解析を用いた
EV 用モータの振動発生メカニズム解明及び低減検討例
*宮川 隆行1) 榎本 俊夫2) 小宮 洋志3) 初田 匡之4) 谷本 勉5)
Vibration mechanism of the motor for EV by analysis and An example of the vibration reduction countermeasures
Takayuki Miyakawa Toshio Enomoto Hiroshi Komiya Tadayuki Hatsuda Tsutomu Tanimoto The electric vehicle which is one of the zero emission vehicle is aimed at the acceptable thing widely favorably to the market and high performance, it is found in the quietness to assume it an attractive vehicle. A motor noise is famous for the representative vibration and noise phenomenon of the electric vehicle. A motor noise decrease has the measures method in the body and the chassis, but making low vibration of the motor which is source of vibration and noise is important. This paper introduces the occurred mechanism of an order frequency becoming the problem and Analytical technology to predict high-precision motor vibration. In addition, this paper introduces the study result and the mechanism inspection result to reduce the motor vibration which aimed at a motor fabric and the specification such as slot combination or the dimension by the experiment.
KEY WORDS: vibration, noise, and ride comfort, quietness, Electric vehicle (B3) 1.ま え が き 昨今,自動車からの CO2 排出量削減が急務であり,アイドリ ングストップ機能,クリーンディーゼル,ハイブリッド車をは じめとした環境負荷の低い車両が市場に普及しつつある.近 年,販売されているゼロ・エミッション車の一つである電気自 動車も広く一般ユーザへ普及してきている (1) (2) (3). 電気自動車は,既存のエンジン搭載車と異なり,パワーソー スにモータを有している為,市場からはエンジン音がなく静 粛性が高い車両のイメージがあり,静粛性への要求も高い.し かし,電気自動車は,長期間改良を重ねているエンジンと異な り新開発のモータを有している為,想定していない振動,騒音 現象が発生する場合がある.その代表的な振動,騒音現象はモ ータノイズが挙げられる.モータノイズ低減には,車体やシャ シーでの対策方法もあるが,起振源であるモータの低起振力 化が重要である. (4) (5) 従来,モータの低起振力化としては,制 御による手法が多く発表されているが,モータ本体の構造変 更による起振力低減による発表は少ない(6) (7) (8). 本稿では,静粛性の高いモータを開発する為,開発の初期段 階から固定子と回転子の組み合わせであるスロットコンビネ ーションや寸法等のモータ基本構造やスペックに着眼した技 術検討結果の事例について報告する *2013 年 6 月 18 日受理. 2013 年 5 月 23 日自動車技術会春季学術講演会において発表 1)・2)・3)日産自動車(株) 車両性能開発部 (243-0123 厚木 市森の里青山 1-1) 4)・5)日産自動車(株) 先行車両開発部 (243-0123 厚木市森 の里青山 1-1) 2.電気自動車用モータの振動・騒音現象について 2.1. モータの振動・騒音現象と課題 一般的にエンジン搭載車は,ギアの変速を用いてトルクや 車速を変動するのに対し,電気自動車はモータ一つでトルク や車速を変動させる必要がある.(Fig.1) モータの使用回転域 が広く,要求トルクも高い為,電気自動車用モータは振動・騒 音が問題になる場合がある.パワートレインから発生する振 動・騒音はエンジンの場合,こもり音や加速時騒音があるが, 電気自動車の場合,複数の次数のモータノイズが低周波から 超高周波領域まで発生する(Fig.2).このモータノイズ低減の 為,低周波から超高周波までの低起振力モータとそれを支え る技術が必要である.
