自動車の懸架系制御システムの最適設定と要素技術開発に関する研究-香川大学学術情報リポジトリ
171
0
0
全文
(2) OLIVE 香川大学学術情報リポジトリ. 自動車の懸架系制御システムの最適設計と 要素技術開発に関する研究. 武馬 修一.
(3) OLIVE 香川大学学術情報リポジトリ 目次. 第 1章. 緒言. 12. 1.1. 制御サスペンションの歴史. 12. 1.2. 研究目的. 20. 1.3. 論文の構成. 20. 1.4. 参考文献. 22. 第 2章. 車両振動乗り心地における課題. 27. 2.1. 車両振動の分類. 27. 2.2. 路面入力時の人体振動感度と乗り心地評価. 27. 2.2.1. 人間の振動感覚特性. 27. 2.2.2. 乗り心地評価特性及び目標値. 29. 2.3. 慣性入力時の乗り心地性能. 30. 2.3.1. 評価条件. 30. 2.3.2. 評価結果とロール姿勢の目標値. 30. 2.4. 最近の振動評価. 32. 2.4.1. 人の視覚・動揺感受特性. 32. 2.4.2. 旋回時のドライバ挙動特性への解析提案. 32. 2.5. 新たな制御目標値の提案. 33. 2.6. まとめ. 36. 2.7. 参考文献. 37. 第 3章 3.1. サスペンションの力学モデルに関する基礎理論. 39. 基本的なサスペンションの上下方向の振動抑制モデル. 39. 3.1.1. 単輪 2 自由度のサスペンションのモデル. 3.1.2. パッシブサスペンションのばね定数及び減衰係数変更時の乗り心地への影響. 3.1.3. パッシブサスペンションからの提言. 42. アクティブサスペンションの振動抑制モデル. 43. 3.2. 39. 3.2.1. スカイフックモデル. 43. 3.2.2. アクティブサスペンションのスカイフック制御の目標性能. 45. 3.3. 旋回ロール時のサスペンションに働く力学モデル. 46. 3.3.1. 記号説明. 46. 3.3.2. 横加速度によるタイヤ接地面の荷重変動. 47. 1.
(4) OLIVE 香川大学学術情報リポジトリ 3.3.3 3.4. 参考文献. 第 4章 4.1. 旋回ロール時のタイヤ接地面の荷重変動についてのまとめ. 49 50. サスペンションシステムの車両適用に関する研究. 51. パッシブとセミアクティブサスペンションの乗り心地と操縦・安定性性能. 4.1.1. はじめに. 51. 4.1.2. 電子制御エアサスペンションシステム. 52. 4.1.3. 評価結果(乗り心地性能と姿勢制御の効果). 58. 4.1.4. セミアクティブエアサスペンションの性能まとめ. 61. 4.2. 油空圧アクティブサスペンションシステムの乗り心地と操縦・安定性性能. 62. 4.2.1. はじめに. 62. 4.2.2. 油空圧アクティブサスペンションシステム. 64. 4.2.3. システム構成部品の概要. 67. 4.2.4. 乗り心地制御のシミュレーション解析. 73. 4.2.5. 評価結果(乗り心地性能と姿勢制御の効果). 85. 4.2.6. 油空圧アクティブサスペンションシステムのまとめ. 87. 4.2.7. アクティブサスペンション性能のまとめ. 87. 4.3. まとめ. 88. 4.4. 参考文献. 89. 第 5章. 電動アクティブサスペンションの研究と開発. 93. 5.1. はじめに. 93. 5.2. 電動アクティブスタビライザサスペンションシステムの研究と開発. 94. 5.2.1 ア ク チ ェ ー タ の 要 求 性 能. 94. 5.2.1.1. アクチェータトルク算出式. 5.2.1.2. 横加速度に対する目標ロール角特性. 5.2.1.3. 減速ギヤの正効率と逆効率特性. 5.2.1.4. 電動アクチェータの要求トルク. 5.2.2. 電動アクチェータの仕様とその評価. 5.2.2.1. アクチェータの目標諸元. 5.2.2.2. 電動モーターの基本構成. 5.2.2.3. 電動モーターの仕様検討. 5.2.2.4. 電動アクチェータのベンチ評価. 5.2.3. シミュレーション. 104. 110 2.
