MT/SR 併用速度検出を用いた速度制御性能の評価
Performance Evaluation of Speed Control Using MT/SR Parallel Speed Detection
精密工学専攻 11 号 岡澤寿 Hisashi Okazawa
1.緒言
圧延機,NC工作機械,ロボットなど,駆動アクチュエータ としてサーボモータを用いたメカトロニクス機器が広く普 及している.これらの機器に所望の動作をさせるために,ロ ータリエンコーダを速度検出器として用いた,マイクロコン ピュータによるモータのディジタル速度制御が必要となっ ている.この制御システムに対する一般的なニーズの中に,
高精度化,高応答化がある.そのような状況の中,近年のマ イクロコンピュータの演算処理能力の向上によって高速,高 機能な演算が実現可能となっている.そこでエンコーダの製 造誤差低減,分解能向上(1)といったハードウェア的改善では なく,マイクロコンピュータ内部で実行される速度検出のア ルゴリズムを改良することによって,ソフト面から速度制御 システム全体を高精度化,高応答化させることを検討してい る.速度制御用マイクロコンピュータの動作プログラムを書 き換えることによる検討であるため,実験評価は容易に行う ことができ,さらにハードウェアの追加コストなしに性能改 善を図ることができる.
本研究では,速度検出に関して,従来から実用的に用いら れているMT方式(2)と,スリット間隔誤差の影響を定常状態に 受けない1回転同期型高精度速度検出方式(3)(以下SR方式と する)を併用したディジタル速度制御方式(以下併用方式と する)の検討を行った.特に,新たな補償方式を提案し,過 渡特性,定常特性をMT,SR単体方式と比較し,その制御性能 を明らかにした.
2.エンコーダを用いたディジタル速度検出
ディジタル速度制御システムにおいて,エンコーダを用い て速度検出を行う場合,エンコーダからの出力パルスとマイ クロコンピュータ内におけるクロックパルスを利用する.
2.1 MT 方式
MT 方式はエンコーダパルスが入ってくる毎に更新される その累積値 と,その更新に同期した時間を計測し,ほぼ一 定の検出周期 毎に検出速度
m
T
dω
d を式(1)により計算する.ただし
P
はエンコーダの分解能[パルス/回転]である.d
d
T
m P ⋅
= π
ω 2 (1)
この MT 方式は速応性において優れており,低速から高速ま で高分解能で速度を検出できる.しかし,エンコーダには製 造過程で生じるスリット間隔の機械的誤差が存在し,MT 方式 では特に低速度における定常状態において速度変動を生じ させる原因となる.
2.2 SR 方式
SR 方式は常に一回転分の角度変位とそれに要した時間 から一回転の平均速度を検出する. これによってエンコーダ のスリット間隔に存在する機械的誤差の影響を受けずに正 確な速度を式(2)によって検出できる.
T
dd
d
T
ω = 2 π
(2)しかし,この方法は一回転しないと速度検出情報が得られ ないので,応答の高速化が難しい.
3. MT/SR 併用速度検出を用いた速度制御
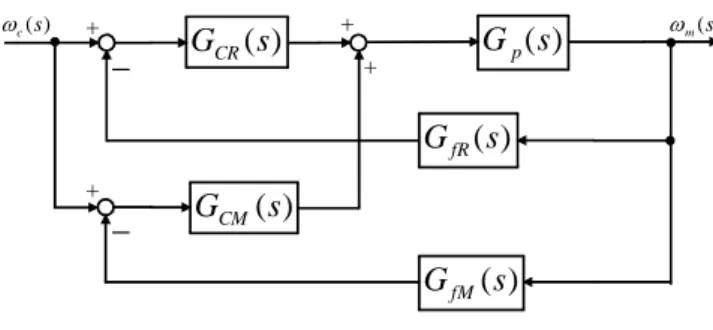
3.1 制御系の構成
MT 方式における定常状態での速度変動,SR 方式における速 応性が悪いという問題を解決するために,二つの速度検出方 式を併用する Fig.1 の速度制御方式を提案する.
