好燃費-低公害エンジンのための適応空燃比制御
安 井 裕 司*・川 澄 郁 絵*・東 谷 幸 祐*
The Adaptive Air-Fuel Ratio Control
for High-Efficiency and Low-Emission Engines
Yuji Yasui
*・
Ikue Kawasumi* and
Kousuke Higashitani*
Abstract: The mainstream of low emission technologies for gasoline engines is an accurate air-fuel ratio control to maximize emission conversion rate of three-way catalyst. An engine equipped with a continuously variable lift and phase mechanism is focused on as a method to improve fuel consumption. However, the engine indicates large variation and aging effect of in-cylinder gas amount, and the accuracy of air-fuel ratio of the engine is lower than conventional gasoline engines. Conventional feedback algorithms could not provide sufficient control performance of air-fuel ratio of the engine. Therefore, the control system composed of adaptive feedforward and feedback algorithms is newly designed and applied to the engine.
Keywords: adaptive control, air-fuel ratio control, gasoline engine, low emission & fuel economy 1. はじめに 米国カリフォルニア州の LEV 規制に代表されるように, 1990 年代より世界各国において自動車の排ガスに対する規 制強化が行われた.この強化された排ガス規制に適合するた め,微粒化燃料インジェクタや可変動弁機構などのさまざま なハードウェア技術が開発された1),2). これらと同時にソフトウェア技術,すなわち,制御技術の 研究や開発も精力的に行われた.これらの代表的な例は,エ ンジンの燃焼ガスの空燃比を制御する空燃比制御 1)-4)であっ た.これは,空燃比をその目標値に高精度に制御することに よって触媒の浄化率を最大限に活用し,触媒下流のエミッシ ョンの低減を図るものである. ところが,車両に搭載されるエンジンは,それが使用され る環境条件の幅が広く,大量生産されることから,その特性 の変化幅が大きく,固体ばらつきを有する.また,数十万キ ロ以上の走行による経年変化も生じる.このため,現代制御 やロバスト制御,適応制御などの高度な制御アルゴリズムの 空燃比制御への適用が数多く研究され5),6),一部量産されてき ている. 一方,地球温暖化の抑制のため,自動車から排出されるCO2 量の低減が求められるようになり,自動車の燃費規制が世界 各国で課せられるようになった. このため,ガソリンエンジンでは連続可変式バルブタイミ ング-リフト機構 7),8) を備えるもの(以下,連続可変リフトエ ンジン)が開発され,一部実用化されてきた.このエンジンは, 吸気バルブリフトのリフト量と位相によりシリンダ内吸気量 が急激に変化するため,従来のようなエアーフローセンサや 単純なマップを用いた燃料噴射量制御では,過渡時の空燃比 の制御性能が従来エンジンに比べて低下するという課題があ った. そこで,本研究では,連続可変リフトエンジンのシリンダ 内吸気量の固体ばらつきや経年変化を補償する適応機能を加 えたフィードフォワード制御と適応制御を用いたフィード
バック制御を組み合わせた新たな適応空燃比制御系を
構築し,連続可変リフトエンジンへ適用することにより過渡 時の空燃比制御性能を向上した. 以下に連続可変リフトエンジンについての概要とその空燃 比制御に関する課題について述べ,その後,新たな適応空燃 比制御の制御アルゴリズムとそのテスト結果について述べる. 2. 連続可変リフトエンジンの概要 ガソリンエンジンの動弁機構を可変する機構としては,以 下の3つの方式がある. ・連続可変位相機構 (Fig.1 の(a)) ・切換式バルブタイミング-リフト機構 ((b)) ・連続可変式バルブタイミング-リフト機構 ((c)) *(株)本田技術研究所 埼玉県和光市中央 1 丁目 4 番 1 号 *Honda R&D Co., Ltd.0 + Lift (mm) Exhaust valve Intake valve Lift (mm) Lift (mm) TDC TDC BDC TDC
(Top Dead Center)