(5) OLIVE 香川大学学術情報リポジトリ 5.2.3.1. シミュレーション環境. 5.2.3.2. 電動アクチェータモデル. 5.2.3.3. ストレインウェーブギヤリングのモデル. 5.2.3.4. 制御仕様. 5.2.3.5. シミュレーション結果. 5.2.4. 5.3. 実車評価. 5.2.4.1. ロール制御の効果. 5.2.4.2. 電流低減制御の効果. 5.2.4.3. 乗り心地性能. 5.2.5. 110. 115. 電動アクティブスタビライザサスペンションシステムのまとめ. 電動アクティブサスペンションシステムの研究. 118 119. 5.3.1. はじめに. 119. 5.3.2. システム概要. 119. 5.3.3. 目標性能. 121. 5.3.4. 乗り心地制御(スカイフック制御)の検証. 121. 5.3.4.1. 評価路面及びシミュレーション,ベンチ加振の条件. 5.3.4.2. パッシブダンパの減衰比の仕様. 5.3.4.4. ロータリ式電動アクチェータの応答性. 5.3.4.5. スカイフックロジックの見直し. 5.3.4.6. ベンチ加振条件の検証結果. 5.3.4.7. 実路評価結果. 5.3.4.8. 消費電力の結果. 5.3.4.9. アクチェータの要求性能. 5.3.5. 慣性入力制御の検証. 131. 5.3.6. リ ヤ 輪 の プ レ ビ ュ ー FF ス カ イ フ ッ ク 制 御 の 検 討. 132. 5.3.7. 電動アクティブサスペンションのまとめ. 134. 5.4. 参考文献. 第 6章. 135. ロールの大きさによるドライバ挙動及び特性の研究. 138. 6.1. はじめに. 138. 6.2. 車両でのドライバの挙動解析. 138. 6.2.1. 評価車両仕様. 138. 6.2.2. 走行条件. 138. 6.2.3. 挙動解析結果. 141 3.
(6) OLIVE 香川大学学術情報リポジトリ 6.3. HDRS で の ド ラ イ バ の 挙 動 解 析. 145. 6.3.1. 実験条件. 145. 6.3.2. 実験装置. 146. 6.3.3. 実験結果. 148. 6.4. ドライバの頭部挙動の考察. 150. 6.5. 車両のロール角の大きさと車両運動,運転操作系への影響. 151. 6.5.1. 頭部ヨー角の転向点と舵角の転向点. 151. 6.5.2. 頭部のロール補正角速度と操舵ディレイとの関係. 152. 6.6. まとめ. 153. 6.7. 参考文献. 154. 第 7章. 結言. 156. 7.1. 本論文の要約. 156. 7.2. 今後の研究課題. 158. 本研究に関する主論文及び発表論文一覧. 159. 付 録 A(第 5 章 の 付 録 ). 163. 1.ア ク テ ィ ブ ス タ ビ ラ イ ザ サ ス ペ ン シ ョ ン の 働 き 2.ア ク テ ィ ブ ス タ ビ ラ イ ザ サ ス ペ ン シ ョ ン の ギ ヤ の 構 成 3.電 動 ア ク テ ィ ブ サ ス ペ ン シ ョ ン の ア ク チ ェ ー タ の 取 り 付 け 構 成 4.電 動 ア ク テ ィ ブ サ ス ペ ン シ ョ ン の 変 位 伝 達 比 の 効 果 映 像. 付 録 B(第 6 章 の 付 録 ). 167. 1.頭 部 位 置 計 測 シ ス テ ム EMR-HC8 の 機 器 説 明 と 測 定 精 度. 謝辞. 169. 4.
(7) OLIVE 香川大学学術情報リポジトリ 図番号. 図. 番号. 一覧. 図. タイトル. 第 1章. ページ. 緒言. 図 1-1.. GMC バ ス 用 の Firestone 製 ベ ロ ー ズ. 12. 図 1-2.. 1967 年 セ ン チ ュ リ ー の エ ア サ ス. 12. 図 1-3.. 1986 年 ソ ア ラ の エ ア サ ス シ ス テ ム 図. 13. 図 1-4.. 1986 年 ソ ア ラ の ニ ュ ー マ チ ッ ク シ リ ン ダ 断 面 図. 13. 図 1-5.. 1989 年 セ リ カ の 油 空 圧 式 ア ク テ ィ ブ サ ス ペ ン シ ョ ン 構 成 図. 14. 図 1-6.. 1989 年 セ リ カ の ハ イ ド ロ ニ ュ ー マ チ ッ ク シ リ ン ダ 断 面 図. 15. 図 1-7.. 1999 年 ベ ン ツ CL の 油 圧 式 の シ リ ン ダ 構 成 図. 15. 図 1-8.. 2005 年 レ ク サ ス GS の 電 動 ア ク テ ィ ブ ス タ ビ ラ イ ザ サ ス ペ ン シ ョ ン システム構成図. 17. 図 1-9.. レ ク サ ス GS 用 の 電 動 ア ク チ ェ ー タ 断 面 写 真. 17. 図 1-10.. 2007 年 研 究 発 表 の 電 動 ア ク テ ィ ブ サ ス ペ ン シ ョ ン シ ス テ ム 構 成 図. 18. 図 1-11.. 世界の制御サスペンションの展開状況. 19. 第 2章. 車両振動乗り心地における課題. 図 2-1.. 車両振動の方向による分類. 27. 図 2-2(a).. ISO 乗 り 心 地 指 標 ( 垂 直 方 向 ). 28. 図 2-2(b).. ISO 乗 り 心 地 指 標 ( 横 方 向 ). 28. 図 2-3.. 上下振動の人体の振動許容限界特性. 28. 図 2-4.. Meister 振 動 感 覚 特 性 線 図. 29. 図 2-5.. ロール率とロール感の関係. 31. 図 2-6.. ロール率と官能評価の関係. 31. 図 2-7.. 人の視覚・動揺感受特性. 32. 図 2-8.. 横加速度と頭部のロール補正角. 33. 図 2-9.. 車両ロール角速度とドライバ頭部のロール補正角速度の相関関係. 34. 図 2-10.. 横加速度のジャークと絶対座標での頭部ロール角速度の関係. 34. 図 2-11.. 横加速度のジャークと車両のロール角速度の関係. 35. 第 3章 図 3-1.. サスペンションの力学モデルに関する基礎理論. 2 自由度のサスペンションモデル 5. 39.
