Intelligence in Loop
Naoto Iwahashi
∗Okayama Pref Univ
Abstract: This study provides new perspective on human and machine intelligence with a focus on its double loop dynamics comprising an outer model loop and an inner search loop. We argue that it is critical to forming mutual beliefs. Low-level sensory-motor and high-level cognitive activities are both established in the coupling of such loop dynamics. A unified theory and its application are discussed.
1
Introduction
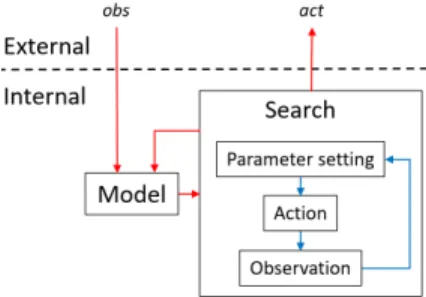
Intelligence arises from the coupling of the dynamics of internal and external states. The nature, mecha-nisms, and functions of such coupling have long been discussed in the fields of philosophy, science, and tech-nology [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13]. This paper focuses on the double loop dynamics of intel-ligence, comprising 1) a model loop (outer red loop) and 2) a search loop (inner blue loop), as shown in Fig. 1. We argue that it plays an critical role in forming mutual beliefs. Both low-level sensory-motor and high-level cognitive activities, including language and communication, are established in the coupling of such double loop dynamics.
Mutual beliefs are classified into two categories: 1) empirical and 2) universal. The empirical mutual be-liefs are classified into personal and social categories. The universal mutual beliefs are classified into physics and psychological categories. The mutual beliefs are intersubjective and meta-cognitive function, and we can consider hierarchy in them; second-order mutual beliefs are defined as the beliefs that each participant believes all participants share their first-order mutual beliefs.
In the following sections, loops forming physics mutual beliefs, Physics Projection, loops forming em-pirical mutual beliefs, Mutual Action Control, and loops with mutual belief hierarchy, Equilibrium
Adap-tation, will be described.
Figure 1: Double loop structure consisting of model and search
∗Contact: E-mail: [email protected]
2
Physics Projection
Physics Projection is a new approach to
incorporat-ing the physical world into artificial intelligence. It utilizes the internal (mental) model of the external (physical) world to understand the physical world [14]. The physics projection works for forming and using universal physics mutual beliefs. The process of physics projection has a double loop structure comprising model and search loops. The model loop is executed as the machine performs actions and makes observations in the physical world; thus, the physical world model is learned actively and online. The search loop is exe-cuted as a process in the model loop to evaluate nu-merous candidates and identify an appropriate action.
3
Mutual Action Control
Mutual Action Control is a decentralized control
prob-lem with mutual beliefs in general. To achieve ap-propriate control, the agents must achieve a mutual understanding. We proposed the mutual action con-trol model with mutual belief hierarchy, that has the same double loop structure as physics projection. The structure of mutual belief hierarchy in the decentral-ized control process is depicted in Fig. 2. It can be applied to high-level cognitive activities, such as lan-guage and communication.
In the following subsections, two applications of the mutual action control will be described: commu-nication and driving.
3.1
Communication
We developed the computational model of human– machine linguistic and physical communication,
L-Core [15]. It is also capable of interactive language
acquisition.
Linguistic and physical communication is based on various constraints such as physical, sensory-motor, psychological, conceptual, and experiential constraints. These constraints should be incorporated into the model. Among all the constraint types, physical constraints may be an important basis. However, no existing
人工知能学会研究会資料 SIG-SLUD-B901-02
Figure 2: Diagram for mutual action control with mu-tual belief hierarchy
high-order cognitive systems can incorporate physical constraints directly.
The double loop structures in the physics projec-tion and the mutual acprojec-tion control become identi-cal, although they operate at different spatiotemporal scales and handle different conceptual granularities. Therefore, the physical constraints obtained by the physics projection can be incorporated into the pro-cess of the mutual action control easily.
