www.furuno.com
スマート GPS
型式
PT-G1
プロトコル仕様書
(Document No. SE17-600-021-00)
IMPORTANT NOTICE
本書に記載された内容を発行元(古野電気株式会社)の書面による許可なく複写、複製、転載および第三者へ開示 することを禁止します。
FURUNO ELECTRIC CO., LTD. All rights reserved. 記載の製品、仕様は予告なく変更することがあります。 本書に記載されている社名、製品名は、一般に各開発メーカーの登録商標または商標です。 GPS(米国)、GLONASS(ロシア)、Galileo(欧州)、QZSS(日本)、SBAS(WAAS(米国)、EGNOS(欧州)、MSAS (日本))はそれぞれを所持する国が管理・運用するシステムです。それらの運用によっては、測位性能が著しく劣化 することがあります。本仕様書に記載されている事項は、上記の場合を含めて保証したものではありません。これら の利用にあたっては、本システムの特性を十分理解し、使用者の責任においてその利益を活用することが必要です。
改訂歴
Version 改訂内容 Date
目次
1 概要 ··· 1 1.1 インターフェイス ··· 1 2 適用範囲 ··· 1 3 通信仕様 ··· 2 4 NMEAセンテンスフォーマット ··· 3 4.1 標準センテンス ··· 3 4.2 専用センテンス ··· 4 5 受信機のステート ··· 5 6 バックアップデータ ··· 8 7 送受信シーケンス ··· 9 7.1 起動直後 ··· 9 7.2 測位停止ステートから測位動作ステートに遷移時 ··· 10 7.3 周期的に出力するセンテンス(デフォルト設定時) ··· 11 7.4 受信機の設定変更時 ··· 12 7.5 受信機データの出力要求 ··· 14 7.6 シリアル通信設定の変更 ··· 15 7.7 測位停止 ··· 15 7.8 電源OFF ··· 16 8 NMEAセンテンスの受信について ··· 17 8.1 データ受信 ··· 17 8.2 センテンス切り出し ··· 17 8.3 測位回毎のセンテンス切り出し ··· 17 8.4 センテンス毎のデータ切り出し ··· 17 8.5 Talker ID ··· 18 8.6 衛星番号 ··· 18 8.7 時刻 ··· 18 8.8 測位ステータス ··· 18 8.9 GNSS未測位でも測位が有効になるケース ··· 19 8.10 方位 ··· 19 9 標準NMEA出力 ··· 209.1 GBS – GNSS Satellite Fault Detection ··· 20
9.2 GGA – Global Positioning System Fix Data ··· 21
9.3 GLL – Geographic Position - Latitude/Longitude ··· 22
9.4 GNS – GNSS Fix Data ··· 23
9.5 GSA – GPS DOP and Active Satellites ··· 24
9.6 GST – GNSS Pseudo Range Error Statistics ··· 25
9.7 GSV – Satellites in View ··· 26
9.8 RMC – Recommended Minimum Navigation Information ··· 27
9.9 VTG – Course Over Ground & Ground Speed ··· 28
10.3.1 GPIO – アンテナ接続状態の出力要求 ··· 34
10.3.2 VERSION – ソフトウェアバージョンの出力要求 ··· 34
11 Dead Reckoning用入力センテンス ··· 35
11.1 API – eRide GNSS Core Library Interface ··· 35
11.1.1 ODOREVERSE – バック信号の設定 ··· 35 11.2 SYS – システム設定 ··· 35 11.2.1 DRPERSEC – DR測位の更新周期設定 ··· 35 12 専用NMEA出力 ··· 36 12.1 ACK – コマンド受信確認出力 ··· 36 12.2 CFG – PERDCFG入力コマンドの返答 ··· 36 12.2.1 ADDON ··· 36 12.3 SYS – PERDSYS入力コマンドの返答 ··· 37
12.3.1 FIXSESSION – GNSS Session Query ··· 37
12.3.2 GPIO – アンテナ接続状態の出力 ··· 38 12.3.3 VERSION – バージョン出力 ··· 38 13 Dead Reckoning用出力センテンス ··· 39 13.1 CRD – DR測位結果のデータ ··· 39 13.1.1 PERDCRD,I – 補正後の慣性センサデータ ··· 39 13.1.2 PERDCRD,R – 慣性センサDR測位結果 ··· 40 13.2 CRI – 慣性センサデータとセンサパラメータ ··· 41 13.2.1 PERDCRI,A – 加速度センサデータ ··· 41 13.2.2 PERDCRI,G – ジャイロセンサデータ··· 42 13.2.3 PERDCRI,O – 車速パルスデータ ··· 43
1 概要
本書は、スマート GPS [型式 PT-G1]の通信プロトコルについて記載します。 PT-G1 は、GNSS 測位情報とユニットに内蔵されたジャイロセンサ、加速度センサ、温度センサ、外部入力の車速 パルス/バック信号を基に、より正確な測位情報を提供することができます。また、GNSS 信号中断中においても測位 を継続することが可能です。 - ジャイロセンサとは、物体の角速度を検出するセンサです。1 - 加速度センサとは、物体の加速度を検出するセンサです。1 - 車速パルスとは、車両の速度に応じて出力されるパルスです。 - バック信号とは、車両の進行方向を示す信号です。 - 温度センサとは、現在の温度もしくは温度の変化量を検出するセンサです。1.1 インターフェイス
PT-G1 は、USB 通信ポートを通して、測位結果の出力や、受信機への制御情報の入力を実施します。2 適用範囲
対応するソフトウェアのバージョンは ENP653O 以降です。2
3 通信仕様
本受信機で使用する通信方式は表 3.1 の通りです。 表 3.1 通信仕様 通信ポート USB 通信ポート 通信仕様 全二重 調歩同期式(無手順) 転送速度2 4,800 bps 9,600 bps 19,200 bps 38,400 bps 57,600 bps 115,200 bps (Default) 230,400 bps データ長2 8 bit ストップビット2 1 bit パリティ2 なし 出力周期 1000 ms (1 Hz) (デフォルト設定)3 500 ms (2 Hz) 200 ms (5 Hz) 100 ms (10 Hz)信号コード形式 NMEA-0183 Ver. 4.10 データ準拠 ASCII コード4
通信内容 入力データ NMEA Proprietary センテンス 出力データ NMEA 標準センテンス NMEA Proprietary センテンス 2 設定により変更可能です。設定方法は 10.2.3 項を参照ください。 3 設定により変更可能です。設定方法は 11.2.1 項を参照ください。
4 “NMEA 0183 STANDARD FOR INTERFACING MARINE ELECTRONIC DEVICES Version 4.10” (NATIONAL
4 NMEA センテンスフォーマット
4.1 標準センテンス
$ <アドレスフィールド> , <データフィールド> ・・・ *<チェックサム> <CR> <LF> 5 バイト "$" センテンスの開始を表します。 <アドレスフィールド> 5 バイトの固定長です。 初めの 2 バイトは、トーカ(talker、発信者)ID を表し、GP は GPS、GN は GNSS、GL は GLONASS を表しています。 標準 NMEA センテンスの Talker ID を表 4.1 に示します。 続く 3 バイトは、センテンスフォーマットでデータの種類を表しています。 表 4.1 標準NMEAセンテンスのTalker ID 標準 NMEA センテンスの種類 Talker ID RMC 位置・測位時刻・速度・方位 GN GNS GNSS 測位データ GN GGA 位置・測位時刻等 GN GLL 位置、測位時刻 GN VTG 速度、方位 GN GST 誤差楕円、精度指標 GN GBS 異常衛星検出 GN GSA 測位状態、測位使用衛星、DOP GN/GP/GL5 ZDA 現在日時等 GN GSV 衛星情報(GPS、SBAS、QZSS) GP 衛星情報(GLONASS) GL <データフィールド> 主に可変長であり、必ずデリミタ","で区切られます。 有効なデータ文字は"!","$","*","¥","^"を除いた ASCII 文字コード 0x20(スペース)~0x7D("}")の全ての文字です。 該当するデータがない場合は、ヌルフィールドで表します。 <チェックサムフィールド> "$"の次のデータから"*"の前のデータまでの全てのデータを、8 ビット全てにつき XOR(排他的論理和)をとり、その結 果を 2 バイトのアスキーキャラクタに変換します。 <CR><LF> センテンスの終了を表します。4
4.2 専用センテンス