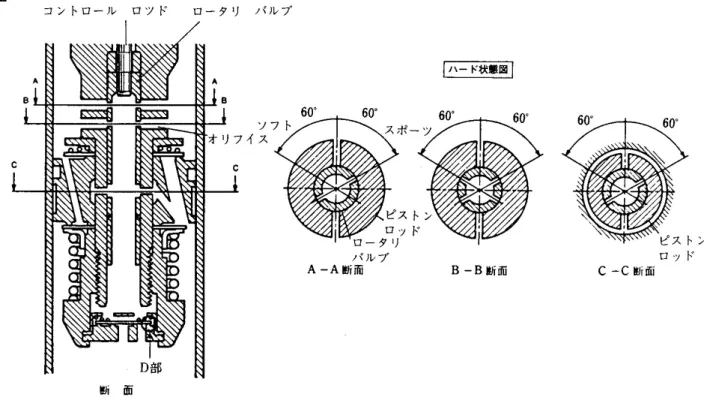
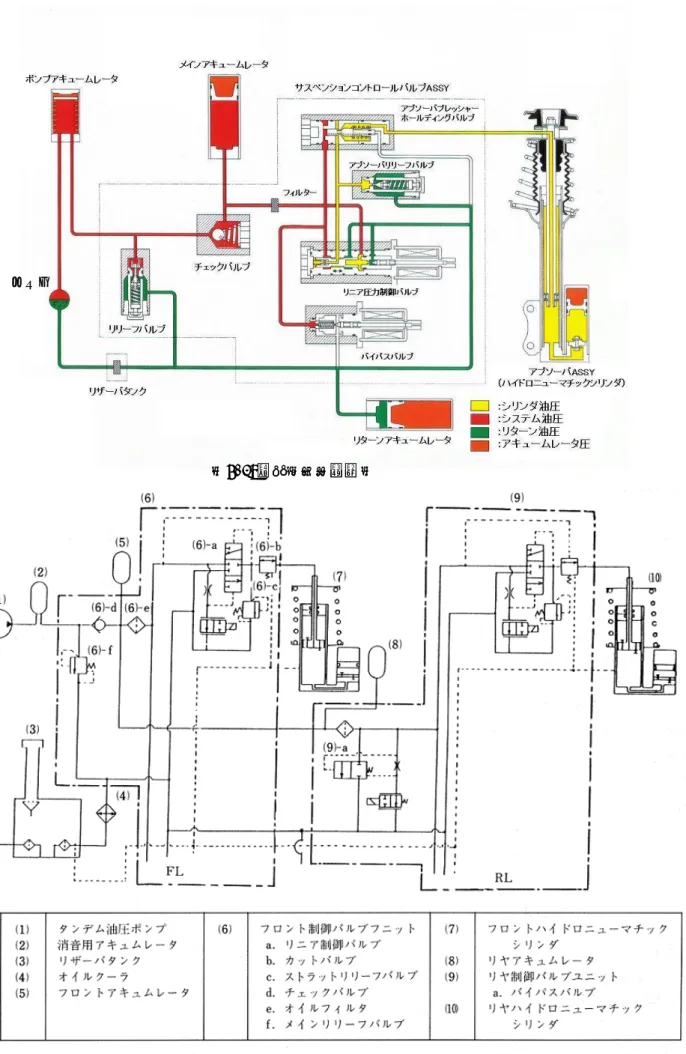
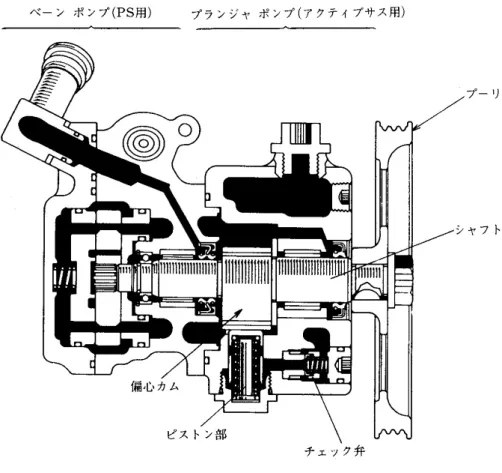
(8) OLIVE 香川大学学術情報リポジトリ 図 3-2.. 路面変位からばね上変位までの伝達特性. 40. 図 3-3.. ばね定数・減衰係数のばね上加速度への影響(シミュレーション). 41. 図 3-4.. 1 自由度スカイフックダンパモデル. 43. 図 3-5.. 2 自由度電動アクティブサスペンションモデル. 44. 図 3-6.. スカイフック制御の変位伝達比特性(シミュレーション結果). 45. 図 3-7.. 旋回モデルの重心位置と車両諸元. 47. 図 3-8.. 旋回モデルのロールによる上下・左右の荷重変動. 47. 第 4章. サスペンションシステムの車両適用に関する研究. 図 4-1.. 簡易のサスペンションシステムモデル. 51. 図 4-2.. エアサスペンションのシステム概要. 52. 図 4-3.. 減衰力,ばね定数可変アクチェータの構造図. 53. 図 4-4.. エアばね定数算出の基本諸元図. 54. 図 4-5.. ローリングローブ式のダイアフラムの内圧と耐久性. 54. 図 4-6.. ばね定数切り替え機構断面図. 55. 図 4-7.. 減衰力切り替え機構断面図. 56. 図 4-8.. ばね定数と減衰力の 3 段階可変特性. 56. 図 4-9.. ばね上共振周波数特性. 58. 図 4-10.. 良路乗心地特性. 59. 図 4-11.. 段差路通過時の路面感応特性. 60. 図 4-12.. アンチロール制御有無の性能比較. 60. 図 4-13.. 油圧式アクティブサスペンション実験車. 62. 図 4-14.. FXV 油 空 圧 シ ス テ ム. 62. 図 4-15.. FXVⅡ ア ク テ ィ ブ エ ア サ ス. 63. 図 4-16.. ロータスアクティブサスペンション. 63. 図 4-17.. 油圧作動状態図. 65. 図 4-18.. 油圧系システム回路図. 65. 図 4-19.. 制御ブロックダイアグラム. 66. 図 4-20.. フロントハイドロニューマチックシリンダ断面図. 67. 図 4-21.. タンデム油圧ポンプ断面図. 70. 図 4-22.. リニア圧力制御弁断面図. 71. 図 4-23.. 圧力制御弁の姿勢制御の作動原理. 71. 図 4-24.. 圧力制御弁の乗り心地制御の作動原理. 72. 6.
