MICROSAR
プロダクトインフォメーション
MICROSAR
目 次
1 MICROSAR ... 3
2 MICROSAR.OS ... 8
3 MICROSAR.COM ... 10
4 MICROSAR.CAN ... 13
5 MICROSAR.FR ... 17
6 MICROSAR.LIN ... 20
7 MICROSAR.ETH ... 23
8 MICROSAR.IPC ... 28
9 MICROSAR.CHARGE ... 32
10 MICROSAR.AVB ... 35
11 MICROSAR.MEM ... 38
12 MICROSAR.SYS ... 41
13 MICROSAR.DIAG ... 45
14 MICROSAR.MCAL ... 50
15 MICROSAR.EXT ... 54
16 MICROSAR.IO ... 57
17 MICROSAR.RTE ... 59
18 MICROSAR.AMD ... 62
19 MICROSARソリューション ... 66
20 MICROSAR Safe ... 67
21 MICROSAR Security ... 70
22 MICROSAR HSM ... 73
23 MICROSAR Gateway ... 78
24 MICROSAR Multi-Core ... 82
25 MICROSAR Variant Handling ... 84
26 MICROSAR J1939 ... 87
27 MICROSAR vVIRTUALtarget ... 90
28 MICROSAR POSIX ... 94
29 MICROSAR OTA ... 97
30 MICROSAR.SIPとMICROSAR.EIP ... 99
31 AUTOSAR Evaluation Bundle ... 102
32 その他の情報 ... 104
V2.17.01 11/2021
発行元:ベクター・ジャパン株式会社 www.vector.com/jp/ja/
※記述されている内容は予告なく変更されることがあります。(発行日:2022年 2 月 3日)
MICROSAR
1 MICROSAR
ベクターのAUTOSAR ECUソフトウェア用ソリューション
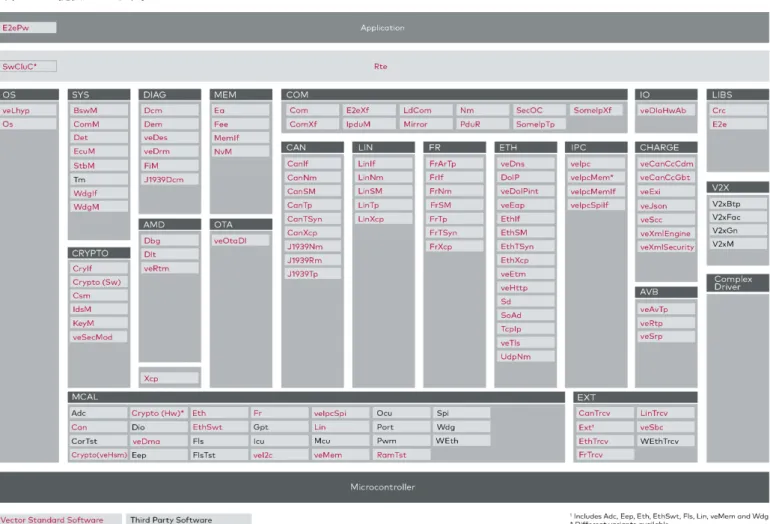
MICROSARは、ECUソフトウェア用のAUTOSARソリューションです。MICROSARは、MICROSAR.RTEおよびMICROSARベーシックソ フトウェア(BSW)モジュールで構成されており、AUTOSAR仕様のあらゆる面をカバーし、多くの拡張機能およびアドオンを備えています。
AUTOSAR BSWモジュールにはそれぞれ、MICROSARパッケージが1つずつ割り当てられています。詳しくは、各モジュールの説明を参照し てください。ベクターでは、個々のSoftware Integration Package(MICROSAR.SIPとMICROSAR.EIP)に必要なBSWモジュールを組み 合わせてご提供しています。
図 1: AUTOSAR仕様の全モジュールが含まれているMICROSARパッケージ(AUTOSAR 4.3)
MICROSARクラスターは、BSWモジュールが含まれた以下のパッケージから構成されています。
クラスター 内容
MICROSAR.AMD アプリケーションとMICROSAR BSWのモニターおよびデバッグ MICROSAR.AVB Ethernet経由のオーディオ/ビデオ用のBSWモジュール MICROSAR.CAN CAN通信用AUTOSAR BSWモジュール
MICROSAR.CHARGE 外部インフラとの通信用BSWモジュール MICROSAR.CYPTO (「MICROSAR Security」の章を参照)
MICROSAR.COM ネットワークに依存しない通信およびゲートウェイ用AUTOSAR BSWモジュール MICROSAR.DIAG 診断用AUTOSAR BSWモジュール
MICROSAR.ETH Ethernet通信用AUTOSAR BSWモジュール
MICROSAR
クラスター 内容
MICROSAR.IO マイクロコントローラーの周辺機能とそのアプリケーション間のインターフェイス
MICROSAR.IPC プロセッサ間通信AUTOSAR BSWモジュール MICROSAR.LIBS AUTOSARライブラリ
MICROSAR.LIN LIN通信AUTOSAR BSWモジュール
MICROSAR.MCAL マイクロコントローラーの周辺機能制御用AUTOSARドライバー MICROSAR.MEM 不揮発性メモリ管理用AUTOSAR BSWモジュール
MICROSAR.OS AUTOSAR仕様に対応したリアルタイムオペレーティングシステム
MICROSAR.RTE AUTOSAR仕様に対応したソフトウェアコンポーネント(SWC)用に最適なランタイム環境 MICROSAR.SYS AUTOSAR ECU用のシステム関連のBSWモジュール
MICROSAR.XCP XCP(Ethernet、FlexRay、CANのトランスポートレイヤー含む)を使用したAUTOSAR ECUの測定と適合
さらに、MICROSARは多様な問題を解決するための下記のソリューションを提供することが可能です。
ソリューション 内容
MICROSAR Gateway MICROSAR Gatewayは、さまざまな種類の車両ネットワークバス間のECUを接続します。このゲートウェイは機能面と設定面の両方に 柔軟性と拡張性を与えると同時に、スループット、レイテンシ、リソーセスなどのバランスを取りながらパフォーマンスを確保します。
MICROSAR HSM MICROSASR HSMは、暗号アルゴリズムの効率的な処理および高速化と、セキュアブートやSecure OnBoard Communication (SecOC) などを目的とした鍵管理を可能にします。
MICROSAR J1939 MICROSAR J1939は広く使用されている通信プロトコルのJ1939に基づいています。J1939では、商用車および発電機での通信には CANが使用され、農業、船舶、建設、林業などの分野の機械にはそれから派生した標準規格が使用されます。
MICROSAR Multi-Core MICROSAR Multi-Coreは各コア上にBSWサービスを適切に配置することで実行時間を最適化することを目指します。利用可能な演算 能力の拡大と、安全性に重大な影響を及ぼすアプリケーションのパーティショニングを可能にします。
また、BSWの配置と実行時間評価のプロセスを支援するツールも提供可能です。
MICROSAR OTA MICROSAR OTA (Over the Air) には、車両のソフトウェアの更新を処理、保存、アクティブ化するためのBSWモジュールが含まれて います。
MICROSAR POSIX MICROSAR POSIXは、POSIXオペレーティングシステム上でAUTOSAR BSWを実行するためのソリューションです。
診断やプロセッサ間通信などの標準的な機能や、既存のアプリケーションコードをPOSIXベースのプロジェクトに移植導入できます。
MICROSAR Safe MICROSAR Safeは、AUTOSAR ECUでISO 26262(機能安全)に準拠したMICROSAR BSWを提供することが可能です。
MICROSAR Security MICROSAR Securityは効果的かつ効率的な自動車サイバーセキュリティを提供し、組み込みソフトウェアをサイバー攻撃から守ります。
MICROSAR Variant Handling
MICROSAR Variant Handlingを使用すると、1つのECUに複数のコンフィギュレーションを格納し、複数のコンフィギュレーションを切り 替えることが可能になります。ルーティングテーブルや転送モードといったBSW設定のパラメーターを再コンパイルなしで変更できることか ら、ECUのビルド環境も、新しいECUバリアントもサプライヤーから入手することが不要となります。
MICROSAR vVIRTUALtarget MICROSAR vVIRTUALtargetはPC上でのシミュレーション環境です。ターゲットハードウェアなしでも仮想のECUを統合してテストで き、開発プロセス全体を通してインタラクティブな自動テストをサポートします。
1.1 適用分野
MICROSAR パッケージに含まれる BSW モジュールは、ECU の基本機能を提供しています。モジュールには、機能ソフトウェアに必要な AUTOSAR の標準サービスが実装されています。AUTOSAR アーキテクチャはハードウェアを抽象化する役割を担っており、ユーザーは機能ソ フトウェアプラットフォームを自由に開発することができます。