+ +
+
-
) (s G
p) (s G
fR) (s G
fM+
- )
c(s
ω ωm(s)
) (s G
CM) (s G
CRFig. 1 Speed control system using MT/SR parallel speed detection
モータの速度指令
ω
c(s )
と SR 速度検出の特性 の出 力との差が SR 補償用伝達関数 に入力される.また一 方で、) (s G
fR)
(s G
CR)
c
(s
ω
と MT 速度検出の特性 の出力との差が MT 補償用伝達関数 に入力される.各補償用伝達関数で は,入力にそれぞれ補償演算を施し,演算結果を出力する.) (s G
fM)
(s G
CM二つの出力値の和は,操作量として制御対象 に入力さ れ,最終的にモータの速度 として出力される。モータ 速度
) (s G
p)
m
(s ω )
m
(s
ω
は SR 及び MT の速度検出の入力となり,フィー ドバック信号が得られる.3.2 制御系の伝達関数
Fig.1 のブロック線図において
ω
c(s )
とω
m(s )
の関係はp cM fM cR
fR
p cM cR c
m
G s G s G s G s G
G s G s G s
s
)) ( ) ( ) ( ) ( ( 1
)) ( ) ( ( )
( ) (
+ +
= + ω
ω
(3)となる.
3.3 制御系の補償要素
過渡状態における速応性向上と定常状態における速度変 動低減の両立を図る補償方法として,過渡状態においては,
SR 方式の比例補償と同時に MT 方式の補償効果を大きくし,
定常状態においては SR 方式の積分補償を主体にし MT 方式の 補償効果を下げる方法が考えられる.このことから SR 方式 には PI 補償を適用した.
一方,MT 方式には周波数特性の観点から考えると,低周波 帯域のゲインは低く,高周波帯域のゲインは高い補償要素が 望ましいと言える.そこでハイパスフィルタを適用すること を考える.ここで制御対象のモデルには積分器が含まれてい るため,ハイパスフィルタを一つ用いただけでは相殺され,
減衰効果が消えてしまうので,ハイパスフィルタを二次とす ることで減衰効果を持たせた.この時,高周波帯域のゲイン が不必要に増加することを防ぐため,ローパスフィルタを付 加し,高周波ノイズ対策とした.以上より,MT 補償要素の伝 達関数
G
CM(s )
は) 1 )(
1 )(
1 ) ( (
3 2
1
2
s T s T s T s Ks
G
CM+ +
= + (5)
となる.
G
CM(s)のボード線図をFig.2 に示す.時定数T1をカッ トしたい低周波帯 域を基に設計し,
また,T2とT3の設 計により高周波帯 域のゲインを操作 し,速度変動低減,
速応性の改善を図
る. Fig.2 Bode diagram of MT controller 3.4 制御系の伝達関数
MT 補償要素 に二次のハイパスフィルタ,SR 補償要 素 に PI 補償を用いた制御系のブロック線図を Fig.3 に示す.
) (s G
CM)
(s G
CRFig.3 Speed control system using MT/SR parallel speed detection Fig.3 のブロック線図において
ω
c(s )
とω
m(s )
の関係はとなる.ただし,
) 1 )(
1 )(
1 ( )
( s T
1s T
2s T
3s
A = + + +
(7) であり, はモータ電流制御系の伝達関数, はモータ のイナーシャである.) (s
G
iJ
m4. 速度制御系の制御特性
4.1 シミュレーションによる検討 4.1.1 全体構成
MATLAB によって作成した併用方式の速度制御系シミュレ ーションのブロック線図を Fig.4 に,そのパラメータを Table 1 に示す.