(9) OLIVE 香川大学学術情報リポジトリ 図 4-25.. ばね上荷重フリー1輪ベンチ. 73. 図 4-26.. 乗心地制御の 1 輪ベンチ効果. 73. 図 4-27.. 2自由度サスペンションモデル. 73. 図 4-28.. 減衰力制御マップ. 75. 図 4-29.. ばね上振巾伝達率の周波数特性. 76. 図 4-30.. 接地荷重変動量の周波数特性. 76. 図 4-31.. 油空圧アクティブサスペンションの消費エネルギ. 77. 図 4-32.. 消費油量特性. 77. 図 4-33.. 単輪油圧系モデル. 79. 図 4-34.. アクチェータの周波数応答(シミュレーション). 81. 図 4-35.. アクチェータの周波数応答(実験). 82. 図 4-36.. 2 自由度油空圧アクティブサスペンションモデル. 82. 図 4-37.. サスペンションモデルと油圧系モデルの比較(シミュレーション). 83. 図 4-38.. 減衰係数とばね定数の効果(シミュレーション). 83. 図 4-39.. スプール変位の周波数応答(シミュレーション). 84. 図 4-40.. X b /Y の 周 波 数 応 答 ( シ ミ ュ レ ー シ ョ ン ). 84. 図 4-41.. シ リ ン ダ 内 圧 /ソ レ ノ イ ド 吸 引 力 の 周 波 数 応 答 (シミュレーション). 84. 図 4-42.. アクティブ油圧系に設けたオリフィスの効果. 85. 図 4-43.. ガスばね容量の効果. 85. 図 4-44.. 乗心地制御の効果. 86. 図 4-45.. 旋回時の姿勢制御の効果. 86. 図 4-46.. 旋回時のロール角の効果. 87. 図 4-47.. 制動時と発進時のピッチ角の効果. 87. 第 5章. 電動アクティブサスペンションの研究と開発. 図 5-1.. システム構成部品配置図. 94. 図 5-2.. 横加速度が作用するばね上質量の重心位置と車両諸元. 95. 図 5-3.. タイヤ上下力変動量を算出する正面視モデル. 95. 図 5-4.. 目標ロール角. 99. 図 5-5.. 市場での横加速度頻度. 99. 図 5-6.. 減速ギヤの正逆効率. 100. 図 5-7.. ア ク テ ィ ブ ト ル ク の 算 出 ( β =0.52). 101. 7.