チェックサムを含む入力コマンド内のアルファベットは、全て大文字です。 $ P <メーカーコード> <センテンスタイプ> , <データフィールド> ・・・ *<チェックサム> <CR> <LF> 3 バイト 3 バイト "$" センテンスの開始を表します。 "P"Proprietary Sentence ID。専用センテンスであることを表します。
<メーカーコード> メーカーを示すコードです。"ERD"となっています。 <センテンスタイプ> センテンスのタイプを示します。”API”クラス、”CFG”クラス、”SYS”クラスがあります。表 4.2 に示す動作を行った時に、 各コマンドによる設定はデフォルトに戻ります。 表 4.2 デフォルト設定に戻る動作 コマンドの種類
動作 $PERDAPI $PERDCFG $PERDSYS
電源 ON/OFF ● ● ● PERDAPI,STOPNOFPR ● - - PERDCFG,FACTORYRESET ● - - ●:デフォルト設定に戻る <データフィールド> 主に可変長であり、必ずデリミタ','で区切られます。 有効なデータ文字は"!","$","*","¥","^"を除いた ASCII 文字コード 0x20(スペース)~0x7D("}")の全ての文字です。 該当するデータがない場合は、ヌルフィールドで表します。 "[ ]"で囲まれた箇所は省略可能な項目を表します。 <チェックサムフィールド> "$"の次のデータから"*"の前のデータまでの全てのデータを、8 ビット全てにつき XOR(排他的論理和)をとり、その結 果を 2 バイトのアスキーキャラクタに変換します。 <CR><LF> センテンスの終了を表します。送信時は省略可能です。 - <CR>: 0x0D - <LF>: 0x0A
5 受信機のステート
図 5.1 に受信機のステートダイアグラムを示します。 電源OFF S1T21
測位停止 S3 測位動作 S2T12
T31
T23
T32
図 5.1 ステートダイアグラム 表 5.1 に各ステートについて記載します。 表 5.1 受信機のステート ステート名 説明 電源 OFF 電源 OFF の状態で、一切の入出力を行わない状態 測位動作 測位演算機能が動作しており、周期的に測位結果を出力する状態 測位停止 測位演算機能が停止している状態(スタンバイ状態) 表 5.2 に各ステートへの遷移動作を示します。 表 5.2 ステート遷移動作 状態遷移 遷移動作 Notes T12 電源 ON - T21 電源 OFF T31 T23 下記コマンドを入力 - PERDAPI,STOPNOFPR,DRPARK T32 下記コマンドを入力 - PERDAPI,START PERDACK および PERDSYS,FIXSESSION,ON センテ ンスにより測位動作ステートへ遷移したことを確認できま す。6 ステート別のセンテンス入出力条件を表 5.3、表 5.4、表 5.5、表 5.6 に示します。 表 5.3 標準NMEAセンテンス出力条件 出力センテンス 出力内容 測位動作 測位停止 RMC 推奨最小ナビゲーション情報 ● - GNS GNSS 測位データ ● - GGA GPS 測位データ ● - GLL 緯度経度情報 ● - VTG 速度方位情報 ● - GST GNSS 擬似距離誤差 ● - GBS 異常衛星検出 ● - GSA DOP と測位使用衛星 ● - ZDA 衛星時刻情報 ● - GSV 視野内衛星情報 ● - ●:出力可能。出力 ON/OFF と出力周期はPERDCFG,NMEAOUTコマンドにより設定可能。 -:出力不可 表 5.4 専用NMEAセンテンス入力条件 入力コマンド 入力内容 測位動作 測位停止 PERDAPI CROUT オリジナルセンテンス出力要求 I I DATUM 測地系設定 I I START 起動要求 NACK I STOPNOFPR_DRPARK 停止要求 I NACK PERDCFG FACTORYRESET オールクリア要求 NACK I NMEAOUT 出力標準 NMEA センテンス設定 I I UART1 シリアル通信設定 I 6 I PERDSYS GPIO アンテナ接続状態の確認要求 q q VERSION ソフトウェアバージョン出力要求 q q I:入力可能 q:出力要求可能 NACK:入力を行っても処理に反映されない 6 このコマンドは測位停止ステートで入力してください。
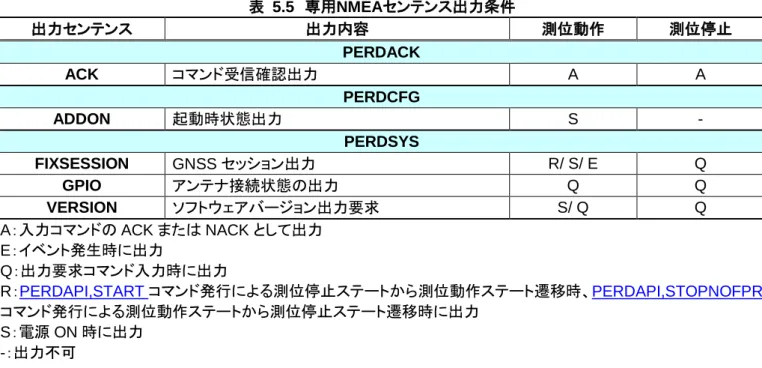
表 5.5 専用NMEAセンテンス出力条件 出力センテンス 出力内容 測位動作 測位停止 PERDACK ACK コマンド受信確認出力 A A PERDCFG ADDON 起動時状態出力 S - PERDSYS FIXSESSION GNSS セッション出力 R/ S/ E Q GPIO アンテナ接続状態の出力 Q Q VERSION ソフトウェアバージョン出力要求 S/ Q Q A:入力コマンドの ACK または NACK として出力
E:イベント発生時に出力 Q:出力要求コマンド入力時に出力 R:PERDAPI,STARTコマンド発行による測位停止ステートから測位動作ステート遷移時、PERDAPI,STOPNOFPR コマンド発行による測位動作ステートから測位停止ステート遷移時に出力 S:電源 ON 時に出力 -:出力不可 表 5.6 Dead Reckoning用NMEAセンテンス入力条件 入力コマンド 入力内容 測位動作 測位停止 PERDAPI ODOREVERSE バック信号の設定 N/A I PERDSYS DRPERSEC DR 測位の更新周期設定 N/A I I:入力可能 N/A:測位動作中の入力を禁止
8
6 バックアップデータ
受信機は「最終更新位置」、「最終更新時刻情報」、「エフェメリス」、「アルマナック」、「DR パラメータ」をバックアップ します。バックアップしたデータは、次回起動時の初期測位時間を短縮するために用いられます。 バックアップデータはバックアップ RAM に保存されますので、モジュールの VBK に電源が給電されている間、バッ クアップデータを保持し続けます。 ①最終更新位置 GGA, GLL, GNS, RMC センテンスの測位情報で最後に出力した「位置」を指します。 デフォルト設定、または GGA, GLL, GNS, RMC センテンスの測位情報を測位毎に出力する設定の場合に限りま す。それ以外の場合は、受信機が内部で求めた最後の「位置」を指します。 位置測位時にバックアップします。 ②最終更新時刻情報 受信機が GGA, GLL, GNS, RMC センテンスの測位情報で最後に出力した「UTC 時刻」と、その時点における RTC カウンタ値の情報を指します。 デフォルト設定、または GGA, GLL, GNS, RMC センテンスの測位情報を測位毎に出力する設定の場合に限りま す。それ以外は、受信機が内部で求めた最後の「UTC 時刻」と、その時点における RTC カウンタ値を指します。 最初に時刻が確定した時に、バックアップします。 電源 OFF ステートで RTC へバックアップ電流が供給されていれば、次回電源投入時に最終更新時刻情報と RTC カウンタ値の差分から、電源投入時の時刻を求めることができます。 最終更新時刻情報と RTC カウンタ値の差分から求めた時刻を「RTC 時刻」と定義します。RTC 時刻を求められる 状態を「RTC 時刻が有効」、最終時刻情報、または RTC へのバックアップ電流が供給されておらず、RTC 時刻を求 められない状態を「RTC 時刻が無効」とします。 ③エフェメリス 衛星が放送しているエフェメリスの情報。エフェメリスデータ取得時と更新時にバックアップします。 ④アルマナック 衛星が放送しているアルマナックの情報。アルマナックデータ取得時と更新時にバックアップします。 ⑤DR パラメータ 受信機が GGA, GLL, GNS, RMC センテンスの測位情報で最後に出力した「UTC 時刻」における慣性センサや車 速パルスに関するパラメータです。7 送受信シーケンス
本章は受信機と受信機を利用するホスト間の送受信シーケンスについて記載します。 本プロトコルは、10 章および 11 章に記載されたコマンドを入力すると、応答センテンス($PERDACK...)、または要 求されたデータを出力します。 正しいコマンドを入力したにも関わらず、受信機から応答がない場合、伝送路上で何らかのエラーが発生した可能 性があるため、再度コマンドを送信してください。7.1 起動直後
受信機の電源を投入した直後、受信機はバージョンメッセージ($PERDSYS,VERSION...)、設定データ、測位動 作開始メッセージ($PERDSYS,FIXSESSION,ON)を出力し、起動処理を行います。受信機は起動処理が完了する まで、入力を受け付けません。入力が可能となるのは、電源投入後、最大で 600 ミリ秒後になります。 図 7.1 は電源投入からコマンド入力が可能になるまでのシーケンスです。 受信機 ホスト 起動処理 (600 msec) $PERDSYS,VERSION... : バージョン情報 測位動作 (入力可能) 電源投入 $PERDSYS,FIXSESSION,ON :測位動作開始 1) 図 7.1 電源投入からコマンド入力可能になるまでのシーケンス Notes: 1) 設定データが出力されます。 (出力例) $PERDSYS,ANTSEL,FORCE1H,1HIGH*6C $PERDCFG,ADDON,GV8687,DEADRECK*26 $PERDSYS,VBKERR,OK*44 $PERDSYS,FIXSESSION,INIT*4910
7.2 測位停止ステートから測位動作ステートに遷移時