BDC (Bottom Dead Center)
BDC (a) Variable valve timing control
(b) Switchable valve timing and lift control
(c) Continuous variable valve timing and lift control
TDC BDC
(Bottom Dead Center)
0 + 0 + 0 + Lift (mm) Exhaust valve Intake valve Lift (mm) Lift (mm) TDC TDC BDC TDC
(Top Dead Center)
BDC (Bottom Dead Center)
BDC (a) Variable valve timing control
(b) Switchable valve timing and lift control
(c) Continuous variable valve timing and lift control
TDC BDC
(Bottom Dead Center)
0 +
0 +
レシプロ型のガソリンエンジンでは,ピストンが最も高い
位置となるタイミングを上死点(Fig.1 中の TDC:Top Dead
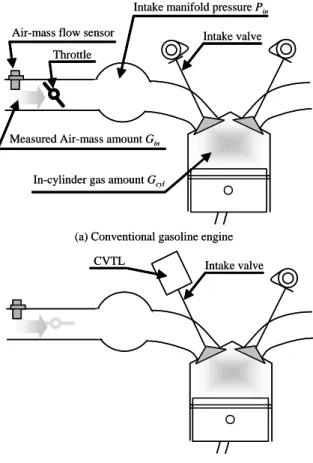
Center),最も低い位置となるタイミングを下死点(図中の BDC : Bottom Dead Center)と呼ぶ.このとき,連続可変位 相機構は,吸気バルブのリフト量と開角を保持したまま吸気 バルブの開きタイミングを上死点に対して連続的に変更する ものであり,切換式バルブタイミング-リフト機構は,異なる リフト量と開角を持つ複数のカムをエンジンの運転条件に応 じて切り換えることによって吸気バルブのリフト状態を変更 するものである.連続可変式バルブタイミング-リフト機構(以 下,CVTL : Continuous variable Valve Timing and Lift mechanism)は,Fig.1 に示すように,吸気バルブのリフト量 と開角,開きタイミングを連続的に可変できる機構であり, CVTL は, 前の二つの機構に比べて,ポンピングロスの低減 効果が大きく,燃費向上効果も高い.また,これはエンジン 回転数に応じてバルブリフト量と開角,開きタイミングを適 切に設定できるため,可変動弁機構を備えない従来のエンジ ンに比べて最大トルクも向上することができる. 3. 連続可変リフトエンジンの課題 Fig.2 (a)に示した一般的ガソリンエンジンでは,吸気管に 取り付けられたスロットルを調整することによって吸入管内 負圧Pinを増減し,シリンダへの吸気量Gcylを調整する.こ のとき,燃料噴射量Gfuelは,吸気管の上流に取り付けられた エアフローセンサによって観測される吸気量 Gin,または, Pinに基づいて算出される. 一方,Fig.2 (b)に示した CVTL を備えた連続可変リフトエ ンジンでは,吸気バルブのリフト量や開角によってGcylを直 接調整できるため,Gcylを調整するためにPinを負圧化する必 要はない.このため,Pinに基づいたマップにより燃料噴射量 を決定できなくなる.よって,吸気管にエアフローセンサを 設置し,それにより観測されたGinに基づいてGfuelを算出す る手法の適用が考えられる. しかしながら,連続可変リフトエンジンでは,Pinの負圧化 を最小限に抑えることによりポピングロスの低減を行ってい るため,スロットル開度を最大に近い状態とする.このため, 吸気管内脈動が大きくなり,エアフローセンサの観測精度が 低下するという課題が発生する. さらに,一般的なガソリンエンジンでは,エアフローセン サの近傍に設置されたスロットルによりGcylが調整されるた め,スロットル開度の変化によって生じた Gcylの変化が Gin として観測されるまでのむだ時間が極めて小さい.一方,連 続可変リフトエンジンでは,エアフローセンサから離れた場 所に位置する吸気バルブにて Gcylが調整されるため,Gcylと Ginの間のむだ時間が大きくなる.よって,Ginに基づきGfuel を決定すると,急な過渡状態においてGfuelの増減タイミング にずれが生じ,空燃比の制御性が低下する. これらのことから,Fig.3 に示すように,燃料噴射量の基準 値Gfmapをリフト量Lin,カム位相Cin,エンジン回転数Neに 対して設定されたマップGcyl_mapを用いて算出し,Fig.4 に示 すように燃焼ガスの空燃比を検出できるリニア空燃比センサ
Fig. 4 Relationship between air-fuel ratio of
combustion gas and the output of
wide-range λ sensor
0 1 + 14.5 Lean Rich Air-fuel ratio of combustion gasOutput of w id e-ran ge λ sens or φιn
Fig. 4 Relationship between air-fuel ratio of
combustion gas and the output of
wide-range λ sensor