MICROSAR.OSやMICROSAR.MCALパッケージに含まれるモジュールはハードウェア依存型です。ベクターでは、さまざまなハードウェアプラ ットフォームおよびコンパイラ用のモジュールを提供しているので、ECUの置換などもスピーディに実施できます。MICROSAR.OSオペレーティン グシステムは、シングルコアにもマルチコアプロセッサにも利用できます。自動車メーカーとの長年にわたる協力の下、ベクターは診断モジュール をはじめとする自動車メーカー固有の多彩なBSWモジュールや拡張機能を提供しています。
必要なMICROSAR BSW モジュールはいずれもお客様のプロジェクト要件に基づいて設定でき、作成後にはそれらのモジュールを機能ソフトウ ェアに統合することができます。このようにしてECUソフトウェア一式が完成します。機能ソフトウェアがAUTOSARに準拠したSWCで構成され ている場合は、ランタイム環境(RTE)が必要になります。MICROSAR.RTEは、SWC間の通信や、BSWモジュールのデータやサービスへのア クセスを取り扱います。また、MICROSAR.RTE はイベントおよび情報フロー全体の制御に加え、情報交換の整合性を保証し、コア間またはメモリ 保護領域のアクセス制御も行います。
MICROSAR
SWCによるアーキテクチャを持たない、すなわちRTEもないECUプロジェクトは、ベクターのveBre (Basic Runtime Environment) によりオ プションでサポートされます。veBreは設定可能なBSW のスケジュール機能、クリティカルセクションの管理機能、通常はRTEが行う、サービス レイヤーのBSWモジュールの型定義の作成などを通じて統合を容易にします。そのため、RTEを使用していないAUTOSAR 4ベースのプロジ ェクトの設定作業をより短時間で、効率的に行えるようになります。
1.2 特長
MICROSAR BSWモジュールの開発は、SPICEをベースとするベクターの標準モジュール開発プロセスで行われています。MICROSARパッケ ージはいずれも以下の機能を提供しています。
> 優れたメモリ利用効率、短い実行時間
> 量産車に使用可能
> AUTOSAR 4.xおよび3.xに対応
> ツールによるリアルタイムチェックにより一貫性のあるBSWの設定を支援
> お客様独自のアプリケーションに合わせた高い拡張性と対応性
> お客様の開発プロセスに最適な形で統合
> ECUのテストおよび解析のためのAUTOSARモニター
> Configuration Variantはユーザーが選択可能(Precompile、Link-Time、Post-Build Time)
> マルチプルECUをサポート
> ソースコードでの提供(オプション)
> MICROSAR Safeソリューションの利用によるISO 26262への対応
1.3 量産車での使用
MICROSAR BSWモジュールはすでに量産プロジェクトで利用されています。MICROSARには、標準組み込みソフトウェア実装に関するベクタ ーの長年にわたる経験が生かされています。MICROSAR ソフトウェアモジュールに対しては、すべて納品前に、お客様アプリケーション固有の条 件(ハードウェアプラットフォーム、コンパイラ、プロセッサデバイス、自動車メーカー、RTE の有無など)に合わせて体系的な統合テストを実施して います。必要に応じて、テスト対象をサードパーティ製のソフトウェアモジュール(MCALドライバーなど)にまで広げることも可能です。
1.4 AUTOSAR 4.xおよび3.xに対応
AUTOSAR 4.xと3.xのどちらを使用するかに関わらず、お客様はベクターを利用することにより、BSW全体を1つの供給元から調達できます。
プロジェクトを移行する際は、AUTOSAR 4.xと3.xに共通する以下のような開発ワークフローを利用できます。
> 設定ツールのDaVinci DeveloperとDaVinci Configurator Proは両方のリリースに対応しているため、ツールを切り替える必要はあり
ません
> 異なるAUTOSARリリースのMCALドライバーを、MICROSARに組み込むことができます
AUTOSAR 3から4に移行する場合、ベクターはお客様がAUTOSAR 4.x規格で変更されたインターフェイスに合わせてアプリケーションソフト ウェアを修正する際のサポートを行います。
MICROSARには他にも、AUTOSAR 4.xで規定されている機能が、AUTOSAR 3.x用BSWモジュールの拡張機能の形で多数用意されてい るという強みがあります。たとえばマルチコアオペレーティングシステムのほか、J1939、XCP、Ethernet/IPなどもすでにAUTOSAR 3.xでサポ ート可能となっています。MICROSAR.MOST バンドルはベクターがこの規格の追加として提供しているもので、AUTOSAR 4.x および AUTOSAR 3.xと互換性があります。
1.5 一貫性のあるシンプルな設定
AUTOSARでは、ECUソフトウェア基本機能の開発や適合を手作業ではなく、BSWモジュールの設定で行うことになっています。この設定作業 では、直観的で使いやすいベクターのDaVinciツールが役に立つだけでなく、これを使用することで1つのプロジェクトで複数ユーザーが並行作 業できるようになるため、プロジェクトがスピードアップします。DaVinciツールには入力ファイル(ECU Extract of System Description)が必要 ですが、一般に使用されているDBC、FIBEX、LDFなどのネットワーク記述をベースにして設定を作成することも可能です。
MICROSAR
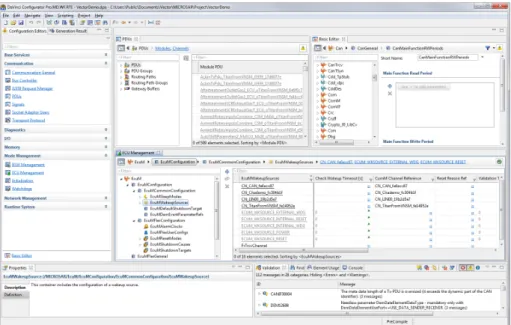
DaVinciツールはRTEとBSWモジュールの最適な設定を支援します。たとえばボトムアップ方式のプロセスでは、BSWコンフィギュレーション に適合するSWC のサービスポート(ランナブルを含む)が自動的に生成されます。このような自動処理により、頻繁に発生し、手作業では間違い やすい作業避けることができ、時間とコストを節約できます。ベクターのDaVinciツールについての詳細は、ベクターまでお問い合わせください。
図 2: DaVinci Configurator ProでBSWモジュールとRTEを設定
図 3: DaVinci Developerで機能ソフトウェア(SWCs)を定義
1.6 スケーラビリティ
MICROSAR BSWモジュールはAUTOSAR 要件を満たすだけでなく、数多くの機能拡張も提供します。高度な設定オプションによって、不要な 機能を無効にし、アプリケーションに合わせてMICROSARコードを最適化することができます。このような拡張性があるMICROSARモジュール は、小規模のアプリケーションにも複雑なアプリケーションにも最適なソリューションだと言えます。MICROSARはすでに、ステアリング角センサー やドアECU、エンジンECU、セントラルゲートウェイといったさまざまなECUで実装されています。また、MICROSARはLinuxやQNXなどの ほかのオペレーティングシステムで使用することも可能です。
1.7 ユーザーが選択できるBSW設定範囲
それぞれのMICROSAR BSWモジュールの設定範囲(Precompile、Link-Time、Post-Build)は自由に選択できます。
MICROSAR
1.8 製品に含まれるもの
以下のものが製品に同梱されています。
> ソフトウェアモジュール
> コマンドラインベースのジェネレーター(Windows XP/Windows 7用)
> BSWモジュールディスクリプション
> マニュアル類
それぞれのソフトウェアモジュールについては後述いたします。設定には、快適に操作できるDaVinci Configurator Proのご利用を推奨します。
詳しくは、ベクターまでお問い合わせください。
1.9 ソースコードの提供
一部に例外はありますが、MICROSAR モジュールはいずれもソースコードで提供されます。ソースコードで提供されている場合は、コンパイル前 に最適化を行って、テストを簡素化することができます。
1.10 ライセンスおよび保守
ベクターは、お客様のそれぞれの要件に合わせてカスタマイズした柔軟なライセンスを提供します。お客様は保守契約の一環としてソフトウェアの 更新を受け、最新のソフトウェアを維持することができます。
1.11 その他のサービス
> システム設計に関するコンサルティング
> お客様の要件に合わせたMICROSAR BSWモジュールの拡張と、お客様固有のSWCの開発
> 既存の機能ソフトウェアの適合作業のサポート
> ECUへのソフトウェア統合(サードパーティ製ソフトウェアを含む)
> 既存ソフトウェアのAUTOSARベースコンセプトへの移行
> 組み込みソフトウェアとAUTOSARに関するホットラインサポート、トレーニングコース
1.12 ベクターのAUTOSARソリューション
