関しては, 6.3.3節で 述べる. 滑りの検出と計測結果をどの ように利用するかは達成すべき作業により異なる. 滑 り検出と計浪IJの効果については, 6.4節で述べる.
置望 七
第6章 組立作業における作業エラー検出
6.1 はじめに
本論文で提案するセンシングシステムでは, 3次元実時問視覚処理(第3章)とセンサ統 合(第4章)により, 対象の位置姿勢を精度よく安定に実時間計測できた. また, センサ統合 により滑りの検出と計測を実現した(第5章). 但し, これだけでは種々の誤差要因の存在す る環境で組立作業のような複雑な作業をロバストに達成することはできない.
一般に組立作業では, 操作対象と環境との接触を実現し, その接触を維持したまま新た な接触状態を作り出すことを繰り返して目標状態を達成する. このとき, 目標状態達成判定 の容易さやプログラミングの容易さなどの観点、から, 組立作業の動作プリミティブを用意し,
その組み合わせで作業記述する手法が考えられる. 松岡ら[63]は, 多関節多指ハンドでの転 がり接触を用いて組立作業を実行するための動作プリミティブを開発している. 本章の実験
では, この動作プリミティブを利用して組立作業を実行する.
組立作業で操作対象と環境との接触を維持したまま新たな接触状態を作り出す場合, 接触 に伴う複雑な相互作用が生じる. 特に摩擦力は動的に変化するため, 把握内力の設定や目標 達成の判定を適切かつ確実に 行うのは容易でない. 壊れやすい物体の操作や環境への影響を 考慮して, 把握内力や環境への押しつけ力を小さくすると, 指先での滑りも生じやすくなる.
滑りが発生すると操作が不安定になり, 目標達成の判定にも失敗することが多くなる. この とき, 作業目的から外れた操作が実行されるとしづ作業エラーの問題が生じる.
この問題に 関しては, 作業状態の観測結果を基に作業評価を行い, 作業エラーを検出する 手法 [63] が提案されている. この手法では, 更に, 作業エラーの検出結果に基づき, リカバ リ動作を実行しロバストな物体操作を実現している. 但し, 観測においては滑りを直接検出 せず, 滑りが生じた後に現れるエラー状態を検出しているため, 作業エラー検出前に物体操 作が破綻する危険性がある. これに対し, 本研究では, 滑りを作業エラーとみなし, 作業エ
ラーの検出とリカバリを行うことにより, 物体操作の破綻を未然に防ぐ.
本章では, まず, Peg-in-Hole作業での動作プリミティブについて説明する. 次に, この 作業での対象の位置姿勢計測と, その計測に基づく作業エラーの検出について述べる. 更に,
この作業において, 本センシングシステムにより, どのように滑りが検出されるかを示すと ともに, 同様な運動軌跡でも環境との接触のない操作では滑りが生じず, 検出もされないこ
6.2 動作プリミティブ 66
とを確認する. 最後に, 滑り計測に基づく作業エラー検出と, その結果を利用した制御実験 について述べる.
6.2
動作プリミティブ
Peg-in-Hole作業における作業目標の達成を確実にするため, 環境と 操作対象との接触状 態の遷移に対応した3つのプリミティブ操作("VcrticalMove-to-touch", Horizontal Move
to-touchヘ ηRotate-to-insert")を定義し [63], これを順次実行する(Fig.6.1ぅFig.6.2).
(1)
Vertical (2) Horizontal(3)
Rotate-to- Move-to- Move-to- insert touchι...:
touchlnitialー+ 一一一"
Fig.6.1: Peg-in-hole task (操作1) "Vertical Move-to-touch'
-. Goal
PegがHoleの上空で斜めに把持された状態から, Holeの縁に接触するまで 垂直方向に並進するように制御される. 接触判定は, Pegに加わる垂直方向の外 力の変化の大きさをしきい値処理することにより行われる.
