—
修士学位論文
—データを用いた多変数制御器の 直接設計に関する研究
A Study on Direct Design of Multivariable Controllers Using Input/Output Data
平成
23年度
三重大学大学院工学研究科 博士前期課程 電気電子工学専攻
寺田 真也
目 次
第
1章 緒言
11.1
研究背景と目的
. . . . 11.2
論文の構成
. . . . 4第
2章 準備
5 2.1表記
. . . . 52.2
伝達関数行列の入れ替え
[9] . . . . 52.3 NCbT . . . . 6
2.3.1
仮定
. . . . 62.3.2
問題設定
. . . . 72.3.3
評価関数の凸近似
. . . . 72.3.4 SISO
システムに対する
NCbT . . . . 82.3.5 MIMO
システムに対する
NCbT . . . . 11第
3章 安定性を考慮した多変数制御器設計法
15 3.1 MIMOシステムに対する安定性の凸制約
. . . . 153.1.1
小ゲイン定理に基づく安定条件
. . . . 153.1.2
スペクトル解析法による伝達関数行列の推定
. . . . 173.1.3
安定制約を付加した制御器設計法
. . . . 183.2
シミュレーション
. . . . 193.2.1
参照モデルの要求が過度な場合
. . . . 193.2.2
制御対象が非最小位相システムの場合
. . . . 243.3
実験
. . . . 273.3.1
制御対象
. . . . 273.3.2
実験条件
. . . . 273.3.3
実験結果
. . . . 28第
4章 非最小位相システムに対する制御器設計法
344.1
非最小位相システムに対する
NCbT . . . . 344.1.1
可変参照モデルの導入
. . . . 344.1.2
評価関数の準最適化
. . . . 354.1.3
非最小位相システムに対する設計アルゴリズム
. . . . 364.2
シミュレーション
. . . . 374.2.1
シミュレーション条件
. . . . 374.2.2
シミュレーション結果
. . . . 38第
5章 多変数非最小位相システムに対する制御器設計法
41 5.1多変数非最小位相システムに対する
NCbT . . . . 415.1.1 MIMO
システムにおける可変参照モデルの導入
. . . . 415.1.2
評価関数の準最適化
. . . . 425.1.3
多変数非最小位相システムに対する設計アルゴリズム
. . . . 445.2
シミュレーション
. . . . 445.2.1
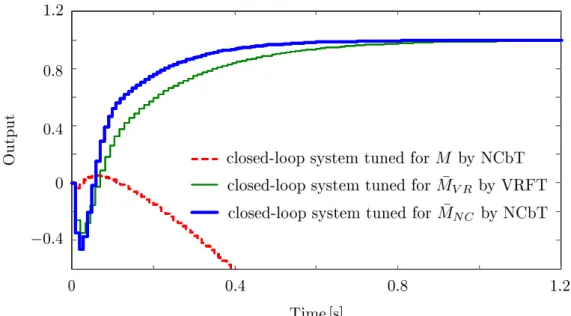
比較する制御器設計法
. . . . 445.2.2
シミュレーション条件
. . . . 455.2.3
シミュレーション結果
. . . . 46第
6章 結言
48参考文献
50謝辞
52論文目録
53第
1章 緒言
1.1
研究背景と目的
現在,広く用いられているモデルベース制御器設計法では,制御対象の数学モデル が必要となる。この数学モデルを得るために,多くのシステム同定手法が提案されて いる。システム同定は一般的に,(1) 制御対象の入出力データ取得,(2) モデル構造の 選定,(3) システム同定法の適用,(4) 同定モデルの妥当性の評価,という手順で行わ れる。産業システムに対する要求の高度化に伴い,産業プロセスや化学プラントなど の制御対象の動特性は複雑化しており,最適なモデル構造の選定は困難を伴う。この ような状況の下で,
(2)〜(4)のステップ,もしくはすべてのステップを繰り返し行わな ければならず,数学モデルを得ることは煩雑な作業が伴う可能性があると考えられる。
一方で,近年注目を集めているモデルフリー制御器設計法は,制御対象の入出力デー タから数学モデルを介さず制御器パラメータの同定を行う。そのため,システム同定
で生じる