0 1 + 14.5 Lean Rich Air-fuel ratio of combustion gasOutput of w id e-ran ge λ sens or φιn Air-mass flow sensor
Throttle
Intake valve
Measured Air-mass amount Gin
In-cylinder gas amount Gcyl
Intake manifold pressure Pin
(a) Conventional gasoline engine
(b) A gasoline engine equipped with CVTL Intake valve CVTL
Fig. 2 Comparison of in-cylinder gas control
Air-mass flow sensor Throttle
Intake valve
Measured Air-mass amount Gin
In-cylinder gas amount Gcyl
Intake manifold pressure Pin
(a) Conventional gasoline engine
(b) A gasoline engine equipped with CVTL Intake valve CVTL
Fig. 2 Comparison of in-cylinder gas control
STC CVTL Engine Wide-range λ sensor Feedback coefficient Kf Catalyst Valve lift Lin Cam phase Cin Engine speed Ne Gcyl_map X Sensor output φin Fuel Injector Gmap Target value φop Kaf Gfmap
Injected fuel mass
Gfuel
Fig. 3 Air-fuel ratio control for the engine
equipped with CVTL
Feedback function Feedfoward function STC CVTL Engine Wide-range λ sensor Feedback coefficient Kf Catalyst Valve lift Lin Cam phase Cin Engine speed Ne Gcyl_map X Sensor output φin Fuel Injector Gmap Target value φop Kaf GfmapInjected fuel mass
Gfuel
Fig. 3 Air-fuel ratio control for the engine
equipped with CVTL
Feedback function Feedfoward function
(Fig.3 の Wide-range λ sensor)の出力
φ
inを用いて算出された 燃焼補正係数 Kfにより Gfmapを補正することによって Gfuel を決定することが考えられる. ここで,Fig.5 に各エンジン回転数におけるLinとGcylとの 関係を示す.図からわかるように連続可変リフトエンジンで は,エンジン回転数に応じてLinとGcylの関係が大きく変化 し,特に 2000rpm 以下の低エンジン回転数条件において, Linに対するGcylの傾きが急になることが特徴となっている. 一方,CVTL は一般的に複数のギヤやリンク機構からなる ことが多く,機構部品の固体ばらつきや磨耗などによる経年 変化により,Linのセンサによる検出値が実際のリフト量に対 して誤差ε
Lを生じることがある.このとき,Fig.6 は低エン ジン回転数におけるGcyl_mapの設定に用いた基準のLinに対す るGcyl特性(図中の実線)とそのLinに対してεLが発生したとき の特性(図中の破線)との比較であるが,前述のように低エンジ ン回転数ではLinの変化に対するGcylの傾きが急になってい るため,ε
Lによって生じる吸気量誤差ε
Gは大きなものとなる. また,ε
Lに対するε
Gの感度はLinが小さいときには大きく, Linが大きくなるにつれて小さくなる.このことから,過渡時 にLinが低リフトから高リフトに変化する際,ε
Lが存在する とε
Gが大きく変化することがわかる.よって.このε
Gによっ て生じるφ
inのその目標値
φ
opに対する偏差
ε
φの補償速度
を高める必要がある.よって,Fig.3 の制御系では,
Kf を算出するためのフィードバックアルゴリズムとしてセ ルフチューニングコントローラ(以下,STC: Self-Turning Controller)4),9)を採用した.
本研究に用いた連続可変リフトエンジンの Kfからφ
inまで の動特性は,システム同定試験の結果より,以下のような入 力に3 制御時刻のむだ時間を有する ARX モデル9)として表現 できることがわかった. このことから,PID 制御のような制御対象の出力を予測す る要素を持たないフィードバックアルゴリズムを適用した場 合,無駄時間に対する安定余裕の確保のためにフィードバッ クゲインを低く設定しなくてはならなくなる.つまり,ε
φの
補償速度を高めることができない.