SR MT
0.00181 friction toruqu2
num(s) den(s) Transfer Fcn4
1 J.s
t To Workspace1
x1 T o Workspace
1 Saturation2
MT _hosyouki S-Function5
PULSE S-Function4
ERROR S-Function3 YOU2_si
S-Function2 OU1_
S-Function1
1 s Integrator1 1
s Integrator
Kp1
Gain5
Ki1
Gain3
Kt
0 Display
Clock1 Clock
Fig.4 Simulation model of speed control system Table 1 Simulation parameters
シミュレータにおいては,(MT_KENSYUTU)のブロックにお いて MT 方式で,(SR_KENSYUTU)のブロックでは SR 方式で速 度検出をそれぞれ行い,速度フィードバック信号として速度 指令との差分値が各補償器に入力される.SR 補償器は連続系 のブロックを用いた PI 補償器となっている.それぞれの補 償器で演算された結果が各補償要素の出力値となり,二つの 和に電流指令値の制限をかけた値を電流制御系への入力と する.また,モータ速度を積分器に通し角度信号とした値を ブロック(ERROR),(PULSE)によって任意のスリット間隔誤差 値を付加した角度変位として経過時間と共に速度検出ブロ ックへ入力する.
4.1.2 正弦波状に誤差を付加した時の速度制御の定常特性 Table2 に示す条件で併用方式の速度制御を行い, MT 単体 方式,SR 単体方式と立ち上がり時間をほぼ同じにしたステッ プ応答の過渡状態を Fig.5 に示す.併用方式は MT 単体方式 ほどではないものの,SR 単体方式に比べてオーバーシュート は少なく,応答性が改善されている様子がわかる.また,定 常状態においては,Fig.6 に示すように,併用方式は MT 単体 方式に比べて速度変動を半分以下に低減することができて いる.
Table 2 Simulation parameters Speed reference[rad/s] 20→30
Sampling time[ms] 1 Max slit space error[%] 20
Time constant T1=10-2,T2=10-4,T3=10-7,K=10-4
Fig.5 Transient response Fig.6 Steady state Torque constant Kt[Nm/A] 6.03×10-2
Slit of Encoder P[P/R] 64,16
+ +
+
-
) (s G
is Jm
1
) (s G
fR) (s G
fM+
-
)
c
(s ω
Step
-80 -60 -40 -20 0 20 40
Magnitude (dB)
101 102 103 104 105 106 107
-90 -45 0 45 90 135 180
Phase (deg)
Bode Diagram
Frequency (rad/sec) 1
1T 1 2
T 1 3
T
)
m(s +
ω
s + Ki1
p1
K
) 1 )(
1 )(
1
( 1 2 3
2
s T s T s T
Ks + + +
1 1.2 1.4 1.6 1.8 2
20 22 24 26 28 30 32 34
3.5 3.6 3.7 3.8 3.9 4
29.85 29.9 29.95 30 30.05 30.1
Time[s]
Speed[rad/s]
Parallel method MT method SR method )
( ) ( ) ( ) ( ) ( ) ( ) (
) ( ) ( ) ( ) (
) (
) (
2 3
1 1
3 1
1
s A s J s G s G Ks s G s G s A sK K
s G Ks s A s G sK K s
s
m fM i fR
i p i
i i
p i c
m
+ +
+
+
= + ω
ω
(6)
Time[s]
eed Parallel method
MT method SR method
Sp[rad/s]
さ ら に Table2 の 条 件 に お い て 速 度 指 令 を 200 か ら 210[rad/s]と高速領域に変えた時のステップ応答の過渡応 答を Fig.7 に示す.過渡応答は,Fig.5 と比べて併用方式,
SR 単体方式共に MT 単体方式に近い応答性を実現できている.
これは,高速領域であるために SR 方式の速度検出遅れが小 さくなり,応答性が向上するためと考えられる.定常状態に おいては Fig.8 に示すように Fig.6 の時とは対称的に,併用 方式が MT 単体方式よりも速度変動を大きく生じる結果とな った.