(操作2) " Horizontal Move-to-touch"
Pegは, 垂直方向に一定の力で押し付けを行い, かっ, 水平方向に Holeの縁 と接触するまで並進するように, ハイブリッド制御される. 接触判定は, Pegに 加わる外モーメントの変化の大きさをしきい値処理することにより行われる.
(操作3) "Rotate-to-insert"
Pegは, 回転および軸方向に並進するように制御されてHoleに挿入される.
目標状態達成の判定は, 垂直方向についてPegに加わる外力の変化をしきい値 処理することと, 垂直方向のPegの移動量が一定値に達することの論理和によっ て行われる.
6.2. 動作プリミティブ
(a) Initial Stat
(c) HorÎzontal Move-to-touch (d) Rotateーもo-Însert State)
Fig.6.2: Moもion prÍlnitive
67
(Goal
Fょ一一一一一一一 - 1=-
6.3. 作業エラ一時の計測 6
物体配,I'iや対象操作の位i汽出足を考慮して, 11傑状態達成の判定に, )Jまたはモーメント の変化のしきい値処理をJl-jいている. プリミティブの導入により動作の怠|床が明確になって いるので, 判定が簡単化できている.
6.3
作業エラー時の計測
本節では, まず, [6��]で従奈された作業エラー検出下法について述べる. 次に, 本センシ ングシステムにおいて, 対象の傾きl汁測によりイ乍業エラーカ対会山できることを/示す. さらに,
作業エラーII.�:に作.じるd'fりが倹IIJ,/,ni1!lJできていることをぷす.
6.3.1 傾き計測による作業エラー検出
作動作プリミテイブの'ぷ行'1', 政削!;主!ぷ'j:IJどにおける不適切なしさいイI�[設定や, 刈象と広:
境との子WJせぬ!世保やHiJ交:などにより 1: 1 t�f{状態述!ぷの判定に失敗し, 作業の11(1りから外れ た物体操作が行われることがある. このとき, ハンドの印刷lルーフでは, 特定の:IJlj佐11 �止のみ をiûli!!lJし, 日十:�l� 11f{とのlif:ぷが小さくなるように;IJIjft=llしているため, 観測;ItにJ見れない作業エ ラーの発生を検nJ,することができない. そのがi以, 対象を決ドさせたりして, 作業は依綻す る. 例えば, 操作2 (" IIorizollt a1 1\10"(\-t 0-1 ou('h吋)の実行において, 1 [限状態判定のしきい イIflがlfJiくl没之されている場介を考える. この以iイT, 操作されたPC、広がプ〈の紋に抜削!し日係;1)\
態に到達しても, P仁志に川|わる外モーメントの変化がしきい似に到達せず, プリミテイブは 停止しない. もしそのまま操作が続行されれば, 指先とPcgの接触点がJ行光、I�-J;R [二を外れて しまい, また, ある関節がその"J動範[JÞIの限界に達し, 作業は破綻する(Fig.6.3) . このプ リミテイブ操作での作業エラーを検11',するためには, プリミティブIJfJ�fì Il.fから刈-象物体の姿 勢を|草似し, 初別配間から位t�しうる姿勢変化のIIJ[,�を必えたかどうかを調べればよい[63].
6.3.2 傾き計測による作業エラー検出実験
ここでは傑作2において, PC、gに)]11わる外モーメントの変化が11原状態判定のしきい伯 (- O.06[NmJ)に到達しない場介を考える. このときの外モーメントのグラフをFig.6.4にぷ す. この場介, fl原状態に達した後も操作が続行され, Fig.6.5のようにPcgの軸が大きく傾 く. エラー検出モジュールでは, Pcgの仙の傾き変化を操作開始時から観iWJし, しきい他処 理することによりエラー判定を行う. このエラー検出実験でのしきい備は, 環境との摩擦な どによる傾きの変動や, センサによる傾き計浪IJ誤差を考慮して, O.14[rad]とした. 対象のエ
ラーが検1'1\されるとハンドシステムはプリミテイブを停止する.