よって,ここでは(1)式を再帰的に用いることにより,3 制 御時刻先の出力φ
in(k+3)を予測する式を以下のように導出し, このφ
in(k+3)がφ
opとなるようにKfを算出するSTC を以下の ように構成した.φ
in_hat(k)=θ
T(k-1)ζ(k-3)
(8)
e
id(k) = φ
in-
φ
in_hat(k)
d
θ(k) = λ dθ(k-1) + P e
id(k)
θ(k) = θ
0+ dθ(k)
(4)
(5)
(7)
パラメータ調整則
Γ ζ(k-3)
1 + ζ
Τ(k-3)
Γ ζ(k-3)
P =
(6)
φ
in_hat(k)=θ
T(k-1)ζ(k-3)
(8)
e
id(k) = φ
in-
φ
in_hat(k)
d
θ(k) = λ dθ(k-1) + P e
id(k)
θ(k) = θ
0+ dθ(k)
(4)
(5)
(7)
パラメータ調整則
Γ ζ(k-3)
1 + ζ
Τ(k-3)
Γ ζ(k-3)
P =
(6)
K
f(k) = { φ
op(k) – r
3(k) K
f(k-3)
– r
2(k) K
f(k-2)– r
1(k) K
f(k-1)
– s
0(k) φ
in(k-3) }
コントローラ
b
0(k)
1
(3)
K
f(k) = { φ
op(k) – r
3(k) K
f(k-3)
– r
2(k) K
f(k-2)– r
1(k) K
f(k-1)
– s
0(k) φ
in(k-3) }
コントローラ
b
0(k)
1
(3)
(10)
θ
Τ(k)=[s
0(k) r
3(k) r
2(k) r
1(k) b
0(k)]
ζ
Τ(k)=[φ
in(k) K
f(k-3) K
f(k-2) K
f(k-1) K
f(k)]
θ
0Τ=[s
00r
03r
02r
01b
00]
(9)
(11)
(10)
θ
Τ(k)=[s
0(k) r
3(k) r
2(k) r
1(k) b
0(k)]
ζ
Τ(k)=[φ
in(k) K
f(k-3) K
f(k-2) K
f(k-1) K
f(k)]
θ
0Τ=[s
00r
03r
02r
01b
00]
(9)
(11)
φ
in(k) = a
1φ
in(k-1) + b
1K
f(k-3) + b
2K
f(k-4)
(1)
a
1,b
1,b
2:モデルパラメータ
k :制御時刻
φ
in(k) = a
1φ
in(k-1) + b
1K
f(k-3) + b
2K
f(k-4)
(1)
a
1,b
1,b
2:モデルパラメータ
k :制御時刻
s
0= a
13r
3= a
12b
2r
2= a
12b
1+ a
1b
2r
1= a
1b
1+ b
2b
0=b
1φ
in(k+3) = s
0φ
in(k) + r
3K
f(k-3) + r
2K
f(k-2)
(2)
+ r
1K
f(k-1) + b
0K
f(k)
s
0= a
13r
3= a
12b
2r
2= a
12b
1+ a
1b
2r
1= a
1b
1+ b
2b
0=b
1φ
in(k+3) = s
0φ
in(k) + r
3K
f(k-3) + r
2K
f(k-2)
(2)
+ r
1K
f(k-1) + b
0K
f(k)
Fig. 5 Relationship between valve lift and suction
air to a cylinder
Engine speed (rpm) 1000 2000 4000 6000 0 0.1 0.2 0.3 0.4 0.5 0.6 0 2 4 6 8 10 Valve lift Lin(mm)Suction air in a cyl
inder Gcyl (g ) ΔLin ΔGcyl Rcyl=ΔL in ΔGcyl Maximum +
Fig. 5 Relationship between valve lift and suction
air to a cylinder
Engine speed (rpm) 1000 2000 4000 6000 0 0.1 0.2 0.3 0.4 0.5 0.6 0 2 4 6 8 10 Valve lift Lin(mm)Suction air in a cyl
inder Gcyl (g ) ΔLin ΔGcyl Rcyl=ΔL in ΔGcyl Maximum + Engine speed (rpm) 1000 2000 4000 6000 0 0.1 0.2 0.3 0.4 0.5 0.6 0 2 4 6 8 10 Valve lift Lin(mm)
Suction air in a cyl
inder Gcyl (g ) ΔLin ΔGcyl Rcyl=ΔL in ΔGcyl Rcyl=ΔL in ΔGcyl Maximum +
Fig. 6 The Influence of suction air in a cylinder
caused by valve lift error
0 +
0 +
Valve lift Lin
Suction air in a cyl
inder
Gcyl
ε
LLin_l
ε
GFig. 6 The Influence of suction air in a cylinder
