この事業は、競輪の補助金を受けて実施したものです。
URL: http://keirin.jp/
システム技術開発調査研究 18-R-14
高度なマヌーバビリティを有する 地球観測監視衛星に関する調査研究
報 告 書 -要 旨-
平成 19 年 3 月
財団法人 機械システム振興協会
委託先 財団法人 無人宇宙実験システム研究開発機構
序
わが国経済の安定成長への推進にあたり、機械情報産業をめぐる経済的、社会的諸条件 は急速な変化を見せており、社会生活における環境、防災、都市、住宅、福祉、教育等、直 面する問題の解決を図るためには、技術開発力の強化に加えて、ますます多様化、高度化す る社会的ニーズに適応する機械情報システムの研究開発が必要であります。
このような社会情勢に対応し、各方面の要請に応えるため、財団法人機械システム振興 協会では、日本自転車振興会から機械工業振興資金の交付を受けて、機械システムの調査研 究等に関する補助事業、新機械システム普及促進補助事業を実施しております。
特に、システム開発に関する事業を効果的に推進するためには、国内外における先端技 術、あるいはシステム統合化技術に関する調査研究を先行して実施する必要がありますので、
当協会に総合システム調査開発委員会(委員長 政策研究院 リサーチフェロー 藤正 巖氏)
を設置し、同委員会のご指導のもとにシステム技術開発に関する調査研究事業を実施してお ります。
この「高度なマヌーバビリティを有する地球観測監視衛星に関する調査研究報告書」は、
上記事業の一環として、当協会が財団法人無人宇宙実験システム研究開発機構に委託して実 施した調査研究の成果であります。
今後、機械情報産業に関する諸施策が展開されていくうえで、本調査研究の成果が一つ の礎石として役立てば幸いであります。
平成19年3月
財団法人機械システム振興協会
はじめに
本報告書は、財団法人無人宇宙実験システム研究開発機構が、平成18年度事業とし て、財団法人機械システム振興協会から受託した「高度なマヌーバビリティを有する地球観 測監視衛星に関する調査研究」の実施内容をまとめたものです。
安全保障、災害監視、資源探査など観測衛星の需要は増大していますが、異なる目的に ついて必要とされる地域を観測するためには、数多い衛星を打上げて対応する必要がありま す。
しかしながら、複数の衛星の打上げには、莫大な打上げ・運用費用が必要でありリスク も増大します。また、これらの衛星の寿命終了後は宇宙のごみ(デブリ)となり、将来的に 宇宙利用に対する障害になるおそれがあります。
それらの解決策として、軌道変更用の推進装置を保持する衛星を打上げることによって 運用の自由度を増し、1機で観測ニーズに合わせて軌道を変更する運用が可能となるシステ ムの検討を実施した結果が本調査研究です。
検討にあたっては、本機構内に「高度なマヌーバビリティを有する地球観測監視衛星検 討委員会:委員長 上杉邦憲 元宇宙科学研究所 教授」を設置し、各分野の専門の委員の 皆様から熱心なご討議、ご指導をいただきました。
本調査研究の成果が関連各社にとって参考となり、機械振興の一助となれば幸いです。
平成19年3月
財団法人 無人宇宙実験システム研究開発機構
緒 言
21世紀の人類にとって喫緊の課題であるエネルギー、人口・食料、環境のいずれ の問題に対しても、解決のための貴重な情報を得る一手段として、人工衛星による地球観測 が極めて重要な役割を果たすことは論を待たない。特に資源探査、農作物・植生の観測、気 象観測等において、陸域・海域を問わず、ますます高精度、高分解能且つ継続的観測が必要 であるのに加え、災害監視、安全保障等に関して観測の迅速性・即応性も要求されている。
財団法人無人宇宙実験システム研究開発機構(USEF)は、軌道変更用の推進装 置を持つ衛星によって上記の要求を1機の衛星で満たす、という斬新なコンセプトのシステ ムとして「高度なマヌーバビリティを有する地球観測監視衛星(HiMEOS)」を構想、提案し たところである。
本委員会はUSEFの委託により、USEFが実施する同衛星計画のミッション解析、
即ち地球観測衛星のニーズ調査及び分析、技術動向調査及び分析並びにシステム構想の検討 に関し、専門的見地から意見を述べ助言することを目的として設置された。委員会は平成1 8年12月、平成19年1月及び2月の3回開催され、討議を行うとともに、USEFとの 密接なる連絡によりミッション解析の細部にわたる意見交換とアドバイスを行った。
本報告書は、これらの討議を経て纏められたものであり、本委員会としても、今後の我 が国の所謂安全・安心を確保し、社会生活における諸問題解決に資する機械情報システムの 一つとして、HiMEOS が高い意義を有するのみならず、技術的フィージビリティも充分であ ると考えるものである。
今後、USEFが更なる具体的検討を進め、関係諸機関の支援により、HiMEOS が実際の 衛星計画へと進むことを期待したい。
平成19年3月
高度なマヌーバビリティを有する地球観測監視衛星検討委員会 委員長 上杉 邦憲
目次 序
はじめに 緒 言
1 調査研究の目的 ... 1
2 調査研究の実施体制 ... 2
3 調査研究の内容 ... 6
第 1 章 地球観測衛星ニーズ調査及び分析 ... 7
1.1 目的 ... 7
1.2 地球観測衛星に対するニーズ調査 ... 7
1.2.1 ミッション要求のまとめ ... 8
1.3 ニーズまとめ ... 9
第 2 章 技術動向 ... 11
2.1 観測衛星 ... 11
2.1.1 観測衛星の動向 ... 11
2.1.2 まとめ ... 14
2.2 センサ動向 ... 15
2.2.1 光学センサ ... 15
2.2.2 合成開口レーダ ... 15
2.3 観測データ通信、伝送方式の技術動向 ... 16
2.3.1 観測データ通信、伝送方式 ... 16
2.3.2 通信系の使用周波数帯 ... 16
2.4 運用管制システムの現状 ... 19
2.4.1 各国追跡ネットワーク(地上局)の現状 ... 19
2.4.2 各国衛星運用システムの現状 ... 24
2.4.3 分析とまとめ ... 25
第 3 章 システム構想検討 ... 28
3.1 構想検討の前提 ... 28
3.2 軌道検討 ... 28
3.2.1 低軌道周回軌道比較 ... 28
3.2.2 位相回帰軌道 ... 29
3.2.3 太陽同期回帰軌道 ... 31
3.3 軌道変更機能の検討 ... 32
3.3.1 軌道変更について ... 32
3.3.2 高度変更と必要なΔV ... 33
3.3.3 軌道変更頻度と実現性 ... 33
3.4 姿勢変更機能の検討 ... 35
3.4.1 姿勢変更の有効性 ... 35
3.5 軌道維持方法の検討 ... 37
3.5.1 軌道維持について ... 37
3.5.2 空気密度モデル ... 37
3.5.3 空気抵抗と高度維持方法 ... 37
3.6 運用の自動化・自律化 ... 38
3.6.1 姿勢変更における自律化 ... 38
3.6.2 軌道変更における自律化 ... 38
3.7 非デブリ化の検討 ... 39
3.7.1 スペースデブリ低減施策の基本方針 ... 39