司帽�
6.3. 作業エラー時の計測
(2)Horizontal Move-to
touch
(2E)Horizontal Move-to
touch Error
69
tIme
Fig.6.3: Horizontal Move-to-touch with failure in judgement of contact achievement and without error detection
言0.08 ζ0.06 2三0.04
E 0.02
Q
0
こ-0.02
�-0.04 2 -0.06r
活 ー 0 吋
external moment
time (s)
Fig.6.4: External moment with inadequate threshold
lean ofaxis
0.2
3 0 15一一一一一
妥何 0.1
ち0.05
吋 GにJ
-0.0も 0.5
time (s)1 1.5
Fig.6.5: Observation of object axi
2
咽�
6.3 作業エラーH、?の計測 70
エラー検H\ �こより停止した場令をFig.6.6(a)に示す. 比較のため, f-i標状態判定がJEし く実行され停止した場合をFig.6.6(b)に示す. このように, 本センシングシステムでの傾き 計測により, 作業エラー検iJ',が'た現でき, 作業のfVJL綻を未然に|功ぐことができる.
(FI) StOppélgC by ('JTOl dctcctioll aftゃr [(.ìil \11'(、
ill jllclgC'J1lC'llt of C'OlltClct achi\'C'l1lC'ut
(b) Stoppag(' byωl'l'cct .iUdgC'lllC'llt ()f cOlltact
(lchiVCl1lCllt
i巳.G.O: Horizont礼1 1\10\,('- to- tOllch
F 一一一一一一一一一ー一 ��
6.3. 作業エラー時の計測 71
6.3.3 滑り検出実験
第5章では, 1つの軸に沿った物体操作における, 滑り検出の実験結果を示した. 本節で は, さまざまな接触状態変化や位置姿勢変化が起こるPeg-in-Hole作業においても, 滑りの検 出が可能であることを確認する. さらに, 同様な運動軌跡でも環境との接触のない操作では 滑りが生じず, 検出もされないことを確認する.
<< Peg-in-Hole作業における滑り検出》
Peg-in-Hole作業で作業エラーが起こった時, 環境と接触したまま目標とは異なる動作を とるため, 指と対象との聞の滑りが生じやすい. ここでは, この滑りを検出し計測する.
操作対象のPegとして, 直径40[mm], 高さ125[mm], 重量100[g] のベークライト円柱を 用い, はめ合い実験を行った. Holeのクリアランスは, O.8[lnm] である. Pegを把握したと きの3本の指先の初期配置, 操作過程の状態遷移の様子をFig.6.7に示す.
操作1 は目標状態で停止した. 操作2では, Pegの底部とHoleの上縁との接触を維持し つつ, Pegを水平に滑らせて新たな接触状態の達成を試みたが, 接触判定のしきい値が大き すぎたため, 接触した後も動作が続いた. 物体や環境に過度な力を与えないよう把持内力を 小さくしていたため, 指先が滑り, Pegが大きく傾いたが, 視覚による傾き計測により停止 した( 操作2E) . 操作3Eでは, PcgがHoleにひっかかりながら操作が行われたため, Peg の挿入には成功したが指先では滑りが生じた.
.2:八 引 (1)Vertical
V「もJ Move-to-
句 touch
finl
lnitial ー+
(2)Horizontal Move-to
touch
一一炉
(2E)Horizontal Move-to
touch Error
一一ー ー一一"
Fig.6.7: Peg-in-hole task with error
(3E)Rotate-to
insert Error
Goal
この実験においては, 操作2Eと3Eにおいて滑りが発生し目視でも確認できている. 干
のときの指3(Fig.6.7中の五n3)の滑り検出の結果をFig.6.8とFig.6.9に示す. 図中の一 点鎖線の縦線で区分けされた部分が各操作プリミティブの実行に対応する. 滑り判定と計測
6.3. 作業エラーH与の計測 72
にあたって, 式(5.8)(5.9) (5.10)の各パラメータの偵はß = 0.45, γ= 0.45, 人 �3, T = 0.013 である. また 滑り計iHlJ I�if標系l:s・?のy仙は円ねの判lを接触|可にlE身ナ影したHlú]と
している.