Fig.7 Transient response Fig.8 Steady state 以上の速度指令の違いにおける,各方式の応答を比較した 結果を周波数特性から検討するために,Fig.9 に併用方式の MT補償要素のボード線図と用いた正弦波状誤差の周波数を 示す.補償器のゲイン交点角周波数が 102[rad/s]となってい るため,この周波数を境に低周波側の周波数成分は減衰され,
逆に高周波側の周波数成分は増幅されることになる.速度指 令 30[rad/s]で駆動した時に速度変動が小さくなったのは補 償 要 素 の 減 衰 域 に
誤 差 の 周 波 数 成 分 が あ る た め で あ る と考えられる.逆に,
210[rad/s] で 変 動 値が増加したのは,
誤 差 の 周 波 数 成 分 が MT 補 償 器 の 増 幅 域 に 存 在 す る た め で あ る と 考 え ら れ る.速度指令と速度 変 動 の 関 係 を Fig.10 に 示 す . Fig.9 の特性をもつ 補償要素では,速度 指 令 が 160[rad/s]
以 下 の 範 囲 に お い て,併用方式はMT方
式よりも速度変動が小さいことがわかる.
4.1.3 一スリット誤差を付加した時の速度制御の定常特性 Table3 に示す条件で併用方式の速度制御を行い, MT 単体 方式,SR 単体方式と目標値に到達する時刻をほぼ同じにした ステップ応答の過渡状態を Fig.11 に示す.併用方式は MT 単 体方式ほどではないものの,SR 単体方式より立ち上がりが速 く,オーバーシュートの少ない制御ができていることがわか る.また,定常状態における速度変動に関しては,Fig.12
から,高周波のスパイク状の変動が併用方式では大きく生じ る結果となった.しかし,スパイク状の変動間の低周波の変 動に関しては,併用方式の方が MT 単体方式よりも少なくな っていることが読み取れる.
Table 3 Simulation parameters Speed reference[rad/s] 100→110
Sampling time[ms] 1 Slit space error[%] 10
Time constant T1=10-3,T2=10-7,T3=10-8,K=10-6
1 1.2 1.4 1.6 1.8 2
200 202 204 206 208 210 212
Time[s]
S
3.9 3.92 3.94 3.96 3.98 4
209.4 209.5 209.6 209.7 209.8 209.9 210 210.1 210.2 210.3 210.4
Time[s]
Speed[rad/s]
Parallel method MT method SR method
1.3 1.32 1.34 1.36 1.38 1.4 1.42 1.44 1.46 1.48 1.5
109.7 109.8 109.9 110 110.1 110.2 110.3 110.4 110.5
Time[s]
Speed[rad/s]
Parallel method SR method MT method
1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.45 1.5
100 102 104 106 108 110 112 114
Time[s]
Speed[rad/s]
Parallel method SR method MT method
Fig.11 Transient response Fig.12 Steady state 正弦波状誤差の場合と違う特性を示したことに関して周 波数特性から検討を行う.Fig.13 に MT 補償要素のボード線 図を,Fig.14 に MT 補償器に入力される一スリット誤差を FFT した結果を示す.Fig.13 のゲイン交点角周波数の値から,MT 補償要素において周波数が 1000[rad/s]を境に減衰域と増幅 域に分かれることになる.ここで,Fig.14 より用いている誤 差入力は,周波数 1000[rad/s]以下の低周波帯域において強 い周波数成分を含んでいることがわかる.このことから,併 用方式で低周波の速度変動が低減されたのは,スリット誤差 の基本周波数成分が
MT 補償要素によって 減衰された結果によ
るものと考えられる.
あ一方,Fig.14 より,
こ の 誤 差 入 力 は 1000[rad/s]よりも高 い周波数帯域におい てある程度の振幅を 持っていることがわ かる.ここで,Fig.13 との関係よりこの周 波数成分は MT 補償器 において増幅される こととなる.高周波の 速度変動が併用方式 で大きく生じるのは,
このことが起因して いると考えられる.