3.7.2 デブリ低減施策のミッション・ライフサイクルへの位置付け ... 39
3.7.3 宇宙機設計・開発への反映 ... 39
3.7.4 宇宙機運用への反映 ... 39
3.7.5 有用軌道からの排除(廃棄フェーズ) ... 40
3.7.6 地上安全性の確保 ... 40
3.8 民生技術活用 ... 41
3.8.1 民生部品・民生技術の必要性 ... 41
3.8.2 民生部品・民生技術活用上の問題点 ... 41
3.8.3 民生部品の宇宙機等への適用方法 ... 42
3.9 システム構想例 ... 43
3.9.1 全体システム概要 ... 43
3.9.2 運用概要(パターン例) ... 44
3.9.3 ミッション系 ... 45
3.9.4 宇宙機システム ... 47
3.9.5 運用管制システム ... 49
3.9.6 HiMEOSシステムシミュレーション ... 50
3.10 HiMEOSの意義について ... 52
5 調査研究の今後の課題及び展開 ... 54
5.1 今後の課題 ... 54
5.2 今後の展開 ... 56
参考文献 ... 57
1 調査研究の目的
近年高解像度の画像を撮影し、ユーザに提供する衛星が打上げられ、サービスに供され始 めている。これは従来の資源探査衛星のように、比較的マクロな地上の情報を観測し、それに 基づき資源や気象等のマクロな解析をするというよりも、特定の場所の形状や状態を把握し、
その場所の監視やミクロな情報の取得を目的としており、またどちらかと言えば年オーダのグ ローバルな観測よりも、特定地域の高頻度で詳細な観測を目的としている。このような観測衛 星については、日本としても様々な観点からのニーズに応えるために取り組む必要があると考 えられる。
この問題意識のもとで、本調査研究は次のような特色を持つ「高度なマヌーバビリティを 有する地球観測監視衛星システム」(HiMEOS: Highly Maneuverable Earth Observation Satellite systems)について、ニーズや技術の動向調査、ニーズに応じた軌道や姿勢の変更 機能、自動自律化の検討、地上へのデータの伝送方法の等の検討を行い、システムの概略の構 想を明確化するとともに、次のシステム定義フェーズに向けての課題を明確化することを目的 として実施した。
「高度なマヌーバビリティを有する地球観測監視衛星システム」の特色
・高分解能センサを搭載する。
・回帰軌道の周回を基準とするが、必要に応じ軌道マヌーバを行い、別の地表の観測が可能な 回帰軌道へ移行する。
・姿勢マヌーバをすることで、直下観測領域以外であっても必要場所のデータを次々に取得す る。
・必要に応じて軌道高度を下げ、ズームアップしてより高分解能データ(精密画像データ)の 取得を実施する。
2 調査研究の実施体制
本調査研究の実施体制は、(財)機械システム振興協会内に「総合システム調査開発委員会」
を、(財)無人宇宙実験システム研究開発機構内に「高度なマヌーバビリティを有する地球観 測監視衛星検討委員会」を設置し、本調査研究の計画、実施状況、実施結果について意見・ア ドバイスをいただきながら進めた。技術分析、評価は財団法人無人宇宙実験システム研究開発 機構で実施したが、検討に必要な情報収集は外注作業として企業に請け負わせて実施した。ま た、基本となる軌道変更機能や自律軌道維持・変更/姿勢変更機能に係わる解析、検討は、機 構の技術要求に基づき専門企業に再委託し実施した。
(財)機械システム振興協会 総合システム調査開発委員会
NEC 東芝スペースシステム株式会社:センサ及び通信方式の技 術動向調査
委託
再委託
富士通株式会社:衛星運用システムの技術動向調査
(財)無人宇宙実験システム研 究開発機構 (USEF)
三菱電機株式会社:軌道変更機能の検討及び自律軌道維持・変 更/姿勢変更機能の検討
高度なマヌーバビリティを有す る地球観測監視衛星検討委員会
外注
外注 外注
三菱総合研究所:観測衛星のニーズ、技術動向調査 外注
株式会社イメージワン:地球周回軌道のシミュレーション作業
各役割・構成は以下のとおりである。
・機械システム振興協会、総合システム調査開発委員会は、全体の進行や作業状況の チェックを行い、成果報告書を確認する。
・無人宇宙実験システム研究開発機構は、外注先からの技術情報、再委託先からの解 析、検討結果を元に、ニーズの分析、技術動向分析、システム構想検討、全体のと りまとめを行う。
・高度なマヌーバビリティを有する地球観測監視衛星検討委員会は、大学、企業の専 門家等で構成し、無人宇宙実験システム研究開発機構が実施する検討内容について の技術支援、検討成果のレビューを実施する。
・再委託先の三菱電機株式会社は、基本となる軌道変更機能や自律軌道維持・変更/
姿勢変更機能に係わる解析、検討を実施する。
・外注先として、NEC 東芝スペースシステム株式会社はセンサ及び通信方式の技術動向 調査、富士通株式会社は衛星運用システムの技術動向調査、三菱総合研究所は観測 衛星のニーズ、技術動向調査、そして株式会社イメージワンは地球周回軌道のシミ ュレーション作業を実施する。
総合システム調査開発委員会の委員名簿を以下に示す。
総 合 シ ス テ ム 調 査 開 発 委 員 会 委 員 名 簿 (順不同・敬称略)
委員長 政策研究院 藤 正 巖 リサーチフェロー
委 員 埼玉大学 太 田 公 廣 地域共同研究センター
教授
委 員 独立行政法人産業技術総合研究所 金 丸 正 剛 エレクトロニクス研究部門
副研究部門長
委 員 独立行政法人産業技術総合研究所 志 村 洋 文 産学官連携部門
委 員 東北大学 中 島 一 郎 未来科学技術共同研究センター
センター長
委 員 東京工業大学大学院 廣 田 薫 総合理工学研究科
教授
委 員 東京大学大学院 藤 岡 健 彦 工学系研究科
助教授
委 員 東京大学大学院 大 和 裕 幸 新領域創成科学研究科
教授
また、(財)無人宇宙実験システム研究開発機構内に置かれた「高度なマヌーバビリテ ィを有する地球観測監視衛星検討委員会」の委員名簿を以下に示す。
氏 名 所 属 上杉 邦憲
(委員長)
元 宇宙航空研究開発機構宇宙科学研究本部 宇宙航行システム研究系 研究主幹 教授
池本 多賀史 株式会社ニューズラボラトリー 会長
葛岡 成樹 株式会社 イメージワン 技師長
斉藤 宏文 宇宙航空研究開発機構宇宙科学研究本部
宇宙情報‣エネルギー工学研究系 研究主幹 教授
坂井 真一郎 宇宙航空研究開発機構宇宙科学研究本部
宇宙探査工学研究系 助教授
佐鳥 新 北海道工業大学 電気電子工学科 教授
中須賀 真一 東京大学 大学院工学系研究科航空宇宙工学専攻 教授
梅干野 晁 東京工業大学大学院 総合理工学研究科
環境理工学創造専攻 教授
開催した委員会の開催日と主要テーマを以下に示す。開催場所はUSEF会議室。
第 1 回:2006 年 12 月 11 日(月)委員会発足、調査研究の進め方に関する審議 第2回:2007 年1月 18 日(木)調査研究の中間報告に関する審議
第 3 回:2007 年 2 月 20 日(火)調査研究の最終報告案に関する審議
3 調査研究の内容
調査研究の内容は、以下の 3 項目について行った。項目毎に本節 1 章、2 章、3 章にまと めている。