caused by valve lift error
0 +
0 +
Valve lift Lin
Suction air in a cyl
inder
Gcyl
ε
LLin_l
しかしながら,このSTC もフィードバックアルゴリズムで あるため,
ε
φが発生しないとその補償動作は発生せず,その 補償にも数制御サイクルを要する.Fig.7 は,仮想的にε
Lを 発生させ,FTP-75 モードを走行したときの STC によるφ
in の制御結果であるが,図より,アイドル運転から加速にいた る条件において,STC の補償動作の遅れによりε
φが大きくな ることがわかる. このことから,連続可変リフトエンジンの空燃比制御では 更なる制御性能の向上が必要となることがわかる. 4. 新たな空燃比制御アルゴリズム フィードバックアルゴリズムは偏差の抑制に対して遅れを 生じ,前述のようにKfからφ
inまでの空燃比制御系はむだ時 間を有するため,Fig.6 に示したε
Gによって生じるε
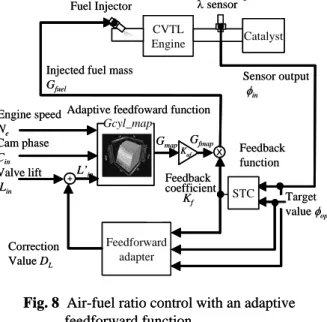
φをこれ以 上速く補償することは困難である. このことから,本研究ではフィードバックアルゴリズムの 速応性を高めるのではなく,Fig.8 に示すようにε
Lが直接影 響を与える Gfmapを算出するフィードフォワードアルゴリズ ムに適応機能(図中の Feedforward Adapter,以下,フィード フォワード適応器)を追加することにより,空燃比の制御性の 向上を図った. 図の制御アルゴリズムでは,Gcyl_mapの検索に用いるリフト 量をLinから以下の補正後リフト量Lin’とし,ε
Lの影響を補償 する. このとき,DLがフィードフォワード適応器にて算出される が,そのブロック図をFig.9 に示す. フィードフォワードアルゴリズムにおける Gcyl_mapは,ε
L がゼロのときφ
inがφ
opに一致するように設定されている.よ って,ε
LがDLによって適切に補償されたとき,φ
inはφ
opに一 致する.このことから,φ
inがφ
opに一致するようにDLを算出 すれば良い.しかしながら,この動作は,STC の制御目的と 同じになってしまうため,STC とフィードフォワード適応器 の干渉を回避しなくてはならない. そこで,STC によるフィードバックが動作していない場合 の仮想のリニア空燃比センサ出力として次式を定義する.L
’in(k) = L
in(k) + D
L(k)
(14)
D
L: リフト量補正量
L
’in(k) = L
in(k) + D
L(k)
(14)
D
L: リフト量補正量
φ
mod(k) = φ
in(k-1)/K
f(k-3) (15)
K
f:STCにて算出された燃料補正係数
φ
mod(k) = φ
in(k-1)/K
f(k-3) (15)
K
f:STCにて算出された燃料補正係数
λ =
λ1
λ2
λ3
λλ4
0
0
(12)
Γ =
Γ10
0
(13)
λ5
Γ2 Γ3 Γ4 Γ5θ
0:初期適応パラメータ
Γ
1~5:適応ゲイン
λ
1∼5:忘却係数 (0<
λ
1~5≦1)
λ =
λ1
λ2
λ3
λλ4
0
0
(12)
Γ =
Γ10
0
(13)
λ5
Γ2 Γ3 Γ4 Γ5λ =
λ1
λ2
λ3
λλ4
0
0
(12)
Γ =
Γ10
0
(13)
λ5
Γ2 Γ3 Γ4 Γ5θ
0:初期適応パラメータ
Γ
1~5:適応ゲイン
λ
1∼5:忘却係数 (0<
λ
1~5≦1)
Fig. 9 The block diagram of the feedfoward adapter
Feedback coefficient Kf Valve lift Lin Cam phase Cin Engine speed Ne SMC Weight RSM Sensor output φin Target value φop / + + φmod εmod X εrsm - Correction Value DL Wrsm
Fig. 9 The block diagram of the feedfoward adapter
Feedback coefficient Kf Valve lift Lin Cam phase Cin Engine speed Ne SMC Weight RSM Sensor output φin Target value φop / + + φmod εmod X εrsm - Correction Value DL Wrsm 0 0.5 1.0 1.5 600 650 700 750 800 850 900 950 1000 time (s) Measur ed Equivalence Ratio 0 50 100 Ve hicle sp ee d ( k m /h) φin φop Vehicle speed
Fig. 7 Time series data of
φ
incontrolled by STC
in FTP-75 mode