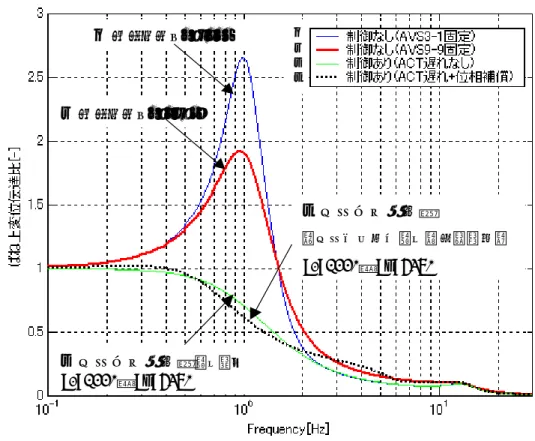
(10) OLIVE 香川大学学術情報リポジトリ 図 5-8.. 接地荷重配分とアクチェータトルク. 102. 図 5-9.. 市場での舵角速度頻度. 103. 図 5-10.. スラローム,レーンチェンジ走行の横 G ジャーク値. 103. 図 5-11.. ア ク チ ェ ー タ 構 成 断 面 図 (フ ロ ン ト ). 104. 図 5-12.. モーターコア径とスロット数. 105. 図 5-13.. コギングトルクとマグネット幅. 106. 図 5-14.. 電動アクチェータのベンチ試験機. 108. 図 5-15.. 電圧違いによる出力トルク. 109. 図 5-16.. アクチェータの周波数応答. 109. 図 5-17.. 電動アクティブスタビライザサスペンション車の. 110. シミュレーション環境 図 5-18.. Dymola の 電 動 ア ク チ ェ ー タ モ デ ル. 111. 図 5-19.. 正効率と逆効率の損失. 113. 図 5-20.. 制御ロジックのブロックダイアグラム. 114. 図 5-21.. ロール姿勢制御のジェネラルフロー. 114. 図 5-22.. 電流低減ロジックのシミュレーション結果. 115. 図 5-23.. 横加速度とロール角(レーンチェンジ走行). 115. 図 5-24.. パイロンスラローム走行時の車両の位置と姿勢. 116. 図 5-25.. 電流低減ロジックの実車評価結果. 116. 図 5-26.. 各路面での消費エネルギ. 117. 図 5-27.. 路面入力に対する伝達特性. 117. 図 5-28.. 実路面走行時のばね上 G. 118. 図 5-29.. 電動アクティブサスペンションのシステム構成図. 120. 図 5-30.. ロータリアクチェータ(フロント). 120. 図 5-31.. 評価路面の周波数特性. 121. 図 5-32.. 接地荷重変動率と減衰比の関係(2 自由度モデル). 122. 図 5-33.. 電動アクチェータの応答性. 124. 図 5-34.. フィードバックとフィードフォワードスカイフック 制御のブロック図. 125. 図 5-35.. スカイフック制御の接地性検証用作動図. 125. 図 5-36.. 変 位 伝 達 比 特 性 (シ ミ ュ レ ー シ ョ ン ). 126. 図 5-37.. 変 位 伝 達 比 特 性 (ベ ン チ 実 車 評 価 ). 127. 図 5-38.. バ ウ ン ス 方 向 の ば ね 上 G の PSD (評 価 路 実 車 評 価 ). 127. 8.
(11) OLIVE 香川大学学術情報リポジトリ 図 5-39.. 4 輪総和の平均消費電流と平均回生電流. 128. 図 5-40.. 電動と油圧システムの消費電力の比較. 129. 図 5-41.. 回 生 電 流 の 発 生 条 件 (0.6~ 30Hz). 129. 図 5-42.. アクチェータの発生トルク頻度. 130. 図 5-43.. ベンチ加振の変位伝達比と実働上下力勾配との結果. 130. 図 5-44.. 横 加 速 度 に 対 す る ロ ー ル 角 (実 車 実 験 ). 131. 図 5-45.. 車 両 ロ ー ル 角 に 対 す る 車 両 の ロ ー ル 角 速 度 (実 車 実 験 ). 132. 図 5-46.. プ レ ビ ュ ー FF ス カ イ フ ッ ク ロ ジ ッ ク ブ ロ ッ ク ダ イ ア グ ラ ム. 132. 図 5-47.. プ レ ビ ュ ー FF ス カ イ フ ッ ク ロ ジ ッ ク 乗 り 心 地 評 価 結 果. 133. 図 5-48.. プ レ ビ ュ ー FF ス カ イ フ ッ ク の 消 費 電 力. 133. 第 6章. ロールの大きさによるドライバ挙動及び特性の研究. 図 6-1.. 車両とドライバの動揺方向と測定部位. 139. 図 6-2.. パイロンスラロームコース. 139. 図 6-3.. 近年の車両のロール量推移. 140. 図 6-4.. ドライバの頭部挙動の計測環境. 141. 図 6-5.. 舵 角 -横 加 速 度 -車 両 ロ ー ル 角 の 関 係 (目 標 ロ ー ル 角 4deg). 