(2)〜(4)のステップを必要とせず,煩雑な作業を行う必要がない。また,シ
ステム同定は入出力データに含まれる制御対象の情報を数学モデルにおける少数個の パラメータへ情報圧縮する手段と解釈できる。よって,入出力データから数学モデル を介さず制御器を設計することは,入出力データに含まれる制御対象の情報を圧縮す ることなく制御器の設計に利用できることを意味するため,数学モデルを介した場合 に比べ,高性能な制御器の設計が期待できる。さらに,モデルベース制御器設計法で は,制御対象として複雑で次数の高い数学モデルを用いた場合,モデル次数に依存し て設計される制御器の次数も高くなるため,制御器の低次数化といった作業が必要と なる。モデルフリー制御器設計法は,モデルベース制御器設計法では非凸な最適化問 題となる
PI制御器や
PID制御器などの構造が指定された制御器の設計問題も,入出力 データを用いて数値的に計算することで解くことができ,低次数制御器の設計が容易 である。以上のように,モデルフリー制御器設計法はモデルベース制御器設計法にお けるいくつかの問題点を回避できるため,代替手段として様々な手法が提案されてい
る
[1, 2, 3, 4, 5]。しかしながら,モデルフリー制御器設計法には大きな問題点が存在する。本研究では,以下の二つの大きな問題点に注目する。
第
1章 緒言
一つ目は,設計された制御器が実際に閉ループシステムを安定化する保証がないこ とである。モデルフリー制御器設計法の典型的な設計問題であるモデル参照制御問題 を例に挙げる。この問題では,望みの特性を与える参照モデルの応答と閉ループシス テムの応答の二乗誤差平均のみを評価しており,安定性に関する評価は行われていな い。そのため,参照モデルや制御器構造の選び方によっては閉ループシステムを安定 化できない可能性がある。本来,達成できる閉ループ特性は,制御対象によって制限 を受けるため,参照モデルは制御対象の動特性をもとに決定されるべきである。モデ ルベース制御器設計法では(不確かさを持つとはいえ)制御対象の数学モデルをもと に達成させたい参照モデルや制御器構造を選定できる。一方,モデルフリー制御器設 計法では制御対象の入出力データのみを利用し,その他の詳細な情報は利用できない 状況を想定しているため,不安定零点やむだ時間など制御対象の情報を反映した参照 モデルや,理想的な制御器構造の選定は困難である。また,システムの保全の観点か らも閉ループシステムの不安定化は望ましくない。そこで,少なくとも閉ループシス テムの安定性を保証するモデルフリー制御器設計法の開発が望まれている。
Heusden
らは,モデルフリー制御器設計法の一つである
Noniterative Correlation-based Tuning[5](以下,NCbT
と略する)に安定制約を課す手法を提案し
[6],実際
に実験装置へ適用して有効性を確認している
[7]。この手法を用いれば,一入力一出力 (Single-Input Single-Output以下,SISO と略す) システムであれば,制御対象の入出 力データのみを用いて閉ループシステムの安定性を保証する制御器パラメータの調整 が可能である。しかしながら,NCbT は制御器調整に要するデータ取得回数の低減を 目的として,制御器と制御対象の位置の入れ替えを利用しているため,多入力多出力
(Multi-Input Multi-Output以下,MIMO と略す) システムに対しては適用することが できない。一方,著者らはデータ取得回数は増加するものの,MIMO システムにも適 用可能な多変数
NCbTを提案してきた
[8]。本研究ではさらに,多変数NCbTに安定制 約を課した制御器設計法を提案する。また,提案手法の有効性を数値例および実機実 験を通して示す。
二つ目は,適切な参照モデルの選定が困難なことである。先に述べたように,モデ ルフリー制御器設計法では制御対象の詳細な情報は利用できない状況を想定している。
そのため,あらかじめ設定した参照モデルが実現可能かどうかは,設計された制御器