0 0.5 1.0 1.5 600 650 700 750 800 850 900 950 1000 time (s) Measur ed Equivalence Ratio 0 50 100 Ve hicle sp ee d ( k m /h) φin φop Vehicle speed 0 0.5 1.0 1.5 600 650 700 750 800 850 900 950 1000 time (s) Measur ed Equivalence Ratio 0 50 100 Ve hicle sp ee d ( k m /h) 0 0.5 1.0 1.5 600 650 700 750 800 850 900 950 1000 time (s) Measur ed Equivalence Ratio 0 50 100 Ve hicle sp ee d ( k m /h) φin φop Vehicle speed φin φop Vehicle speedFig. 7 Time series data of
φ
incontrolled by STC
in FTP-75 mode
Fig. 8 Air-fuel ratio control with an adaptive
feedforward function
CVTL Engine Wide-range λ sensor Feedback coefficient Kf Catalyst Valve lift Lin Cam phase Cin Engine speed Ne Gcyl_map X Sensor output φin Gmap Target value φop Kaf GfmapInjected fuel mass
Gfuel STC +L’in Feedforward adapter Correction Value DL
Adaptive feedfoward function
Feedback function Fuel Injector
Fig. 8 Air-fuel ratio control with an adaptive
feedforward function
CVTL Engine Wide-range λ sensor Feedback coefficient Kf Catalyst Valve lift Lin Cam phase Cin Engine speed Ne Gcyl_map X Sensor output φin Gmap Target value φop Kaf GfmapInjected fuel mass
Gfuel STC +L’in Feedforward adapter Correction Value DL
Adaptive feedfoward function
Feedback function Fuel Injector
(15)式では,(1)式における空燃比制御系の無駄時間を考慮 し,
φ
inとKfの間に3 制御時刻の時間差を設定している.さ らに,φ
modとφ
opの誤差ε
modを次式により求める. このとき,ε
modはε
Lの影響のみではなく,インジェクタの 流量特性の変化やばらつき,パージガスの導入など他の要因 によって生じる可能性がある.このため,他の要因によって 生じたε
modに基づいて DLを算出するとフィードフォワード アルゴリズムの Gcyl_mapを適切に補正できなくなることがあ る. そこで,適切なDLを算出するため,各NeにおいてLinと Cinを変化させたときの変化量を示す応答曲面Rcylを求める. このとき,RcylはFig.5 においてLinをΔLin変化させたときの Gcylの変化量をΔGcylとしたとき,下式を意味する.Rcylの最大値をRcyl_maxとしたとき,Rcyl_maxを用いてRcylを
正規化することにより重み応答曲面(Fig.9 のWeightRSM)を 算出し,これを用いて下式のように応答曲面重みWrsmを算出 する. さらに,このWrsmにより
ε
modを重み付けすることにより,ε
Lの影響が強調された誤差信号として重み付き誤差ε
rsmを次 式のように算出する. ここで,DLはε
rsmをゼロとするように算出すればよいので, つぎに示すスライディングモード制御アルゴリズム 2),6),10)に よりDLを算出する. 5. シミュレーション結果φ
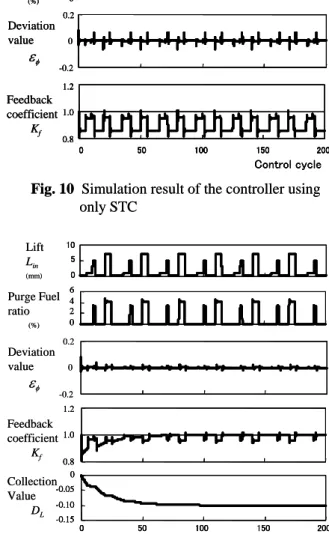
inの制御性に対するフィードフォワード適応器の効果を 確認するため,(1)式を仮想的な制御対象とし,エンジン負荷 を周期的に変化させたときのシミュレーションを行った.こ のとき,エンジン回転数条件を一定,ε
L=0.1mm,負荷の増 大ともにパージガス導入率を上昇させる条件とした. Fig.10 は,Fig.3 に示した STC のみを用いた手法の結果で ある.STC は無駄時間に対する補償機能を有することから, 高いゲインを維持しやすい.よって,STC はパージガスとε
L の両者の影響を応答良く補償できる.このため,図では,ε
φ が長い間発生し続けることはない.しかしながら,STC はフ ィードバックアルゴリズムであるため,ε
φが発生しなければ その補償動作は生じないため,エンジン負荷の増減に伴うLin の変化時に発生するスパイク状のε