ベクターのAUTOSARソリューションは、DaVinciツール、MICROSAR BSW、MICROSAR.RTEから構成されています。MICROSARパッケ ージに含まれるBSWモジュールの一般的な特性については、以下の章で説明します。各DaVinciツールの機能的な特徴については、それぞれ のプロダクトインフォメーションをご覧ください。
1.13 お問い合わせおよびトレーニング
MICROSAR BSWモジュールは、一般的に広く使用されている各種マイクロコントローラーや、自動車メーカー固有のバリアントでも使用できます。
詳 し い 情 報 は 、 ベ ク タ ー ([email protected]) ま で お 問 い 合 わ せ く だ さ い 。 お 問 い 合 わ せ 先 に つ い て は www.vector.com/jp/ja/company/contacts/をご覧ください。
ベクターでは、AUTOSARに関するトレーニングを開催しております。また、規模やご要望に応じて、お客様ご指定の場所でのオンサイトトレーニン グ も 実 施 し て お り ま す 。 ベ ク タ ー の ト レ ー ニ ン グ に つ い て の 詳 細 は 、Web サ イ ト に て ご 覧 く だ さ い (https://vector- academy.com/vj_training_jp.html)。
MICROSAR.OS
2 MICROSAR.OS
AUTOSARに基づくベクター製オペレーティングシステム
MICROSAR.OS は、マイコン上での利用を目的として設計された、プリエンプティブなリアルタイムマルチタスクオペレーティングシステムです。各 種マイコン用 OS およびドライバーの開発におけるベクターの長年の経験を生かし、コンパクトで堅牢な OS カーネルを実現しました。Lean Hypervisor (veLhyp) は、マルチコアプロセッサが持つ複数のオペレーティングシステムパーティションまたはSoC の安全な起動をサポートし、
システムMPUを初期化します。
図 4: AUTOSAR 4.3対応のMICROSAR.OSモジュール 2.1 主な特長
> 小型かつ高速でリソース効率に優れ、起動時間も短いオペレーティングシステム
> 設定が簡単に行えるグラフィカルな設定ツール
> 16bit、32bit、64bitの多数のマイコンとマルチコアプロセッサで使用可能(AUTOSAR 4.xおよび3.x)
> 複数のオペレーティングシステムパーティションの安全な起動
> ISO 26262/ASIL Dに準拠した実装
> マスターコアを自由に選択可能
2.2 適用分野
MICROSAR.OSは、実績あるOSEK/VDX-OSオペレーティングシステム標準を拡張したAUTOSAR OS仕様をベースに、ベクターが時間監 視やメモリ保護などの機能を加えて強化したオペレーティングシステムです。ベクターのMICROSAR.OSは、AUTOSAR OS仕様に完全に準拠 しており、すべてのスケーラビリティクラスに対応が可能です。実装されているHigh Resolution Timerメカニズムを利用することで、割込み負荷 を上げることなく1msよりも短い時間分解能が可能になります。コントローラーによっては、分解能をマイクロ秒単位にまで引き上げることができま す。パーティションはシステム MPU によって保護されているため、さまざまなパーティションをメモリアクセスの干渉を起こさずに動作させることが できます。そのため、異なるASILを持つパーティションを並行して実行することも可能です。
MICROSAR.OS
2.3 モジュールおよびアドオン
> Os
オペレーティングシステムスケーラビリティクラス1 (SC1):OSEK/VDX-OS標準に対応して実装され、さらにスケジュールテーブルが追加 された、リアルタイムオペレーティングシステム
オペレーティングシステムスケーラビリティクラス2 (SC2):アプリケーションの実行時間と割込み時間を測定することにより、個々のタスクお よび割込みサービスルーチンの時刻同期および時間動作のモニターを行う、リアルタイムオペレーティングシステム。時間保護により、初期設 計段階で想定された実行時間の上限を超過しないことを保証することができます。そのため、あるアプリケーションセクションに不具合が生じ ても、他の実行中のプロセスにおける実行時間には影響しません。測定したデータは、将来のアプリケーションを設計して統合する際に、実 際の測定値として活用することができます。
オペレーティングシステムスケーラビリティクラス3 (SC3):マイコンのハードウェア機能を利用したメモリ保護機能を持つ、リアルタイムオペレ ーティングシステム。メモリ領域を保護することにより、他のアプリケーションのデータを破壊することなく、より簡単、確実にアプリケーションを 統合することができます。
オペレーティングシステムスケーラビリティクラス4 (SC4):SC2とSC3を組み合わせた内容 アドオン
> Multi-Core (symmetric):Multi-Core (symmetric) アドオンは、同じコマンドセットを持ち、単一のプログラムを複数のコアで処理可能 なマルチコアシステムをAUTOSAR仕様に準拠して開発する際に使用されます。これはAUTOSAR仕様4.xに基づいていますが、
AUTOSAR 3.xのプロジェクトでも使用できます。すべてのOS(SC1からSC4まで)に対応しています
> Multi-Core (asymmetric):Multi-Core (asymmetric) アドオンは、異なるコマンドセットを持つため、それぞれのコアで決められた処 理を行うマルチコアシステムをAUTOSAR仕様に準拠して開発する際に使用されます。これはAUTOSAR仕様4.xに基づいています が、AUTOSAR 3.xのプロジェクトでも使用できます。すべてのOS(SC1からSC4まで)に対応しています
> veLhyp – Lean Hypervisor
veLhypモジュール(Lean Hypervisor)は、ISO 26262 ASIL Dに準拠した、Safety Element out of Context (SEooC) として開発さ れています。システム起動時にシステムMPUをプログラムし、オペレーティングシステムパーティションを始動した後は、CPUリソーセスを 使用しません。
マルチコアアプリケーションでは、veLhypが起動時にシステムメモリ保護ユニット(MPU)を初期化し、コアの起動を管理します。各コアは、
POSIX、AUTOSAR Classic、AUTOSAR Adaptiveの各オペレーティングシステムを任意に組み合わせた、独自のオペレーティングシス テムイメージを持つことができます。マスターコアは自由に選択可能です。リセット後にハードウェアがASIL互換のカーネルをブートしない場 合、保護機能の初期化をASIL互換の他のカーネルに割り当てることができます。
veLhypによってパーティションの独立性が保証されます。各パーティションはローカルメモリの保護にのみ対処すれば済みます。また、パー ティションは初期化のために同期をとった待ち状態を実装する必要がありません。このような実装が減ることで、個別のパーティションの開発 が容易になります。
2.4 High Resolution Timer (HRT)
AUTOSAR オペレーティングシステムは通常、周期タイマー(PIT)を使用してシステムタイムを生成します。そして、システムカウンターのトリガー に使用される周期時間によって時間分解能が決定されます。トリガーはそれぞれが割込みに相当します。インテグレーションエンジニアは一般に、
割込み負荷と時間分解能の間の妥協点を探さなければなりません。アプリケーションによっては、許容できる妥協点よりも高い時間分解能が必要 になるケースもあります。
2.5 設定および生成ツール
設定には、快適に操作できるDaVinci Configurator Pro のご利用を推奨します。これには、整合性チェックとジェネレーター呼出し機能が装備 されています。ジェネレーターはコマンドラインツールとして実装されており、コード生成を容易に行うことができます。
2.6 製品に含まれるもの
MICROSAR.OSには、以下のものが含まれます。
> OSコアのソースコード
> BSWの設定ソフトであるDaVinci Configurator Pro(およびコマンドラインベースのジェネレーター)
MICROSAR.COM
3 MICROSAR.COM
通信用AUTOSAR BSWモジュール
MICROSAR.COMのBSWモジュールには、任意の数の通信チャネルをサポートするECU通信用のAUTOSARサービスが含まれています。