を実装してみなければわからない。この問題は,制御対象が非最小位相システムの場
合に深刻である。モデルフリー制御器設計法の多くは,設計問題としてモデル参照制
御問題を扱う。そのため,制御対象の不安定零点を持たない参照モデルが設定された
第
1章 緒言
場合,参照モデルと達成される閉ループシステムの位相のずれを低減するために,不 安定な極零相殺が生じるように制御器パラメータを調整しようとする。しかし,制御 器構造が固定されているため調整に無理が生じ,望みの閉ループ特性を実現できない,
もしくは,達成された閉ループシステムが不安定化してしまう可能性が高い。よって,
非最小位相システム
(不安定零点を持つ制御対象)に対して望みの制御性能を実現する ためには,制御対象の不安定零点を参照モデルに含ませなければならず,制御対象の 不安定零点に関する情報が必要不可欠である。そこで,制御対象の不安定零点を参照 モデルに反映させるモデルフリー制御器設計法が求められている。
Lecchini
らはモデルフリー制御器設計法の一つである
Iterative Feedback Tuning[1, 2](以下,IFT と略する)を非最小位相システムに適用可能な手法へ拡張した
[10]。この手法では,設計問題であるモデル参照制御問題に対し,参照モデルの零点をフリーパラ メータとすることで,制御対象の不安定零点が参照モデルに反映され,不安定な極零相 殺を回避できる。しかしながら,データ取得の際に用いる入力信号がステップ応答に限 られることや,IFT での調整では多数のデータ取得が必要であるなどの問題点がある。
これらの問題点を解決するために,Campestrini らは文献
[10]のアイディアをモデルフ リー制御器設計法の一つである
Virtual Reference Feedback Tuning[3](以下,VRFTと略する)へ拡張した
[11]。この手法は,一回のデータ取得で調整が可能であるなど,多くの
VRFTの特長を保持しており,文献
[10]に比べ設計者の負担が軽減された手法 である。しかしながら,
IFT,VRFTともに観測雑音に関する考慮がないため,観測雑 音が重畳した入出力データでは望みの制御性能を実現できない可能性がある。一方で,
Karimi
らは評価関数に相互相関関数を用いた
Noniterative Correlation-based Tuning(以下,NCbT と略する)を提案した
[5]。NCbTは,相互相関関数を導入することによ り,入出力データに含まれる観測雑音の影響を低減できる。さらに,一回のデータ取 得で調整が可能であるなど,VRFT に比べて多くの特長を有するモデルフリー制御器 設計法である。本研究では文献
[11]のアイディアを
NCbTへ拡張し,非最小位相シス テムに対して適用可能な
NCbTを提案する。また,文献
[10],[11]ともに一入力一出 力の非最小位相システムに対して提案された手法であり,多変数非最小位相システム に対して有効なモデルフリー制御器設計法は提案されていない。そこで,文献
[11]の アイディアを多変数
NCbTへ拡張し,多変数非最小位相システムに対して適用可能な
NCbTを提案する。提案手法の有効性を数値例を通して示す。
本研究では,評価関数に対して制約を課して制御器パラメータを導出することで閉
ループシステムの安定性を保証し,かつ,制御対象の不安定零点を参照モデルに反映
第
1章 緒言
させることで非最小位相システムに対して適用可能にし,より欠点の少ない
NCbTへ 拡張することを目的とする。
1.2
論文の構成
本論文の構成は以下の通りである。まず,第
2章で表記,そして文献
[9]で提案され ている
MIMOシステムに対する伝達関数行列の入れ替えについて述べ,拡張の対象と
なる
NCbT,多変数NCbTについて概説する。そして,第
3章で提案する安定性を考
慮したモデルフリー制御器設計法の考え方について説明する。さらに,提案手法を数
値例および実機実験において
2入力
2出力システムに対して適用し,安定制約を課さな