(1)地球観測衛星ニーズ調査及び分析
災害監視、各種資源探査、環境監視、安全監視等において必要とされるミッション性能、
運用高度、運用軌道について調査及び分析を行った。
(2)技術動向
観測衛星の技術動向調査、センサ及び通信方式の技術動向調査、衛星運用システムの技 術動向調査及び分析を行った。
(3)システム構想検討
ニーズ/ミッションが変更された場合でも対応可能な高度なマヌーバビリティを有する 衛星システムを実現させるために以下の項目について検討し、システム構想検討としてま とめた。また、地球周回軌道のシミュレーション作業も実施した。
a.軌道高度変更機能
顧客のニーズ変化に応じた軌道/高度変更機能の検討を行った。
b.自律軌道維持・変更/姿勢変更機能
自律的な軌道/姿勢の変更方法の検討を行った。
c.取得データの効率的処理/伝送技術
効率の良い衛星データ処理システム及び地上局ネットワークシステムの検討を行った。
重要観測対象を 高頻度観測
新たな 重要観測対象
・高頻度観測
・低高度精密観測
高度変更 軌道変更 軌道 マヌーバ
突発
定常時 緊急時
姿勢マヌーバ/高分解能センサの活用による観測領域確保 重要観測対象を
高頻度観測
新たな 重要観測対象
・高頻度観測
・低高度精密観測
高度変更 軌道変更 軌道 マヌーバ
突発
定常時 緊急時
姿勢マヌーバ/高分解能センサの活用による観測領域確保
第1章 地球観測衛星ニーズ調査及び分析1.1 目的
地球観測衛星に関するニーズ調査を実施し、マヌーバビリティの向上に対するニーズを 抽出するとともに、調査結果を運用シナリオへ反映する。
1.2 地球観測衛星に対するニーズ調査
全体として、地球観測衛星に対してどのようなニーズがあるか、またその中で今回特に 関係する観測頻度と分野との関係等について記述する。
立体視
空間分解能 スペクトル 観測頻度 入手時間 VN S T
農 業 分 野 作物品質・生産性向上(米麦作) ○ ○ ◎ ◎ ◎ × ×
作付け面積・出荷時期調整 △ ○ ◎ ◎ ◎ ○ ×
食糧安定確保のための戦略的情報提供 △ ○ ◎ ◎ ◎ ○ ○
農業統計整備への支援情報 ◎ ○ ◎ ◎ ◎ ○ × ○
林 業 分 野 森林の多面的機能保全 ○ ○ ○ △ ◎ ○ ×
国内森林の森林認証 ◎ ○ ○ ○ ◎ ○ × ○
海外植林事業,違法伐採監視、輸入材の監視 ○ ○ ○ ○ ◎ ○ ○ ○
漁 業 分 野 漁業効率化 △ ◎ ◎ ◎ ◎ × ◎
漁業資源管理 △ ◎ ◎ ◎ ◎ × ◎
漁場の水質汚染時における被害軽減 △ ◎ ◎ ◎ ◎ × ◎
資 源 分 野 石油資源・非鉄金属資源探鉱 ○ ◎ △ △ ○ ◎ ◎ ○
鉱山および油田の環境保全事業 ○ ◎ ○ ○ ◎ ◎ ○
環 境 分 野 プロジェクトモニタリング・認証事業 ○ ○ ○ ○ ◎ ○ ○
温暖化防止・抑制における情報提供 △ ○ ○ △ ◎ ○ ○
自治体環境保全施策における支援 ◎ ○ ○ ○ ◎ △ ○
土壌汚染アセスメント ◎ ◎ △ ○ ◎ ◎ ×
国 土 管 理 分 野 治水・道路整備事業 ◎ ○ ◎ ○ ◎ ○ ○ ○
都市・地域整備事業 ◎ ○ ◎ ○ ◎ ○ ○ ○
防 災 分 野 国内防災行政 ◎ ○ ◎ ◎ ◎ △ ◎ ○
海外(アジア地域)の災害被害軽減 △ ○ ◎ ◎ ◎ △ ◎ ○
地 図 ・G IS作 成 国内の地形図修正 ◎ △ ○ △ ◎ × × ○
民間GISデータ整備 ◎ ○ ○ ○ ◎ × × ○
海外地形図作成・修正 ○ △ ○ △ ◎ × × ○
教 育 分 野 e-Learning市場におけるコンテンツ ○ △ △ △ ◎ × ○ ○
エン ターテイメ ン ト ビデオゲームにおけるコンテンツ ○ △ △ △ ◎ × × ○
防 衛 分 野 国内防衛分野におけるデータ整備 ◎ ○ ◎ ◎ ◎ ○ ○ ○
大分類 小分類 優 先 度 主な利用波長帯
図 1.2-1 地球観測衛星に関するニーズ 参考文献 1-1)
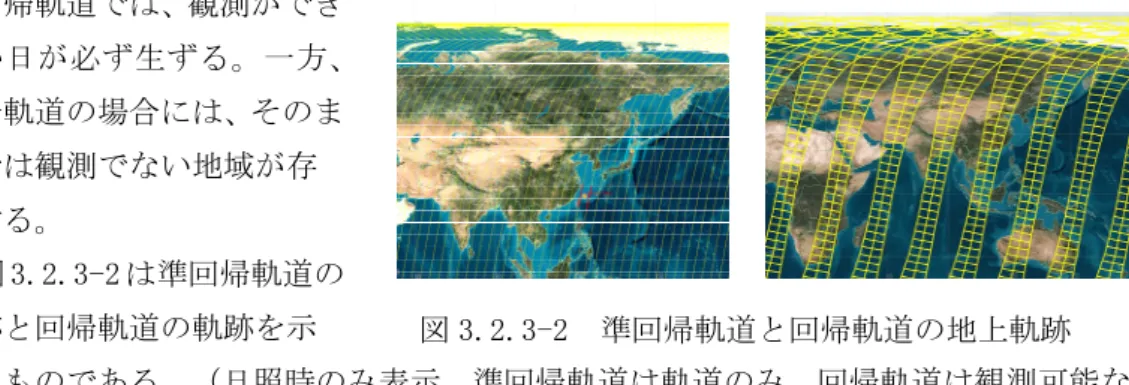
本前提に基づく、観測シナリオの概念を図1.2-2に示す。
1.2.1 ミッション要求のまとめ
(1)マヌーバビリティ向上の効果
ユーザの立場からみたマヌーバビリティ向上の効果は、以下に分類することが出来る。
表 1.2.1-1 マヌーバビリティ向上の効果
効果 達成方法
観測頻度の向上 ポインティングとの組み合わせによる同一地点観 測の高頻度化
時期による観測対象地域の変更 FORMOSAT-2 型軌道(回帰日数 1 日)における全球 観測の実現
緊急時等における観測の即時性 特定地点の観測に適した軌道設定 直下視観測の増加(ポインティングを
用いないターゲット観測)
画像の倒れこみの軽減、観測条件の均一性確保 空間分解能の可変化
(光学センサのみ)
軌道高度の変更による高分解能化・広域観測化 周回軌道での動画観測 アジリティ確保による一定時間において同一地点
を連続観測する姿勢制御
(2)各利用分野における利用可能性
以下に、利用分野ごとのマヌーバビリティに対する要求を整理する。
表 1.2.1-2 マヌーバビリティに対する要求
利用分野 マヌーバビリティ向上への期待 想定センサ 災害監視・安
全
特に災害・事故発生時等に他の衛星と連携して観測 ターゲットを絞り込み、集中的に監視を行う運用
VNIR:高分解能 TIR:高分解能 資源探査・
エネルギー
資源探査を目的としたニーズは低いが、環境影響評 価と施設管理に関しては有望
VNIR:高分解能 TIR:高分解能 ハイパースペクトル 環境 基本的には長期間にわたる継続観測の要求が最も高
い。一方、廃棄物監視、環境アセスメントにおいて は、可能な限りリアルタイム観測が求められる
VNIR:高~中分解能 TIR:高~中分解能 ハイパースペクトル 農業 農作物の生育に合わせた適切なタイミングでの観測
ニーズ(例えば、稲作の場合には、夏季 4 ヶ月間に 少なくとも二回データを取得する必要)。
VNIR:高~中分解能 ハイパースペクトル 漁業 漁場・沿岸汚染等の突発的な事態への対応 VNIR:高~中分解能 TIR:高~中分解能 林業 林野火災等の災害を除き、長期間かつ継続的な観測
が望まれているため、マヌーバビリティ向上に対す るニーズは高くない。
TIR:高~中分解能
(林野火災時)
都市環境 特に熱環境解析を目的として、高頻度の熱赤外デー タ取得に対して高いニーズ
高精度な緑比状況、土地被覆状況の把握により都市 環境の解析に有効なデータとなる
VNIR:高分解能 TIR:高分解能
その他 ユーザ要求の多様化に対して、観測自由度の高い、
高度なマヌーバビリティ衛星へ期待
VNIR:高分解能 VNIR:可視近赤外センサ、 TIR:遠赤外センサ
1.3 ニーズまとめ
高度なマヌーバビリティを有する地球観測監視衛星(HiMEOS)の実現により、センサの性 能向上と合わせ、広い地域から選択した場所を定期的に観測監視でき、個別の地域データ をその個別の事情に基づき、その地域や組織の利害の判断や監視に用いることができる。
それによって、衛星からのリモートセンシングデータの利用方法における質的な変化をも たらし、社会の進歩に有用なインフラとして新たなニーズを掘り起こすと考えられる。