Fig.2 Vibration and the noise to occur from a power train Fig.1 Drive performance of ICE and EV
Fig.1 Drive performance of ICE and EV
2.2. モータの振動評価実験方法 電気自動車のモータとして,複数のタイプのモータが存在 する.自動車用駆動モータとしては,高効率,高トルク,高出力 が必要であり,一般的に埋込磁石型の永久磁石同期モータ (IPMSM)を採用している例が多い.今回,分布巻きモータより コイルエンドを薄くする事が可能な集中巻きモータについて 検討した.(Fig.3) 今回検討したモータの基本構造を表 1 に 示す.本検討モータは,スロットコンビネーション(磁石数と スロット数の組を意味する)が 16 極(=磁石数)24 スロット(= ティース数)であり,比較的モータ外径がφ300mm と大きく, 軸長が 40mm と短い特徴がある 本検討モータを図4 の様な実験システムに取り付け,実験を 施した(Fig.4).実験方法は,モータ回転数を 300rpm から 7000rpm まで回転させ,モータケースの外周の複数個所に 3 軸 加速度センサーを配置し振動測定を行った. 2.3. モータの振動評価実験の結果 図 5 の実験結果から,本モータはトルクリップルが主要因で 発生する電気角 6 次成分以外に電気角 2 次成分も主要次数で ある事が分る.(Fig.5) 集中巻モータは、ステータの U,V,W 相が繰り返し続く事から電気的に 1 周期する範囲で検討する 事が可能であり、電気的に 1 周期した状態を電気角 1 周期と 定義する(Fig.6).一般的に電気角 2 次成分の振動が高い場 合,U,V,W 相の電流不平衡が考えられるが本実験では電流不平 衡が無いように調整してから実施している為,他のメカニズ ムで発生している.また,モータ振動は回転方向が問題となる 事が多いが,図 7 の通り電気角2次成分の振動は半径方向の振 動と周方向の振動同等レベルであり,半径方向の振動も課題 である事が分る.(Fig.7) 電気角 2 次成分が発生する理由と して,ステータ・ケース剛性が理想的な状態(剛体)であれば, 電気角 2 次成分の電磁加振力の合力は 0 となるが,現実のモー タのステータ・ケース剛性は低く発生する事がある.本メカニ ズムについては,3.2 の項で詳細に説明する. ,
Fig.3 the studied motor Table1 Spec of the studied motor
Fig.5 3D map of the rotation speed, frequency, and vibration level
Fig.7 Vibration levels in the motor’s radial and rotatory directions Fig4 Experimental device configuration
Fig.7 Vibration levels in the motor’s radial Fig.6 About electric angle of concentrated winding motor
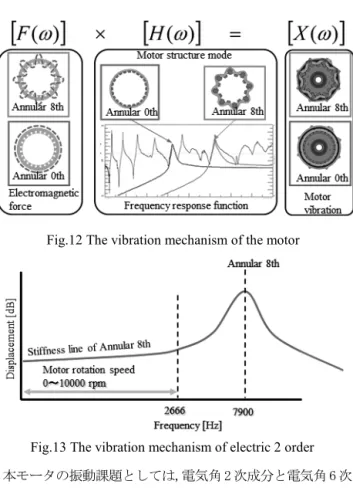
3.解析によるメカニズム解明 3.1. モータの振動解析手法 開発の初期段階から低起振力モータ開発を行う為には,解 析によるメカニズム解明や高精度の予測技術が必要である. 本項では,モータの振動解析方法と予測技術について論ずる. 図 8 にモータの振動解析方法の概略を示す.(Fig.8) モータ 内で発生する電磁加振力は,磁場解析ソフト用いて予測し,そ の電磁加振力を周波数変換し構造解析ソフトでモータの振動 を予測する. 詳細なモータの振動解析手法を図 9 に示す.(Fig.9) 磁場 解析で回転数毎にモータのステータとロータ表面に発生する 時系列データの電磁加振力を算出し,それぞれ周波数変換し た結果から次数分析を行い,電気角 2 次成分と電気角 6 次成分 の電磁加振力を抽出する.抽出した電磁加振力を構造解析モ デルのステータ表面及びロータ表面の半径方向と周方向に入 力しモータの振動を予測する. 本予測手法による予測精度を図 10,図 11 に示す.(Fig.10) (Fig.11) 電気角 2 次成分,電気角 6 次成分共に低回転から高 回転まで通電時のモータ振動を精度良く再現出来ており,高 精度にモータ振動を予測する解析手法を構築した. 