図 7.2 は測位停止ステートから測位動作ステートに遷移するまでのシーケンスです。 測位停止ステートからPERDAPI,STARTコマンドを入力すると、PERDACKセンテンスと PERDSYS,FIXSESSION,ONセンテンスを出力後、測位動作ステートに遷移します。 受信機 ホスト $PERDSYS,FIXSESSION,ON :測位動作開始 $PERDAPI,START... : 起動要求 $PERDACK,PERDAPI... : 入力受理 (START) 測位動作 測位停止 図 7.2 測位停止ステートから測位動作ステートに遷移7.3 周期的に出力するセンテンス(デフォルト設定時)
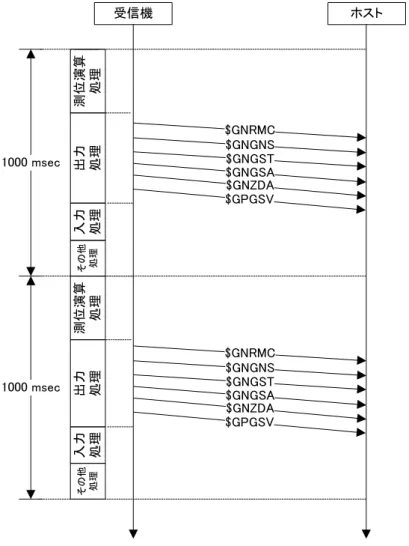
図 7.3 は 1Hz の測位周期に同期して、RMC, GNS, GST, GSA, ZDA, GSV センテンス(GSV 以外の Talker ID は GN、GSV の Talker ID は GP)を出力時の送信シーケンスを示します。 入 力 処 理 受信機 ホスト 1000 msec 1000 msec 測 位 演 算 処 理 出 力 処 理 入 力 処 理 そ の 他 処 理 測 位 演 算 処 理 出 力 処 理 そ の 他 処 理 $GNGST $GNGSA $GNZDA $GNGNS $GNRMC $GPGSV $GNGST $GNGSA $GNZDA $GNGNS $GNRMC $GPGSV 図 7.3 周期的に出力するセンテンスの通信シーケンス
12
7.4 受信機の設定変更時
受信機の設定を変更する場合のシーケンスを以下に示します。 図 7.4 は、測位周期:1Hz、RMC, GNS, GSV センテンスを測位周期に同期して出力している受信機に対して、 PERDAPI,DATUMコマンドとPERDAPI,CROUTコマンドを入力したシーケンスです。入力タイミングによって、それ ぞれのコマンドに対する応答および測位結果へ入力した設定が反映されるまでの時間が異なることを示しています。 受信機 ホスト $GNRMC $GNGNS $GPGSV 1000 msec $GNRMC $GNGNS $GPGSV (DATUM反映) 1000 msec $PERDAPI,DATUM $PERDACK,PERDAPI(DATUM) 測 位 演 算 処 理 出 力 処 理 $PERDAPI,CROUT 1000 msec CROUT 応答時間 CROUT 設定反映 遅延時間 入 力 処 理 そ の 他 処 理 測 位 演 算 処 理 出 力 処 理 入 力 処 理 そ の 他 処 理 測 位 演 算 処 理 出 力 処 理 入 力 処 理 そ の 他 処 理 DATUM 応答時間 DATUM 設定反映 遅延時間 $PERDACK,PERDAPI(CROUT) $GNRMC $GNGNS $GPGSV $PERDCRD $PERDCRI (CROUT反映) 図 7.4 受信機設定時の通信シーケンス(1Hz)1. 入力に対する応答が、出力されるまでの最大遅延時間 測位動作ステート、更新周期 1Hz の場合、コマンド入力処理の直後に入力した設定コマンドは、測位演算処理と出 力処理が完了した次の入力処理で受理されるため、コマンドの入力から応答が出力される(設定の反映が完了する) まで最大で 1000 ミリ秒を要します。 表 7.1 は各ステート状態の各更新周期での入力に対する応答が出力されるまでの最大遅延時間です。 表 7.1 入力に対する応答が出力されるまでの最大遅延時間 ステート名 更新周期 [Hz] 最大遅延時間 [ミリ秒] 測位動作 1 1000 2 5 10 測位停止 - 100 2. 入力した設定が、測位結果に反映され、出力されるまでの最大遅延時間 測位動作ステート、更新周期 1Hz の場合、入力した設定が反映された測位結果が出力されるまでは、コマンドの入 力から最大で 2000 ミリ秒を要します。 表 7.2 は測位動作ステートで、各更新周期で入力した設定が測位結果に反映され、出力されるまでの最大遅延時 間です。 表 7.2 入力した設定が測位結果に反映され、出力されるまでの最大遅延時間 ステート名 更新周期 [Hz] 最大遅延時間 [ミリ秒] 測位動作 1 2000 2 5 10 3. 一度に入力可能なコマンド数 本受信機は、原則として 1 秒間に 1 回、入力コマンドを受け付けます。 この時、受信機の設定や測位状況により、負荷が低い場合は、1 秒間に複数の入力コマンドを受け付けることも可 能です。 ※測位停止ステートの場合、20 個のコマンドを連続で受信機に入力することが可能です。また、最初に入力したコマ ンド郡に対して、受信機が応答を出力し終わった時点で、次のコマンド入力が可能となります。
14
7.5 受信機データの出力要求
受信機にデータ出力要求を行う場合のシーケンスを以下に示します。 図 7.5 は、1Hz で測位を行っている受信機に対して、PERDSYS,GPIOコマンドとPERDSYS,VERSIONコマンド を入力した場合に、それぞれの入力から要求したデータが出力されるまでのシーケンスを示しています。 受信機 ホスト 1000 msec 1000 msec $PERDSYS,GPIO:GPIO出力要求 $PERDSYS,VERSION :ソフトウェアバージョン出力要求 $PERDSYS,GPIO:GPIO情報 測 位 演 算 処 理 出 力 処 理 入 力 処 理 そ の 他 処 理 測 位 演 算 処 理 出 力 処 理 入 力 処 理 そ の 他 処 理 $PERDSYS,VERSION : ソフトウェアバージョン応答 $GNRMC $GNGNS $GPGSV $GNRMC $GNGNS $GPGSV 図 7.5 受信機データ出力要求時の通信シーケンス(1Hz) 1. データ出力要求コマンド入力後、要求データが出力されるまでの最大遅延時間 測位動作ステート、更新周期 1Hz の場合、入力処理の直後に入力したデータ出力要求コマンドは、測位演算処理 と出力処理が完了した次の入力処理で受理されるため、コマンド入力から要求したデータが出力されるまで、最大で 1000 ミリ秒を要します。 表 7.3 は各ステート状態で、各更新周期でのデータ出力要求コマンド入力後、要求データが出力されるまでの最 大遅延時間です。 表 7.3 要求データが出力されるまでの最大遅延時間 ステート名 更新周期 [Hz] 最大遅延時間 [ミリ秒] 測位動作 1 1000 2 5 10 測位停止 - 1007.6 シリアル通信設定の変更
図 7.6 にシリアル通信設定変更時のシーケンスを示します。 シリアル通信設定の変更は測位停止ステートで行います。 測位停止ステートでPERDCFG,UART1コマンドを入力すると、受信機はPERDACKセンテンスを出力し、その後、 設定が反映されます。 受信機 ホスト $PERDCFG,UART1 : シリアル通信設定 $PERDAPI,STOPNOFPR,DRPARK : 停止要求 $PERDACK,PERDAPI :入力受理 (STOP) 設定反映 設定反映 $PERDACK,PERDCFG :入力受理 (UART1) $PERDSYS,FIXSESSION,OFF :測位動作停止 図 7.6 シリアル通信設定変更シーケンスの概要7.7 測位停止
図 7.7 に測位動作ステートから測位停止ステート遷移時のシーケンスについて記載します。 受信機 ホスト $PERDAPI,STOPNOFPR,DRPARK : 停止要求 $PERDACK,PERDAPI $GNGST $GNGSA $GNZDA $GNGNS $GNRMC $GPGSV 測位動作16
7.8 電源 OFF
測位動作中に受信機の電源を OFF にしたとしても、再起動時に正常に動作するようになっていますので、任意のタ イミングで電源を OFF にすることができます。ただし、バックアップデータのバックアップ RAM 領域への書き込み中に 電源を OFF にした場合、バックアップデータが途中で破壊され、そのバックアップデータは使えなくなる可能性があり ます。いつバックアップ RAM 領域にバックアップデータを保存しているのかをホスト側から知ることはできません。そこ で任意のタイミングで電源を OFF する前に、PERDAPI,STOPNOFPRコマンドを送信して測位動作を停止することに より、バックアップデータを破壊する可能性を排除することができます。PERDAPI,STOPNOFPR コマンド送信後、PERDSYS,FIXSESSION,OFFセンテンスを受信してから電源を OFF してください。図 7.8 に受信機の電源 OFF 時
のシーケンスについて記載します。 受信機 ホスト $PERDAPI,STOPNOFPR,DRPARK : 停止要求 $PERDACK,PERDAPI :入力受理 (STOP) $PERDSYS,FIXSESSION,OFF :測位動作停止 $GNGST $GNGSA $GNZDA $GNGNS $GNRMC $GPGSV 測位停止 測位動作 電源OFF 図 7.8 電源OFF時のシーケンス
8 NMEA センテンスの受信について
8.1 データ受信
ホスト側受信バッファに PT-G1 の USB 通信ポートから受信したデータを全て保存します。8.2 センテンス切り出し