142. 図 6-6.. 舵 角 -頭 部 ヨ ー 角 -頭 部 ロ ー ル 補 正 角 の 関 係 (目 標 ロ ー ル 角 1deg). 142. 図 6-7.. 舵 角 -頭 部 ヨ ー 角 -頭 部 ロ ー ル 補 正 角 の 関 係 (目 標 ロ ー ル 角 4deg). 143. 図 6-8.. 舵 角 -頭 部 ヨ ー 角 -車 両 ヨ ー 角 の 関 係 (目 標 ロ ー ル 角 1deg). 143. 図 6-9.. 車 両 の ロ ー ル 角 (θ v)と 頭 部 の ロ ー ル 補 正 角 (θ hv). 144. 図 6-10.. 車 両 の ロ ー ル 角 速 度 (⊿ θ v)と 頭 部 ロ ー ル 補 正 角 速 度 (⊿ θ hv)の. 144. 関係 図 6-11.. ロ ー ル 方 向 加 振 シ ミ ュ レ ー タ ( HDRS). 146. 図 6-12.. HDRS 実 機 及 び 実 験 風 景. 147. 図 6-13.. 視覚刺激条件. 注視点の位置. 147. 図 6-14.. 視覚刺激条件. 走行コース. 147. 図 6-15.. ド ラ イ バ 頭 部 挙 動 HDRS テ ス ト ① , テ ス ト ② , テ ス ト ③. 148. 図 6-16.. 実 車 と HDRS テ ス ト の ド ラ イ バ 頭 部 挙 動 比 較. 149. 図 6-17.. 頭 部 ロ ー ル 補 正 角 速 度 ( ⊿ θ hv) と 横 加 速 度 の ジ ャ ー ク ( ⊿ GL) と の. 150. 関係 図 6-18.. 頭部ヨー角,舵角,頭部ロール補正角の時系列データ (目 標 ロ ー ル 角 4deg) 9. 151.
(12) OLIVE 香川大学学術情報リポジトリ 図 6-19.. 各 人 の 操 舵 デ ィ レ イ td2,td3,td4 の 平 均 値. 151. 図 6-20.. 目 標 ロ ー ル 角 4[deg]と 1[deg]の 操 舵 デ ィ レ イ 差. 152. 図 6-21.. 頭部のロール補正角速度と操舵ディレイとの関係. 152. 付録 図 A-1.. スタビライザの働き. 163. 図 A-2.. ストレインウェーブギヤリングの構成. 164. 図 A-3.. フロントアクチェータ搭載. 165. 図 A-4.. リヤアクチェータ搭載. 165. 図 A-5.. ベンチ評価の変位伝達比の効果映像. 166. 図 B-1.. 頭 部 位 置 計 測 シ ス テ ム EMR-HC8. 167. 図 B-2.. 頭 部 ロ ー ル 回 転 角 ( EMR-HC8 計 測 ). 168. 図 B-3.. 背面ビデオでの静止画. 168. 図 B-4.. 頭部ロール回転角データ事例. 168. 10.
(13) OLIVE 香川大学学術情報リポジトリ 表番号. 表. 番号. 表. 一覧. タイトル. ページ. 表 3-1. サスペンション諸元. 39. 表 3-2. 電動アクティブサスペンション単輪諸元. 44. 表 3-3. 旋回モデル及び式の記号と単位. 46. 表 4-1. ばね定数・減衰力切り替え制御仕様. 57. 表 4-2. 車高制御仕様. 58. 表 4-3. システムの主要構成部品と機能. 68. 表 5-1. 電動アクチェータのトルク計算式記号と代表値. 96. 表 5-2. ア ク チ ェ ー タ の 要 求 仕 様 (フ ロ ン ト ). 104. 表 5-3. アクチェータのモーター仕様(フロント). 107. 表 5-4. ベンチテスト結果. 108. 表 5-5. 正効率と逆効率の判別条件. 112. 表 5-6. 各種サスペンションシステムの機能. 119. 表 5-7. 電動アクティブサスペンションの基本諸元. 123. 表 6-1. 実 車 試 乗 メ ン バ ー 構 成 (‘ 07 年 テ ス ト ). 140. 表 6-2. 実 車 と HDRS の 試 験 条 件. 145. 表 6-3. HDRS 試 乗 メ ン バ ー 構 成 (‘ 07 年 テ ス ト ). 146. 表 6-4. HDRS 結 果 の 実 車 頭 部 ロ ー ル 補 正 角 に 対 す る 割 合. 150. 11.