3.2. モータの振動発生メカニズム 前項で構築した高精度な解析モデルを用いて,電気角 2 次成 分,電気角 6 次成分の振動発生メカニズムを分析した.各次数 で発生するモータ加振力は U,V,W 相の位相により電磁加振力 モードが決定される.16 極 24 スロットの本モータの電気角 2 次成分は,U,V,W 相に発生する電磁加振力の位相差が 120 度ず つになり電気角 1 周期(3 ティース分)で加振力は 1 周期する加 振力分布となる為,24 スロットある本モータの場合(24÷3=8), 円環 8 次の加振力モードとなる.一方,電気角 6 次成分は各相 での位相差が 360 度になり全ティースで同方向の加振力とな る為,円環 0 次の電磁加振力モードとなる.また,構造により決 まるモータの振動特性は複数の円環モードの重ね合わせで構 成され,それぞれのモードは独立している.上記から,各次数 成分のモータ振動は,各次数成分の電磁加振力モードに起因 した固有振動モードのみが励起されるメカニズムであり,1 自 由度の振動現象として解釈出来る.(Fig.12) これにより,図 10 の電気角 2 次成分は,円環 8 次の 1 自由度の振動問題であり, 図 11 の電気角 6 次成分は,円環 0 次の 1 自由度の振動問題と なる事がわかる.また,図 11 にある 2500rpm 付近のピークは, モータを支える治具共振である.図 13 に示している通り,電気 角 2 次成分のモータ振動は, 円環 8 次の共振が実際のモータ 仕様回転領域内に存在せず,円環 8 次の剛性領域内で発生して いる.(Fig.13)
Fig.8 Outline about the vibration analytical technique of the motor
Fig.9 The vibration analytical technique of the motor
Fig.10 The motor’s radial vibration level at electric angle 2 order
Fig.11 The motor’s radial vibration level at electric angle 6 order
2.2. モータの振動評価実験方法 電気自動車のモータとして,複数のタイプのモータが存在 する.自動車用駆動モータとしては,高効率,高トルク,高出力 が必要であり,一般的に埋込磁石型の永久磁石同期モータ (IPMSM)を採用している例が多い.今回,分布巻きモータより コイルエンドを薄くする事が可能な集中巻きモータについて 検討した.(Fig.3) 今回検討したモータの基本構造を表 1 に 示す.本検討モータは,スロットコンビネーション(磁石数と スロット数の組を意味する)が 16 極(=磁石数)24 スロット(= ティース数)であり,比較的モータ外径がφ300mm と大きく, 軸長が 40mm と短い特徴がある 本検討モータを図4 の様な実験システムに取り付け,実験を 施した(Fig.4).実験方法は,モータ回転数を 300rpm から 7000rpm まで回転させ,モータケースの外周の複数個所に 3 軸 加速度センサーを配置し振動測定を行った. 2.3. モータの振動評価実験の結果 図 5 の実験結果から,本モータはトルクリップルが主要因で 発生する電気角 6 次成分以外に電気角 2 次成分も主要次数で ある事が分る.(Fig.5) 集中巻モータは、ステータの U,V,W 相が繰り返し続く事から電気的に 1 周期する範囲で検討する 事が可能であり、電気的に 1 周期した状態を電気角 1 周期と 定義する(Fig.6).一般的に電気角 2 次成分の振動が高い場 合,U,V,W 相の電流不平衡が考えられるが本実験では電流不平 衡が無いように調整してから実施している為,他のメカニズ ムで発生している.また,モータ振動は回転方向が問題となる 事が多いが,図 7 の通り電気角2次成分の振動は半径方向の振 動と周方向の振動同等レベルであり,半径方向の振動も課題 である事が分る.(Fig.7) 電気角 2 次成分が発生する理由と して,ステータ・ケース剛性が理想的な状態(剛体)であれば, 電気角 2 次成分の電磁加振力の合力は 0 となるが,現実のモー タのステータ・ケース剛性は低く発生する事がある.本メカニ ズムについては,3.2 の項で詳細に説明する.