想定される HiMEOS は、観測監視ミッションに関して下記の特徴がある。
(1)高分解能センサによる観測監視ニーズへの対応
・従来の我が国の観測衛星に比べて一桁上の分解能による観測。(現時点での一例とし、可 視パンクロ 0.4m 程度、マルチ 1.6m 程度)
・更に熱赤外センサの付加。(上記に付加すれば 6.4m 程度の分解能となる)
(2)軌道マヌーバ(高度変更)による高分解能センサの更なる高分解能活用
・必要に応じて軌道を下げての運用によるズームアップ観測が可能。(高度を半分にする ことにより、分解能の半減が可能となる。例:可視パンクロ 0.4m→0.2m、マルチ 1.6m
→0.8m)
・回帰軌道による運用とし、毎日同一地点の観測監視を行う。(太陽同期軌道をとった場 合には、同一時刻での観測が可能である。また、太陽非同期位相回帰軌道を選択した場合 には、高緯度地域の観測ができなくなるが、軌道傾斜角に応じた範囲内(赤道±軌道傾斜 角の緯度範囲)の重点観測を行うことになり、日本領土や近隣地域、現在の世界の主要都 市、更には生産活動の主要な地域などに特化した観測が可能になる。)
・軌道高度を上下させること(軌道マヌーバ)により飛行軌道の昇交点経度(赤道をクロ スする地上の経度)を変更し、別の地上観測・回帰パターン(異なる直下観測領域:回帰 観測領域)に移行することが可能である。これにより、高分解能観測が可能となる直下目 標観測を一機で必要に応じて実施することができる。位相回帰軌道の場合には、同一目標 地域を複数回観測する軌道を選択することも可能になる。
(3)姿勢マヌーバによる高分解能センサの活用
・観測幅は高分解能センサでは 10km 程度であるが、姿勢マヌーバにより、複数地点・連続 領域を順次観測可能。
・軌道上で同一目標を観測するように姿勢を変化(姿勢マヌーバ)させることにより、目 標のステレオ視や、連続的な立体視データを取得することも可能。
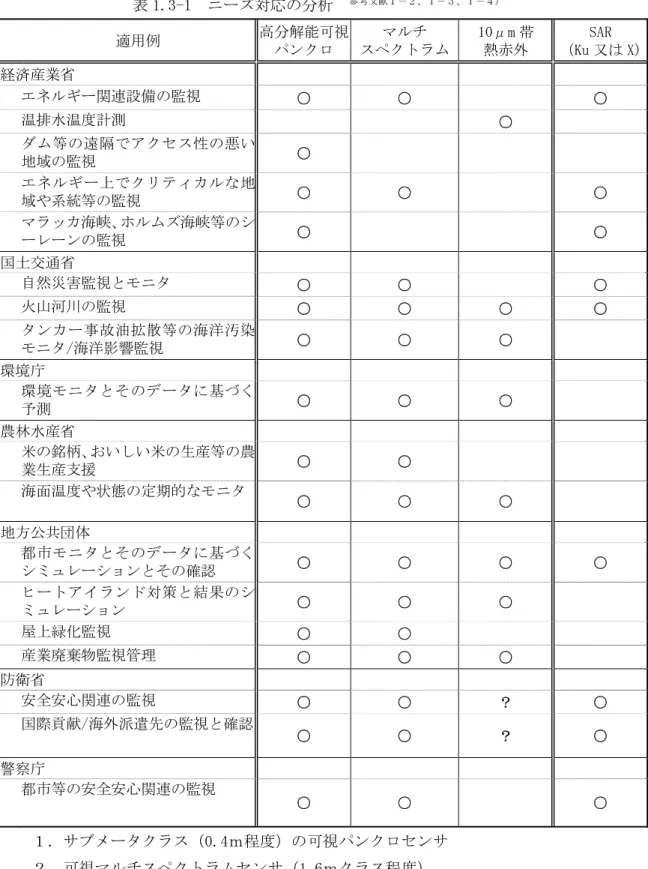
表 1.3-1 にこの HiMEOS の想定するセンサとニーズとの適用性の一例を示す。
表 1.3-1 ニーズ対応の分析 参考文献1-2、1-3、1-4)
適用例 高分解能可視
パンクロ
マルチ スペクトラム
10μm 帯 熱赤外
SAR
(Ku 又は X)
経済産業省
エネルギー関連設備の監視 ○ ○ ○
温排水温度計測 ○
ダム等の遠隔でアクセス性の悪い
地域の監視 ○
エネルギー上でクリティカルな地
域や系統等の監視 ○ ○ ○
マラッカ海峡、ホルムズ海峡等のシ
ーレーンの監視 ○ ○
国土交通省
自然災害監視とモニタ ○ ○ ○
火山河川の監視 ○ ○ ○ ○
タンカー事故油拡散等の海洋汚染
モニタ/海洋影響監視 ○ ○ ○
環境庁
環境モニタとそのデータに基づく
予測 ○ ○ ○
農林水産省
米の銘柄、おいしい米の生産等の農
業生産支援 ○ ○
海面温度や状態の定期的なモニタ
○ ○ ○
地方公共団体
都市モニタとそのデータに基づく
シミュレーションとその確認 ○ ○ ○ ○
ヒートアイランド対策と結果のシ
ミュレーション ○ ○ ○
屋上緑化監視 ○ ○
産業廃棄物監視管理 ○ ○ ○
防衛省
安全安心関連の監視 ○ ○ ? ○
国際貢献/海外派遣先の監視と確認
○ ○ ? ○
警察庁
都市等の安全安心関連の監視
○ ○ ○
1.サブメータクラス(0.4m程度)の可視パンクロセンサ 2.可視マルチスペクトラムセンサ(1.6mクラス程度)
3.熱赤外センサ(8~10μmでの 6.4mクラス)
第2章 技術動向 2.1 観測衛星
2.1.1 観測衛星の動向
(1)米国民間衛星
主に、米国民間会社が、政府需要を主要市場として開発・運用する地球観測衛星とし て、IKONOS、QuickBird、OrbView-3、WorldView1,2、あるいは GEOEYE-1 などを挙げるこ とができる。これらの観測衛星の特徴としては、下記の点を挙げることができる。
・ 比較的小型で、単機能であり、空間分解能の性能向上に焦点を当てた衛星設計と なっている。
・ NGA(国立空間情報局:National Geospatial-Intellignet Agency)といった政府 機関による需要(買上げ)をメインマーケット(固定需要)としている。
この民間高分解能衛星の現状及び今後の動向として、2 つの傾向が伺える。ひとつは、
政府の支援による次世代機の開発をおこなっていることと、併せて、空間分解能の性能 向上を図っている(1m 級から 50cm 級へ)。
¾ Next View プロジェクト(NGA)
☆ QuickBird → WorldView1,2 ☆ OrbView-3 → GEOEYE-1
ユーザ側から要望される観測要求の多様化/即応性や観測頻度向上への対応方法と して、このカテゴリでは以下を挙げることができる。
・ ポインティング機能
¾ 高分解能衛星であるため観測幅が狭く(10~20km 前後)、任意の地点を撮像 するために、ポインティングを行なった上での撮像が基本運用となる。
・ 複数機運用による観測機会向上
¾ 同クラスの衛星を複数同時に運用することにより、単純に観測機会を単体衛 星運用に比べ密にする。
図 2.1.1-1 WorldView-1 図 2.1.1-2 GEOEYE-1
(2)欧州民間衛星
主に、欧州の民間会社が、政府との協力関係(Public Private Partnership)のもと に開発・運用する地球観測衛星として、光学センサを搭載する RapidEye と SAR を搭載 する TerraSAR-X を挙げることができる。
これらの観測衛星の特徴としては、下記の点を挙げることができる。
・ 官民協力ミッション(PPP)である。
¾ RapidEye の場合には、DLR が全体(約 1 億ドル)の 10%を負担
¾ TerraSAR-X の場合には、DLR が全体(1 億 3000 万ユーロ)の 22%を負担
・ 民間需要への期待を持っている。
¾ 米国民間会社が政府買上げを固定需要に位置づけていることに対し、欧州民 間会社は、民間市場での販売への期待・比率が高い。
・ 空間分解能より観測頻度向上にシステムの差別化を図る。
¾ RapidEye の場合には、空間分解能 6.5m で 5 バンドのセンサを搭載した衛星 の 5 機体制(台湾の Argo が参加し実質 6 機体制)である。
¾ TerraSAR の場合には、TerraSAR-X に続いて TanDEM-X を打上げ、2 機体制を 確立し、ほぼ同じ衛星でのタンデム飛行を行なう計画である。
ユーザ側から要望される観測要求の多様化/即応性や観測頻度向上への対応方法と して、このカテゴリでは以下を挙げることができる。
・ 複数機運用による観測機会向上
¾ 上記で述べているが、複数機運用による観測頻度の向上を指向する。
図 2.1.1-3 RapidEye 図 2.1.1-4 TerraSAR-X
(3)マヌーバビリティに関わる特徴的な技術開発
動向分析の結果、観測要求/観測頻度向上に対する対応として、「広観測幅」にて行 なうものは中分解能の政府大型衛星、「複数機運用/回帰軌道の採用による観測機会向 上」はすべてのカテゴリの観測衛星、そして、「ポインティング機能」による対応は、