finger3
3、 1011 I Ir.., � 111 I l. 1. 1. I 1, ^ dl I � d � ^ AU n � I! dlll �I.. I-J
E >< 0 �'ll'"汁1ヘ川�I ìIWlfI\JIIIVVln!1 ^ M.II.lllm�^^ NlJ同rI�INII\I� 刷、�IJI�II��lIluJ川川川旧
三 一10卜 i IP ' '1と |ド11 yl r�Vv "'nr'viiwnr' ri' , r'rJW1���IIIV�I'�
h 田 園 ..- • -•. .. ・ ・ ・ ・ ・ ・ 2・ ・ …・ ・
:5 0 1 2 3 4 5 6 7 8 9 10
_Q 。 ... > �、010
g-(f) -10
Q 1�
... co
.._
。仁20.5
.9 .._ 0
� 0
Q)
'(j) c 0
0 u
C
0...ぢO
百2 0
ω
O 2 3
6
4 5 6
7 8
7 8
百 o 1 2 3 4 5 6 7 8
a(1) _J2L_ ( 2E) __ time(s) (3E)
10
9 10
9 10
9 10
Fig.G.8: Slip 心tC'ctiOll in pC'g-in-l刈o task(五時01' 3)
Fig.6.8はJ-_から, サ一ボボ、サイクルでで、IÎ刊1机視測リ-凶 されたi十計,↑↑i「g?}りi速宝!皮支U内-川‘
条l'件T午|二1 U法l去:級jμJとJ後長線ノ刈Jのよ比ヒり) , 条件II(肢が��)jと滑り速度のなすf(Jの余以), 条件IとIIの
論理積である. 1ヌ1'11 太い実線は 条件Iと条íl IIの し きい伯を点す. 転がり接触による制御 則巾で必�な指先接触l�佐川のI�I-tj�に, 悦党で,�'hWJされた操作対象の似円安勢を1IJし3ており,
これが誤jfiをJ、?つため i竹り速!文は大きなノイズを合んでいる.
Fig.6.9 は[-_から, 条1'1二IとIIが成立するときの 滑り速度だけを応分 して得られたi"tり 守のx[1�jlJ戊分, y '14lJ成分, 条件IとIIには無関係に十丹り速度を杭分 したもののxl削l成分とY
$UI成分である. 111し, 各操イ乍プリミテイブの切り伴え1I!j,行、で積分:立をゼロとしている.
指3では, 操作2Eで操作対象I��f票系の� II�" (i骨り略標系のy1141]と、I!:行)のマイナス)jlíl]
への指先滑りが観測され, 操作3Eで操作対象眼標系のy紬(滑り!宅標系のx軸とほぼ予行) のマイナスノ7向への指先滑りが観測された. 操作1と操作2における指先滑りは微小で, 11
視では確認できなかった. Fig.6.9の結果から, 条件IとIIが成立するときの滑り泣の計iJ1iJ
. 一一一 一 一 - J=-
6.3. 作業エラーH、?の計測
73
slip displacement(with slip detection) of Finger3
l
‘ - E
l ••
....
-月i dF、�ザ】F-白、一、,一ー一ー-』心---..._-....
。 2 3 4 5 6 7 8 9 10
...---. 5
ε ε 。
〉、 -5
. -...、、.l
。 2 3 4 5 6 7 8 9 10
time (s)
integral of slip velocity(without slip detection) of Finger3
{EE}×
0 1 2
4 (1) ..._j2L�
3
(2E)
4
time (s)
7
(3E)
8 9 10
.... ‘ ー-
Fig.6.9: Slip diSplé1代1110凶in prg-in-l叫c task