上述の 8.1 節で受信データを格納したバッファの先頭から解析していきます。センテンスの切り出しのために、最初 に「$」を探します。 「$」が見つかったら、次に「*」を探し、見つかったところで「$」と「*」の間にあるデータ全てを使って 8 ビット毎に XOR (排他的論理和)をとり、「*」の後に続く 1 バイト(アスキー2 キャラクタをバイナリの 1 バイトデータに変換)のチェックサ ムと比較します。チェックサム比較の結果、 - チェックサムが合えば、センテンス成立と判断し、データの切り分けに進みます。 - チェックサムが異なれば、センテンス不成立として、このデータを破棄します。 チェックサムに続く<CR>,<LF>は読み捨てます。 チェックサムが正常だった場合、「$」以降の 5 キャラクタを読み出します。最初の 2 バイトは TalkerID(GP,GL,GN) を表します。 TalkerID の後の 3 キャラクタにより、センテンス種類の特定を行います。出力予定のない(出力設定していない)セ ンテンスを受信した場合は、センテンス出力設定のコマンドが正常に反映されていない、または受信機のリスタートが 発生したなどの異常が発生したことが考えられます。8.3 測位回毎のセンテンス切り出し
受信機は、1 回測位毎に出力設定したセンテンスにより測位結果を出力します。例えば、RMC, GNS, GSV センテ ンスを測位回毎に 1 回出力する設定をしている場合、1Hz 測位では、これらのセンテンスが 1 秒間に 1 回ずつ(GSV は追尾衛星数や測位に使用している衛星システムにより複数センテンスを 1 回)出力されます。センテンスを出力す る順番は決まっており(10.2.2 項参照)、この例の場合は RMC センテンスが最初で次に GNS センテンス、最後に GSV センテンスが出力されます。従いまして、RMC センテンスから GSV センテンスを受信したところで、1 測位分の センテンスを受信したと見なすことができます。 1Hz 測位では、この測位毎のセンテンス出力間隔は測位演算にかかる時間により、多少前後することはあります が、概ね 1 秒間です。この間隔(最初の RMC センテンスが出力されてから次の測位回の RMC センテンスが出力さ れるまでの時間)が 2 秒以上になれば、ボーレートの設定が適切ではなく、測位結果の出力が間に合っていない、ま たは受信機の出力が止まってしまっているなどの異常が発生した可能性があります。8.4 センテンス毎のデータ切り出し
18
8.5 Talker ID
TalkerID の「GP」は GPS、「GL」は GLONASS、「GN」はマルチ GNSS(複数の GNSS システムを使用)を表しま す。 GSA センテンスと GSV センテンス以外は、TalkerID に関わらず、1 回の出力につき、1 個のセンテンスしか出力さ れません。GPS での測位結果か GLONASS での測位結果、またはマルチ GNSS による測位結果の違いにより、特 にアプリケーション側で処理の切り分けを行うのでなければ、GSA/GSV センテンス以外では、TalkerID を読み捨てて も構いません。 GSA/GSV センテンスの場合、TalkerID が示す GNSS システムとセンテンス内のデータフィールドが示す GNSS シ ステムの種類が一致している必要があります。GSA センテンスは、衛星番号と第 18 フィールドにある GNSS システ ム ID により、GNSS システムの種類を特定できます。GSV センテンスは衛星番号により、GNSS システムの種類を 特定できます。 同一センテンスの TalkerID による GNSS センテンス種類と、センテンス内のデータフィールド情報から得た GNSS センテンス種類が異なる場合は、センテンス受信異常や、受信機からのセンテンス出力に抜けがあるなどの異常が 発生した可能性があります。このような異常が発生した場合は当該センテンスデータを破棄してください。8.6 衛星番号
8.5 節で説明しましたように、GSA/GSV センテンスでは衛星番号が出力されますので、TalkerID に対する衛星番 号が合っているかどうかを確認することにより、異常センテンスの判断ができます。以下に受信機が出力する際の GNSS システム毎の衛星番号を示します。 GPS:01~32…PRN No.と同じ SBAS:33~51…PRN No.から 87 を引いた値 QZSS:93~97…PRN No.から 100 を引いた値 GLONASS:65~89…PRN No.と同じ8.7 時刻
時刻はいろいろなセンテンスのデータフィールドに含まれています。以下に時刻を含む出力センテンスの種類を示 します。 GBS, GGA, GLL, GNS, RMC, ZDA このうち、ZDA センテンスは現在時刻(測位回毎のセンテンス出力開始時刻)を表し、それ以外のセンテンスは測 位時刻を表しています。すなわち、例えば GNS センテンスと RMC センテンスを出力するような設定であれば、同一測 位回の出力値として、両者の時刻は一致します。これが一致しない場合は、異なる測位回のセンテンスを同一の測位 回として受信している可能性があります。もしくは、センテンス受信異常や、受信機からのセンテンス出力に抜けがあ った、またはボーレートの設定が適切でないなどの異常が考えられます。8.8 測位ステータス
PT-G1 が測位しているかどうかを確認するためには、いくつかのセンテンスが出力する測位状態、測位モード7を確 認します。測位状態を出力するセンテンスは以下の通りです。 GGA, GLL, GNS, GSA, RMC 各々のセンテンスにおいて、測位ステータスが未測位や無効になっていた場合、その測位回の測位データは使用 できません。同一の測位回で、センテンス毎に測位ステータスが異なる場合は、異なる測位回のセンテンスを同一の 測位回として受信している可能性があります。もしくは、センテンス受信異常や、受信機からのセンテンス出力に抜け があるなどの異常が考えられます。 7 測位状態、測位モードの表すステータスにつきましては、本書の各センテンスの説明ページを確認してください。8.9 GNSS 未測位でも測位が有効になるケース
PT-G1 では GNSS 衛星を使用した測位ができないような状況でも、センサなどの測位支援情報を用いて測位演算 することができるため、測位ステータスが有効になります。この間、測位モードは推測航法、測位状態はデータ有効に なります。8.10 方位
DR が有効な状態で、バック信号が入力されて、バックしている間の方位は、機首方位を出力します。 DR が無効(GNSS 単独)の場合、バック信号の入力に関わらず、移動方向の方位を出力します。 停止時の方位は、DR が無効な場合に限り、信頼性がありませんので、使用できません。無効データとして取り扱っ てください。20
9 標準 NMEA 出力
NMEA0183 Ver.4.10(2012 年 6 月制定)に準拠した NMEA 標準出力センテンス(GBS, GGA, GLL, GNS, GSA, GST, GSV, RMC, VTG, ZDA)を出力します。デフォルトでは RMC, GNS, GST, GSA, ZDA, GSV センテンスが毎秒 出力されます。
各センテンスの出力周期を設定する場合はPERDCFG,NMEAOUTコマンドで行います。
9.1 GBS – GNSS Satellite Fault Detection
書式:
$--GBS , hhmmss.sss , x.x , x.x , x.x , xx , x.x , x.x , x.x ,
1 2 3 4 5 6 7 8
x , x *hh <CR> <LF> 9 10
Field Data type Range Description
1 hhmmss.sss 000000.000 to 235959.999 GGA または GNS 測位に基づいた UTC 時刻8 hh:時、mm:分、ss.sss:秒 2 x.x Null これらのフィールドは RAIM 機能が ON の時に有効になります。 PT-G1 は RAIM 機能に非対応のため、常にヌルになります。 3 x.x Null 4 x.x Null 5 xx Null 6 x.x Null 7 x.x Null 8 x.x Null 9 x 1 GNSS システム ID 1:GPS(SBAS、QZSS を含む) 10 x 1 Signal ID
1:L1 C/A (GPS), G1 C/A (GLONASS) 例: $GPGBS,081707.800,,,,,,,,1,1*5E 8 PERDSYS,DRPERSECコマンドで測位周期を設定した場合、ソフトウェアの負荷状態により測位結果の出力間隔が 20ms~300ms 程度でばらつく場合があります。
9.2 GGA – Global Positioning System Fix Data
書式: $--GGA , hhmmss.sss , ddmm.mmmm , a , dddmmm.mmmm , a , x , xx , 1 2 3 4 5 6 7 x.x , x.x , M , x.x , M , x.x , xxxx *hh <CR> <LF> 8 9 10 11 12 13 14Field Data type Range Description
1 hhmmss.sss 000000.000 to 235959.999 UTC 時刻9 hh:時、mm:分、ss.sss:秒 2 ddmm.mmmm 0000.0000 to 9000.0000 緯度 dd:度、mm.mmmm:分 3 a N,S "N"(北緯)または"S"(南緯) 4 dddmm.mmmm 00000.0000 to 18000.0000 経度 ddd:度、mm.mmmm:分 5 a E,W "E"(東経)または"W"(西経) 6 x 0,1,2,6 測位状態 0:未測位 1:単独測位 2:ディファレンシャル測位10 6:推測/Dead Reckoning 測位 7 xx 00 to 12 測位使用衛星数(GPS、SBAS、QZSS) 8 x.x Null, 0.0 to 50.0 HDOP 9 x.x - 海抜高度 [m] 10 M M 海抜高度の単位(メートル) 11 x.x - ジオイド高 [m] 12 M M ジオイド高の単位(メートル) 13 x.x Null PT-G1 は RTCM11による DGPS 非対応のため、常にヌルフィ ールドが出力されます。 14 xxxx Null 例: $GPGGA,025411.516,3442.8146,N,13520.1090,E,1,11,0.8,24.0,M,36.7,M,,*66