Fig.3 the studied motor Table1 Spec of the studied motor
Fig.5 3D map of the rotation speed, frequency, and vibration level
Fig.7 Vibration levels in the motor’s radial and rotatory directions Fig4 Experimental device configuration
Fig.6 About electric angle of concentrated winding motor
3.解析によるメカニズム解明 3.1. モータの振動解析手法 開発の初期段階から低起振力モータ開発を行う為には,解 析によるメカニズム解明や高精度の予測技術が必要である. 本項では,モータの振動解析方法と予測技術について論ずる. 図 8 にモータの振動解析方法の概略を示す.(Fig.8) モータ 内で発生する電磁加振力は,磁場解析ソフト用いて予測し,そ の電磁加振力を周波数変換し構造解析ソフトでモータの振動 を予測する. 詳細なモータの振動解析手法を図 9 に示す.(Fig.9) 磁場 解析で回転数毎にモータのステータとロータ表面に発生する 時系列データの電磁加振力を算出し,それぞれ周波数変換し た結果から次数分析を行い,電気角 2 次成分と電気角 6 次成分 の電磁加振力を抽出する.抽出した電磁加振力を構造解析モ デルのステータ表面及びロータ表面の半径方向と周方向に入 力しモータの振動を予測する. 本予測手法による予測精度を図 10,図 11 に示す.(Fig.10) (Fig.11) 電気角 2 次成分,電気角 6 次成分共に低回転から高 回転まで通電時のモータ振動を精度良く再現出来ており,高 精度にモータ振動を予測する解析手法を構築した. 3.2. モータの振動発生メカニズム 前項で構築した高精度な解析モデルを用いて,電気角 2 次成 分,電気角 6 次成分の振動発生メカニズムを分析した.各次数 で発生するモータ加振力は U,V,W 相の位相により電磁加振力 モードが決定される.16 極 24 スロットの本モータの電気角 2 次成分は,U,V,W 相に発生する電磁加振力の位相差が 120 度ず つになり電気角 1 周期(3 ティース分)で加振力は 1 周期する加 振力分布となる為,24 スロットある本モータの場合(24÷3=8), 円環 8 次の加振力モードとなる.一方,電気角 6 次成分は各相 での位相差が 360 度になり全ティースで同方向の加振力とな る為,円環 0 次の電磁加振力モードとなる.また,構造により決 まるモータの振動特性は複数の円環モードの重ね合わせで構 成され,それぞれのモードは独立している.上記から,各次数 成分のモータ振動は,各次数成分の電磁加振力モードに起因 した固有振動モードのみが励起されるメカニズムであり,1 自 由度の振動現象として解釈出来る.(Fig.12) これにより,図 10 の電気角 2 次成分は,円環 8 次の 1 自由度の振動問題であり, 図 11 の電気角 6 次成分は,円環 0 次の 1 自由度の振動問題と なる事がわかる.また,図 11 にある 2500rpm 付近のピークは, モータを支える治具共振である.図 13 に示している通り,電気 角 2 次成分のモータ振動は, 円環 8 次の共振が実際のモータ 仕様回転領域内に存在せず,円環 8 次の剛性領域内で発生して いる.(Fig.13)
Fig.8 Outline about the vibration analytical technique of the motor
Fig.9 The vibration analytical technique of the motor
Fig.10 The motor’s radial vibration level at electric angle 2 order
Fig.11 The motor’s radial vibration level at electric angle 6 order
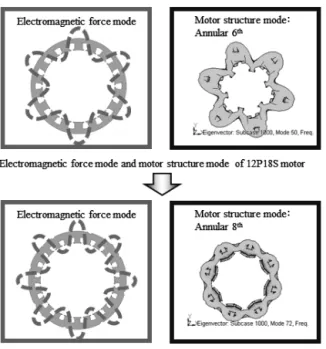