(14) OLIVE 香川大学学術情報リポジトリ 第 1章. 緒言. この章は日米欧の技術開発推移からの制御サスペンションの歴史と研究目的及び論文の 構成について述べる。 1.1. 制御サスペンションの歴史. 最初の制御サスペンションは車高を一定にするエアサスペンション(以降エアサス)か ら ス タ ー ト し た 。世 界 で 最 初 の エ ア サ ス は 1953 年 の GMC コ ー チ ( 1 ) に バ ス 用 と し て 採 用 さ れ た 。 図 1-1 に そ の 車 の ベ ロ ー ズ タ イ プ の エ ア ス プ リ ン グ を 示 す 。 エ ア サ ス の 特 徴 は ① 車高を一定に保つ。 ② 非線形ばね定数特性により、積載荷重にかかわらずばね上共振点をほぼ一定に保つ。 ③ ばね定数を金属ばねに比べて比較的低くとれる。 ④ 高周波の振動遮断性がよい。 等 に よ る 乗 心 地 の 良 さ を 買 わ れ 、1957 年 ~ 1958 年 に か け て の 一 時 期 、米 国 乗 用 車 に 一 斉 に 採 用 さ れ た (2)-. (5). 。 そ の 代 表 は 乗 用 車 と し て 世 界 で 初 め て 採 用 し た 1957 年 GM キ ャ デ ラ. ックであった。しかし当時の技術レベルは、システムやコンポーネントの信頼性に問題が あ っ た 事 と コ ス ト が 高 い 等 の 理 由 に よ り 、 わ ず か 1~ 2 年 で 採 用 中 止 と な っ た 。 欧 州 で は 1963 年 Benz300SE ( 6 ) で 機 械 式 レ ベ リ ン グ バ ル ブ の エ ア サ ス が 採 用 さ れ た が 、 そ の 後 Benz560SEL に 代 表 さ れ る ハ イ ド ロ ニ ュ ー マ チ ッ ク サ ス ペ ン シ ョ ン へ と 変 更 し て い っ た 。し か し 、 1999 年 Benz S に 再 度 、 減 衰 力 可 変 シ ス テ ム を 含 め た 制 御 サ ス ペ ン シ ョ ン シ ス テ ム としてのエアサスが採用され、欧州でのエアサス展開の火付け役となった。 日 本 で は 、1955 年 か ら 空 気 ば ね 懸 架 装 置 の 開 発 を 開 始 し 、1957 年 民 生 デ ィ ー ゼ ル が 国 内 生 産 第 1 号 を 送 り 出 し た 。そ の 頃 の 研 究 成 果 が 1958 年 に 鉄 道 技 術 研 究 所 か ら 報 告 さ れ て い る ( 7 ) 。乗 用 車 と し て は 1967 年 初 代 ト ヨ タ セ ン チ ュ リ ー ( 8 ) の フ ロ ン ト サ ス ペ ン シ ョ ン に 、初 め て エ ア サ ス が 搭 載 さ れ た 。 図 1-2 に エ ア ス プ リ ン グ ユ ニ ッ ト を 示 す 。. 図 1-1. GMC バ ス 用 の Firestone 製 ベ ロ ー ズ. 図 1-2. 1967 年 セ ン チ ュ リ ー の エ ア サ ス. そ の 後 、 電 子 機 器 の 信 頼 性 が 高 ま り 、 電 子 制 御 の シ ス テ ム が 1980 年 代 か ら 量 産 化 さ れ 、 12.
(15) OLIVE 香川大学学術情報リポジトリ 制 御 サ ス ペ ン シ ョ ン の 世 界 的 な 競 争 の 時 代 に 入 っ て き た 。最 初 の 電 子 制 御 エ ア サ ス は 1982 年の日産レパードとトヨタセンチュリーが採用した後輪の車高調整システムである。 ア メ リ カ で は 1983 年 フ ォ ー ド リ ン カ ー ン マ ー ク Ⅶ で 、 実 に 25 年 ぶ り に エ ア サ ス を 世 に 送り出してきた。この時期以降から日本,アメリカ,欧州で更に展開が広がってきた。ま た、技術革新は車高調整のみから、減衰力とばね定数を可変にするセミアクティブサスペ ン シ ョ ン へ と 進 化 し た 。そ の 代 表 は 、1983 年 三 菱 ギ ャ ラ ン ( 9 ) に 採 用 さ れ た 補 助 ば ね の エ ア サ ス タ イ プ の ECS シ ス テ ム で あ る 。 ま た 、 現 在 主 流 の フ ル エ ア サ ス タ イ プ の 制 御 シ ス テ ム は 1986 年 ト ヨ タ ソ ア ラ ( 1 0 ). (11). に採用された「トヨタ電子制御エアサスペンションシステ. ム 」 で あ る 。 シ ス テ ム 図 を 図 1-3 に 示 す 。 図 1-4 に エ ア ば ね と ア ブ ソ ー バ 断 面 図 を 示 す 。 サスペンション コントロール アクチェータ. TEMS インジケータ ランプ. CRT ディスプレイ コンピュータ ストップ ランプ. スイッチ エレクトロ マルチビジョン. ステアリング センサ. ニューマチック シリンダ ウイズ ショックアブソーバ. カーテシ ランプ スイッチ. サスペンション コントロール アクチェータ. サスペンション コントロール スイッチ. ニューマチック シリンダ ウイズ ショック アブソーバ. ダイアグノーシス クリヤ端子. ハイト コントロール バルブ No.2. ハイト コントロール バルブ No.1. ハイト コントロール センサ エアーチューブ. スロットル ポジション センサ. ダイアグ. ノーシス 端子. カーテシ ランプ スイッチ 車速センサ. ドライヤ. コンプレッサ ウイズ モータ. ハイト コントロール センサ (リヤ). ハイト コントロール センサ. サスペンション コントロール コンピュータ. エア ソレノイド バルブ. 図 1-3. 1986 年 ソ ア ラ の エ ア サ ス シ ス テ ム 図. 図 1-4. 1986 年 ソ ア ラ の ニ ュ ー マ チ ッ ク シ リ ン ダ 断 面 図 13.