22
9.3 GLL – Geographic Position - Latitude/Longitude
書式:$--GLL , ddmm.mmmm , a , dddmm.mmmm , a , hhmmss.sss , a , a *hh <CR> <LF>
1 2 3 4 5 6 7
Field Data type Range Description
1 ddmm.mmmm 0000.0000 to 9000.0000 緯度 dd:度、mm.mmmm:分 2 a N,S "N"(北緯)または"S"(南緯) 3 dddmm.mmmm 00000.0000 to 18000.0000 経度 ddd:度、mm.mmmm:分 4 a E,W "E"(東経)または"W"(西経) 5 hhmmss.sss 000000.000 to 235959.999 UTC 時刻12 hh:時、mm:分、ss.sss:秒 6 a A,V 測位状態 A:データ有効 V:データ無効 7 a A,D,E,N 測位モード表示 A:単独測位 D:ディファレンシャル測位13 E:推測/ Dead Reckoning 測位 N:データ無効 例: $GPGLL,3442.8146,N,13520.1090,E,025411.516,A,A*5F 12 PERDSYS,DRPERSECコマンドで測位周期を設定した場合、ソフトウェアの負荷状態により測位結果の出力間隔が 20ms~300ms 程度でばらつく場合があります。 13 SBAS により、3 衛星以上の GNSS 衛星がディファレンシャル補正されている場合に、ディファレンシャル測位になりま す。
9.4 GNS – GNSS Fix Data
書式: $--GNS , hhmmss.sss , ddmm.mmmm , a , dddmmm.mmmm , a , c--c , xx , 1 2 3 4 5 6 7 x.x , x.x , x.x , x , x , x *hh <CR> <LF> 8 9 10 11 12 13Field Data type Range Description
1 hhmmss.sss 000000.000 to 235959.999 UTC 時刻14 hh:時、mm:分、ss.sss:秒 2 ddmm.mmmm 0000.0000 to 9000.0000 緯度 dd:度、mm.mmmm:分 3 a N,S "N"(北緯)または"S"(南緯) 4 dddmm.mmmm 00000.0000 to 18000.0000 経度 ddd:度、mm.mmmm:分 5 a E,W "E"(東経)または"W"(西経) 6 c-c A,D,E,N15 各衛星システムの測位状態 (左から GPS、GLONASS、Reserved) A:単独測位 D:ディファレンシャル測位16 E:推測/Dead Reckoning 測位 N:データ無効 7 xx 00 to 24 測位使用衛星数 8 x.x Null, 0.0 to 50.0 HDOP 9 x.x - 海抜高度 [m] 10 x.x - ジオイド高 [m] 11 x Null PT-G1 は RTCM 非対応のため、常にヌルフィールドが出力され ます。 12 x Null 13 x V PT-G1 は RAIM 機能に非対応のため、常に”V”が出力されます。 例: $GNGNS,092356.800,3442.8211,N,13520.1147,E,DDN,20,0.5,36.8,36.7,,,V*6A
24
9.5 GSA – GPS DOP and Active Satellites
複数の衛星システムを使用する場合(GPS(SBAS、QZSS を含む)と GLONASS を使用)は、複数行に分けて出 力されます。
書式:
$--GSA , a , a , xx , xx , xx , ・・・ , xx , x.x , x.x , x.x , h *hh <CR> <LF> 1 2 3 4 5 6-13 14 15 16 17 18
Field Data type Range Description
1 a M,A 動作モード M:2D または 3D 固定モード A:2D/3D 自動切換モード 2 a 0,1,2,3 測位モード 0:未測位17 1:未測位 2:2D 測位 3:3D 測位 3-14 xx - 使用衛星番号(衛星がない場合はヌル) 15 x.x Null, 0 to 50.0 PDOP(測位していない場合はヌル) 16 x.x Null, 0 to 50.0 HDOP(測位していない場合はヌル) 17 x.x Null, 0 to 50.0 VDOP(測位していない場合はヌル) 18 x 1,2 GNSS システム ID 1:GPS(SBAS、QZSS を含む) 2:GLONASS 例: $GNGSA,A,3,13,05,15,20,02,30,21,29,24,42,93,,1.0,0.5,0.8,1*3F $GNGSA,A,3,71,73,86,72,87,74,88,85,,,,,1.0,0.5,0.8,2*36 17 PERDSYS,DRPERSECコマンドで測位周期を変更した場合、Field 2 の測位モードが 1(未測位)になる条件のときに 0 として出力されます。PERDSYS,DRPERSEC コマンドで測位周期を変更しなければ、0 が出力されることはありません。
9.6 GST – GNSS Pseudo Range Error Statistics
本センテンスが出力する精度指標は、GNSS 衛星から求めた推定位置に対する指標であり、Dead Reckoning に よる補正は加味されていません。 書式: $--GST , hhmmss.sss , x.xx , x.xx , x.xx , x.xx , x.xx , x.xx , x.xx *hh <CR> <LF> 1 2 3 4 5 6 7 8Field Data type Range Description
1 hhmmss.sss 000000.000 to 235959.999 GGA または GNS 測位に基づいた UTC 時刻18 hh:時、mm:分、ss.sss:秒 2 x.xx Null 19, 0.00 to 999.99 精度指標 RMS 擬似距離残差のバラつき具合の標準偏差 [m] 3 x.xx Null 19 , 0.00 to 999.99 誤差楕円(長軸) [m] 4 x.xx Null 19 , 0.00 to 999.99 誤差楕円(短軸) [m] 5 x.xx Null 19 , 0.00 to 180.00 誤差長軸傾き [度] 6 x.xx Null 19 , 0.00 to 999.99 精度指標標準偏差 緯度 [m] 7 x.xx Null 19 , 0.00 to 999.99 精度指標標準偏差 経度 [m] 8 x.xx Null 19, 0.00 to 999.99 精度指標標準偏差 高度 [m] 例: $GNGST,054328.800,12.42,1.19,0.81,22.50,0.78,1.02,1.28*4E $GNGST,000011.340,,,,,,,*50
26
9.7 GSV – Satellites in View
本センテンスが 1 回の出力で表示できる衛星の最大数は 4 個です。それ以上は、2 番目以降のメッセージで出力さ れます。衛星データの中で確定していない項目がある場合は、そのフィールドはヌルとなります。 衛星システムの衛星情報は、GPS(SBAS、QZSS 含む)は GPGSV、GLONASS は GLGSV で出力されます。複 数の衛星システムの衛星情報がある場合、GSV は衛星システム毎に GPGSV、GLGSV の順で出力されます。GPS、 SBAS、QZSS の情報がある場合、GPGSV は GPS、SBAS、QZSS の順に衛星データが出力されます。 衛星情報は、衛星位置が算出される前は衛星番号順に、衛星位置算出後は仰角の高い順に出力されます。ただ し、SBAS と QZSS はサーチや追尾状況に依存するため、その限りではありません。 書式: $--GSV , x , x , xx , xx , xx , xxx , xx , xx , xx , xxx , xx , 1 2 3 4 5 6 7 8 9 10 11 xx , xx , xxx , xx , xx , xx , xxx , xx , h *hh <CR> <LF> 12 13 14 15 16 17 18 19 20Field Data type Range Description
1 x 1 to 4 メッセージの総数 2 x 1 to 4 メッセージの番号 3 xx 00 to 16 視野内衛星数 4 xx 01 to 99 1 個目の衛星番号20 5 xx 00 to 89 1 個目の衛星の仰角 [度] 6 xxx 000 to 359 1 個目の衛星の方位角 [度] 7 xx 00 to 69 1 個目の衛星の C/N0 [dB-Hz] 8-11 - 2 個目の衛星情報(内容は Field 4~7 と同じ) 12-15 - 3 個目の衛星情報(内容は Field 4~7 と同じ) 16-19 - 4 個目の衛星情報(内容は Field 4~7 と同じ) 20 h 1 Signal ID