い場合には安定化できない対象でも安定制約を課すことで閉ループシステムを安定化
する制御器が設計できること検証する。第
4章では,文献
[11]のアイディアを
NCbTへ適用し,非最小位相システムに対しても適用可能なモデルフリー制御器設計法のア
ルゴリズムについて述べる。そして,数値例において,提案手法を文献
[11]の手法と
比較し,提案手法が観測雑音に対して低感度に制御器が設計できることを示す。第
5章
では,文献
[11]のアイディアを多変数
NCbTへ適用し,多変数非最小位相システムに
対しても適用可能なモデルフリー制御器設計法のアルゴリズムについて述べ,数値例
にて有効性を検証する。最後に,第
6章で本研究のまとめと今後の課題を述べる。
第
2章 準備
本章では準備として,文字の表記や多変数
NCbT[8]でポイントとなる伝達関数行列の 入れ替え
[9]について説明する。そして,拡張の対象となる
NCbT[5],多変数NCbT[8]について概説する。
2.1
表記
本研究を通して用いる表記を以下に示す。
zはシフトオペレータであり,t 番目の離散 時刻における離散時間信号
x(t)に対して
z−1x(t) = x(t−1)と表記する。以後,簡単の ため
t番目の離散時刻を時刻
tと表記する。
E[x(t)]は
x(t)の数学的期待値を表す。I は 単位行列を表し,特に,I
nは
n次の単位行列を表す。
aijを要素に持つ行列
A∈Rm×n,
B∈Rp×qに対して,クロネッカー積
A⊗Bを以下のように定義する。
A⊗B=
a11B . . . a1nB ... . .. ... am1B . . . amnB
∈R(m×p)×(n×q)
¯
σ{A}
は
Aの最大特異値を表す。
2.2
伝達関数行列の入れ替え
[9]伝達関数行列
P ∈ Rm×n,C
∈ Rn×mに対して,C
iを
Cの第
i列ベクトル,c
ijを
Cの
ij要素とする。また,s(t) を設計者が与える制御器調整用のスカラー信号とし,
r[i](t)
を第
i要素が
s(t)で,残りが
0の
m次列ベクトルとする。同様に,u
[k](t)を第
k要素が
s(t)で,残りが
0の
n次列ベクトルとする。このとき
(2.1)式が成り立つ。
P Cr[i](t) = P Cis(t) =
∑n k=1
ckiP u[k](t) (2.1)
P
,C をそれぞれ制御対象と制御器の伝達関数行列とすると,図
2.1のように
Cに入
力信号として
r[i](t)を与えた時の出力
y(t)は,図
2.2のように
Pと
Cの位置を列単
位ではあるが入れ替えて表現できることを意味している。
第
2章 準備
図
2.1: r[i](t)に対するP C の出力
図
2.2:図
2.1におけるy(t) の他の表現
2.3 NCbT
本節では,Karimi らが提案した
SISOシステムに対する制御器設計法
[5]及び,著者 らが提案した多変数制御器設計法
[8]の概要を示す。
2.3.1
仮定
制御対象
P(z)∈Rm×nは未知の安定な線形時不変離散時間システムであり,その出 力は
(2.2)式に従うとする。
y(t) =P(z)u(t) +v(t) (2.2)
ここで,
u(t)∈Rn,
y(t)∈Rmはそれぞれ制御対象の時刻
tにおける入出力であり,開 ループ実験を通して取得可能であるとする。出力
y(t)に作用する観測雑音
v(t)∈Rmは 平均
0の弱定常確率過程であり,その各要素は信号
s(t)とは無相関であると仮定する。
制御器
C(z, ρ) ∈ Rn×mは線形時不変離散時間システムであり,(2.3) 式に示すよう にパラメータ行列
ρ ∈ R(n×nρ)×mに対して線形にパラメトライズされる伝達関数行列 とする。
C(z, ρ) =βT(z)ρ (2.3)
ここで,
β(z)∈Rn×(n×nρ)は設計する制御器の構造に応じて定義される伝達関数行列で あり,n
ρは制御器の各要素
cijを記述するパラメータ数を表す。表記の簡単化のため,
以下ではシフトオペレータ
zを省略する。ただし,必要に応じて表記する。
u[lJ(t) 1 ..