本モータの振動課題としては,電気角 2 次成分と電気角 6 次 成分の 2 つの主要次数成分があるが,電気角 6 次成分はトルク リップルが主要因であり,発生メカニズム及び低減効果につ いては,数多く発表されている事から次項以降,電気角 2 次を 代表に低減方策について論ずる(5) (8 )(9)(10)(11) 4.電気角 2 次の振動低減方策の一例 4.1. モータケース剛性向上とモータの スロットコンビネーション変更による効果検証 本モータの電気角 2 次成分の振動を低減する為,複数ある低 減方策の内,本稿では以下二つの低減方策事例について紹介 する.また、上記のスロットコンビネーション変更とは, 磁石 数とティース数の組を変更する事を意味している. 方策 A:断面 2 次モーメント向上(固有値の向上)に よる低起振力化 方策 B:電磁加振力モードに起因する為,スロットコンビ ネーションを上げ電磁加振力の円環モードの高次 化による低起振力化 上記 2 つの低起振力化の効果を以下の試作モータにて実験 検証する.実験方法は,図 4 の通りである.(Fig.4) 試作モータ①:本検討モータからスロットコンビネーション のみ変更(16P24S⇒12P18S に変更) 試作モータ②:試作モータ①からアルミケースの肉厚のみ 変更(5mm⇒10mm に変更) 試作モータ③:本検討モータ(Tab.1) それぞれの試作モータの電気角 2 次成分に起因するモータ の固有モードと周波数は,表 2 の通りである.(Tab.2) 方策 A の狙いは剛性向上による低起振力化であり,試作モー タ①と試作モータ②の円環 6 次固有値の向上分であり 2dB の 効果があると予測している.図 14 に示す通り,通電による実験 結果から予測 2dB に対し実験でも 2dB となり,予測通り低減出 来ている事がわかった.(Fig.14) 一方,方策 B の狙いは図 15 に示した通り,スロットコンビネ ーション変更による電磁加振力の円環モードの高次化による 低起振力化であり,試作モータ①の円環 6 次から試作モータ③ の円環 8 次への固有値向上分である約 11dB の効果があると予 測している.(Fig.15)
Table2 Experimental result:Eigen value of Annular mode
Fig.12 The vibration mechanism of the motor
Fig.13 The vibration mechanism of electric 2 order
Fig.14 Experimental result:Effect by the stiffness improvement of the electric angle 2 order
図 16 に示す通り,通電による実験結果から予測 11dB に対し 実験でも 9dB となり,概ね予測通り低減出来ている事がわかっ た.(Fig.16) 試作モータを用いた実験検証を行った結果,方策 A,方策 B ともに電気角 2 次の振動を低減する為には効果大である事を 確認出来た.また,同時に電気角 2 次の振動発生メカニズムの 検証も行う事が出来た. 5.ま と め 本稿では,高精度にモータ振動を予測する解析手法につい て構築し,電気角 2 次成分,電気角 6 次成分の発生メカニズム を明確にした.また,実機を用いて電気角 2 次成分を低減する 方策事例についても紹介した.これらの事から,静粛性の高い モータを開発する為には,モータ開発の初期段階からスロッ トコンビネーションや寸法等のモータ基本構造やスペックが 重要である事を明確にした. 参 考 文 献 (1) 日産自動車ホームページ,電気自動車総合情報サイト, http://ev.nissan.co.jp/ (2) 濱野崇ら:新開発 EV のギヤノイズ低減技銃, 自動車技 術会学術講演会前刷集, Vol.56-11, p.1-4(2011) (3) 佐藤義則ら:日産リーフ向けモータ&インバータの開発, 日産技報,No69・70,p.21-24(2012) (4) 鎌塚均ら:新開発 EV の静粛性向上に関する技術開発, 自動車技術会学術講演会前刷集,No.56-11,p.5-8(2011) (5) 北條秀樹ら:新開発 EV の静粛性向上に関する技術開発, 自動車技術会学術講演会前刷集,No.56-11,p.5-8(2011) (6) 兼松正人ら:IPMSM の時速分布を考慮した d 軸電流によ るラジアル力抑制の基礎検討,JI-ASC2012 ,p.Ⅲ-215-218 (2012)
(7) H,Yashiro:Reduction of a Radial Electromagnetic Oscillating Force of an Electrical Motor by Superposing a High Order Current, Transactions of the Japan Society of MechanicalEngineers.C,Vol.72,No.715,p723-728 (2006) (8) K. Yohsimoto: Harmonic Current Control for IPM Motors,2003 National Convention Record, IEE Japan , No.4-146(2003) (9) 武田洋次ら:埋込磁石同期モータの設計と制御,株式会 社オーム,p98-100(2001) (10) 海老原大樹ら:モータ技術ハンドブック,日刊工業新聞 社,p763(2001) (11)見城尚志ら:新・ブラシレスモータ,総合電子出版社 p149,157-179(2000)