高分解能の政府大型衛星、米国民間衛星あるいは一部アジア地域衛星という整理が可能 である。このような状況下で、マヌーバビリティの向上は第 4 の選択肢となりうる可能 性がある。
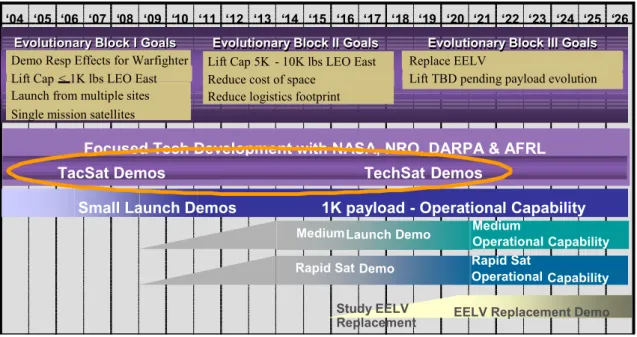
米国防総省における宇宙利用に対する要求が近年議論されているが、その根本にある のが、即応性に難があるという点である。これは、これまでの大国同士の戦争・紛争で はなく、21 世紀型危機管理(非対称戦)に対応できないという危機感に基づくものであ る。そこで、DOD/DARPA では、Operationally Responsive Space (ORS)構想を発表した
(図 2.1.1-5)。これは次のコンセプトに基づくものである。参考文献 2-1)
開発タイムラインを年単位から月単位へ
配置タイムラインを月単位から日単位へ
運用タイムラインを連続(もしくは秒単位)へ 8
このコンセプトの実現のためには、輸送の低コスト化と衛星の軌道上配置の効率化が 必須との理解のもと、具体的なプロジェクトが進行している。
‘04 ‘05 ‘06 ‘07 ‘08 ‘09 ‘10 ‘11 ‘12 ‘13 ‘14 ‘15 ‘16 ‘17 ‘18 ‘19 ‘20 ‘21 ‘22 ‘23 ‘24 ‘25 ‘26
Focused Tech Development with NASA, NRO, DARPA & AFRL
Evolutionary Block I Goals Evolutionary Block I Goals
Reduce logistics footprint Reduce cost of space
Lift Cap 5K - 10K lbs LEO East
Lift TBD pending payload evolution Replace EELV
Rapid Sat Demo
TacSat Demos
Single mission satellites Launch from multiple sites Lift Cap < 1K lbs LEO East Demo Resp Effects for Warfighter
1K payload - Operational Capability Small Launch Demos
TechSat Demos
Rapid Sat Operational Capability Evolutionary Block II Goals
Evolutionary Block II Goals Evolutionary Block III GoalsEvolutionary Block III Goals
Study EELV Replacement Medium
Launch Demo
Medium Operational Capability
EELV Replacement Demo
‘04 ‘05 ‘06 ‘07 ‘08 ‘09 ‘10 ‘11 ‘12 ‘13 ‘14 ‘15 ‘16 ‘17 ‘18 ‘19 ‘20 ‘21 ‘22 ‘23 ‘24 ‘25 ‘26
Focused Tech Development with NASA, NRO, DARPA & AFRL
Evolutionary Block I Goals
Reduce logistics footprint Reduce cost of space
Lift Cap 5K - 10K lbs LEO East
Lift TBD pending payload evolution Replace EELV
Lift TBD pending payload evolution Replace EELV
Rapid Sat Demo
TacSat Demos
Single mission satellites Launch from multiple sites Lift Cap < 1K lbs LEO East Demo Resp Effects for Warfighter
1K payload - Operational Capability Small Launch Demos
TechSat Demos
Rapid Sat Operational Evolutionary Block II Goals
Evolutionary Block II Goals Evolutionary Block III GoalsEvolutionary Block III Goals
Study EELV Replacement
MediumLaunch Demo Medium Operational
EELV Replacement Demo Capability Capability Evolutionary Block I Goals
図 2.1.1-5 Operationally Responsive Space (ORS)
2.1.2 まとめ
現状の観測衛星の技術動向としては、観測要求/観測頻度向上に対する対応は大きく、
広観測幅、複数機運用、回帰軌道の採用による観測機会向上、ポインティング機能の 4 つ に分けられた。それぞれの得失を整理・分析し、HiMEOS の有する高度なマヌーバビリティ との比較を行う。
表 2.1.2-1 まとめ
機能オプション HiMEOS 優位点 欠点
広観測幅 × ・同一条件による広域観測 ・データ量の増大 複数機運用 △ ・高頻度観測
・冗長系の確保
・ミッション運用の複雑化
・開発・運用コストの増加 回帰日数が
短期間の軌道
○ ・単一衛星による高頻度観 測
・特定地域のみの観測 (全球観測は困難)
ポインティング 機能
(衛星本体を含 む)
○ ・単一衛星による高頻度観 測
・緊急時の即応性
・全球観測の実現 (ポインティングを行わ ないと全球観測が行えな い軌道・センサの場合)
・画像の歪増加
・衛星可動部の増加
軌道変更 ○ ・軌道高度の変更 (空間分解能の可変)
・直下視観測の増加
・全球観測の実現 (軌道変更を行わないと 全球観測が行えない軌 道・センサの場合)
・燃料搭載量の増加
・軌道変更完了までの時間 ロス
注 △:将来的なプロジェクトの継続により達成可能
2.2 センサ動向 2.2.1 光学センサ
近年、世界各国で低軌道に高分解能光学センサ搭載の観測衛星が、多数打上げられ、ま た計画されている。
現状では米国の商用衛星に代表されるように、地表サンプリング長(GSD)が 0.5~1m の パンクロマチックバンドと GSD がその 4 倍程度のマルチバンド(4 バンド程度)の光学セン サが圧倒的に多いことがわかる。
今後打上げが計画されているセンサでは更に分解能を向上させる方向と、Worldview では マルチバンドの波長帯を増加して、農業分野(Red-Edge)や海岸線(Coastal)等での観測 能力を向上させる方向、更には、多数の観測バンドによって、対象の詳細な質の分類を行 なえる可能性が高いハイパースペクトルセンサの方向が見て取れる。
以上の海外の現状を踏まえ、今回検討する光学センサの分解能はパンクロマチック 0.4 m、マルチはその 4 倍の 1.6mと設定した。また、赤外を追加する場合には、回折現象によ って分解能が波長に比例することから、赤外分解能はパンクロマチックの約 16 倍程度の寸 法になり、6.4mと設定することが妥当と考えられる。赤外の波長域は大気の窓及び検出器 技術の実現の容易性を考慮して 8~10μm 程度を想定している。