u[nJ (t)
第
2章 準備
2.3.2
問題設定
制御対象
Pに対して,閉ループシステムの出力が,線形時不変な参照モデル
Mの 出力に追従するような,制御器
C(ρ)のパラメータ行列
ρを調整する問題を考える。こ の問題を
Mと閉ループシステムの差の
2ノルムを最小化する問題として定式化する。
その評価関数は周波数領域おいて
(2.4)式のように定義される。
JMR(ρ) =WMR[M −(I+P C(ρ))−1P C(ρ)]2
2 (2.4)
ここで,W
MRは設計者が任意に与える周波数重みである。(2.4) 式の最小化問題は制 御対象のモデル
Pを用いることができる場合,H
2制御問題として定式化でき,容易に
C(ρ)を求めることができる。しかし,本研究では制御対象のモデルは利用せず,制御 対象に関して得られる情報は
(2.2)式における制御入力
u(t)と観測雑音が重畳した出力
y(t)のみである。本研究ではこれらの入出力データのみを用いて
JMR(ρ)を近似的に最 小化する制御器パラメータ
ρを求める問題を扱う。なお,モデルマッチングを強調す る周波数帯域を適切に指定する重み
WMR用いることで制御性能を向上できる可能性 がある。しかし,モデルフリー制御器設計法では制御対象の詳細な情報を利用できな い状況を想定し,本研究では一般性を失うことなく,以下
WMR =Iとして考える。
2.3.3
評価関数の凸近似
JMR(ρ)
の最小化問題は
Parsevalの定理によれば,図
2.3において,v(t) = 0 のとき
∥εcl(ρ, t)∥22
を最小化する問題と漸近的に等価である。
εcl(ρ, t) = [
M −(I +P C(ρ))−1P C(ρ)] r(t)
−(I +P C(ρ))−1v(t) (2.5)
しかし,(2.5) 式は
C(ρ),すなわちρに対して非線形であり,
∥εcl(ρ, t)∥22を最小化す る
ρの求解には非線形最適化を必要とし,局所解に陥りやすい。
この問題を解決するため,(2.6) 式を満たす理想制御器
C∗を導入し,J
MR(ρ)を凸近 似する。
M = (I+P C∗)−1P C∗ (2.6)
最適化の結果,J
(ρ)の最小解
ρˆにより,近似
(I +P C(ˆρ))−1 ≃I −Mが成り立つと すると,(2.4) 式は
(2.7)式のように近似できる。
J(ρ) =∥W1[M −(I−M)P C(ρ)]∥22 (2.7)
第
2章 準備
図
2.3:モデル参照制御問題
図
2.4:モデル参照制御問題の近似
(2.4)
式から
(2.7)式への近似は閉ループ同定問題から開ループ同定問題への近似と解
釈できる。この近似はシステム同定の分野では良く見られ,モデルフリー制御器設計 法においても文献
[3],[8]を始めとして多くの文献で議論され,有効性が確認されてい る。なお,多変数
NCbTにおける近似による影響については文献
[8]を参照されたい。
J(ρ)
の最小化問題は,図
2.4において
v(t) = 0のとき
∥W1˜εcl(ρ, t)∥22を最小化する 問題と等価である。ここで,W
1は重み関数であり,後述のように選択することによ り
∥W1˜εcl(ρ, t)∥22を
JMR(ρ)の良い近似とすることができる。C(ρ) は
ρに関して線形 であるため,J(ρ) は
ρに関して凸となり,その最小解は最小二乗法により求めること ができる。しかし,図
2.4において,P への入力
u(ρ, t)は制御器
C(ρ)に依存するた め,異なる
ρに対して
˜εcl(ρ, t)を評価するためには再度入出力データを取得する必要 がある。
2.3.4 SISO
システムに対する
NCbTKarimi
らが提案した
NCbT[5]では,制御対象を
SISOシステムに限定し,図
2.4か
ら図
2.5のように制御器と制御対象の位置を入れ替える。この入れ替えにより制御対
象への入力は
r(t)に固定されるため,一回の入出力データの取得でパラメータの調整
第
2章 準備
図
2.5: SISOシステムに対する制御器と制御対象の入れ替え
が可能になる。このとき,ε(ρ, t) は
(2.8)式のように表される。
ε(ρ, t) = M r(r)−C(ρ)(1−M)y(t)
= [M −C(ρ)(1−M)P]r(t)−(1−M)C(ρ)v(t) (2.8)