1:L1 C/A (GPS), G1 C/A (GLONASS) 例: $GPGSV,3,1,11,17,66,333,53,20,57,055,51,28,46,217,50,04,33,278,46,1*63 $GPGSV,3,2,11,32,28,045,45,01,26,062,45,23,24,117,47,11,14,083,41,1*66 $GPGSV,3,3,11,13,10,149,40,50,00,000,46,93,84,353,51,,,,,1*5F 20 各衛星システムの衛星番号は、以下の通り表示します。 GPS:01~32…PRN No.と同じ SBAS:33~51…PRN No.から 87 を引いた値 QZSS:93~97…PRN No.から 100 を引いた値 GLONASS:65~89…PRN No.と同じ メッセージの番号 メッセージの総数
9.8 RMC – Recommended Minimum Navigation Information
書式: $--RMC , hhmmss.sss , a , ddmm.mmmm , a , dddmm.mmmm , a , x.xx , 1 2 3 4 5 6 7 x.xx , ddmmyy , x.x , a , a , a *hh <CR> <LF> 8 9 10 11 12 13Field Data type Range Description
1 hhmmss.sss 000000.000 to 235959.999 UTC 時刻21 hh:時、mm:分、ss.sss:秒 2 a A,V,N ステータス A:データ有効 V:データ無効 N:データ無効 3 ddmm.mmmm 0000.0000 to 9000.0000 緯度 dd:度、mm.mmmm:分 4 a N,S "N"(北緯)または"S"(南緯) 5 dddmm.mmmm 00000.0000 to 18000.0000 経度 ddd:度、mm.mmmm:分 6 a E,W "E"(東経)または"W"(西経) 7 x.xx - 速度 [knot] 8 x.xx 0.00 to 360.00 DR が無効時:進行方位 [度] DR が有効時:機首方位 [度] 9 ddmmyy dd: 01 to 31 mm: 01 to 12 yy: 00 to 99 年月日 dd:日、mm:月、yy:年の末尾 2 桁 10 x.x Null 非対応 11 a Null 非対応 12 a A,D,E,N22 測位モード表示 A:単独測位 D:ディファレンシャル測位23 E:推測/ Dead Reckoning 測位 N:データ無効
13 a V PT-G1 は RAIM 機能に非対応のため、常に”V”が出力されます。
例:
$GNRMC,092406.800,A,3442.8211,N,13520.1148,E,0.01,353.80,230812,,,D,V*0A
28
9.9 VTG – Course Over Ground & Ground Speed
書式:$--VTG , x.x , T , x.x , M , x.xx , N , x.xx , K , a *hh <CR> <LF>
1 2 3 4 5 6 7 8 9
Field Data type Range Description
1 x.x 0.00 to 360.00 DR が無効時:進行方位 [度] DR が有効時:機首方位 [度] 2 T T 真方位を示す 3 x.x Null 非対応 4 M M "M"固定 5 x.xx - 速度 [knot] 6 N N ノットを示す 7 x.xx - 速度 [km/h] 8 K K 時速を示す 9 a A,D,E,N24 測位モード表示 A:単独測位 D:ディファレンシャル測位25 E:推測/ Dead Reckoning 測位 N:データ無効
例:
$GPVTG,156.27,T,,M,0.00,N,0.01,K,A*3B
9.10 ZDA – Time & Date
書式:$--ZDA , hhmmss.sss , xx , xx , xxxx , xx , xx *hh <CR> <LF>
1 2 3 4 5 6
Field Data type Range Description
1 hhmmss.sss 000000.000 to 235959.999 UTC 時刻 hh:時、mm:分、ss.sss:秒 2 xx 01 to 31 UTC 日 3 xx 01 to 12 UTC 月 4 xxxx to 2099 UTC 年 5 xx Null 非対応 6 xx Null 非対応 例: $GNZDA,092406.670,23,08,2012,,*48 受信機が更新可能な時刻の範囲は、バックアップデータの有無によって、下表の通りとなります。 バックアップの状態 更新可能な時刻の上限 バックアップ無効時 2034 年 8 月 19 日 23:59:59 バックアップ有効時 2099 年 12 月 31 日 23:59:59(システム上限値) 24 多 Hz 出力時、PERDSYS,FIXSESSION,ON が出力されてから、測位状態が A/D/E になるまでに最大で 1 秒かかりま す。 25 SBAS により、3 衛星以上の GNSS 衛星がディファレンシャル補正されている場合に、ディファレンシャル測位になりま す。
10 専用 NMEA 入力
本受信機のプロトコル専用の入力コマンドです。有効な受信コマンドのみ受信します。コマンドを受信した場合は
PERDACKセンテンスを返します。
10.1 API – eRide GNSS Core Library Interface
10.1.1 CROUT – オリジナルセンテンス出力許可 受信機の評価用に使用するための古野オリジナルセンテンスの出力を設定します。PERDCRx(x はオリジナルセ ンテンスの種類)というフォーマットで出力されます。 オリジナルセンテンスは標準 NMEA センテンス出力後に出力されます。各オリジナルセンテンスの出力順、および 更新周期は表 10.1 の通りです。 表 10.1 オリジナルセンテンス出力順序 出力順 オリジナルセンテンス サブセンテンス 出力周期 前 PERDCRD,26 I 測位更新周期 R PERDCRI,26 A 測位更新周期 G 後 O 書式:
$PERDAPI , CROUT , codes [, off ] *hh <CR> <LF>
1 2 3
Field Data type Range Default Description
1 CROUT - - コマンド名 2 codes D, I ALLOFF ALLOFF 出力するオリジナルセンテンスの種類 複数のセンテンスを設定可能 ALLOFF:全てのオリジナルセンテンスの出力を停止 3 off 0 - Field 2 で設定したオリジナルセンテンスの出力を停止 例: $PERDAPI,CROUT,DI*09 $PERDAPI,CROUT,ALLOFF*0A
30 10.1.2 DATUM – 測地系の設定 測地系を設定します。 書式: $PERDAPI , DATUM , nnn *hh <CR> <LF> 1 2
Field Data type Range Default Description
1 DATUM - - コマンド名 2 nnn 001,172 001 測地系 001:WGS-84 172:日本測地系(Tokyo Datum) 例: $PERDAPI,DATUM,001*23 $PERDAPI,DATUM,172*26 10.1.3 START – 起動要求とスタートモードの設定 測位停止ステートから設定したスタートモードで測位動作ステートに遷移します。このコマンドを送る時は測位停止 ステートでなければなりません。測位停止ステートへの遷移は、PERDAPI,STOPNOFPRコマンドにより行います。 表 10.2 に各スタートモードで使用するバックアップデータを示します。 表 10.2 スタートモードとバックアップデータ バックアップデータ モード
HOT WARM COLD SIMCOLD
最終更新位置 バックアップ値を使用 バックアップ値を使用 クリアし、初期値へ戻 す クリアし、初期値へ 戻す 最終更新時刻 バックアップ値を使用 バックアップ値を使用 クリアし、初期値へ戻 す クリアし、初期値へ 戻す アルマナック バックアップ値を使用 バックアップ値を使用 バックアップ値を使用 クリアする エフェメリス バックアップ値を使用 クリアする クリアする クリアする DR パラメータ バックアップ値を使用 バックアップ値を使用 クリアする クリアする 書式:
$PERDAPI , START [ , mode ] *hh <CR> <LF>
1 2
Field Data type Range Default Description
1 START - - コマンド名 2 mode HOT, WARM, COLD, SIMCOLD HOT スタートモード 例: $PERDAPI,START*37 $PERDAPI,START,HOT*48 $PERDAPI,START,WARM*12 $PERDAPI,START,COLD*1F $PERDAPI,START,SIMCOLD*48
10.1.4 STOPNOFPR – 停止要求
測位動作ステートから測位停止ステートへ遷移します。本コマンドで測位停止ステートになった受信機は、電源の OFF/ON、またはPERDAPI,STARTコマンドによって再スタートします。
書式:
$PERDAPI , STOPNOFPR , Drpark *hh <CR> <LF>
1 2
Field Data type Range Default Description
1 STOPNOFPR - - コマンド名