2.2.2 合成開口レーダ
SAR(Synthetic Aperture Radar)に関しても、カナダやヨーロッパでの商用化も含めて、
急速に開発が進められており、各種の SAR での観測データ取得の期待が持てるようになっ てきている。SAR に関しては、全天候性である上、夜間の観測も可能なことから、災害監視 や火山の噴火等の多くの分野での利用が期待されている。
観測の目的によって使用される波長が異なり、使われる技術も異なる。
周波数としては、その目的に応じて異なる周波数の C、L、X の各波長が使い分けられて いる。各波長帯は種々の目的で用いられているが、例えば、L バンドは植物を通して土壌ま で電波が達することから、地形の計測に適しているといわれている。また、C バンドは海上 の観測等に多く使われ、X バンドは高分解能や人工構造物の観測等に適している等の特徴が ある。また、周波数の他に、異なる時期のデータを比較することによって微妙な変化を抽 出するインタフェロメトリ技術や、各種偏波の組合せを使うポラリメトリ技術によって、
物体の識別能力を向上させる等各種のデータ処理技術によって、その有効性が大幅に向上 しつつある。
また、一方、SAR-Lupe に見られるように観測モードを Stripmap 及び Spotlight モードに する等、機能を絞ることによってセンサを小型化する傾向も出てきており、今後の SAR の
2.3 観測データ通信、伝送方式の技術動向 2.3.1 観測データ通信、伝送方式
対象とした衛星の観測データの通信、伝送方式の調査結果を表 2.3.1-1 に示し、以下に 技術動向についての考察を記述する。
(1)伝送する観測データのビットレート、信号処理
表 2.3.1-1 の調査結果サマリーに示すように、観測データの伝送速度(ビットレート)
は、最大で 800Mbps であった。
更に、観測データの伝送速度(ビットレート)は、高速化の傾向にあることが伺える。
観測データを地球局に伝送する方式の詳細は不明ではあるが、観測データを地球局に 直接伝送する場合は、できる限り高速伝送により、短時間に観測データを伝送する方式 が、主流の傾向と考えられる。
また、観測データの伝送用の通信系では、送信機の送信電力を低下させ、消費電力、
発生熱量を抑えることを可能とする、データ圧縮、符号化(RS符号又はRS符号と畳 み込み符号を組み合わせた連接符号)の信号処理が実施されている。
更に、高速データ伝送を所定の送信電力で実現するために、高利得アンテナを用いた 通信系構成とする傾向がある。
(2)変調方式
変調方式は、衛星の電力消費の制限の観点から、QPSK変調方式が採用されている。
しかし、観測データの伝送速度は、高速化の傾向にあり、衛星のリソースの要求を満 たしつつ、大出力の電力増幅器や地球局を指向する高利得ビームアンテナを搭載するな どの工夫により、帯域の拡大を抑制する変調方式の採用(16QAM等)も視野に入れ ておくことが必要と考える。
2.3.2 通信系の使用周波数帯
通信系で使用する周波数帯は、地球局に直接観測データを伝送する場合(直接伝送)
の使用周波数帯は、主にXバンドであり、場合によっては伝送速度を下げて、Sバンド を併用している。 今後の需要(衛星を利用した防災・災害監視等)によっては、観測 データの即時配信が必要となるケースも想定されると考えており、Kバンド帯への移行 を視野に入れる必要があると考える。
現在の周波数利用の割当と、各周波数割当を使用した場合の最大の伝送可能なデータ レート(帯域)を表 2.3.2-1 に示す。地球局へのデータダウンリンクに利用可能な周波 数帯としては、Xバンド(8GHz 帯)、Ku バンド(10~18GHz 帯)、Kバンド(18~27GHz 帯)及びKaバンド(27~40GHz 帯)により、高速データ伝送が可能と考える。
表 2.3.1-1 地球環境観測ミッション衛星(光学センサ)の観測データの通信、伝送方式の技術動向(1/2)
通信方式 観測データの信号処理
衛星 伝送回線 使用周波数帯 変調方式 データレート データ圧縮 符号化 備考
QuickBird-2 直接伝送 X_band 1波 QPSK* 320Mbps 有* 有* SPOT-5 直接伝送 X_band 2波 QPSK 50Mbps/搬送波 有 有* OrbView3 直接伝送 X_band 1波 QPSK* 150Mbps 有* 有*
FORMOSAT2 直接伝送 X_band 1波 QPSK* 320Mbps 有* ? ハイゲインアンテナ使用 Resurs-DK1 直接伝送 X_band 1波 QPSK* 300Mbps 有* ? ハイゲインアンテナ使用 CARTOSAT-1 直接伝送 X_band 1波 QPSK* 約 33Mbps 有(JPEG) 有*
TopSat 直接伝送 X_band 1波 QPSK 11Mbps 有* 有*
KOMPSAT-2 直接伝送 X_band 1波 QPSK 320Mbps 有* ? ハイゲインアンテナ使用,リアル&リプロ MACSAGT 直接伝送 X_band 1波 QPSK* 30Mbps 有* 有*
EROS B 直接伝送 X_band 1波 QPSK* 280Mbps
(455Mbps@C) 有* ? 2軸シンバル制御ハイゲインアンテナ使用 RapidEye1~5 直接伝送 X_band 1波 QPSK* 80Mbps 有* 有*
直接伝送 X_band 1波 QPSK 120Mbps 有 連接符号 ALOS
中継伝送 Ka_band 1波 QPSK 240Mbps 有 連接符号 静止軌道上のデータ中継衛星を 介して伝送
WarldView-1,2 直接伝送 X_band 1*波 QPSK* 800Mbps 有* ? ハイゲインアンテナ使用(地球局指向*) GeoEye-1 直接伝送 X_band 1波 QPSK* 280Mbps 有* ? ハイゲインアンテナ使用(フェーズドアレー*) Pleiades1,2 直接伝送 X_band 1*波 QPSK* 450Mbps 有* ? ハイゲインアンテナ使用
注 1:*は、推定を示す
表 2.3.1-1 地球環境観測ミッション衛星(SAR)の観測データの通信、伝送方式の技術動向(2/2)
通信方式 伝送方式
衛星 伝送回線 使用周波数帯 変調方式 データレート データ圧縮 符号化 備考
SAR-Lupe 直接伝送 X_band 1波 ? ? ? ?
Cosmo-SkyMed 直接伝送 X_band 2波 QPSK* 150Mbps/搬送波 有* 有* リアル:150Mbps,リプロ:150Mbps RADARSAT-2 直接伝送 X_band 2波 QPSK* 105Mbps/搬送波 有 有* リアル:105Mbps,リプロ:105Mbps TerraSar 直接伝送 X_band 1波 QPSK* 300Mbps 有 ? ハイゲインアンテナ使用(地球局指向*) TanDEM-X 直接伝送 X_band 1波 QPSK* 2*500Gbps/day 有 ? ハイゲインアンテナ使用(地球局指向?)