これらはバスの種類に依存せず、あらゆる通信スタックで必要とされるサービスです。また、これらはAUTOSARアーキテクチャに準拠し、ECUソ フトウェアに含まれる、CAN、CAN FD、J1939、FR、LIN、ETHなどのバス固有の通信モジュールと合わせて使用されます。
図 5: AUTOSAR 4.3対応のMICROSAR.COMモジュール
3.1 主な特長
> アプリケーションに合った設定でコードや実行時間を最適化
> AUTOSAR 4.xおよび3.xに対応
> AUTOSAR仕様の枠を越えた便利な拡張機能を多数搭載
> Nmコーディネーターに関するサポートの拡張
> Nmモジュール:OSEK Nm互換の設定が可能
> Nm移行プロジェクトにおけるAUTOSAR NmおよびOSEK Nmの同時運用をサポート
> AUTOSAR 3:関数マクロによりシグナルアクセスの効率を向上
3.2 適用分野
MICROSAR.COMを使用することで、バスにまったく依存しない手法で機能ソフトウェアを開発することができます。メッセージ送信やバス間ネット ワーク管理に必要なタスクはすべて、MICROSAR.COMに含まれているBSWモジュールのCom、Nm、PduR、IpduMによって処理されます
(モジュールはコンフィギュレーション可能)。
ゲートウェイECUについては、追加のソフトウェアはいりません。シグナルおよびTpのルーティングや、アプリケーションメッセージのルーティング はMICROSAR.COMに含まれるBSWモジュールのComおよびPduRが行います。
MICROSAR.COM
3.3 モジュールおよびアドオン
MICROSAR.COM の各モジュールには、AUTOSAR 仕様の枠を超えたベクター独自の拡張や、追加のアドオンが装備されている場合がありま す。
> Com - Communication
Comモジュールのサービスは、メッセージの送信タイプ(サイクリック、イベントトリガーなど)に基づき、メッセージ送信を管理します。主なタス クは、バスに依存しないアプリケーションシグナルをPDUに実装することです。
AUTOSAR標準からの拡張
> Rx信号タイムアウト時のTX信号の無効宣言
> main関数の実行時間を短縮するための最適化(Rx側:受信イベントのキャッシング、Tx側:複数の時間ドメインの設定)
> Rx IPDUの遅延イベントキャッシング。これはRx PDUのイベントトリガー処理による、Rx main関数の実行時間の最適化です。この最
適化により、main関数のRxですべてのPDUを周期的にポーリングせずに済みます アドオン
> GW for Com:Comモジュールへのゲートウェイ機能の付与。Comでのルーティングは、実際のシグナルやシグナルグループが存在
しなくても、シグナル、シグナルグループ、Configuration Descriptionにより実現できます
Com Add-on HigEndFeatures:シグナルベースのルーティングやサイクル遅延によるPDUルーティングに替わる極めて高機能なルーテ
ィングを提供します。これによって転送モード(periodic、event-driven、on changes)を含むPDUセグメント(スタートビットとデータ長によ り定義)のルーティングが可能になります。この機能はすべてのCOMモジュールで利用できますが、ゲートウェイオプションであるGW for Comが必要です
> PduR – PDU Router
PDU RouterはComおよびDcmの各モジュールとComplex driverに、異なるバスシステムの通信モジュール(インターフェイス、転送 プロトコル、ネットワークマネージメント)へのインターフェイスを提供します。このインターフェイスはPDUを介したデータの送受信にサービス を提供します。PduRは多様なバスシステムの通信モジュール間のゲートウェイも実装します。MICROSARモジュールのCDDにより、TP およびIF PDUをCOMスタックに統合(PDUルーターの上/下または通信インターフェイスの上)できます。
アドオン
> GW for PDU:TPおよびメッセージルーティングを実現。範囲指定ルーティングの場合はメタデータを使用し、可変アドレス(動的ゲートウ
ェイ)または動的PDU長によってルーティングできます
> Nm – Network Management
Network Management Interface (Nm) は、ECUの通信チャネルすべてのバス間ネットワーク管理機能を提供します。また、Nmコー ディネーターとして、通信チャネルのウェイクアップとスリープを同期します。
AUTOSAR標準からの拡張
> 複数の異なるNmコーディネーターによる、複数ネットワークのスリープとウェイクアップの同期
> バックアップコーディネーター
> 設定可能なOSEK Nmへの対応
> 1つのチャネル上でOSEKとAUTOSAR-Nmの混在運用
> IPduM – I-PDU Multiplexer
オプションとして、ECUソフトウェアの通信スタックでIPduM (I-PDU Multiplexer) を使用することもできます。IPduMは、フレームに対して データの割付けを多重化し、複数の用途で使用できるようにします。これは従来のバスシステムの場合は静的なコンフィギュレーションを通じ て、あるいはCAN FDの場合は動的なデータコンテンツのマッピングを通じて行われます。
> SecOC – Secured OnBoard Communication
SecOC (Secured OnBoard Communication) について詳しくは、「MICROSAR Security」の章を参照してください。
> Transformer
MICROSAR.COM
> SomeipXf:さまざまなデータタイプに応じたシリアル化の手順を提供します。LdComを使用することにより、効率のよい伝送が可能にな
ります
> E2eXf:AUTOSARのトランスフォーマーのコンセプト(ComXfまたはSomeIpXfによるシリアル化)を使用して管理されるネットワーク
通信を、エンドツーエンドで保護します
> Mirror – Gateway Mirroring
ゲートウェイミラーリングによって、内部バスを診断用のチャネルにミラーリングできます。これにより、通常はアクセスできないバス上のメッセ ージを読み込み、問題を特定することができます。基本バージョンの場合、この機能では1つの内部CANまたはLINチャネルを診断用の CANにミラーリングできます。
アドオン
> ETH:複数のCAN、LIN、FR、ETHチャネルの診断用ETHへのミラーリング
> FR:CAN、LIN、FRチャネルの診断用CANまたはFRへのミラーリング
3.4 設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。DaVinci Configurator Proを使用すれば、MICROSAR.COMモジュールのPduRと、Canif、Linif、Frif、Ethif (SoAd) の各モジュールを、設定を使 用してお客様自身のコンプレックスドライバーに簡単にリンクできます。
MICROSAR.CAN
4 MICROSAR.CAN
CAN通信用AUTOSAR BSWモジュール
MICROSAR.CANには、AUTOSARアーキテクチャにCAN通信用に定義されているBSWモジュールCanIf、CanNm、CanTp、CanSMが 含まれており、オプションでJ1939やXcp用モジュールもあります。
図 6: AUTOSAR 4.3対応のMICROSAR.CANモジュール
4.1 主な特長
> AUTOSAR 4.xおよび3.xに対応
> 便利な拡張機能を多数搭載
> ニーズに合わせた設定に基づき、コードおよび実行時間を最適化
> すべての通信固有のソフトウェアモジュールについて、モジュール間設定が可能
> ECU起動時の高速ウェイクアップ処理
> CanTp:ISO 15765-2への対応は設定可能
> CanNmとOSEK Nmの互換性:OSEK Nmは設定可能なモジュールとして利用可能
> CanNm、CanSM:パーシャルネットワークの状態に応じた通信スタックの制御(オン/オフ)
> CAN FD:帯域幅の拡張により最大64バイトのデータをサポートし、多数のCAN FDコントローラーに対応
4.2 適用分野
MICROSAR.CANはCANネットワーク通信に使用され、XCPでのキャリブレーション、ゲートウェイ、リプログラミングなどの用途としても適して います。MICROSAR.CAN を別途入手可能な MICROSAR J1939TP パッケージと組み合わせて拡張することにより、J1939 ネットワークで AUTOSAR ECUを操作することもできます。これにはBAMおよびCMDTトランスポートプロトコルが用意されています。
MICROSAR.CAN
4.3 モジュールおよびアドオン