Fig.15 The vibration mechanism by slot combination improvementof the electric angle 2 order
Fig.16 Experimental result:Effect by slot combination improvement of the electric angle 2 order
本モータの振動課題としては,電気角 2 次成分と電気角 6 次 成分の 2 つの主要次数成分があるが,電気角 6 次成分はトルク リップルが主要因であり,発生メカニズム及び低減効果につ いては,数多く発表されている事から次項以降,電気角 2 次を 代表に低減方策について論ずる(5) (8 )(9)(10)(11) 4.電気角 2 次の振動低減方策の一例 4.1. モータケース剛性向上とモータの スロットコンビネーション変更による効果検証 本モータの電気角 2 次成分の振動を低減する為,複数ある低 減方策の内,本稿では以下二つの低減方策事例について紹介 する.また、上記のスロットコンビネーション変更とは, 磁石 数とティース数の組を変更する事を意味している. 方策 A:断面 2 次モーメント向上(固有値の向上)に よる低起振力化 方策 B:電磁加振力モードに起因する為,スロットコンビ ネーションを上げ電磁加振力の円環モードの高次 化による低起振力化 上記 2 つの低起振力化の効果を以下の試作モータにて実験 検証する.実験方法は,図 4 の通りである.(Fig.4) 試作モータ①:本検討モータからスロットコンビネーション のみ変更(16P24S⇒12P18S に変更) 試作モータ②:試作モータ①からアルミケースの肉厚のみ 変更(5mm⇒10mm に変更) 試作モータ③:本検討モータ(Tab.1) それぞれの試作モータの電気角 2 次成分に起因するモータ の固有モードと周波数は,表 2 の通りである.(Tab.2) 方策 A の狙いは剛性向上による低起振力化であり,試作モー タ①と試作モータ②の円環 6 次固有値の向上分であり 2dB の 効果があると予測している.図 14 に示す通り,通電による実験 結果から予測 2dB に対し実験でも 2dB となり,予測通り低減出 来ている事がわかった.(Fig.14) 一方,方策 B の狙いは図 15 に示した通り,スロットコンビネ ーション変更による電磁加振力の円環モードの高次化による 低起振力化であり,試作モータ①の円環 6 次から試作モータ③ の円環 8 次への固有値向上分である約 11dB の効果があると予 測している.(Fig.15)
Table2 Experimental result:Eigen value of Annular mode
Fig.12 The vibration mechanism of the motor
Fig.13 The vibration mechanism of electric 2 order
Fig.14 Experimental result:Effect by the stiffness improvement of the electric angle 2 order
図 16 に示す通り,通電による実験結果から予測 11dB に対し 実験でも 9dB となり,概ね予測通り低減出来ている事がわかっ た.(Fig.16) 試作モータを用いた実験検証を行った結果,方策 A,方策 B ともに電気角 2 次の振動を低減する為には効果大である事を 確認出来た.また,同時に電気角 2 次の振動発生メカニズムの 検証も行う事が出来た. 5.ま と め 本稿では,高精度にモータ振動を予測する解析手法につい て構築し,電気角 2 次成分,電気角 6 次成分の発生メカニズム を明確にした.また,実機を用いて電気角 2 次成分を低減する 方策事例についても紹介した.これらの事から,静粛性の高い モータを開発する為には,モータ開発の初期段階からスロッ トコンビネーションや寸法等のモータ基本構造やスペックが 重要である事を明確にした. 参 考 文 献 (1) 日産自動車ホームページ,電気自動車総合情報サイト, http://ev.nissan.co.jp/ (2) 濱野崇ら:新開発 EV のギヤノイズ低減技銃, 自動車技 術会学術講演会前刷集, Vol.56-11, p.1-4(2011) (3) 佐藤義則ら:日産リーフ向けモータ&インバータの開発, 日産技報,No69・70,p.21-24(2012) (4) 鎌塚均ら:新開発 EV の静粛性向上に関する技術開発, 自動車技術会学術講演会前刷集,No.56-11,p.5-8(2011) (5) 北條秀樹ら:新開発 EV の静粛性向上に関する技術開発, 自動車技術会学術講演会前刷集,No.56-11,p.5-8(2011) (6) 兼松正人ら:IPMSM の時速分布を考慮した d 軸電流によ るラジアル力抑制の基礎検討,JI-ASC2012 ,p.Ⅲ-215-218 (2012)