直接伝送 X_band 2波 QPSK* 2*100Mbps? ? ? ハイゲインアンテナ使用(地球局指向*) Envisat
中継伝送 Ka_band 1波 QPSK* 200Mbps? ? ? 静止軌道上のデータ中継衛星を 介して伝送
Metror-3M 直接伝送 X_band 1波 QPSK* 15~123Mbps ? 有* 注 1:*は、推定を示す
表 2.3.2-1 現在の周波数利用の割当と、各周波数割当を使用した場合の最大の伝送可能なデータレート
№ 割当業務 周波数帯 取得可能な帯域幅
(予測) 備 考
1 地球探査衛星
(宇宙から地球)
8025MHz~8400MHz
(Xバンド) 約 300MHz 以上 日本の衛星の使用実績は、QPSK変調で約 140Mbps 程度 2 宇宙研究
(宇宙から地球)
12750MHz~12950MHz
(Kuバンド) 約 200MHz 以下 周波数範囲が 200MHz しかないので、この範囲の全帯域が確保出来た場 合で、QPSK で約 200Mbps 程度
3 宇宙研究
(宇宙から地球)
25500MHz~27000MHz
(Kバンド) 約 800MHz 以下 QPSK 変調で約 800Mbps 程度可能であるが、 500Mbps 程度が現実的で ある。
4 宇宙研究
(宇宙から地球)
37000MHz~38000MHz
(Ka バンド) 約 1000MHz 以下 QPSK 変調で約 800Mbps 程度可能であるが、 500Mbps 程度が現実的で ある。但し、約 1000Mbps を確保できる可能性あり。
2.4 運用管制システムの現状
2.4.1 各国追跡ネットワーク(地上局)の現状
(1)国内機関の追跡ネットワークの現状 a. JAXA 追跡ネットワーク参考文献 2-2)
国内(7 局)及び国外(4 局)の受信局設備と、静止軌道上の中継衛星(DRTS:Data Relay Test Satellite)により構成される。
図 2.4.1-1 にJAXA追跡ネットワークの配置図を示す。また 表 2.4.1-1 JAXA追跡ネット ワーク各局の設備概要にS、Xバンド受信設備の情報を示す。また、図 2.4.1-2 にJAXA追跡 ネットワーク利用イメージを示す。
JAXA 追跡ネットワークは、これまでも、財団法人 無人宇宙実験システム研究開発機構 で担当してきた USERS/SERVIS の運用で利用している。HiMEOS 衛星運用でも、特にクリテ ィカル運用フェーズでは、重要な役割を果すと考えられる。
図 2.4.1-1 JAXA 追跡ネットワーク 配置図 表 2.4.1-1 JAXA 追跡ネットワーク各局の設備概要
名称 所在地 アンテナ CMD Band TLM Band TRK 備考
勝浦 千葉 KTU ○ S ○ S ○
増田 鹿児島 MSD ○ S ○ S ○
沖縄 沖縄 OKN ○ S ○ S ○
Santiago Chile SNT ○ S ○ S ○ Maspalomas Spain MSP ○ S ○ S ○ Perth Australia PRT ○ S ○ S ○ Kiruna Sweden KRN ○ S ○ S ○
鳩山 埼玉 10m-1 ○ X
10m-2 ○ X
11.5m ○ X
13m ○ Ka DRTS用
臼田 長野 UDSC 64m ○ S/X ○ S/X ○ 深宇宙用 内之浦 鹿児島 USC 34m ○ S/X ○ S/X ○ Az 5Deg/Sec
USC 20m ○ S ○ S/X ○
Usuda Deep Space Center
DRTS
External User
Explorers
Science Satellites
Com/Navi Satellites
Earth Observation Satellites
S/X Band S/X Band
S/X Band
S (/X)
S(/X)
S Band S(/X) Band
Ka Band
Uchinoura
Space Center New GN
Hatoyama feederlink
(SN)
Ka/S Band
X Band S(/X) Band Ka/S Band
Network Control
(SSOC)
SLE connection
(CY2006)
Sat. Control Sat. Control Sat. Control Sat. Control
・・・・・
・・・・ ・・・・
Sat. Control
S(/X)
JEM
Network Control Flight Dynamics
ISAS-SLE NASDA-SLE
Former-ISAS Former-NASDA
Hatoyama
Hatoyama
(EOC)
S/X Band
Obs data
CMD,TLM RNG
X Band
Tsukuba feederlink
(SN)
(2)NASA 追跡ネットワークの現状 参考文献2-3)
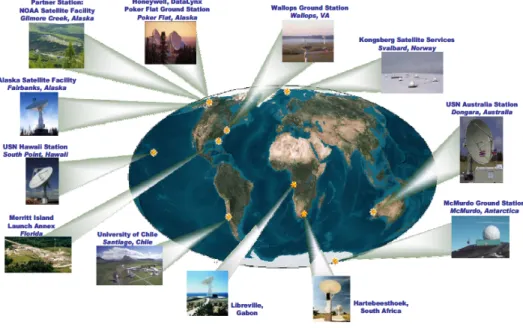
a. NASA/GN(near earth Ground Network)の現状
NASA/GNの現状配置を 図 2.4.1-3 に、NASA/GN各局の概要を 表 2.4.1-2 に示す。
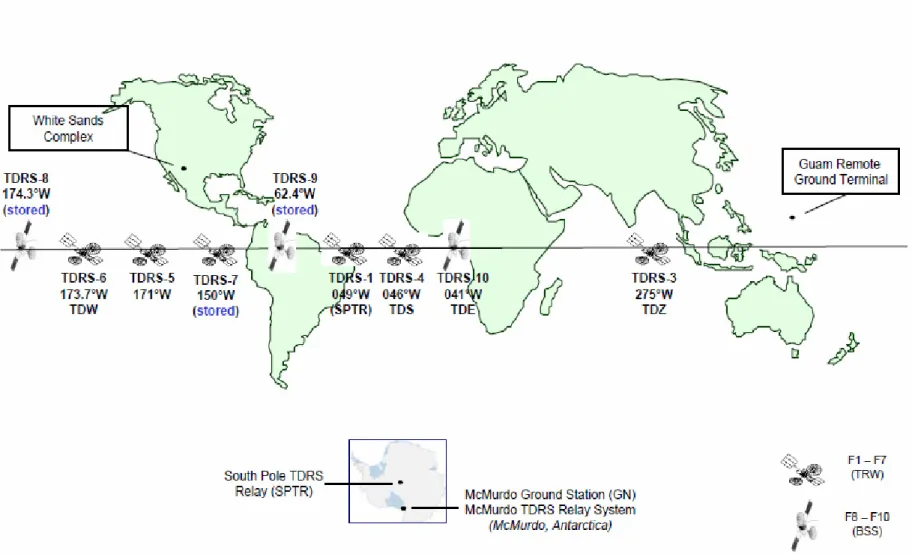
NASA/SPN(SPace Network :DRTS衛星)の配置を 図 2.4.1-4 に示す。
図 2.4.1-3 NASA/GN の配置 表 2.4.1-2 NASA/GN 各局の設備概要
名称 所在地 アンテナ CMD Band TLM Band TRK 備考
Alaska Ground Station Poker Flat,Alaska PF2 11m ○ ○ S/X ○
(DataLynx) PF1 7.3m ○ ○ S/X ○
AGS 11m ○ ○ S/X ○
AGS 5m ○ ○ S
Kongsberg Satellite Services Svalbard,Norway SG1 11m ○ ○ S/X ○
(KSAT) SG2 11m ○ ○ S/X ○
SG3 13m ○ ○ S/X ○
SG4 13m ○ ○ S/X
Alaska Satellite Facility Fairbanks,Alaska ASF 11m ○ S/X
(University Of Alaska) ASF 10m ○ X
NOAA Satellite Facility Gilmore Creek,Alaska GLA 13m ○ ○ S/X
GLB 13m ○ ○ S/X
GLC 13m ○ ○ S/X
Universal Space Network North Pole,Alaska AK 13m ○ ○ S/X ○ (USN) South Point,Hawaii HI 13m ○ ○ S/X ○ Dongara,Australia AUS 13m ○ ○ S/X ○ Wallops Ground Station Virginia WGS 11m ○ ○ S/X ○
WGS 5m ○ ○ S
Merritt Island Launch Annex Florida MILA 9m1 ○ ○ S/X ○
MILA 9m2 ○ ○ S/X ○
University Of Chile Santiago,Chile AGO 9m ○ ○ S ○ Satellite Applications Center Hartbeesthoek,Africa HBK ○ ○ S/X ○
図 2.4.1-4 NASA/SPN(DRTS 衛星)の配置
(3)ESA 追跡ネットワークの現状 参考文献 2-4)
ESA(欧州宇宙機関)は追跡ネットワークとして ESA Ground Station Network(以下 ESA/GN)
を持つ。
ESA/GN は ESA 所有施設、商用施設+大学設備、他相互協力宇宙機関設備からなる。
ESA/GNの配置図を 図 2.4.1-5 に示す。ESA/GN各局の概要を 表 2.4.1-3 に示す。
図 2.4.1-5 ESA/GN の配置
表 2.4.1-3 ESA/GN(core)各局の設備概要
.
. .
. . ..
.
.
ESOC (D)
KIRUNA-1 (S) KIRUNA-2
REDU (B) CEBREROS VILLAFRANCA 1 VILLAFRANCA 2
TS-1 (E) MASPALOMAS (E)
KOUROU (F-GUY)
MALINDI (K)
PERTH (AUS) NEW NORCIA (AUS) SANTIAGO (CHILI)
.
SVALBARD (N)
.
GOLDSTONE (USA)
•
POKER-FLAT (USA)
•
KERGUELEN(F)
•
HBK(SOUTH-AFRICA)
•
MASUDA(JAPAN) USUDA
•
SOUTH POINT (HAWAII)
•
CANBERRA
xxx Core ESA Network
Augmented ESA Network Cooperative ESA Network xxx
xxx
WEILHEIM (D)
.
.
. .
. . ..
.
.