3.2
Driving
A new control framework, Equilibrium Predictive
Con-trol, was proposed [16]. It can control vehicles in
mu-tually cooperative way while predicting mumu-tually co-operative other vehicles’ actions. It is characterized by three features: 1) mutual belief hierarchy, 2) equi-librium selective adaptation, and 3) model predictive control.
4
Equilibrium Adaptation
The previous studies on decentralized agent control problem have focused on the equilibrium convergence. However, many typical problems have an infinite num-ber of equilibrium points, so equilibrium selection should be focused on to practically solve it. We proposed novel method, Equilibrium Adaptation [16], which en-ables an agent to adapt its strategy on equilibrium selection with mutual belief hierarchy. Although equi-librium selective adaptation has been evaluated in au-tonomous driving technology, the idea is quite general and applicable to wide range of research fields.
5
Discussion
The double loop dynamics of human and machine intelligence was described in three cognitive levels, physics projection, mutual action control, and equi-librium adaptation. This will attract not only tech-nological but also scientific interest. The following research questions should be addressed in future:
1. When should the model be learned in the loop process?
2. How can incomplete models work for predic-tion?
3. How widely should the search be conducted? 4. How can the model and the search work
com-plementarily?
5. How can the physics projection loop be inte-grated with the mutual action control loop for high-order cognitive systems?
6. How can the stability of the coupling of the de-centralized double loop dynamics maintained?
To improve and refine this approach further, ma-chine learning technology, which is rapidly developing, must be incorporated, and recent scientific findings must be applied.
Acknowledgements
This work was partially supported by JST CREST (Grant number JPMJCR15E3, “Symbol Emergence in Robotics for Future Human-Machine Collabora-tion”), JSPS KAKENHI Grant Number 18K11359, and Grant-in-Aid for Scientific Research on Innova-tive Areas (16H06569).
References
[1] Martin Heidegger. Being and Time. 1927.
[2] Kenneth Craik. The nature of explanation. Cambridge University Press, 1963.
[3] Michael Polanyi. The tacit dimension. 1966.
[4] Terry Winograd. Understanding natural language.
Cog-nitive psychology, 3(1):1–191, 1972.
[5] James Jerome Gibson. The ecological approach to visual perception. 1979.
[6] Humberto Maturana and Francisco Varela. Autopoiesis and cognition: the realization of the living. Dordrecht:
Reidel, pages 2–62, 1980.
[7] David Marr. Vision: A computational investigation into the human representation and processing of visual infor-mation. mit press. Cambridge, Massachusetts, 1982. [8] Dan Sperber and Deirdre Wilson. Relevance:
Communi-cation and Cognition. Blackwell, Oxford, 1986,1995.
[9] Rodney A Brooks. Intelligence without representation.
Artificial intelligence, 47(1-3):139–159, 1991.
[10] John R. Searle. Mind: A Brief Introduction. Oxford Uni-versity Press, 2004.
[11] Elizabeth S Spelke and Katherine D Kinzler. Core knowl-edge. Developmental Science, 10(1):89–96, 2007. [12] Karl Friston. The free-energy principle: a unified brain
theory? Nature reviews neuroscience, 11(2):127, 2010. [13] Georg Northoff. The spontaneous brain: from the
mind-body to the world-brain problem. The MIT Press, 2018.
[14] Naoto Iwahashi, Masahide Negoro, and Soichi Kawano. Physics projection: Intelligence with physical world. In
Proc. Ann. Conf. Japanese Society for Artifitial Intelli-gence, 2019.
[15] Naoto Iwahashi. Language acquisition by robots.
Jour-nal of Artificial Intelligence Society of Japan, 18(1):49–58,
2003.
[16] Naoto Iwahashi. Equilibrium predictive control with mu-tual belief hierarchy for autonomous driving. In Proc. Int.
Conf. Awareness Sicence and Technology, 2019.