モータのロータイ ナーシャを 10 倍にし たときの定常状態を Fig.15 に示す.応答 性が鈍くなり高周波 の感度が緩和される
-50 0 50 100
Magnude (dB)it
101 102 103 104 105 106 107 108
-45 0 45 90 135 180
Ph as e ( de g)
Bode Diagram
Frequency (rad/sec)
1000[rad/s]
0 1000 2000 3000 4000 5000 6000 7000 8000 900010000
0 2 4 6 8 10 12 14 16
1000[rad/s]
-40 -20 0 20 40
Magnude (dB)it
101 102 103 104 105 106 107
-90 -45 0 45 90 135 180
Ph ase (de g)
Bode Diagram
Frequency (rad/sec)
30[rad/s]
210[rad/s]
Fig.9 Bode diagram of MT controller
Fig.10 The relation between speed fluctuation and speed reference
Fig.13 Bode diagram of MT controller
Fig.14 Frequency characteristic of speed detection error
Fig.15 Steady state
peed[rad/s]
Parallel method MT method SR method
0 1 2 3 4 5 6
20 40 60 80 100 120 140 160 180 200
Speed reference[rad/s]
Speed fluctuation[%]
Parallel method MT method SR method
1.36 1.38 1.4 1.42 1.44 1.46 1.48 1.5
109.86 109.88 109.9 109.92 109.94 109.96 109.98 110 110.02 110.04 110.06
Time[s]
Speed[rad/s] Parallel method
MT method SR method
ため,高周波の変動も含めて併用方式の方が MT 単体方式に 比べて変動の少ない定常特性となっている.
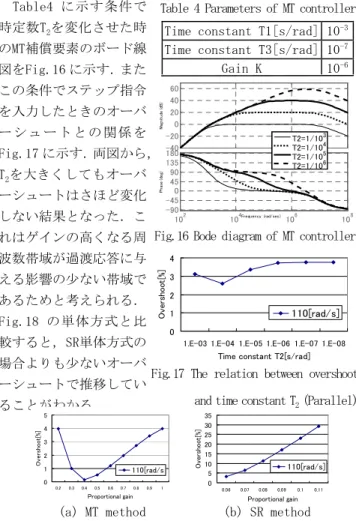
4.1.4 時定数T2と過渡特性の関係 Table4 に示す条件で
時定数T2を変化させた時 のMT補償要素のボード線 図をFig.16 に示す.また この条件でステップ指令 を入力したときのオーバ ー シ ュ ー ト と の 関 係 を Fig.17 に示す.両図から,
T2を大きくしてもオーバ ーシュートはさほど変化 しない結果となった.こ れはゲインの高くなる周 波数帯域が過渡応答に与 える影響の少ない帯域で あるためと考えられる.
Fig.18 の単体方式と比 較すると,SR単体方式の 場合よりも少ないオーバ ーシュートで推移してい ることがわかる.
Fig.18 The relation between overshoot and proportional gain (MT,SR)
4.2 実験による検討 4.2.1 実験装置の構成
Fig.19 に実験装置の構成を示す.DC モータの速度制御を 行うマイクロコンピュータ A 側は,速度検出部の自作円板,
フォトマイクロセンサを基に構成された速度制御用装置で あり,マイクロコンピュータ B 側は,高分解能エンコーダ (100,000P/R)によって高精度な速度検出のみを行う計測用 装置である.また D/A 変換器は 16 ビット,基準電圧 10[V]の ものを用いる.
Fig.19 System configuration of experimental equipment
4.2.2 一スリット誤差を付加した時の速度制御の定常特性 Table5 に示す条件で速度制御実験を行った際の過渡応答 を Fig.20 に,定常状態を Fig.21 に示す.図から,併用方式 のオーバーシュートは MT 単体方式よりは大きいが SR 単体方 式よりも若干であるが低減されていることが確認できた.ま た,定常状態に関して,併用方式は MT 単体方式よりも大幅 に速度変動を低減することができた.
Table 4 Parameters of MT controller
Table 5 Experimental Parameters
Fig.21 Steady state
5. 結言
MT/SR 併用速度検出方式を利用し,MT 補償要素として二次 のハイパスフィルタを用いたディジタル速度制御系におい てシミュレーション,実験を行い,その過渡特性,定常特性 について MT 方式,SR 方式と比較検討した.