2 Drpark DRPARK - DRPARK 固定 例: $PERDAPI,STOPNOFPR,DRPARK*18
10.2 CFG – Application Software の設定
10.2.1 FACTORYRESET – バックアップ RAM のバックアップ情報全消去 バックアップ RAM に記憶された衛星情報(エフェメリス、アルマナック)、位置情報、時刻情報と、DR パラメータを消 去し、工場出荷状態にします。 このコマンドは測位停止ステートで送信してください。PERDACKセンテンスが返るまでに、最大 30 秒かかる場合 があります。 書式: $PERDCFG , FACTORYRESET *hh <CR> <LF> 1Field Data type Range Default Description
1 FACTORYRESET - - コマンド名 例:
32 10.2.2 NMEAOUT – 標準 NMEA 出力設定 標準 NMEA センテンスの出力を設定します。このコマンドは常に送信可能です。コマンドはすぐに反映されます。 表 10.3 に標準 NMEA センテンスの出力順を示します。 表 10.3 標準NMEAセンテンス出力順 出力順 標準 NMEA データ内容 デフォルト出力 前 RMC 位置・測位時刻・速度・方位 ● GNS GNSS 測位データ ● GGA 位置・測位時刻等 N/A GLL 位置・測位時刻 N/A VTG 速度・方位 N/A GST 誤差楕円・精度指標 ● GBS 異常衛星検出 N/A GSA 測位状態・DOP ● ZDA 現在日時等 ● 後 GSV 衛星情報等 ● 書式:
$PERDCFG , NMEAOUT , type , interval *hh <CR> <LF>
1 2 3
Field Data type Range Default Description
1 NMEAOUT - - コマンド名 2 type GBS, GGA, GLL, GNS, GSA, GST, GSV, RMC, VTG, ZDA 表 10.3 参照 設定する標準 NMEA センテンス 3 interval 0 to 60 1 センテンスの更新周期 0:出力停止 例: $PERDCFG,NMEAOUT,GGA,2*57 $PERDCFG,NMEAOUT,GSV,0*56 Notes: PERDSYS,DRPERSECコマンドで測位周期を変更(多 Hz 測位)し、PERDCFG,NMEAOUT コマンドで各センテン スの出力設定を行った場合の注意点を記載します。 多 Hz 測位は、1 秒に 1 回の GNSS 測位と、その他センサによる DR 測位で構成されます。慣性センサ DR モードが 無効(DR 無効)のときは、その他センサによる補間の測位結果を出力するタイミングで未測位のデータを出力しま す。 NMEAOUT コマンドによる更新周期は、多 Hz 測位時、1 秒に 1 回の GNSS 測位のタイミングと同期しておりません。 すなわち、DR 無効中、interval で設定された値によっては、その他センサによる補間の測位結果のみを出力すること になります。 この場合、常に未測位(データ無効)のデータが出力されます。DR 有効になることで、測位(データ有効)のデータが 出力されるようになります。
10.2.3 UART1 – USB 通信ポートの設定
USB 通信ポートの設定を行います。このコマンドで USB 通信ポートの設定を変更した場合、それまで使っていたボ ーレートでPERDACKセンテンスを送信します。
書式:
$PERDCFG , UART1 , baud [, databits , parity , stopbits *hh <CR> <LF>
1 2 3 4 5
Field Data type Range Default Description
1 UART1 - - コマンド名 2 baud 4800, 9600, 19200, 38400, 57600, 115200, 230400 115200 ボーレート[bps] 3 databits 8 8 データ長
4 parity NONE,EVEN,ODD NONE パリティ
5 stopbits 1,2 1 ストップビット
例:
$PERDCFG,UART1,115200*65
34
10.3 SYS – PVT System の制御と応答
10.3.1 GPIO – アンテナ接続状態の出力要求 アンテナ接続状態(GPIO レジスタ値)の出力を要求します。 書式: $PERDSYS , GPIO *hh <CR> <LF> 1Field Data type Range Default Description
1 GPIO - - コマンド名 例: $PERDSYS,GPIO*67 10.3.2 VERSION – ソフトウェアバージョンの出力要求 ソフトウェアバージョンの出力を要求します。 書式: $PERDSYS , VERSION *hh <CR> <LF> 1
Field Data type Range Default Description
1 VERSION - - コマンド名
例:
11 Dead Reckoning 用入力センテンス
11.1 API – eRide GNSS Core Library Interface
11.1.1 ODOREVERSE – バック信号の設定
書式:
$PERDAPI , ODOREVERSE , mode *hh <CR> <LF>
1 2
Field Data type Range Default Description
1 ODOREVERSE - - コマンド名 2 mode 0, 1 0 モード 0:High レベルで後退、Low レベルで前進 1:High レベルで前進、Low レベルで後退 例: $PERDAPI,ODOREVERSE,1*6E
11.2 SYS – システム設定
11.2.1 DRPERSEC – DR 測位の更新周期設定 DR 測位更新周期を変更するコマンドです。このコマンドは測位停止ステートで送信してください。更新周期が変わ るセンテンスは表 11.1 の通りです。本コマンドで測位周期を設定した場合、ソフトウェアの負荷状態により測位結果 の出力間隔が 20ms~300ms 程度でばらつく場合があります。 表 11.1 更新周期が変わるセンテンス センテンス 更新周期RMC, GNS, GGA, GLL, VTG, GST, GBS, ZDA, PERDCRD, PERDCRI 1,2,5,10
GSA, GSV 1
書式:
$PERDSYS , DRPERSEC , Hz *hh <CR> <LF>
1 2
Field Data type Range Default Description
1 DRPERSEC - - コマンド名
2 Hz 1,2,5,10 1 DR 測位の更新周期 [Hz] 例:
36
12 専用 NMEA 出力
弊社専用プロトコルの出力センテンスです。独自センテンスであることを示す"$PERD"で始まります。12.1 ACK – コマンド受信確認出力
入力コマンドの受信確認のために出力されます。コマンドは確認応答が送られる前にチェックサムが有効でなけれ ばなりません。 書式:$PERDACK , command , sequence , subcommand *hh <CR> <LF>
1 2 3
Field Data type Range Description
1 command - 受信したコマンドの最初のフィールド 2 sequence -1, 0 to 255 受信に成功したコマンド回数 コマンド受信に成功するたびに 1 加えられ、0 から 255 を繰り返します。 コマンド受信に失敗した場合は-1 を返します。 3 subcommand - 受信したコマンドの 2 番目のフィールド subcommand がない場合は N/A と表示されます。 例: $PERDACK,PERDAPI,13,DATUM*76
12.2 CFG – PERDCFG 入力コマンドの返答
12.2.1 ADDON このセンテンスは受信機の立ち上げ時に出力されます。 書式:$PERDCFG , ADDON , name , feature *hh <CR> <LF>
1 2 3
Field Data type Range Description
1 ADDON - コマンド名 2 name - 3 feature - 例: $PERDCFG,ADDON,N/A,BASIC*57 $PERDCFG,ADDON,GV8687,DEADRECK*26
12.3 SYS – PERDSYS 入力コマンドの返答
これらのセンテンスは主に PERDSYS 入力コマンドの返答として出力されます。FIXSESSIONのみ PERDSYS の 応答とは独立して出力されます。
12.3.1 FIXSESSION – GNSS Session Query
このセンテンスは下記イベント時に出力されます。 - 受信機の立ち上げ時 - 測位動作ステート遷移時 - 測位停止ステート遷移時 - ファーストフィックス時27 書式:
$PERDSYS , FIXSESSION , state , appttff , corettff *hh <CR> <LF>
1 2 3 4
Field Data type Range Description
1 FIXSESSION - コマンド名 2 state ON, OFF, INIT, STANDBY 受信機の状態 3 appttff - Application の TTFF [ミリ秒] 4 corettff - Core Library の TTFF [秒] 例:
$PERDSYS,FIXSESSION,OFF*1C