φを抑制することはできな い. Fig.11 は,Fig.8 に示した STC にフィードフォワード適応 器を追加した手法の結果である.この手法では,Wrsmによるε
modの修正により,ε
φがパージガスの影響による成分とε
Lの 影響による成分に分離されるため,フィードフォワード適応 器によって算出されるDLはε
Lのみを補償し,STC がパージ ガスの影響を補償するようになる.よって,STC とフィード フォワード適応は干渉することなく,DLはε
Lを補償するため の真値に収束し,Fig.10 にて発生していたスパイク状のε
φは 大幅に抑制される.ε
mod(k) = φ
mod(k) -
φ
op(k-3) (16)
ε
mod(k) = φ
mod(k) -
φ
op(k-3) (16)
ε
rsm(k) = Wrsm(k)ε
mod(k) (19)ε
rsm(k) = Wrsm(k)ε
mod(k) (19)S : 切換関数設定パラメータ (-1< S<0)
K
rch,K
adp,
δ :フィードバックゲイン(適応ゲイン)
σ(k) = ε
rsm(k) + S ε
rsm(k-1)
(20)
D
rch(k) = K
rch(σ(k) + δ sign(σ(k)))
(21)
(22)
D
adp(k) = K
adpΣ
i=0σ(i)
kD
L(k) = D
rch(k) + D
adp(k)
(23)
S : 切換関数設定パラメータ (-1< S<0)
K
rch,K
adp,
δ :フィードバックゲイン(適応ゲイン)
S : 切換関数設定パラメータ (-1< S<0)
K
rch,K
adp,
δ :フィードバックゲイン(適応ゲイン)
σ(k) = ε
rsm(k) + S ε
rsm(k-1)
(20)
D
rch(k) = K
rch(σ(k) + δ sign(σ(k)))
(21)
(22)
D
adp(k) = K
adpΣ
i=0σ(i)
kD
L(k) = D
rch(k) + D
adp(k)
(23)
R
cyl= ΔG
cyl/
ΔL
in(17)
R
cyl= ΔG
cyl/
ΔL
in(17)
Fig. 10 Simulation result of the controller using
only STC
0 50 100 150 200 0 5 10 Control cycle 0 2 4 6 0.8 1.0 1.2 Lift Lin (mm) Purge Fuel ratio (%) Feedback coefficient Kf -0.2 0 0.2 Deviation valueε
φFig. 10 Simulation result of the controller using
only STC
0 50 100 150 200 0 5 10 Control cycle 0 2 4 6 0.8 1.0 1.2 Lift Lin (mm) Purge Fuel ratio (%) Feedback coefficient Kf -0.2 0 0.2 Deviation valueε
φ 0 50 100 150 200 0 50 100 150 200 0 5 10 0 5 10 Control cycle 0 2 4 6 0 2 4 6 0.8 1.0 1.2 0.8 1.0 1.2 Lift Lin (mm) Purge Fuel ratio (%) Feedback coefficient Kf -0.2 0 0.2 Deviation valueε
φ -0.15 -0.10 -0.05 0 0 50 100 150 200 -0.2 0 0.2 0 5 10 Control cycle 0 2 4 6 0.8 1.0 1.2 Lift Lin (mm) Purge Fuel ratio (%) Deviation valueε
φ Feedback coefficient Kf Collection Value DLFig. 11 Simulation result of newly proposed controller
using STC and feedforward adapter
-0.15 -0.10 -0.05 0 -0.15 -0.10 -0.05 0 0 50 100 150 200 0 50 100 150 200 -0.2 0 0.2 0 5 10 0 5 10 Control cycle 0 2 4 6 0 2 4 6 0.8 1.0 1.2 0.8 1.0 1.2 Lift Lin (mm) Purge Fuel ratio (%) Deviation value
ε
φ Feedback coefficient Kf Collection Value DLFig. 11 Simulation result of newly proposed controller
using STC and feedforward adapter
W
rsm(k) = Weight RSM (L
in(k),C
in(k),N
e(k) )
= R
cyl(L
in(k),C
in(k),N
e(k)) / R
cyl_max(18)
W
rsm(k) = Weight RSM (L