(1) スリット誤差の周波数成分が MT 補償要素のカットオフ 周波数より低周波側にあれば速度変動が低減される.
(2) スリット誤差の周波数成分,モータイナーシャがある条 件において,過渡特性,定常特性共に,MT 単体方式と SR 単体方式の中間の特性であることを示した.
今後は,より広い条件で優位性を持つ併用速度制御系の検 討を進める.
参考文献
(1) 益田 他 3, ロータリーエンコーダの高精度構成装置の 開発(第1報)精密工学会誌, 67-7(2001)pp.1091-1095.
(2) Ohmae, et al,IE3 Tr.IE, IE29-3(1982)
(3) 岡澤,蜂谷,大前,MT/SR 併用速度検出を用いたモータ のディジタル速度制御,電気学会産業応用部門大会講演 論文集(2006)p.52
Speed reference[rad/s] 100→110 Sampling time[ms] 1 Slit space error[%] 20 Resolution of encoder[P/R] 16
0 1 2 3 4 5
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Proportional gain
Overshoot[%]
110[rad/s
Pho to micro-senso r
DC motor
Cou pling
Electro magnetic b rake Pulse sig nal
M icroco mputer A
D/A co nverter
Driver M icroco mputer B
Rotary plate with Slit 32[P/R]
Controller
Driving part
Load part
Sensor Detection part
(Self-made enco der)
Enco der 10 0,0 00[P/ R]
Pho to micro-senso r
DC motor
Cou pling
Electro magnetic b rake Pulse sig nal
M icroco mputer A
D/A co nverter
Driver M icroco mputer B
Rotary plate with Slit 32[P/R]
Controller
Driving part
Load part
Sensor Detection part
(Self-made enco der)
Enco der 10 0,0 00[P/ R]
0 5 10 15 20 25 30 35
0.06 0.07 0.08 0.09 0.1 0.11
Proportional gain
Overshoot[%]
110[rad/s]
106 107 108 109 110 111
1.5 1.6 1.7 1.8 1.9 2 Time[s]
Speed[rad/s]
106 107 108 109 110 111
1.5 1.6 1.7 1.8 1.9 2 Time[s]
Speed[rad/s]
SR method MT method 100
102 104 106 108 110 112 114
0 0.1 0.2 0.3 0.4 0.5 Time[s]
Speed[rad/s]
-40 -20 0 20 40 60
Magnitude (dB)
102 104 106 108
-90 -45 0 45 90 135 180
Phase (deg)
Bode Diagram
Time constant T1[s/rad] 10-3 Time constant T3[s/rad] 10-7 Gain K 10-6
Frequency (rad/sec)
T2=1/103 T2=1/104 T2=1/105 T2=1/106
100 102 104 106 108 110 112 114
0 0.1 0.2 0.3 0.4 0.5 Time[s]
Speed[rad/s]
SR method MT method
Fig.16 Bode diagram of MT controller
0 1 2 3 4
1.E-03 1.E-04 1.E-05 1.E-06 1.E-07 1.E-08 Time constant T2[s/rad]
Overshoot[%]
110[rad/s]
(a) Parallel method (b) MT,SR method Fig.20 Transient response
Fig.17 The relation between overshoot and time constant T2 (Parallel)
(a) Parallel method (b) MT,SR method
(a) MT method (b) SR method
![Table 2 Simulation parameters Speed reference[rad/s] 20→30](https://thumb-ap.123doks.com/thumbv2/123deta/6355932.2129046/2.892.463.817.191.474/table-simulation-parameters-speed-reference-rad-s.webp)
![Table 3 Simulation parameters Speed reference[rad/s] 100→110](https://thumb-ap.123doks.com/thumbv2/123deta/6355932.2129046/3.892.476.826.181.407/table-simulation-parameters-speed-reference-rad-s.webp)