(7) H,Yashiro:Reduction of a Radial Electromagnetic Oscillating Force of an Electrical Motor by Superposing a High Order Current, Transactions of the Japan Society of MechanicalEngineers.C,Vol.72,No.715,p723-728 (2006) (8) K. Yohsimoto: Harmonic Current Control for IPM Motors,2003 National Convention Record, IEE Japan , No.4-146(2003) (9) 武田洋次ら:埋込磁石同期モータの設計と制御,株式会 社オーム,p98-100(2001) (10) 海老原大樹ら:モータ技術ハンドブック,日刊工業新聞 社,p763(2001) (11)見城尚志ら:新・ブラシレスモータ,総合電子出版社 p149,157-179(2000)
Fig.15 The vibration mechanism by slot combination improvementof the electric angle 2 order
Fig.16 Experimental result:Effect by slot combination improvement of the electric angle 2 order
図 16 に示す通り,通電による実験結果から予測 11dB に対し 実験でも 9dB となり,概ね予測通り低減出来ている事がわかっ た.(Fig.16) 試作モータを用いた実験検証を行った結果,方策 A,方策 B ともに電気角 2 次の振動を低減する為には効果大である事を 確認出来た.また,同時に電気角 2 次の振動発生メカニズムの 検証も行う事が出来た. 5.ま と め 本稿では,高精度にモータ振動を予測する解析手法につい て構築し,電気角 2 次成分,電気角 6 次成分の発生メカニズム を明確にした.また,実機を用いて電気角 2 次成分を低減する 方策事例についても紹介した.これらの事から,静粛性の高い モータを開発する為には,モータ開発の初期段階からスロッ トコンビネーションや寸法等のモータ基本構造やスペックが 重要である事を明確にした. 参 考 文 献 (1) 日産自動車ホームページ,電気自動車総合情報サイト, http://ev.nissan.co.jp/ (2) 濱野崇ほか:新開発 EV のギヤノイズ低減技銃, 自動車 技術会学術講演会前刷集, Vol.56-11, p.1-4(2011) (3) 佐藤義則ほか:日産リーフ向けモータ&インバータの開 発,日産技報,No69・70,p.21-24(2012) (4) 鎌塚均ほか:新開発 EV の静粛性向上に関する技術開発, 自動車技術会学術講演会前刷集,No.56-11,p.5-8(2011) (5) 北條秀樹ほか:新開発 EV の静粛性向上に関する技術開 発,自動車技術会学術講演会前刷集,No.56-11,p.5-8(2011) (6) 兼松正人ほか:IPMSM の時速分布を考慮した d 軸電流に よるラジアル力抑制の基礎検討,JI-ASC2012 ,p.Ⅲ-215-218 (2012)
(7) H,Yashiro:Reduction of a Radial Electromagnetic Oscillating Force of an Electrical Motor by Superposing a High Order Current, Transactions of the Japan Society of MechanicalEngineers.C,Vol.72,No.715,p723-728 (2006) (8) K. Yohsimoto: Harmonic Current Control for IPM Motors,2003 National Convention Record, IEE Japan , No.4-146(2003) (9) 武田洋次ほか:埋込磁石同期モータの設計と制御,株式 会社オーム,p98-100(2001) (10) 海老原大樹ほか:モータ技術ハンドブック,日刊工業新 聞社,p763(2001) (11)見城尚志ほか:新・ブラシレスモータ,総合電子出版社 p149,157-179(2000)
Fig.15 The vibration mechanism by slot combination improvementof the electric angle 2 order
Fig.16 Experimental result:Effect by slot combination improvement of the electric angle 2 order