38
12.3.2 GPIO – アンテナ接続状態の出力
アンテナの接続状態を表します。このセンテンスはPERDSYS,GPIOコマンドの返答として出力されます。 書式:
GPIO 0 8
$PERDSYS , GPIO , aaaaaaaaa *hh <CR> <LF>
1 2
Field Data type Range Description
1 GPIO - コマンド名 2 status H,L GPIO0~GPIO8 のステータス 左端 2 文字が、アンテナの接続状態を示します。 HHxxxxxx:アンテナは、正常に接続されています。 LHxxxxxx:アンテナが、接続されていません。 HLxxxxxx:アンテナ回路が、ショートしています。(異常) “x”は、任意の文字列とします。 例: $PERDSYS,GPIO,HHHHLLLLL*07 12.3.3 VERSION – バージョン出力 デバイス名、ソフトウェアバージョンを出力します。このセンテンスは下記イベント時に出力されます。 - 受信機の立ち上げ時 - PERDSYS,VERSIONコマンドの応答時 - PERDCFG,UART1コマンドの設定変更時28 書式:
$PERDSYS , VERSION , device , version , reason , custom *hh <CR> <LF>
1 2 3 4 5
Field Data type Range Description
1 VERSION - コマンド名 2 device - デバイス名 3 version - バージョン番号 4 reason BOOT, QUERY, UART1 出力条件 BOOT:立ち上がり時 QUERY:VERSION コマンド入力時 UART1:UART1 の設定変更時 5 custom GV8687 例: $PERDSYS,VERSION,OPUS7_SFLASH_MP_64P,ENP633A1414503F,QUERY,GV8687*17 28 UART1 の設定変更時は、変更されたボーレートでこのセンテンスを出力します。
13 Dead Reckoning 用出力センテンス
DR 用出力センテンスについて記述します。センテンス出力設定については、10.1.1 節に記載しています。
13.1 CRD – DR 測位結果のデータ
13.1.1 PERDCRD,I – 補正後の慣性センサデータ
書式:
$PERDCRD , I , imuParamconf , validAccel , xAccel , yAccel , zAccel , validGyro , xGyro , yGyro ,
1 2 3 4 5 6 7 8 9 10
zGyro , validThermo , temperature , odomtrConf , xOdomtrVel , xOdomtrDir *hh <CR> <LF>
11 12 13 14 15 16
Field Data type Range Description
1 $PERDCRD - コマンド名 2 I - サブコマンド名 3 imuParamconf 0 to 3 慣性センサパラメータの信頼性 0:無効 1:初期値 2:初期バイアス推定中 3:センサ誤差推定フィルタによる補正中 4 validAccel 0, 7 加速度センサの有効軸識別フラグ 0:センサ未検出 7:センサ検出済(X・Y・Z 軸有効) 5 xAccel - 加速度データ(X 軸) [m/s2 ] 6 yAccel - 加速度データ(Y 軸) [m/s2] 7 zAccel - 加速度データ(Z 軸) [m/s2 ] 8 validGyro 0, 7 ジャイロセンサの有効軸識別フラグ 0:センサ未検出 7:センサ検出済(X・Y・Z 軸有効) 9 xGyro - ジャイロセンサデータ(X 軸) [dps] 10 yGyro - ジャイロセンサデータ(Y 軸) [dps] 11 zGyro - ジャイロセンサデータ(Z 軸) [dps] 12 validThermo 0 to 2 温度センサの有効識別フラグ 0:センサなし、1:外部センサ、2:内部センサ 13 temperature - 温度データ [°C] 車速パルスの信頼性 0:不明
40
13.1.2 PERDCRD,R – 慣性センサ DR 測位結果
書式:
$PERDCRD , R , imuVerified , drUseMode , velNorth , velEast , velDown , roll , pitch ,
1 2 3 4 5 6 7 8 9
heading , countsStatus , sigmaPos *hh <CR> <LF>
10 11 12
Field Data type Range Description
1 $PERDCRD - コマンド名 2 R - サブコマンド名 3 imuVerified 0 to 3 慣性センサ DR モード 0:無効、1:有効、2:不確実、3:ガレージ 4 drUseMode 0 to 2 DR 使用モード 0:GNSS 単独、1:DR 単独、2:DR/GNSS mixed 5 velNorth -99.99 to 999.99 慣性センサ速度(北方向) [m/s] 6 velEast -99.99 to 999.99 慣性センサ速度(東方向) [m/s] 7 velDown -99.99 to 999.99 慣性センサ速度(下方向) [m/s] 8 roll -180.0 to 180.0 慣性センサロール角 [度] 9 pitch -180.0 to 180.0 慣性センサピッチ角 [度] 10 heading 0.0 to 360.0 慣性センサ方位 [度] 11 countsStatus 0 to 3 DR 速度ステータス 0:無効、1:車速パルス、2,3:Reserved 12 sigmaPos 0 to 999 推定位置誤差の標準偏差 [m] 例: $PERDCRD,R,1,2,-2.28,-12.12,0.16,-1.3,-0.5,260.5,3,17*17 imuVerified の"2:不確実"は、GNSS 受信機が DR による測位結果が精度劣化したと判断した場合に出力されま す。慣性センサデータの測位処理における重みを下げて使用します。通常走行を実施している間に自動的にキャリブ レーションを行い、精度劣化がなくなったと判断した場合に”1:有効”に戻します。 imuVerified の”3:ガレージ”は、PT-G1 が電源を ON した直後にバックアップされた最終走行データ30の妥当性を検 証している期間に出力されます。検証が終われば 0~2 のいずれかに遷移します。この最終走行データの妥当性を検 証している期間は、GNSS 測位環境下(drUseMode が 0)であっても、最終走行データからの DR 単独の位置を出力 する場合があります。 PT-G1 は、最終走行データを、バックアップ RAM にバックアップします。バックアップ RAM へのバックアップは、毎 秒受信機が自動的に実施します。 30 ここでの最終走行データとは、位置・方位・DR パラメータ(慣性センサのキャリブレーション結果等)になります。
13.2 CRI – 慣性センサデータとセンサパラメータ
13.2.1 PERDCRI,A – 加速度センサデータ
書式:
$PERDCRI , A , imuParamconf , validAccel , xRawAccel , yRawAccel , zRawAccel , xGain , yGain ,
1 2 3 4 5 6 7 8 9
zGain , xOffset , yOffset , zOffset , rollAlign , pitchAlign , yawAlign , learnmode *hh <CR> <LF>
10 11 12 13 14 15 16 17
Field Data type Range Description
1 $PERDCRI - コマンド名 2 A - サブコマンド名 3 imuParamconf 0 to 3 加速度センサデータの信頼性 0:無効 1:初期値 2:初期バイアス推定中 3:センサ誤差推定フィルタによる補正中 4 validAccel 0, 7 加速度センサの有効軸を示すフラグ 0:センサ未検出 7:センサ検出済(X・Y・Z 軸有効) 5 xRawAccel - 加速度センサ出力値(X 軸) [digit] 6 yRawAccel - 加速度センサ出力値(Y 軸) [digit] 7 zRawAccel - 加速度センサ出力値(Z 軸) [digit] 8 xGain - 加速度センサゲイン(X 軸)(LSB-18) [m/s2 /digit] 9 yGain - 加速度センサゲイン(Y 軸)(LSB-18) [m/s2 /digit] 10 zGain - 加速度センサゲイン(Z 軸)(LSB-18) [m/s2/digit] 11 xOffset - 加速度センサオフセット(X 軸) [digit] 12 yOffset - 加速度センサオフセット(Y 軸) [digit] 13 zOffset - 加速度センサオフセット(Z 軸) [digit] 14 rollAlign -180 to 180 加速度センサミスアライメント角(ロール角) [度] 15 pitchAlign -180 to 180 加速度センサミスアライメント角(ピッチ角) [度] 16 yawAlign 0 to 35931 加速度センサミスアライメント角(ヨー角) [度] 17 learnmode 0 to 3 加速度センサ学習モード 0:未学習 1:バイアス学習完了 2:ミスアライメント角学習完了 3:バイアスとミスアライメント角の学習完了 例: