MRR Physical Basis(バージョン 1.8.4) METEK 社
MRR の物理的原理
1 MRR の特徴
1.1 概要
MRR(マイクロレインレーダ)は粒径分布の特徴を観測する 24GHz の FM-CW(frequency module continuous wave)レーダである。粒径分布により降水強度、水分量、代表的な落下 速度を30 個のレンジゲートで算出する。非常に弱い雨、すなわち通常の雨量計の観測感度 以下の雨、を観測できる。観測している散乱体積が(その場で測る測器に比べ)大きいの で、統計的に安定な粒径分布を数秒で得ることができる。 それぞれの粒径ビン(対象としている粒径の幅:r+△r)における粒子の個数は対応する周 波数ビン(f+△f)における後方散乱強度より算出する。この手法では、終端速度と粒径の 関係が利用されている。 図 1 MRR のブロックダイアグラム 1.2 レーダの周波数 降水粒子の後方散乱断面積は、粒子の直径が波長に比べて短い時(レーリー散乱)、波長の
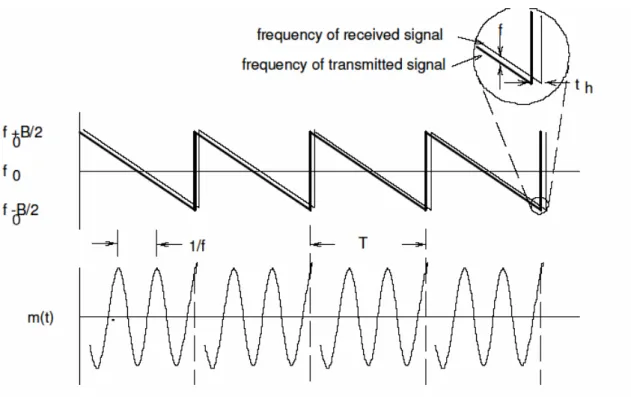
4 乗で増加する。これが、小さな粒子に対する感度を増加するために、高い周波数を用いる 理由である。一方、非常に高い周波数では、中程度より強い雨による減衰によって、定量 的に解釈可能な高度範囲が制限される。MRR が使う 24GHz では、減衰の影響は注意すべ きであるが、十分な精度で補正できる程度である。 1.3 レーダフロントエンド(レーダの入出力) レーダの核となる構成は集積混合ダイオードを持つ周波数変調ガンダイオード発信器であ る。公称の出力は50mW である。 レーダの入出力の構成と機能は図 1 のブロックダイアグラムを参照して説明する。線形偏 波rf-パワーが導波管(waveguide)と角型アンテナ(horn)を通じて供給される。これが、直径 60cm のオフセットパラボナアンテナによる供給を表す。 後方散乱の信号は同じアンテナ装置で受信される(送受同一型レーダ:monostatic radar)。 受信信号は発信器と角型アンテナの間にある導波管に設置された混合ダイオードによって 感知される。このダイオードは送信信号の断片によって変調されており、ミキサーとして 働く。構成が簡単なのでパルスモードでは操作できない。送信機が止まっている間に受信 機も動くことができないからである。連続波(continuous wave)モードで操作するとき、ダ イオードの出力に電位差が現れる。電位差は送受信信号の位相差に依存し(モダイン受信法 の 《入力電波と内部発生の電波の周波数が同じである受信法》)、次の信号処理に用いる。 1.4 FM-CM 方法 1.4.1 静止している点対象 レーダ変調装置(モジュール)がパルスモードでは運用できないので、対象からの距離は通常 の方法、すなわち、パルスの発信とエコーの受信間の経過時間から測定する、という方法 では導き出すことができない。距離の分解能を得るために、発信信号は周波数変調されて、 対象までの距離(あるいは受信エコーの時間差)がエコーと発信信号との周波数のシフトに よって導き出すことができる。ここでは、発信波を線形に減少するよう(のこぎりの歯形に) 周波数変調して用いている。図 2 の上の図で、発信信号の周波数と静止している対象から のエコーの周波数を示す。エコーの時間ずれによって、エコーの周波数は常に発信信号の 周波数より高く、周波数の差は対象の距離に比例する。周波数はf0+B/2 から f0−B/2 まで 線形に裾を引き、初期値まで一気にジャンプして戻る。エコーの周波数ジャンプは時間ず れth = 2h/c だけ、幾分遅れて続く。h は対象までの距離(高度)で c は光速である。発信信号 と受信信号の間の時間間隔thは,これ以上の信号処理には用いない。このギャップは全周波 数操作時間T に比べて小さい。図 2 の下の図は混合ダイオードによる対応出力を示す。こ の周波数は発信と受信信号の周波数差、一定値に等しくなる。
図 2 静止している対象 上図:出力信号とエコーの周波数。下図:ミキサーによる出力 1.4.2 距離分解 送信信号は次の関数で表現できる。
( )
t
S
(
( )
t
)
s
=
sin
ϕ
S (1.4.2.1) ここで位相ϕ
S( )
t
は「瞬時の」角周波数の積分∫
ω
s( )dt
t
である。一走査の間は次の関係が保 たれる。( )
t
T
B
t
sω
π
ω
=
0−
2
ただし、−
T
2
≤
t
≤
T
2
(1.4.2.2) したがって、発信信号の次の式となる。( )
⎟
⎠
⎞
⎜
⎝
⎛
−
=
2 02
2
sin
t
T
B
t
S
t
s
ω
π
(1.4.2.3) 受信信号は発信信号に対してt
h=
2
h
c
だけ遅れる(thだけ前の時間の波が来る)。すなわち 位相は、( )
s(
h)
et
=
ϕ
t
−
t
ϕ
あるいは(
)
⎟
⎠
⎞
⎜
⎝
⎛
−
−
−
+
=
2 2 0 02
2
2
sin
)
(
ht
t
ht
t
hT
B
t
t
E
t
e
ω
ω
π
(1.4.2.4) 混合(mixing) とは基本的に、s(t)と e(t)の掛け算を意味する。仮に両方の信号が正弦関 数で表現できるならば、混合の結果は 2 つの正弦関数の和として記述できる。このとき、 第一項の位相はs(t)と e(t)の位相の和と等しくなり第 2 項の位相は s(t)と e(t)の位相差に等 しい。われわれは周波数の偏差B は周波数の中央値 f0に比べて小さいと仮定する。すると、 第一項は、第二項に比べて非常に小さくなる。第一項の周波数はおよそ2f0である。第一項 の混合シグナルに対する寄与はローパスフィルタで抑え、今後第二項のみについて考える。 第二項の位相は以下。4
4 8
4
4 7
6
4
4
4
4
4
4
4
4
8
4
4
4
4
4
4
4
4
7
6
() 2 0 ) ( 2 2 0 02
1
2
2
1
2
2
1
2
2
1
2
)
(
t t h h h m s et
T
B
t
t
T
B
t
t
T
B
t
T
B
t
t
t
ϕ ϕπ
ω
π
π
π
ω
ω
ϕ
−+
−
−
+
−
−
=
(1.4.2.5) 混合信号の周波数は時間について位相を微分して導く。f
m=
(
1
/
2
π
)
∂
ϕ
m(
t
)
/
∂
t
である。こ れを式(1.4.2.5)に適用すると次の式が得られる。T
t
B
f
h m=
(1.4.2.6) 二つの対象が別々に解析できるのは、それらが少なくともひとつのスペクトル線の周波数 差、つまりδf=1/T、に相当する距離だけ離れているところに限る。方程式(1.4.2.6)から時 間遅れの分解のδthと周波数の分解能δf の間に、次の関係が導かれる。f
B
T
t
hδ
δ
=
(1.4.2.7) 方程式(1.4.2.7)にあるδf を 1/T で置き換えるとδth と空間分解能δh はδh=(1/2)cδthで 関連付けられ次の式が得られる。B
c
h
2
1
=
δ
(1.4.2.8) 要約すると、バンド幅とレンジ分解能の関係は、バンド幅とパルス幅との関係を考えると、 現業で用いるパルスレーダについてのパルス幅と分解能の関係と本質的に違いがない。1.4.3 移動する観測対象 移動する対象からのエコーはさらに位相を変化させる。この変化量はドップラー効果によ って速度に比例している。 したがって、距離の違いによる位相変化と、速度による位相変化には「あいまいさ」が、 あるように思われる。実際、この「あいまいさ」は、一つのレーダで観測している限り、 切り分けることができない。したがって、FFT の周波数分解能が 1/T であり、隣接する周 波数との間には FFT 線が存在しない。一回の走査の間で観測される周波数のずれは数式 1.4.3.2 のようになる。 (1.4.3.1) われわれは、図 3 に示すような、レーダの走査で「ゆっくり」動く対象からのエコーを考 えている。それぞれのレーダ走査による信号波(Beat signal)はフーリエ変形(第 1 次 FT)の 結果である。なお、複素スペクトル線を極座標系で矢印を用いて示している。個々のスペ クトル線はひとつのレンジ区間(距離幅)r を示している。図 3 にはレーダ近傍の 10 個のレ ンジ区間を示す(0≦r≦9)。MRR では 32 個のレンジ幅を計算している。ここで、観測対象 はレンジ番号3 と 4 の間に位置しているのでスペクトル強度は 3 と 4 に等しく配分されて いる。 図 3 ゆっくり動く対象からのエコーの模式図
エコーの時間・空間領域を示す。 この例では次の式で示される速度でレーダに近づいている。 数式 1.4.3.2 すなわち、観測対象の位置はある時刻のレーダ走査から次の操作の間に、λ/8 だけ移動す る。この距離はレンジ幅の深さに比べると小さいので、対象の位置はやはりレンジ番号 3 と4 の間にあり、エコーの位相は次の走査までに 90 度進む。 ここで、それぞれのレンジ区間にある電圧の複素スペクトルを新たな時系列として解釈す る。時系列のサンプル間隔は1/T である。この時系列のフーリエ変換は分解能が 1/nT であ るパワースペクトルを作る。この2 番目の FT において、あいまいさのない周波数範囲(ナ イキストレンジ)は周波数間隔がfN=1/T である波で構成される。ここでの例では、最大の 周波数スペクトルはレンジ番号3、4で周波数が以下の式のところに現れる。
4
/
N Df
f
=
数式 1.4.3.3 数式 1.4.3.2 と数式 1.4.3.3 を比較すると、fD=2ν/λであることがわかる。これはまさに ドップラー速度の関係である。第 2 フーリエ変換で得られるスペクトルは対応するレンジ 区間でのドップラー速度と解釈できる。 距離と速度を分割することは対象物の速度のあいまいさがナイキスト間隔に納まる場合に 限られる。落下する雨滴の場合は、正のシフトを仮定している。したがって、周波数が 0 ≦fD<fN の範囲であれば、あいまいでなはい。ナイキスト間隔の幅は、走査線の繰り返 し比1/Tを選択することによって調整できる。 1.4.4 雨滴による散乱 雨滴の場合は常に非常に多くの粒子が、散乱体積の中に存在する。典型的な弱い雨(1mm/h) での数密度は2000m-3(=2 個/l)である。散乱体積(500m 高度、50m レンジ分解能) は大きさ が約104m3であり、すなわち、2×107の粒子が散乱体積の中に存在する。粒子の位置は空 間的に不規則であるので、個々の粒子からの散乱信号の位相は統計的に独立である。した がって、エコーの全体の出力は個々の散乱信号の出力を足し合わせることによって得られ る。 この場合、ひとつのレンジゲートの中にあるスペクトルが降水粒子の速度分布に対応する スペクトル線の分布によって構成される。FM−CW レーダでこの手法で得られる周波数ス ペクトルは、同じ波長を持つパルス型ドップラーレーダによって得られるスペクトルから 生じるナイキスト間隔の中では変化しない。1.5 スペクトルの処理 1.5.1 位相がそろっていない平均(Incoherent Averaging) 散乱体積内に、無作為(random)に分布している、多数の標的から得られた信号のスペクト ル強度(spectral power)は、全要素の任意の位相で重ねられた、大きな統計的な(stochastic) 成分を含んでいる。おおむね(incident 起こりやすい、ありがちである)、観測した強度 (power)の標準偏差は、強度の真値(expectation,期待される値)に等しい。したがって、強度 スペクトルの集団(ensemble)で平均することで統計的な成分を減らすことができる。強度 スペクトルをnで平均すると、n が 1 より十分大きいときに標準偏差を 1/√nだけ、減ら すことができる。 MRR の DSP(ドップラースペクトルプロセス?) は 1 秒で 25 のスペクトルを作り、これは 実時間の80%である。(n=25 であるので√n=5、1/√n=0.8)。標準の設定では、DSP は 10 秒ごとに平均したスペクトルを受信系に伝送する。データ転送は約 4 秒必要である。この 間は観測ができない。したがって、正味の平均間隔は6 秒であり、6 秒間には 150 個の単 一パワースペクトル(single power spectra)が含まれる。この結果、(n=150 で 1/√n=0.08) スペクトルの統計的な標準偏差は、8%あるいは 0.34dB に抑えられている。 今、我々は、新しい観測値で各レンジ幅において、電力の複素スペクトルを 1/T ごとに解 析する。この時刻の観測でそれぞれのフーリエ変換は1/nT の解像度でスペクトル強度を生 み出す。明確な周波数範囲(ナイキスト範囲)の第 2FT はfN=1/T で構成される。我々の例 でスペクトル強度の最大は、ゲート3 と 4 の強度に見ることができる。 1.5.2 雑音(ノイズ)の評価 エコーの信号に加えて、避けることのできない雑音(ノイズ)がレーダの受信機に入ってく る。この雑音を除くことができれば、見掛けの雨量を検出できる。偽の雨量は小さいかも しれないが、雑音があることで積算雨量には重大なバイアスが生じるかもしれない。(実際 の雨量は観測時間の数%のみ発生し、季候区分や季節に依存する) そこで、ノイズの評価手法を信号解析手順に組み込んでいる。この目的のため、雑音の特 性を、「信号から分離可能である」と仮定している。さらに、雑音は解析するドップラー範 囲では「白色」(周波数依存がない)と仮定している。信号と同様に、スペクトルの雑音強度 は、これまでに述べた設定では統計的に信号の8%あるいは 0.34dB に等しい変動を示す。 ノイズの評価は次の手法による 1.スペクトルの平均を元に、S/N(基準値)を設定する。 2.最大のスペクトルを除き、スペクトルを計算する。 3.スペクトルの平均値が、前の値と同じか、大きくなった場合に、スペクトルの平均値
をノイズレベルとする。 模式図を図 4 に示す。 繰り返す ↓ 図 4 ノイズの評価方法 細い線は残ったスペクトルの平均値を示す。
2 落下粒子の粒径分布の計算
レーダで得られるスペクトルパワーは、下記で表現される。 ) ( 1 ) ( ) ( 2 D D D D f f h r r C df f pη
∆ ⋅ ∆ ⋅ = (2.1)h
∆
はレンジ(高度)分解能、r
はレンジゲート番号、C
(r
)
はレーダの特性パラメータを含 む、補正係数で、レーダ特性パラメータには、送信出力、アンテナの利得、(周波数に依存 する)MRR 受信機の導波管関数が含まれる。η
(
f )
Ddf
Dはスペクトル反射密度、すなわち、 体積当り、周波数あたりの後方散乱断面積である。∆
f
Dは第2 フーリエ変換(2ndFT)の周 波数解である。η
(
f )
Ddf
Dは、補正係数C
(r
)
がわかっていれば、生のスペクトルp
(
f
D)
df
D から求めることができる。 PC に組み込まれた MMR2-control(MMR コントロールマニュアル ver1.3 に記載)は工場 で固定した補正係数C
(r
)
が32 項目のテーブル形式(レンジゲートr
ごとにひとつ)で組み込 まれている。MRR2-control はすべてのレンジゲートについて第 2 フーリエ変換(2ndFT)を 用いてスペクトル強度Fnn
を計算する。ドップラースペクトルは 64 行に分解される(注: 図3 では 8 行しか示していない)。”nn
”は行番号を示す(0≦nn
≦63)。Fnn
は「単位dB
η
の 対数スペクトル体積反射強度」である。Fnn
から、「体積反射強度」は次の式で得ることが できる。 10 /10
Fnn nn=
η
(2.2) そして、「スペクトル反射強度密度は」 D nn nn Df
f
)
=
/
∆
(
,η
η
(2.3) であり、f
D,nn= ・
nn
∆
f
Dである。∆
f
D=
30
.
52
Hz
は MRR2 の第 2 フーリエ変換の分解能 である。)
(
ν
η
から粒径分布への導出は終端落下速度と既往の関係式を使う。その関係式は、Gunn& Kintzer(1949)によって経験的に見つけられ、Atlas(1973)によって近似式(図 5 を参照)が作 られている。われわれは落下速度を大気密度の高さ依存で補正した、一般形を使っている。mm
6
0.109
)
(
)
[mm]
exp(-0.6mm
10.3m/s
-m/s
65
.
9
[m/s]
)
(
D
=
・
-1
・
D
⋅
δ
v
h
for
≤
D
≤
ν
(2.5)われわれは大気密度の高度依存について US 標準大気を仮定し、Foote and duToit(1969)の 関係、
∝
ρ
0.2v
を用いている。これらの仮定の基づき、第 2 次オーダーで近似している。[
5 9 2]
10
71
.
1
10
68
.
3
1
)
(
h
h
h
v
=
+
⋅
−+
⋅
−δ
(2.6)ν
についてfDを微分して、Dについてν
を微分して、スペクトル強度を粒径Dの関数とし て計算する。D
v
f
f
D
nn Dnn D∂
∂
∂
∂
=
η
ν
η
(
)
(
,)
(2.7)[ ]
11973
.
160
−=
∂
∂
m
v
f
D と(h)
)
[mm]
exp(-0.6
18
.
6
[m/s/mm]
/
D
D
δ
v
ν
∂
=
・
・
∂
(方程式(2.5)によ る)を代入すると、次の式ができる。 (2.8) 雨滴粒径D
nnの後方散乱断面積σ
(
D
nn)
でη
(
D
nn)
を割ることで、粒径分布N
(
D
nn)
すなわち、 体積と直径あたりの粒子数が得られる。)
(
)
(
)
(
nn nn nnD
D
D
N
σ
η
=
(2.9) (2.8)と(2.9)を共に用いることで後方散乱断面図σ
(D
)
が判ればドップラースペクトルと 粒径分布についての関数を現すことができる。波長に対して小さな粒径に対しては、後方 散乱断面積はレーリー近似を用いて解析的に表現できる。 6 2 2 2 4 51
1
)
(
D
m
m
D
K R3
2
1 +
−
=
λ
π
σ
(2.10) ここでm
は水の複素屈折因子である。水のK
2は24GHzで約 0.92(氷では 0.18)である。 MRR の波長が自然発生するすべての粒径より小さいわけではないのでレーリー近似はこ こでは適用できない。そのかわりσ
(D
)
はミー理論によって計算される。図 6 は、単独粒 子についての後方散乱断面積をレーリー近似を用いて示す。これはMRR の粒径を回帰的に 求めるときに用いている。直径はこれ以降、体積が等価である球の直径:D=(6V/π)1/3で定 義する。V は粒子の体積である。 MRR2 コントロールプログラムでは、粒径分布を各レンジゲートについて計算している。 粒径分布はドップラー速度領域で等距離にある分離したステップで解く。ステップ幅は∆
ν
である。対応する出力パラメータはNnn で MRR コントロールユーザーマニュアル ver1.3 に記述してある。 nn=0 から 63 まで 64 の速度ステップがν=0 から 12.285m/s に対応付けて計算しているが、 方程式(2.8)は粒径が 0.246mm≦D≦5.03mm のみ利用している。対応する規格化した速度 は0.78≦ν/δ(h)≦8.97m/s である。与えられた粒子サイズの落下速度が高度に依存するの で、解析する速度範囲も、高度に依存している。回帰の幅は、すべての行で調整され、図 7)
[mm]
exp(-0.6mm
990.02
)
(
]
mm
[m
)
(
D
nn -1 -1=
η
f
D,nn⋅
・
-1・
D
η
に示す階段状の範囲が適応される。
図 5 地表面(h=0)での粒径と落下速度の関係
図 7 ドップラー速度を回帰的に求める範囲と高度の関係 注) ギリシャ文字の読み方:ρ(ロー)、η(イータ)
3 降雨変数の導出
3.1 スペクトルの合計と積分 近似的に重み付けしてスペクトル反射強度を周波数によって、あるいは粒径分布を粒径に よって積分することで、さまざまな積分降雨変数を得ることができる。MRR では min(h) から max(h)までの合計(summation)で置き換えられる。地表(h=0)では min(h)=4 から max(h)=49 である。最大最小の高度変化は図 9 図 7 に示す。∫
∑
∞→
0 ) max( ) min()
(
h h nn Ddf
g
f
g
(3.1.1) ここでg
(
f
D)
はスペクトル密度を示す。f
f
g
g
=
(
)
∆
(3.1.2)ここで
∆
f
D=
3
0.5Hz
あるいは D nn nnf
f
g
v
g
∆
∂
∂
=
1
)
(
ν
(3.1.3) ここで]
0.1905[m/s
1
1 =
∆
⋅
∂
∂
Df
v
f
(3.1.4) D についてのスペクトル密度は次の式で得られる。D
v
f
f
g
D
g
D nn nn∂
∂
∆
∂
∂
=
1
)
(
ν
(3.1.5) ここで1
[
mm
1]
3
.
15
(
9
.
65
v
(
h
)
v
[
m
/
s
]
)
D
v
f
v
f
D−
⋅
⋅
=
∂
∂
⋅
∆
⋅
∂
∂
−δ
(3.1.6) 方程式(3.1.5)のg
nngnn、線形の反射強度η
nnを代入すると、線形反射強度密度η
(
D
nn)
が得 られる。方程式(2.9)により粒径分布N
(
D
nn)
が計算される。 3.2 減衰補正した粒径分布 レーダ波の強度は異なるプロセスによって伝搬経路上で減衰する。水蒸気による吸収は 24GHz(0.2dB/km、水蒸気密度 10g/m3)では比較的強いが、ここで考えている経路の長 さでは水蒸気による吸収は無視している。しかし、雨による減衰は、高い高度で中程度以 上の雨ではかなり重要である。このことが、高度により、降水強度を過小評価することと なる。 これより後の文章で、減衰補正しているか、していないかを区別するため、減衰補正して いない変数には下付文字nac(not attenuation corrected)を付ける。r≧2である全ての高度で減衰補正した粒径分布を、繰り返しの(recursive)関係式により計 算できる。
⎟
⎠
⎞
⎜
⎝
⎛
∆
⋅
=
∑
− = 1 1))
,
(
(
exp
)
,
(
)
,
(
r i nn nac nn nnr
N
D
r
h
N
D
i
D
N
κ
(3.2.1) 計算は高度r=2から開始し、高くなるレンジゲートに向けて階段状にすすめていく。レ ンジゲートR=2では、方程式(3.2.1)は次の形を取る。(
(
(
,
1
))
)
exp
)
2
,
(
)
2
,
(
D
nnN
D
nn nach
N
D
nnN
=
⋅
∆
⋅
κ
(3.2.2) 最初のレンジゲートでは減衰は無視できると仮定して、N(Dnn,1)を N(Dnn,1)nac で置き換 える。消失係数kは次の式で計算する。∑
= ==
max( ) ) min()
(
)
(
h nn h nn nn e nnD
D
N
σ
κ
(3.2.3) ここでσe(Dnn)は直径 Dnn である単一粒子の消失係数である。Σe はミー理論により計算され、大粒子で扁平化する事を考慮している(account for)。 図 8 降水粒子の単一の粒子の消失係数。 鉛直入射幾何学的な断面積を投下体積直径について示す。 3.3 等価レーダ反射強度因子 等価レーダ反射因子は次の式で定義される。実際の積分はνについての式が用いられる。
( )
f
df
K
Z
e∫
∞=
0 2 5 41
η
π
λ
(3.3.1)( )
ν
ν
η
π
λ
d
K
Z
e∫
∞=
0 2 5 41
(3.3.1)’ 「等価」という名前は小さい粒子に限定(レーリー近似)した場合、Ze が粒径分布の 6 乗と等 価である事実と関連している。( )
D
D
dD
N
Z
6 0∫
∞=
(3.3.2) (2.9)式を(3.1.1)に挿入すると、方程式(3.3.2)はレーダ反射因子の通常の定義を表す。波長の長い気象レーダと比較して、Zは方程式(3.3.2)を用いてMRRが出力する粒径分布をもとに Zを計算する。 3.4 水分量 水分量は水の密度ρwをもつ全粒子の体積を合計して得られる。したがって、これは粒径分 布の3乗に比例する。
( )
[
/
]
6
3 3 0m
g
dD
D
D
N
LWC
w∫
∞=
ρ
π
(3.4.1) 3.5 降水強度 降水強度の微分rr(D)は終端落下速度 v(D)を乗じた粒子の数密度(π/6)・N(D)D3の微分体 積に等しい。降水強度はこの結果を使って粒径に対して積分することで得られる。( ) ( )
D
D
D
dD
N
RR
π
3ν
06
∫
∞=
(3.5.1) 3.6 特徴的落下速度 特徴的落下速度はいろいろな定義がある。物理的な定義は降水強度全体に最大の寄与をも たらす粒子の速度とすることである。あるいは−ここでの定義は−ドップラースペクトル の1次のモーメントを定義することである。これはウインドプロファイラーが動径速度を 決定する通常の方法だからである。( )
f
fdf
( )
f
df
W
∫
∫
∞ ∞=
0 02
η
η
λ
(3.6.1) レーリー散乱において期待されるドップラースペクトルの1次のモーメントを−粒径分布 に基づいて−導出することも可能である。これは長い波長のウインドプロファイラーによ る観測のよい速度評価法である。この目的にとって結果の粒径分布を「レーリー」反射強度 ηR(D)=N(D)σR(D)を評価することに使えることができる。次いで方程式(2.10)の後方散 乱断面積σRの挿入を行う。これがスペクトルレーリー反射強度を導く( )
(
( ) ( )
)( )( )
D
f
D
D
N
f
R R∂
∂
∂
∂
=
ν
ν
σ
η
/
(3.6.2) 特徴的「レーリー速度」はηRを方程式(3.6.1)に代入することでえられる。4 誤差に対する考察
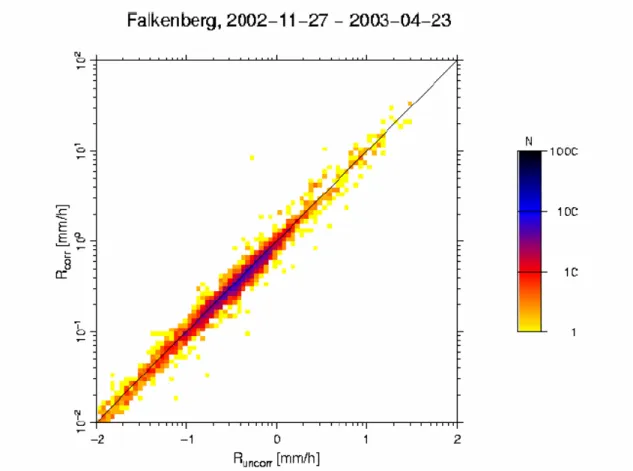
4.1 スペクトル強度の統計誤差 ランダムな内部構造を持つある体積の範囲を対象とすると、位相がばらばらで、別々に散 乱に寄与している対象によって、結果として得られるパワーはランダムに分布している。 一般的なルールとして、個々の周波数ビンにおけるスペクトルパワーの標準偏差は、その 平均値に等しい。 MRR のシリアルインターフェースがデータ転送について制限があるので、最小の観測サイ クルは10 秒にセットしている。インターフェースを通じてスペクトルを出力するのに約 4 秒必要である。この時間はデータポートから低雑音受信アンプまでのスプリアス干渉によ って観測することができない。したがって観測サイクルの中で正味 6 秒間が観測として利 用できる。1 秒間に 23 スペクトルが計算さればらばらの位相で平均されるので、出力され るスペクトルは 138(23×6)の単一スペクトルの最小値の平均を表している。この方法では 上記の統計の揺らぎは平均値の9%まで抑えられる。より長い時間平均では、この変動は正 味の観測時間の平方根に比例する。したがってこのエラーは通常−特に積分する変数では −無視できる。 4.2 鉛直風速 落下する粒子と終端速度の関係(方程式(2.5):落下速度と粒径の関係式)は大気が静止してい ることを仮定している。字際の大気の中では降水粒子は風(降水粒子が持つ長さのスケール は10m のオーダーである)によって運ばれる。したがって、方程式(2.5)の落下速度は環境の 風に相対的な風である。たとえば、下降流は落下速度を増大させるので、方程式(2.5)をそ のまま使うと粒子の直径を過大評価することとなる。散乱断面積は粒径の高次のべき乗に 依存しているので、この場合、方程式(2.8)は粒子の数濃度を過小評価することとなる。し たがって、含水量も降水強度も下降流の場合には過小評価することとなる。この誤差と後 で述べる誤差についての定量的な評価はレーリー散乱に限って、マーシャルパルマー分布 を仮定し、Richter(1993)によって議論されている。数ヶ月間にわたって、100m 高度で鉛 直風の同時現場観測を行った。鉛直風を0 と仮定して発生する誤差は図 9 に示す。それぞ れの観測は1分平均値である。図 9 には本質的な誤差傾向は見られない。平らな地表面で は鉛直風 0 は明らかであるが、この効果は線形ではないので、補正していない降水強度に ついて、同様のことが、必ず成り立つとは言えない。この補正は長期間平均する場合に補 足的な結果を持つことも明らかである。10log(Rcorr/Runcorr)の標準偏差は約 1dB である。 降水強度の標準偏差が(補正のありなしに)依存していないことが観測されている。10,000 観測のうちひとつだけ、補正していない値が12dB も低くなる。図 9 「鉛直風補正のありなし」による降水強度の比較 4.3 レーダの補正 計算された反射強度因子、粒径分布、その他の積分した変数はレーダの補正係数 C に依存 している。C は選ばれた環境の条件によってその場での降水強度と比較することで得られる。 その不確定さは±10%と見積もられている。C の時間的な安定度はよく定義された対象(三 角散乱体)からの反射を評価することと約 30K の範囲以上で送信・受信を切り替えることで 調べられた。反射強度の変動は10%未満と観測されている(反射が対象からに限定されてい るので、これらの測定は標準のシングルプロセスソフトでは実施できない)。 4.4 氷相 氷の複素反射因子はマイクロ波の周波数帯では水と大きく異なる。このレーダの反射強度 因子の違いは、雨滴粒子と氷晶が凝集したものが形状が異なるので一部補われる。特に混 合層(0℃高度)では反射強度因子は雨が観測されるその下の高度に比べてかなり大きい。 MRR に組み込まれた信号解析装置は液体の雨滴粒子を仮定している。雨滴粒子に比べて雪 片は落下速度が小さいので降水強度と含水量は雪の場合はかなり過大評価する。したがっ
て、融解層は明快に(後方散乱によって判断するより明らかに)区別できる。