MICROSAR.CANのBSWモジュールにはAUTOSAR 4.xで定義されている機能が含まれています。MICROSAR.CANには以下の機能があ ります。
> CanIf – CANインターフェイス
CanIfモジュールは、CANドライバーに対する、抽象化された(PDUベースの)アクセスを提供します。これはトランシーバドライバー
(CanTrcv)に加え、CANドライバー(Can)も制御します。
AUTOSAR標準からの拡張
> ダブルハッシュ検索アルゴリズムで受信メッセージをフィルタリング
> CanNm – CAN Network Management
CanNmモジュールは、CANネットワーク内でウェイクアップ状態とスリープ状態を切り替える処理を担当します。
AUTOSAR標準からの拡張
> プリコンパイルによる最適化(シングルチャネルシステムの場合など)
> CanTp – CAN Transport Protocol
CanTpモジュールはISO 15765-2の標準規格に準拠しています。これはCANのトランスポートプロトコルで、送信データのセグメント化、
受信データの収集、データストリームのモニタリングを担当します。
AUTOSAR標準からの拡張
> プリコンパイルによる最適化(シングルチャネルシステムの場合など)
> アドレッシングの混在をサポート(11bitのCAN ID)、主にCAN/LINゲートウェイアプリケーション用
> MICROSAR.COMに含まれるPduRと協調して、ASR 4.0に対応したルーティングの最適化(バースト伝送など)
> ISO 15765-2への対応は設定可能
> CanSM – CAN Station Manager
CanSMモジュールはバス固有のエラー処理を担当します。
AUTOSAR標準からの拡張
> ECUパッシブモードのサポート
> CanTSyn – CAN Time Synchronization
CanTSynモジュールは、CAN固有の時刻同期プロトコルを実装します。同期されているタイムベースにSWCがアクセスするには、
Synchronized Time-Base Manager (StbM) が必要です。
AUTOSAR標準からの拡張
> Time Synchronization over CAN (CanTSyn) は、CANのための時刻同期プロトコルを実装します。これによってAUTOSARのグロ
ーバル時間のコンセプトの一部としてCAN ECU間のクロック同期が可能になります。高レベルの時間コーディネーターには、
MICROSAR.SYSのBSWモジュールであるSynchronized Time-Base Manager (StbM) を利用できます
> CanXcp – CAN XCP Module
Xcpはマスター(PCツール)とスレーブ(ECU)の間の通信のためのプロトコルです。これはASAMによって標準化されており、主にECU の測定、キャリブレーション、フラッシュ、テストに使用されています。XCPはCAN (CanXcp)、FlexRay (FrXcp)、Ethernet (EthXcp)、
LIN (LinXcp) の各バスシステムをサポートします。
> J1939Nm – Network Management for J1939
J1939は動作中のネットワークへのECUの追加をサポートします。J1939Nmモジュールは、バスのウェイクアップまたはスリープ処理を 行う他のNMモジュールとは異なり、固有のECUアドレスを使用することをネットワーク上に宣言します(「AddressClaim」)。
アドオン
> Dynamic Nm:アドレスが変わるECU、またはアドレスが変わるECUと通信するECU
> J1939Tp – Transport Protocol for J1939
MICROSAR.CAN
J1939Tpモジュールには、SAE J1939標準規格のBAM (Broadcast Announce Message) およびCMDT (Connection Mode Data Transfer) のトランスポートプロトコルが含まれています。
アドオン
> ISOBUS:Extended Tp (ETP) およびFast Packet Tp (FPTP)。ISO 11783-2およびNMEA2000に基づいています
> J1939Rm – Request Manager for J1939
J1939Rmモジュールは、SAE J1939プロトコルで定義されているリクエスト処理を介したデータの要求を実装します。
4.3.1 クロスパッケージのアドオン
アドオンの中には複数のパッケージに影響を与えるものもあります。以下にその詳細を示します。
> MICROSAR.IDM – Identity Manager:詳しくは、「MICROSAR Variant Handling」の章をご覧ください
> MICROSAR.MC – Multi-Core:詳しくは、「MICROSAR Multi-Core」の章をご覧ください
> MICROSAR.PBL – Post Build Loadable:詳しくは、「MICROSAR Variant Handling」の章をご覧ください
4.4 設定
設定には、簡単で便利なツールDaVinci Configurator Proのご利用を推奨します。詳しくは、ベクターまでお問い合わせください。
4.5 MICROSAR関連製品
MICROSAR.CANを他のパッケージのモジュールと併せて使用することにより、AUTOSARアーキテクチャに基づく通信スタックを作成できます。
MICROSAR.CAN をアプリケーションおよびハードウェアと接続するには、その他のBSWモジュールも必要です(大部分のマイコンおよびトラン シーバにはMICROSAR.MCALおよびMICROSAR.EXTのモジュールで対応可能)。
> MICROSAR.MCAL:ハードウェア固有CANドライバー(CanDrv)
> MICROSAR.EXT:ハードウェア固有トランシーバ制御(CanTrcv)、パーシャルネットワーキングにも使用可能
> MICROSAR.COM:汎用通信モジュール(Com、Nm、PduR、IpduM)
4.6 CAN用MICROSAR関連製品
> MICROSAR.DIAG:DcmおよびDem
> MICROSAR.SYS:Det、EcuM、ComM
> MICROSAR XCP:ASAM XCPを介した測定とキャリブレーションを可能にします。このモジュールはCANoe.XCP、CANoe.AMD、
CANapeとの併用に特化して最適化されています。CAN ECU用として、対応するCanXcpトランスポートレイヤーが含まれています
> MICROSAR XCP:AUTOSAR仕様の枠を超えて、測定オブジェクトの汎用的な読出しをサポートします。A2Lファイルでのアドレスの定義
や更新は不要です。MCUビルドに関わりなく、あらゆるバージョンおよびバリアントからのデータを、A2Lファイルを用いて抽出できます。汎 用読出し機能を使用するには、XCPツールとしてCANoe.AMDまたはCANapeを使用する必要があります
> VX1000If:安全上の理由から、量産プロジェクトでは測定やキャリブレーションのインターフェイスをアクティブのままにしておくことはほとんど
ありません。VX1000Ifモジュールを使用することにより、測定およびキャリブレーションハードウェアであるVX1000のドライバーを無効化し た状態で残し、テストや開発で必要になった場合にAPI経由で再び有効にすることができます。量産時にこのユースケースを可能にする場 合は、このモジュールをMICROSAR.SIPに含めて納入してください。ただし、量産プロジェクトでVX1000Ifを使用しても、ランタイム中に VX1000ドライバーをアクティブ化することはできません
> 商用車に搭載されるJ1939 ECUについて詳しくは、「MICROSAR J1939」の章を参照してください
MICROSAR.CAN
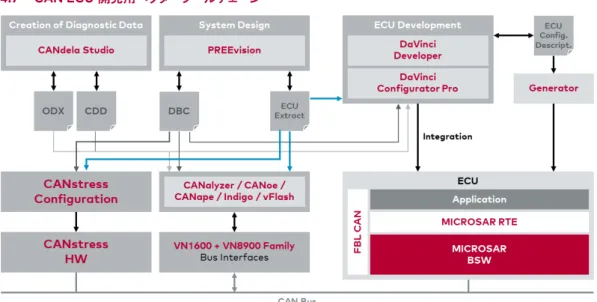
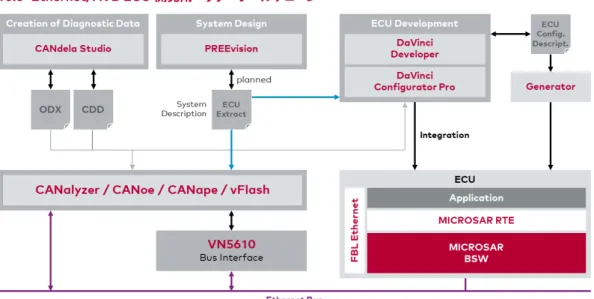
4.7 CAN ECU開発用ベクターツールチェーン
図 7: ベクターは、CANプロジェクト用の幅広い製品およびサービスを提供しています
MICROSAR.FR
5 MICROSAR.FR
FlexRay通信用AUTOSAR BSWモジュール
MICROSAR.FRはAUTOSAR対応のFlexRay通信用パッケージで、オプションとしてXcpでの拡張も可能です。これにはAUTOSARアーキ テクチャで定義されているBSWモジュールのFrIf、FrNm、FrSMが含まれており、FrTpかFrIsoTpのいずれかを選択できます。
図 8: AUTOSAR 4.3対応のMICROSAR.FlexRayモジュール 5.1 主な特長
> AUTOSAR 4.xおよび3.xに対応