観測雑音が重畳した入出力データを用いる場合,ε(ρ, t) は観測雑音
v(t)の影響を受け る。よって,ε(ρ, t) を用いて
ρの最小解を得る場合には,本来評価したい
J(ρ)の最小 解に対してバイアスが生じる。そこで,NCbT では
ε(ρ, t)と
r(t)の相互相関関数を考 え,その二乗和を評価関数とすることで,v(t) の影響を低減する。
SISO
システムの場合,制御器
C(ρ)はパラメータベクトル
ρ ∈Rnρに対して線形に パラメトライズされる。
C(ρ) =βT(z)ρ (2.9)
ここで,β(z) は設計する制御器の構造に応じて
(2.10)式のように定義される伝達関数 ベクトルである。
β(z) = [β1(z), β2(z),
…, β
nρ(z)]T (2.10) nρは,ρ のパラメータ数を表す。
このとき,ε(ρ, t) は
ρに対して線形に表現できる。
ε(ρ, t) = M r(t)−C(ρ)(1−M)y(t)
=yd(t)−ϕT(t)ρ (2.11)
ただし,y
d(t),ϕ(t)は以下のように定義される。
yd(t) = M r(t)
ϕ(t) = β(1−M)y(t)
第
2章 準備
有限のデータ長
Nに対して
ε(ρ, t)と
r(t)の相互相関関数
f(ρ)は次のように推定され る
[5]。fˆ(ρ) = 1 N
∑N t=1
ζwr(t)[yd(t)−ϕT(t)ρ] (2.12) ζwr(t)
は
(2.13)のように定義される
r(t)と相関をもち,v(t) と無相関な補助変数ベク トルである。
ζwr(t) = W[r(t+l),· · · , r(t),· · · , r(t−l)]T (2.13) W
は次のように選ばれる適切な重み関数である
[5]。W(e−jωk) = 1−M(e−jωk)
Φr(ωk) (2.14)
ここで,Φ
r(ωk)は
r(t)のパワースペクトル密度である。よって,NCbT の評価関数は
JC(ρ) = ˆfT(ρ) ˆf(ρ)となる。
fˆ(ρ)は
ρに対して線形であるため,J
C(ρ)は
ρに対し て凸となる。したがって,J
C(ρ)を最小とする制御器パラメータは最小二乗法により
(2.15)
式のように求められる。
ρˆ= arg min
ρ JC(ρ) = (QTQ)−1QTZ (2.15)
ただし,Q,Z は以下のように定義される。
Q= 1 N
∑N t=1
ζwr(t)ϕT(t)
, Z
= 1 N∑N t=1
ζwr(t)yd(t)
NCbT
では,開ループ実験から取得された入出力データだけでなく,閉ループ実験 から取得された入出力データを用いても制御器パラメータの調整が可能である。図
2.5に対して,制御対象
Pを安定化制御器
Csと
Pから構成される閉ループシステムに置き 換えた図
2.6を考える。このとき,P の入出力データ
u(t),y(t)から生成される
ε(ρ, t)¯は
(2.16)式のように表現できる。
¯
ε(ρ, t) = M u(t)−C(ρ)(1−M)y(t)
= Cs
1 +P Cs[M −C(ρ)(1−M)P]r(t)
− 1
1 +P Cs[M Cs+C(ρ)(1−M)]v(t) (2.16) (2.16)
式において,r(t) に関する項は
Cs/(1 +P Cs)がなければ,評価したい伝達関数
と一致している。よって,2.3.4 項で述べた設計アルゴリズムに対し,適切に重み関数
第
2章 準備
図
2.6:閉ループデータを用いたモデル参照制御問題の近似
W
を選び,ε(ρ, t) を
ε(ρ, t)¯に置き換えて考えることで,閉ループ実験から取得した入 出力データからも同様に,制御器パラメータの調整が可能となる。このとき,重み関 数
W¯は次のように選ばれる
[5]。W¯(e−jωk) = 1−M(e−jωk)
Φur(ωk) (2.17)
ただし,Φ
ur(ωk)は
u(t)と
r(t)のパワークロススペクトル密度である。
2.3.5 MIMO
システムに対する
NCbTKarimi
らが提案した
NCbT[5]は,P を
SISOシステムに限定することで,C(ρ) と
Pの位置の入れ替えを行っていた。しかし,MIMO システムにおいては
C(ρ)と
Pは 伝達関数行列となるため単純に入れ替えることはできない。
MIMO
システムにおいてパラメータ調整に要するデータ取得回数を低減するために,