in(k),C
in(k),N
e(k) )
= R
cyl(L
in(k),C
in(k),N
e(k)) / R
cyl_max(18)
このことから,本研究における提案手法が
φ
inの制御性向上 に有効であることが確認できる. 6. 実機テスト結果 仮想的にε
Lを与えることによりε
φを発生させた連続可変リ フトエンジンにFig.8 に示した提案手法による空燃比制御系 を適用し,FTP-75 モードを走行したときのφ
inの制御結果を Fig.12 に示す. 図の結果は,STC のみにより制御を行った Fig.7 の結果に 比べて,アイドル時や過渡時のφ
inのφ
opへの制御性が明らか に向上しており,900sec 以降の緩やかな加減速にけるφ
inの揺 らぎ挙動も明らかに低減している. これらのことから, フィードフォワード適応器を追加した 空燃比制御系の有効性を実機エンジンにおいても確認するこ とができた. 6. おわりに 連続可変リフトエンジンの空燃比制御に関する課題とその 発生原理について述べ,それを解決する手法として,従来の STC を用いた空燃比制御系に対し,適応機能をもったフィー ドフォワードアルゴリズムを追加することを提案した. また,その手法を実際の連続可変リフトエンジンに適用し, その効果を示した. 参 考 文 献1) K. Nishizawa and S. Momoshita : Nissan’s Gasoline Sulev Technology, SAE Paper 2000-01-1583 (2000)
2) H. Kitagawa and Y. Yasui : L4-Engine Development for a Super Ultra Low Emission Vehicle, SAE Paper 2000-01-0887 (2000)
3) A. Ohata and M. Ohashi : Model-Based Air Fuel Ratio Control for Reducing Exhaust Gas Emissions, SAE Paper 950075 (1995)
4) M. Hidetaka and S. Akazaki :Real Time Engine Control Using STR in Feedback System, SAE Paper 950007 (1995) 5) K. Suzuki and T. Shen : Individual A/F Control with Fuel-Gas Estimation for Multi-Cylinder IC Engines, IEEE paper ACC2007 Fr.B06.3 (2007)
6) H. Hosoya and H. Yoshizawa : Development of New Concept Control System for Valve Timing Control, SAE Paper 2000-01-1226 (2000) Institution of Mechanical 7)Engineers : Modelling a Variable Valve Timing Spark Ignition Engine Using Different Neural Networks, Journal of Automobile Engineering, Vol. 218, No. D10 (2004) 8) Institution of Mechanical Engineers : Modelling a Variable Valve Timing Spark Ignition Engine Using Different Neural Networks, Journal of Automobile Engineering, Vol. 218, No. D10 (2004)
9) 寺尾満,金井喜美雄:ロバスト適応制御入門,東京,187p, オーム社,1989 10) 野波健蔵,田宏奇:スライディングモード制御,263p, コロナ社,1994 [著 者 紹 介] 安 井 裕 司 (正会員) 1994 年 東京理科大学 大学院 機械工学専 攻 修士課程修了.同年(株)本田技術研究 所入社.以後,ガソリンエンジンの低エミ ッション技術の研究,電子制御スロットル や自動マニュアルトランスミッションの開 発,車両トラクション制御の研究,次世代パワープラントの 研究に従事.日本機会学会会員. 川 澄 郁 絵 2004 年 日本大学 大学院 機械工学専攻 修士過程修了.同年(株)本田技術研究所 入 社.以後,連続可変リフトガソリンエンジン の低エミッシン技術,および,自動適合技術 の研究,車両トラクション制御の研究,ジェ ットエンジンの開発に従事. 東 谷 幸 祐 2001 年 京都工芸繊維大学 大学院 工芸 科学研究科 電子情報工学専攻 修士課程修了. 同年(株)本田技術研究所 入社.以後,ガソ リンエンジン用ECU の開発,連続可変リフ トガソリンエンジンの低エミッシン技術,お よび,アイドル制御の研究,次世代パワープ ラント用ECU の研究に従事. φin φop Vehicle speed