> パーシャルネットワークの状態に応じてパーシャルネットワークをアクティブ化/非アクティブ化し、データを提供
> FlexRayインターフェイスのジョブリスト管理を最適化し、コードサイズを縮小、実行時間を短縮
> FrTp (AUTOSAR) またはFrisoTp (ISO 10681) どちらかのトランスポートプロトコルを使用可能
> FlexRay State ManagerでECUパッシブモードをサポート
> 同期ずれを早期検出
5.2 適用分野
MICROSAR.FRは、パーシャルネットワークを含むFlexRayネットワーク通信の処理に使用されます。また、Xcpでのキャリブレーション、ゲート ウェイ、フラッシングの基盤としても適しています。
5.3 モジュールおよびアドオン
MICROSAR.FRのモジュールにはAUTOSAR 4.xで定義されている機能が含まれています。FrIsoTpはAUTOSAR 3.xを補足する目的で提 供されています。
> FrIf – FlexRay Interface
MICROSAR.FR
AUTOSAR標準からの拡張
> CancelTransmitおよびL-PDU再設定APIのサポート
> 冗長フレームを送信するためのチャネルの二重化と、SWCに対するPDU固有の多数決判定機能
> プリコンパイルによる最適化(シングルチャネルシステムの場合など)
> FrNm – FlexRay Network Management
FrNmモジュールはFlexRayのネットワークマネジメントを担当します。これはバスのスリープ状態への移行を同期します。
AUTOSAR標準からの拡張
> プリコンパイルによる最適化(シングルチャネルシステムの場合など)
> FrSM – FlexRay State Manager
FrSMモジュールはFlexRayクラスター内のノードのウェイクアップと起動を制御およびモニターします。
AUTOSAR標準からの拡張
> ECUパッシブモードのサポート、パッシブウェイクアップ後の即時起動、State Change Notificationによるエラー処理の拡張、パッシブ
ウェイクアップ時のFlexRay起動待機時間の設定が可能、ウェイクアップパターン数の設定が可能
> FrTP – FlexRay Transport Protocol
FrTpはFlexRayのトランスポートプロトコルで、ISO 10681-2標準規格に基づいています。
AUTOSAR標準からの拡張
> プリコンパイルによる最適化(シングルチャネルシステムの場合など)
> FrArTp – FlexRay AUTOSAR Tranport Protocol
ISO 15765-2 (CanTp) 標準規格に基づくFlexRayのトランスポートプロトコル。CANバスとのフレーム互換性が含まれています。
> FrTSyn – Time Sync Over FlexRay
FrTSynモジュールは、FlexRay固有の時刻同期プロトコルを実現します。同期されているタイムベースにSWCがアクセスするには、
Synchronized Time-Base Manager (StbM) が必要です。
AUTOSAR標準からの拡張
> Time Synchronization over FlexRay (FrTSyn) は、FlexRayのための時刻同期プロトコルを実装します。これによってAUTOSARの
グローバル時間のコンセプトの一部としてFlexRay ECU間のクロック同期が可能になります。高レベルの時間コーディネーターには MICROSAR.SYSのSynchronized Time-Base Manager (StbM) BSWモジュールを利用できます
> FrXcp – FlexRay XCP Module
FrXcpモジュールには、XCPモジュール(Xcp)のFlexRay固有の内容が含まれています。
5.3.1 クロスパッケージのアドオン
アドオンの中には複数のパッケージに影響を与えるものもあります。
> MICROSAR.IDM:Identity Manager。詳しくは、「MICROSAR Variant Handling」の章をご覧ください
> MICROSAR.PBL:Post Build Loadable。詳しくは、「MICROSAR Variant Handling」の章をご覧ください
5.4 オペレーティングシステム
FlexRayのBSWモジュールはオペレーティングシステムがなくても問題なく使用できますが、AUTOSAR OSまたは従来のOSEK-OS(ベクタ ーのosCANなど)の使用を推奨します。ベクターのMICROSAR.OSは、FlexRayアプリケーションに最適です。
5.5 設定
設定には、簡単で便利なツールDaVinci Configurator Proのご利用を推奨します。詳しくは、ベクターまでお問い合わせください。
MICROSAR.FR
5.6 MICROSAR関連製品
MICROSAR.FR を他のパッケージのモジュールと併せて使用することにより、AUTOSAR アーキテクチャに基づく通信スタックを作成できます。
MICROSAR.FR をアプリケーションおよびハードウェアと接続するには、その他のBSWモジュールも必要です(大部分のマイコンおよびトランシ ーバにはMICROSAR.MCALおよびMICROSAR.EXTのモジュールで対応可能)。
> MICROSAR.MCAL:ハードウェア固有FlexRayドライバー(Fr)
> MICROSAR.EXT:ハードウェア固有トランシーバ制御(FrTrcv)
> MICROSAR.COM:汎用通信モジュール(Com、Nm、PduR、IpduM)
5.7 FlexRay ECU開発用ベクターツールチェーン
図 9: ベクターは、FlexRayプロジェクトに適した豊富な製品ラインナップと各種サービスを提供しています
MICROSAR.LIN
6 MICROSAR.LIN
LIN通信用AUTOSAR BSWモジュール
MICROSAR.LINには、AUTOSARアーキテクチャで定義されているLIN 通信用のBSWモジュールLinIf、LinSM、LinNmが含まれていま す。LIN 通信スタックの中にはトランスポートプロトコルを必要としないものもあるため、LIN 転送プロトコル(LinTp)はオプションとして提供されて います(AUTOSARに準拠し、LinTpはLinIFに統合済み)。MICROSAR.LIN Master用のXcpも、ASAM拡張機能として用意されています。
AUTOSAR 4.4より、LINをマスターかスレーブとして利用できるようになりました。
図 10: AUTOSAR 4.3対応のMICROSAR.LINモジュール 6.1 主な特長
> AUTOSAR 4.xおよび3.xに対応
> 便利な拡張機能を多数搭載
> マルチチャネルのマスターに対するスケジューリングのジッターを最小化
> 診断要求のLINスレーブへのルーティングを最適化
> LINチャネルのクイックスタート
> スケジュールテーブルの切替えに高い信頼性を実現
> LINソフトウェア開発に関するベクターの長年の経験を活用
6.2 適用分野
MICROSAR.LINは、LINネットワークにおけるLINマスターまたはLINスレーブの通信タスクを処理するのに使用されます。また、ゲートウェイ やフラッシングの基盤としても使うことができます。
6.3 モジュールおよびアドオン
MICROSAR.LINのBSWモジュールには、AUTOSAR 4.xで定義されている機能が含まれています。
> LinIf – LIN Interface
MICROSAR.LIN
LinIfモジュールは、LINハードウェアに対する、抽象化された(PDUベースの)アクセスを提供します。また、スケジュールテーブルの処理も 行います。このモジュールはマスターまたはスレーブとして利用できます。
AUTOSAR標準からの拡張
> 設定可能なウェイクアップ遅延
> LinIfおよびLinTpの設定データのメモリマッピングの個別設定が可能。これは、セグメント化したメモリがあるコントローラーにとっては特
に有効な機能です
> スケジュールテーブル終了の通知
> マルチチャネルシステムでのタスクの最大実行時間を短縮するための設定可能なスケジュールテーブル
> LINトランシーバによるウェイクアップ。この機能により、外部からのウェイクアップの後、マスターによる2番目の(不要な)ウェイクアップ
パルスを除外できます
> LinNm – LIN Network Management
LinNmモジュールには、LINネットワークの通常動作とバススリープモードの切替えを調整する、ハードウェアに依存しないプロトコルが含ま れています。AUTOSARバージョン4.4では、LinNmはマスターとしてのみ利用できます。LINスレーブはLinNmを使用しなくなりまし た。
> LinSM – LIN State Manager
LinSMモジュールはComモジュール内のスケジュールテーブルとPDUグループを切り替え、スリープおよびウェイクアップに関するサー ビスをLINインターフェイスに提供します。このモジュールはマスターまたはスレーブとして利用できます。
AUTOSAR標準からの拡張
> インターフェイスを拡張し、LINスケジュールテーブルの切替えを管理するLinSMサブモードを監視
> スケジュールテーブルの自動選択により、起動時の挙動を最適化(設定可能)
> LinTp – LIN Transport Protocol
LinTpモジュールは、送信データのセグメント化、受信データの収集、データストリームのモニタリングを担当します。AUTOSAR仕様に基づ き、LinTpはLinIfの1コンポーネントになっています。このモジュールはマスターまたはスレーブとして利用できます。
6.3.1 AUTOSAR標準から拡張したベクターモジュール
> LinXcp – LIN XCP Module
LinXcpモジュールには、XcpモジュールのLIN固有の内容が含まれています。
6.3.2 クロスパッケージのアドオン
アドオンの中には複数のパッケージに影響を与えるものもあります。Linスレーブはサポートされていません。
> MICROSAR.IDM:Identity Manager。詳しくは、「MICROSAR Variant Handling」の章をご覧ください
> MICROSAR.PBL:Post Build Loadable。詳しくは、「MICROSAR Variant Handling」の章をご覧ください
6.4 設定
設定には、簡単で便利なツールDaVinci Configurator Proのご利用を推奨します。詳しくは、ベクターまでお問い合わせください。
6.5 MICROSAR関連製品
MICROSAR.LIN を他のパッケージのモジュールと併せて使用することにより、AUTOSAR アーキテクチャに基づく通信スタックを作成できます。
MICROSAR.LINをアプリケーションおよびハードウェアと接続するには、その他のBSWモジュールも必要です(大部分のマイコンおよびトランシ ーバにはMICROSAR.MCALおよびMICROSAR.EXTのモジュールで対応可能)。
> MICROSAR.MCAL:ハードウェア固有LINドライバー(LinDrv)
> MICROSAR.EXT:ハードウェア固有トランシーバ制御(LinTrcv)
MICROSAR.LIN
6.5.1 LIN用MICROSAR関連製品
> MICROSAR.SYS:Det、EcuM、ComM
> MICROSAR XCP:ASAM XCPを介した測定とキャリブレーションを可能にします。このモジュールはCANoe.XCP、CANoe.AMD、
CANapeとの併用に特化して最適化されています。LIN ECU用として、対応するLinXcpトランスポートレイヤーが含まれています。XCP- on-LINは公式には定義されていないため、このXCP-on-LIN実装はASAM規格に対応したベクターの拡張機能となっています
> MICROSAR XCP:AUTOSAR仕様の枠を超えて、測定オブジェクトの汎用的な読出しをサポートします。A2Lファイルでのアドレスの定義
や更新は不要です。MCUビルドに関わりなく、あらゆるバージョンおよびバリアントからのデータを、A2Lファイルを用いて抽出できます。汎 用読出し機能を使用するには、XCPツールとしてCANoe.AMDまたはCANapeを使用する必要があります
> VX1000If:安全上の理由から、量産プロジェクトでは測定やキャリブレーションのインターフェイスをアクティブのままにしておくことはほとんど
ありません。VX1000Ifモジュールを使用することにより、測定およびキャリブレーションハードウェアであるVX1000のドライバーを無効化し た状態で残し、テストや開発で必要になった場合にAPI経由で再び有効にすることができます。量産時にこのユースケースを可能にする場 合は、このモジュールをMICROSAR.SIPに含めて納入してください。ただし、量産プロジェクトでVX1000Ifを使用しても、ランタイム中に VX1000ドライバーをアクティブ化することはできません
6.6 LIN ECU開発用ベクターツールチェーン
図 11: ベクターは、LINプロジェクト用の幅広い製品ラインナップを提供しています
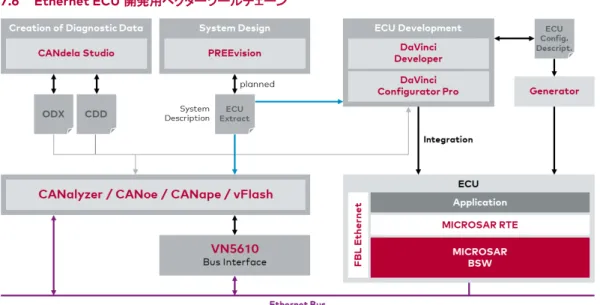
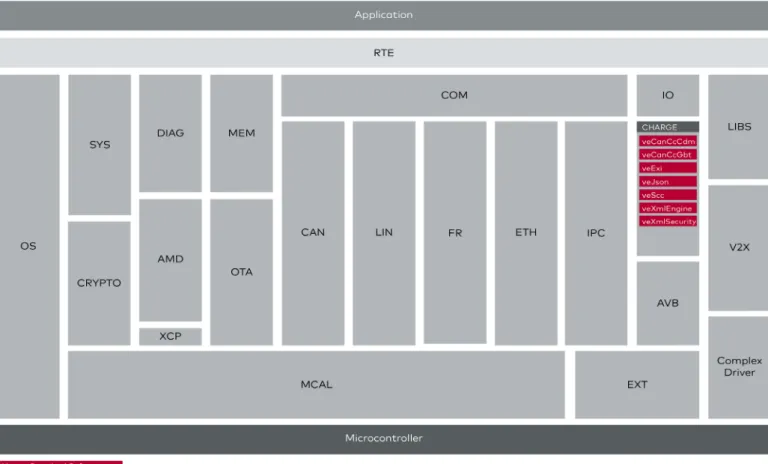
MICROSAR.ETH
7 MICROSAR.ETH
Ethernet通信用AUTOSAR BSWモジュール
Internet Protocolとその上位層にあるUDPおよびTCPの両トランスポートプロトコルは、Ethernetを介した高速データ交換を目的として、極 めて幅広く使われている規格です。
MICROSAR.ETH パッケージには、ECU 間のEthernet 通信に関する自動車用規格に準拠して開発された TCP/IP スタックをはじめとする AUTOSAR BSW モジュールが含まれています。AUTOSAR 4.0 は、Ethernet を初めてネットワークテクノロジとして規定したバージョンです。
AUTOSAR 4.1では、この仕様が大幅に加筆修正されました。AUTOSAR 4.2ではさらに、Ethernetスイッチの設定やECU間の時刻同期など が明記されています。MICROSAR.ETHのBSWモジュールは、AUTOSAR 4.xに対応し、さらにAUTOSAR 3.xを補足するものとして提供さ れています。
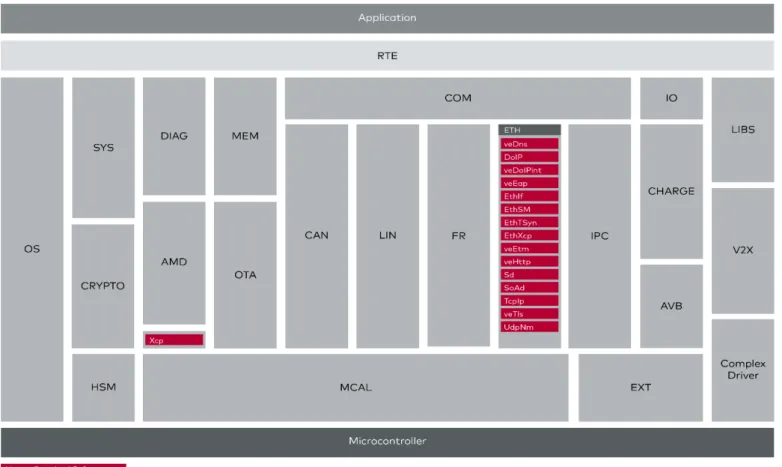
図 12: AUTOSAR 4.3対応のMICROSAR.ETHモジュール
7.1 主な特長
> BSWモジュールはAUTOSAR 4.xおよびベクターの拡張機能で使用可能
> TCP/IPスタックは自動車用規格に準拠して開発され、IETFの適合性は、サードパーティ製OPEN ALLIANCE TC8で定期的に検証
> オープンソースソフトウェアは不使用
> Vehicle-to-Grid通信(MICROSAR.CHARGE)やAudio/Video Bridging (MICROSAR.AVB) などをAUTOSAR Ethernetおよび
TCP/IPスタックにシームレスに統合
> お客様固有の機能/モジュールをあらゆるレベルでシンプルに統合
7.2 適用分野
MICROSAR.ETHを組み込んだECUをサーバーとし、従来のPCまたは診断テスターをクライアントとした構成により、以下が可能になります。
> ISO 13400-2 (DoIP) に準拠した車両診断
MICROSAR.ETH
で並行して再プログラミングすることが可能となります。MICROSAR.ETHは他のMICROSARパッケージと連携して、これに必要になるゲートウ ェイ機能を実装します。ベクターのFlash Bootloader でMICROSAR.ETH を使用していれば、Ethernet ネットワークに相互接続されている ECU(ゲートウェイ本体など)をDoIP経由で直接再プログラミングできます。
Ethernet ECUの測定およびキャリブレーション用に提供されるMICROSAR XCP on Ethernetを使用すれば、帯域幅を余裕を持って利用で きるようになります。XCPルーティングによりゲートウェイが拡張され、CANおよびFlexRayのECUも(車載)Ethernetポート経由でXCPによ り測定することが可能になります。
MICROSAR.ETHは、診断、測定、キャリブレーションなどの適用分野で、外部インフラストラクチャと車両を結ぶEthernet ベースの通信を可能 にするだけでなく、車内のEthernet ネットワークを効率的に利用することも可能にします。「IPを介するスケーラブルなサービス指向のミドルウェ ア(Scalable service oriented middleware over IP)」、すなわちSOME/IPを使用すれば、たとえばデータをサービス指向で送信することが できます。これには、AUTOSAR 4.1.1で導入された、サービス管理のためのService Discovery BSWモジュール(SD)の使用が必要になりま す。サービス指向のほかに、SOME/IPではデータの動的なシリアル化が可能です。この実装はRTEトランスフォーマーとして提供されています。
SOME/IPトランスフォーマーについて詳しくは、MICROSAR.RTEおよびMICROSAR.COMの各章をご覧ください。
Ethernet上でのシグナルベースおよびPDUベースのデータ送信ももちろん可能です。