2.2
節で述べた方法を用いて,P と
C(ρ)の位置を入れ替える。まず,図
2.4における
r(t)として
r[i](t)を与えたときの
˜εcl(ρ, t)を
ε˜[i]cl(ρ, t)とすると
(2.18)式を得る。この とき
ε˜[i]cl(ρ, t)の
r[i](t)に関する項は
J(ρ)で評価したい伝達関数と一致していることが わかる。
˜
ε[i]cl(ρ, t) = M r[i](t)−(I −M)(P C(ρ)r[i](t) +v(t))
= [M −(I −M)P C(ρ)]r[i](t)−(I −M)v(t) (2.18)
次に,図
2.7のように定義される
ε[i](ρ, t)を考える。ε
[i](ρ, t)は
(2.19)式のように表
すことができ,r
[i](t)に関する項は
˜ε[i]cl(ρ, t)と同様に
J(ρ)で評価したい伝達関数と一
第
2章 準備
図
2.7:図
2.4に対する制御器と制御対象の入れ替え 致している。
ε[i](ρ, t) = M r[i](t)−
∑n k=1
cki(ρ)(I−M)yk(t)
= [M −(I −M)P C(ρ)]r[i](t)−
∑n k=1
cki(ρ)(I−M)vk(t) (2.19)
ここで,y
k(t) = P u[k](t) + vk(t) (k = 1,· · · , n)は
(2.2)式に従い
u[k](t)に対して それぞれ独立に取得された出力である。(2.19) 式より,n 回の開ループ実験を行い,
yk(t) (k = 1,· · · , n)
を取得することで
ε[i](ρ, t)をオフラインで評価でき,異なる
ρに対する
ε[i](ρ, t)の評価に際して
(2.18)式のように入出力データを再び取得する必要 がない。
(2.18)
式と
(2.19)式は
v(t)及び
vk(t)に関する項がなければ等しいことは明らかで
あり,これらの観測雑音が存在しなければ最適な
ρは
∥W1˜ε[i](ρ, t)∥22を最小化する
ρとして求めることができる。しかし,
vk(t)が存在する場合,
∥W1˜ε[i](ρ, t)∥22と
J(ρ)の
最小解は一致しない。そこで,v
k(t)の影響を低減できる相関関数に基づいた評価関数
を導入し,その二乗和を評価関数とする。
第
2章 準備
ρ
の第
i列ベクトルを
ρiとすると,ε
[i](ρ, t)は
(2.20)式のように表現できる。
ε[i](ρ, t) = M r[i](t)−
∑n k=1
cki(ρ)(I −M)yk(t)
= M r[i](t)−ΦT(t)ρi (2.20)
ここで,Φ(t),Y
(t)は以下のように定義される。
Φ(t) = β((I−M)Y(t))T Y(t) = [y1(t),· · ·,yn(t)]
このとき,有限のデータ長
Nに対して
ε[i](ρ, t)と
r[i](t)の相互相関関数
f[i](ρ)は次の ように推定される
[8]。fˆ[i](ρ) = 1 N
∑N t=1
ζw(t)⊗W1{M r[i](t)−ΦT(t)ρi}
ζw(t)
は,(2.21) 式のように定義される
r[i](t)と相関をもち,v
k(t)と無相関な補助変数 ベクトルである。
ζw(t) =W2[s(t+l),· · · , s(t),· · · , s(t−l)]T (2.21) l
は十分に大きな整数であり,W
1 ∈Rm×m,W
2は以下のように選ぶ重み関数である。
W1 =I−M
,
W2 = Φ−s1(ωk)ここで,Φ
s(ωk)は
s(t)のパワースペクトル密度である。
(2.7)
式を最小にする制御器パラメータを求める問題は
(2.22)式となる。
ˆ
ρ= arg min
ρ Jc(ρ) (2.22)
ただし,評価関数
Jc(ρ)は
(2.23)式のように
f[i](ρ)の二乗和で与えられる。
Jc(ρ) =
∑m i=1
(fˆ[i](ρ) )T
fˆ[i](ρ) (2.23)
fˆ[i](ρ)
は
ρiに関して線形である。また,各
ρiを求める問題はたがいに独立であるため
Jc(ρ)は
ρに対して凸となる。よって,最適な制御器パラメータ
ρˆは最小二乗法により
(2.24)
式のように求めることができる。
ˆ
ρ= arg min
ρ Jc(ρ) = (ΩTΩ)−1ΩTΨ (2.24)
第
2章 準備
ただし,Ψ