ESOC (D)
KIRUNA-1 (S) KIRUNA-2
REDU (B) CEBREROS VILLAFRANCA 1 VILLAFRANCA 2
TS-1 (E) MASPALOMAS (E)
KOUROU (F-GUY)
MALINDI (K)
PERTH (AUS) NEW NORCIA (AUS) SANTIAGO (CHILI)
.
SVALBARD (N)
.
GOLDSTONE (USA)
•
POKER-FLAT (USA)
•
KERGUELEN(F)
•
HBK(SOUTH-AFRICA)
•
MASUDA(JAPAN) USUDA
•
SOUTH POINT (HAWAII)
•
CANBERRA
xxx Core ESA Network
Augmented ESA Network Cooperative ESA Network xxx
xxx
WEILHEIM (D)
.
名称 所在地 アンテナ CMD Band TLM Band TRK 備考
Cebreros Avila,Spain 35m ○ X ○ X/Ka ○
Maspalomas Canary Island,Spain15m ○ S ○ S/X ○ Perth Western Australia 15m ○ S/X ○ S/X ○
Kiruna Sweden 15m ○ S ○ S/X ○
13m ○ S ○ S/X ○
Redu Belgium 15m ○ S ○ S ○
2.5m ○ S ○ S
9m ○ S ○ S
3.8m ○ ○ Ku
9.3m ○ ○ C
13.5m ○ ○ Ka
Villafrana Madrid,Spain VIL-1 15m ○ S ○ S ○ VIL-2 15m ○ S/X ○ S/X ○ VIL-3 12m ○ X/Ka ○ X/Ka
データ提供 2.4.2 各国衛星運用システムの現状
(1)JAXA 衛星運用管制システムの現状
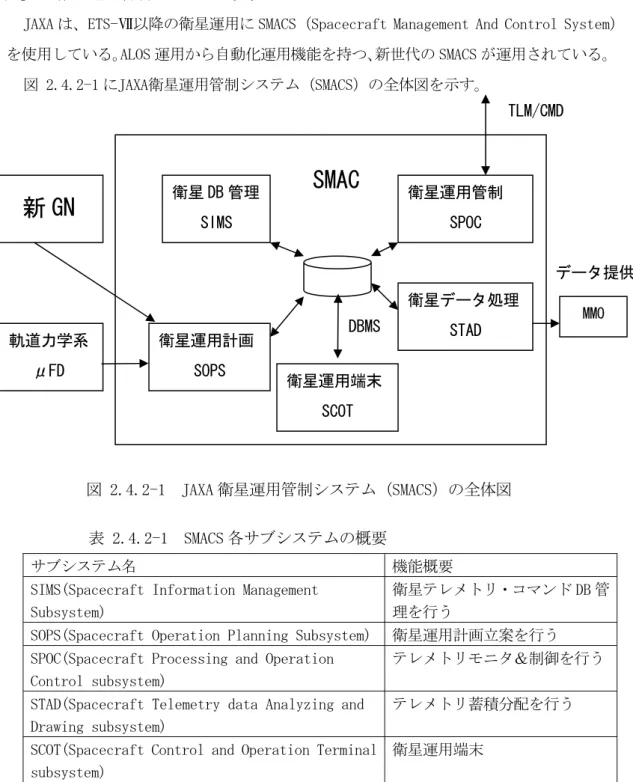
JAXA は、ETS-Ⅶ以降の衛星運用に SMACS(Spacecraft Management And Control System)
を使用している。ALOS 運用から自動化運用機能を持つ、新世代の SMACS が運用されている。
図 2.4.2-1 にJAXA衛星運用管制システム(SMACS)の全体図を示す。
図 2.4.2-1 JAXA 衛星運用管制システム(SMACS)の全体図 表 2.4.2-1 SMACS 各サブシステムの概要
サブシステム名 機能概要
SIMS(Spacecraft Information Management Subsystem)
衛星テレメトリ・コマンド DB 管 理を行う
SOPS(Spacecraft Operation Planning Subsystem) 衛星運用計画立案を行う SPOC(Spacecraft Processing and Operation
Control subsystem)
テレメトリモニタ&制御を行う STAD(Spacecraft Telemetry data Analyzing and
Drawing subsystem)
テレメトリ蓄積分配を行う SCOT(Spacecraft Control and Operation Terminal
subsystem)
衛星運用端末 DBMS:Data Base Management System(データベース管理システム)
MMO:Mission Management and Operation System DBMS 衛星 DB 管理
SIMS
衛星運用管制 SPOC
衛星運用計画 SOPS
衛星データ処理 STAD
衛星運用端末 SCOT
TLM/CMD
軌道力学系 μFD
新 GN
MMO
SMAC
2.4.3 分析とまとめ
(1)運用管制システムの動向 参考文献 2-5)~2-30)
a.局の運用自動化の動向
すでに各機関の局設備の運用センターからのリモート制御は実用化されており、地上局 処理の自動化は技術的には確立していると判断した。また、各設備の相互利用の自動化の 前提として CCSDS SLE(宇宙データシステム諮問委員会(CCSDS)の勧告による宇宙拡張リ ンク:Space Link Extintion)が導入されており、局運用計画が調整済みであれば、機関 間(たとえば、USEF から JAXA 局を利用する場合)で、自動的に可視パス運用ができる状況 となっている。
事前の運用計画の調整については、JAXA では自動化は未実施の状態であるが、ESA では Network Interface System(NIS)、ESTRACK Management System(EMS)という機能を追加 することにより局利用計画段階からの自動化を推進している。現段階で NIS は開発完了
(2006 年第二四半期)、計画情報では EMS(2008 年第一四半期)が開発中である。
機関間の局利用時、パス運用を自動化するためには、最低限 CCSDS SLE を導入し、機関 間サービスを利用することが必要であることが確認できた。
b. SM&C(Satellite Monitor&Control)の自動化/自律化の動向
ESAでは前記NIS、EMSと連動して、パス中の運用の自動化を実現するためにMission Automation System(MATIS)、Service Management Framework(SMF)という機能を提供し、
自動化を実現する。MATISはスケジュール、イベント駆動のプロシージャの実行を実現する 仕組みである。SMFは様々な機能を利用する場合に機能の物理的な配置情報を利用者(自動 化なので実際はソフトウェア)に教える電話帳のような役割を果たす仕組みである。図 2.4.3-1 にNIS、EMS、MATIS、SMFの関係を示す。図 2.4.3-2 に示すプロシージャ作成ツー ルMOISにより自動運用プロシージャを準備する。
NASA においても同様な仕組み(プロシージャ)により処理自動化を進めている。
○の部分が前記記述で説明したものである。
MPS
SMF
Status Messages
NIS MAS
EMS STC
FDS
G/S
MCS
Predicts and Radiometric data Mission Planning Data
TM and TC Data Ground Resource
Planning Data
TM and TC Control System Monitoring and Data
Control Data + SCTS and SCPS
Service Instance Configuration Files
(SICF
TM and TC Data
OPS
DefinitionsControl System and G/S Link Monitoring and Control Data + SCTS SCPS and MAPS +
Status Messages
G/S Link Monitoring and Control Data
MPS MPS
SMF SMF
Status Messages S/C Timeline Schedule
S/C Pass Schedule Mission Automation Planned Schedule (MAPS)
NIS NIS MAS
MATIS
EMS STC STC
FDS
G/S G/S
MCS
MCS
TM and TCData Ground Resource
Planning Data
TM and TC Control System Monitoring and Data
Control Data + SCTS and SCPS
Configuration Files (SICF)
Service Instance Configuration Files
(SICF)
TM and TC Data
OPS
OPS
ProcedureControl System and G/S Link Monitoring and Control Data + SCTS、
SCPS and MAPS + Status Messages
G/S Link Monitoring and
Ground/Station
Service Instance G/S Schedules (GRSS)
and Control Data Monitoring
図 2.4.3-2 プロシージャ作成ツールMOIS
MOIS
Executor
Validator
TCs TMs
Execution Execution
FDE
Scheduler HMI
GSA SORs
MUST Interface
Internet
MUST
Status &Logging
Web Server
Spacecraft
TM TC
S2K
Interface MCS Simulator
SCOS 2000
Test Harness
Procedures MOIS Library
MOIS Writer
TM TC