MICROSAR.ETHの一部は、Vehicle-to-Grid通信やAudio/Video Bridgingの基盤としても機能します。これらの適用分野について詳しくは、
MICROSAR.CHARGEおよびMICROSAR.AVBの各セクションをご覧ください。
7.3 モジュールおよびアドオン
以下に示すMICROSAR.ETHのBSW モジュールには、AUTOSAR 4.1.x で定義されている機能が含まれています。AUTOSAR 4.0 または AUTOSAR 3.xソフトウェアスタックで使用できるよう、これらには適切な互換インターフェイスが用意されています。
> veDns – Domain Name System Resolver
veDnsモジュールにはDNSリゾルバーが含まれています。これにはたとえばvector.comなどのドメインを、有効なIPアドレスに解決す る役割があります。
> EthIf – Ethernet Interface
Ethernet Interface (EthIf) は、Ethernetドライバー(EthDrv)とEthernetトランシーバドライバー(EthTrcv)に対する、ハードウェアの 種類に依存しないアクセスを可能にします。AUTOSAR 4.1より、このモジュールはVLANの処理も担当しています。Ethernetスイッチドラ イバー(EthSwtDrvおよびEthSwtDrv EXT)のハードウェアに依存しない制御は、AUTOSAR 4.2よりEthIfに含まれています。
> EthSM – Ethernet State Manager
Ethernet State Manager (EthSM) は、Ethernetクラスターで通信を起動または終了するための、Communication Manager (ComM) に対する抽象化されたインターフェイスを提供します。EthSMはEthIfを介してEthernetハードウェアにアクセスします。
> EthTSyn - Time Sync Over Ethernet
Time Synchronization over Ethernet (EthTSyn) は、IEEE 802.1ASに準拠したEthernetのための時刻同期プロトコルを実装しま す。これによってAUTOSAR のグローバル時間のコンセプトの一部としてEthernet ECU間のクロック同期が可能になります。高レベルの 時間コーディネーターにはMICROSAR.SYSのSynchronized Time-Base Manage (StbM) BSWモジュールを利用できます。
> 必要なすべてのハードウェアインターフェイスの初期化
> Ethertypeが0x88F7のEthernetフレームをEthIfからEthTSynにルーティング
> gPTP (Generalized Precision Time Protocol) とAUTOSARの拡張のサポート
> 一般メッセージとイベントメッセージのサポート
> Pdelay_Req、Pdelay_Resp、Pdelay_Resp_Follow_Upといった伝播遅延時間の計算のサポート
> Sync、Follow_Upなどの同期タイムスタンプの転送のサポート
> veHttp – Hypertext Transfer Protocol
Hypertext Transfer Protocolのアプリケーションの1つとして、サーバーへのブラウザー要求の送信が挙げられます。このモジュールに はHTTPクライアントが含まれています。
> SoAd – Socket Adaptor
Socket Adaptor (SoAd) は、AUTOSARで定義されているPDU単位の通信をソケット指向の通信に変換します。AUTOSAR 4.0では、
SoAdにはISO 13400-2で定義されている診断機能(DoIP)も含まれています。AUTOSAR 4.1ではこのプラグインは切り離され、独立し たモジュールとして規定されています(DoIP)。さらに、SoAdにはXCPルーティング用の拡張が実装されています。
MICROSAR.ETH
「SoAd (BSD)」アドオンを使用すれば、SoAdとその上位層のモジュールを、Linuxなどの非AUTOSAR環境でも使用できるようになりま す。
> DoIP – Diagnostic over IP
Diagnostics over IP (DoIP) モジュールはAUTOSAR 4.1.1で有効になったモジュールで、これにはこれと同じ名前の、ISO 13400-2に 準拠した診断機能が含まれています。AUTOSAR 4.0.3以前は、この機能はSocket Adaptor (SoAd) の一部でした。
> veDoIPint – Diagnostic communication over IPのためのクライアントおよびサーバー
veDoIPintはIP経由で診断データを転送するプロトコルを実装します。これはISO 13400に準拠したDoIPモジュールから派生したモジ ュールで、車内通信用に適合されています。DoIPの仕様では常にテスターが接続を開始し、ECUは接続の着信を待機していますが、
veDoIPintモジュールは両方の役割を実装します。そのためveDoIPintモジュールは車両内のどのノードでも使用可能です。
> veSwt – Switch
veSwtは、車載スイッチに使用されるインテリジェントなEthernetスイッチデバイスのための、スタンドアロンのファームウェアソリューション です。
veSwtには主に以下の特徴があります。
> 関連するBSWモジュールを含むCPUサブシステムをスタンドアロンで動作およびブートし、スイッチおよびモード管理を行う
> CPUサブシステムからEthernetおよびスイッチレジスタへフルアクセス可能
> 接続されているPHYのランタイム設定
> AUTOSAR互換の時刻同期およびコーディネーション
> リモートプロシージャコール(RPC)を使用したホストコントローラーとの汎用通信(ホストコントローラーにMICROSAR Rpcが必要)
> MICROSAR OSとランタイム環境(Rte)を含む
> AUTOSAR SWCを使用したアプリケーションコードの統合が可能
> 設定にはDaVinci Configurator Proを利用し、実績あるAUTOSAR設定ワークフローに従うことを推奨
アドオン
> veSwt Add-On FIrewall
> TcpIp – Transmission Control Protocol/Internet Protocol
このモジュールには、UDPおよびTCPベースの通信で利用されるプロトコルが含まれており、IPv4とIPv6、さらに両方を1つのECUで パラレルに動作させることをサポートしています。
車外の外部インフラストラクチャとの通信などのユースケースでは、状況によりTCP/IPスタックに追加の機能が必要になる場合があります。
そのため、MICROSARのTcpIpモジュールは、AUTOSAR仕様の枠を越えた機能を備えて、このようなシナリオに対応しています。
TcpIpモジュールには、AUTOSAR 4.2でのEthernetスイッチのサポートと併せて、スイッチポートに基づいてIPアドレスを割り当てる DHCPv4サーバーが追加されました。このDHCPv4サーバーはTCP/IPアドオンとして使用可能です。
アドオン
TcpIpを機能させるには、以下のアドオンが少なくとも1つ必要です。
> TcpIp v4:IPv4、ICMPv4、ARP、DHCPv4(クライアント)
> TcpIp v6:IPv6、ICMPv6、NDP、DHCPv6(クライアント)
> IpSec – Ethernet Security:詳細については、「MICROSAR Security」の章を参照してください
> Sd – Service Discovery
Service Discovery (Sd) は、AUTOSAR 4.1.1で初めて規定されたものです。ECUはこのモジュールによって実装されるプロトコルを介し て、自身のサービスの利用可能性を通信相手に伝えます。さらに、シグナル更新時などに自動通知を受信するためにECUはそのようなサ ービスを登録できます。
> UdpNm – UDP Network Management
![図 21: DaVinci Configurator Pro による事前設定済みのステートマシン。Module Initialization および Communication Control の自動設定のほか、プロジェクトに関連 した BSW 管理の設定([Custom Configuration])の領域も表示](https://thumb-ap.123doks.com/thumbv2/123deta/7605310.2539703/44.892.65.841.118.610/DaVinciによる事前設定済みステートマシンModuleおよび自動設定プロジェクト.webp)