= [Ψ[1],· · · ,Ψ[m]]であり,Ψ
[i],Ω は以下のように定義される。
Ψ[i] = 1 N
∑N t=1
ζw(t)⊗W1M r[i](t)
Ω = 1 N
∑N t=1
ζw(t)⊗W1ΦT(t)
時間領域における評価関数
Jc(ρ)は
Parsevalの定理により
J(ρ)に漸近的に等価,すな わち
(2.25)式が成り立つ。
lim
l,N→∞,l/N→0Jc(ρ) = J(ρ) (2.25)
なお,多変数
NCbTでは,(2.1) 式の関係を利用することで制御対象と制御器の順序
の入れ替えを可能にしている。開ループ実験にてデータ取得を行う場合,P の入力を
u[k](t)とすることは容易である。しかしながら,閉ループ実験にてデータ取得を行う
場合には
Pの入力を意図的に
u[k](t)とするのは難しい。よって,閉ループデータに対
して多変数
NCbTを適用することは現在のところ困難であることに注意されたい。
第
3章 安定性を考慮した多変数制御器 設計法
本章では,2.3.5 項で述べた制御器設計法の評価関数に対して,小ゲイン定理に基づ く閉ループシステムの安定性に関する制約を課すことで,安定性を考慮した制御器パ ラメータの調整が可能であることを示す。さらに,提案手法を数値例及び,実機実験 において,2 入力
2出力システムである制御対象に対して適用し有効性を示す。
3.1 MIMO
システムに対する安定性の凸制約
ロバスト制御などのモデルベース制御器設計法では,実際の制御対象とその数式モ デルとの差を不確かさとして扱い,制御器設計に陽に利用することで,実際の制御対 象を安定化する制御器の設計を可能にしている。それに対し,多くのモデルフリー制 御器設計法では得られた制御器が実際に制御対象を安定化するかどうかは制御器を実 装してみなければわからない。そこで,モデルフリー制御器設計法において安定性を 考慮するために,入出力データのみを利用した安定性に関する拘束条件を導出する。
3.1.1
小ゲイン定理に基づく安定条件
まず,設計された制御器
C(ˆρ)と実際の制御対象
Pから構成される閉ループシステ
ムの安定条件について考える。このとき,P と
C(ρ)から構成される閉ループシステ
ムは理想制御器
C∗を用いて,図
3.1のように表現できる。C(ρ)
−C∗を制御器の変動
と見れば,加法的変動に対するロバスト安定化問題とみなせる。よって,
zから
zまで
の一巡伝達関数を
G(ρ)とし,その
H∞ノルムを
δ(ρ)とすると,閉ループシステムが
安定であるための十分条件は小ゲイン定理により
G(ρ)が安定ならば,δ(ρ)
< 1とな
第
3章 安定性を考慮した多変数制御器設計法
図
3.1:理想制御器を用いた閉ループシステムの表現
る。この十分条件は
(2.6)式を用いて
(3.1)式のように表現できる。
δ(ρ) = ∥G(ρ)∥∞
= (I+P C∗)−1P(C∗−C(ρ))
∞
= ∥M −(I −M)P C(ρ)∥∞ <1 (3.1)
ここで,(3.1) 式は制御対象のモデル
Pを含むことに注目されたい。モデルフリー制 御器設計法では
Pを利用できないため,利用可能な制御対象の入出力データから
(3.1)式を評価する必要がある。そこで,制御対象の入出力データをもとに
G(ρ)を推定する 方法について考える。
vk(t) = 0
のとき,(2.19) 式は
(3.2)式のように表せる。
ε[i](ρ, t) = [M −(I−M)P C(ρ)]r[i](t) (3.2)
よって,G(ρ) は制御器設計の際に取得した
ε[i](ρ, t),r[i](t)を用いて推定できること がわかる。しかし,本研究で用いる閉ループシステムの安定条件
(3.1)式は十分条件で あるため,保守的な設計となる場合がある。以下,この保守性と多変数
NCbTにおけ る制御器設計の関係について考える。
(2.7)
式と
(3.1)式は
(2.6)式を用いて次のように変形できる。
J(ρ) = ∥W1(I−M)P(C∗−C(ρ))∥22 (3.3) δ(ρ) = ∥(I −M)P(C∗−C(ρ))∥∞<1 (3.4)
上式より,J(ρ) の最小化問題は
C∗−C(ρ)の重み付き最小化問題として捉えることが でき,C(ρ) と
C∗との差は指定された制御器構造の範囲内で小さくなるように調整さ
C(ρ)
のい)
+υ(p