(16) OLIVE 香川大学学術情報リポジトリ こ の シ ス テ ム は 1983 年 ソ ア ラ に 世 界 で 初 め て 採 用 し た「 走 行 条 件 ,操 作 条 件 に よ り 減 衰 力 を 切 り 替 え る シ ス テ ム : TEMS ( 1 2 ) - ( 1 4 ) ( Toyota Electric Modulated Suspension)」 を 更 に 、 ばね定数可変を追加し、可変範囲を 3 段に増やし、制御ロジックは路面入力にも対応する セ ミ ア ク テ ィ ブ サ ス ペ ン シ ョ ン シ ス テ ム に レ ベ ル ア ッ プ し た 。性 能 等 は 後 述 、第 4 章 の「 電 子制御エアサスペンションのシステム」で述べる。 減 衰 力 制 御 シ ス テ ム は 1975 年 に D.C.Karnopp の セ ミ ア ク テ ィ ブ ジ ェ ネ レ ー タ ( 1 5 ) の 発 表 か ら 急 速 に 発 展 し 、 欧 米 は 日 本 か ら 少 し 遅 れ 1987 年 か ら 各 種 シ ス テ ム ( 1 6 ) - ( 2 0 ) が 提 案 さ れ 、 現在多くの車に採用されている。 究極の制御サスペンションシステムのアクティブサスペンションは早くからその可能性 が 論 じ ら れ 、 多 く の 論 文 と 一 部 の 研 究 実 験 車 が 発 表 さ れ て い る (21)-(37)。 公 表 さ れ た も の と し て 、最 も 古 い の は 1955 年 に 紹 介 さ れ た シ ト ロ ー エ ン 改 造 車 の サ ー ボ 懸 架 装 置 ( 2 1 ) ( 2 2 ) で あ る 。 理 論 的 研 究 は A.G.Thompson の 1971 年 論 文 ( 2 3 ) と 1975 年 論 文 ( 2 4 ) 、 そ し て 1984 年 の P.G.Wright ( 2 5 ) と 1983 年 D.C.Karnopp ( 2 6 ) に よ っ て 提 示 さ れ た 。 そ れ 以 来 、多 く の 基 本 的 で 実 用 的 な 研 究 が 1987 年 A.T.Pham ( 2 7 ) 、1988 年 W.F.Milliken Jr ( 2 8 ) 、1991 年 H.Wallentowitz ( 2 9 ) が 発 表 し て き た 。近 年 公 開 さ れ た ア ク テ ィ ブ サ ス ペ ン シ ョ ン の 最 初 の 構 成 は 1985 年 の ロ ー タ ス ア ク テ ィ ブ サ ス ペ ン シ ョ ン F1 モ デ ル ( 3 0 ) で あ る 。 日 本 の 自 動 車 メ ー カ は 1985 年 、 1987 年 東 京 モ ー タ ー シ ョ ー で そ の コ ン セ プ ト カ ー に ア クティブサスペンションを折込み、技術開発を行って来た。その中で、世界初の市場販売 と 量 産 化 は 1989 年 ト ヨ タ セ リ カ ( 3 1 ) - ( 3 3 ) と 日 産 イ ン フ ィ ニ テ ィ ( 3 4 ) - ( 3 5 ) と な り 、そ れ 以 降 1991 年 に ト ヨ タ ソ ア ラ (36)-(37)等 に 展 開 が 図 ら れ 、 世 界 的 な 量 産 化 へ の 技 術 競 争 に 終 止 符 は 打 た れ た 。図 1-5 に 1989 年 ト ヨ タ セ リ カ で 販 売 し た 、油 空 圧 式 ア ク テ ィ ブ サ ス ペ ン シ ョ ン シ ス テ ム の シ ス テ ム 構 成 図 を 示 す 。 図 1-6 に ハ イ ド ロ ニ ュ ー マ チ ッ ク シ リ ン ダ 断 面 を 示 す 。. 図 1-5. 1989 年 セ リ カ の 油 空 圧 式 ア ク テ ィ ブ サ ス ペ ン シ ョ ン 構 成 図 14.
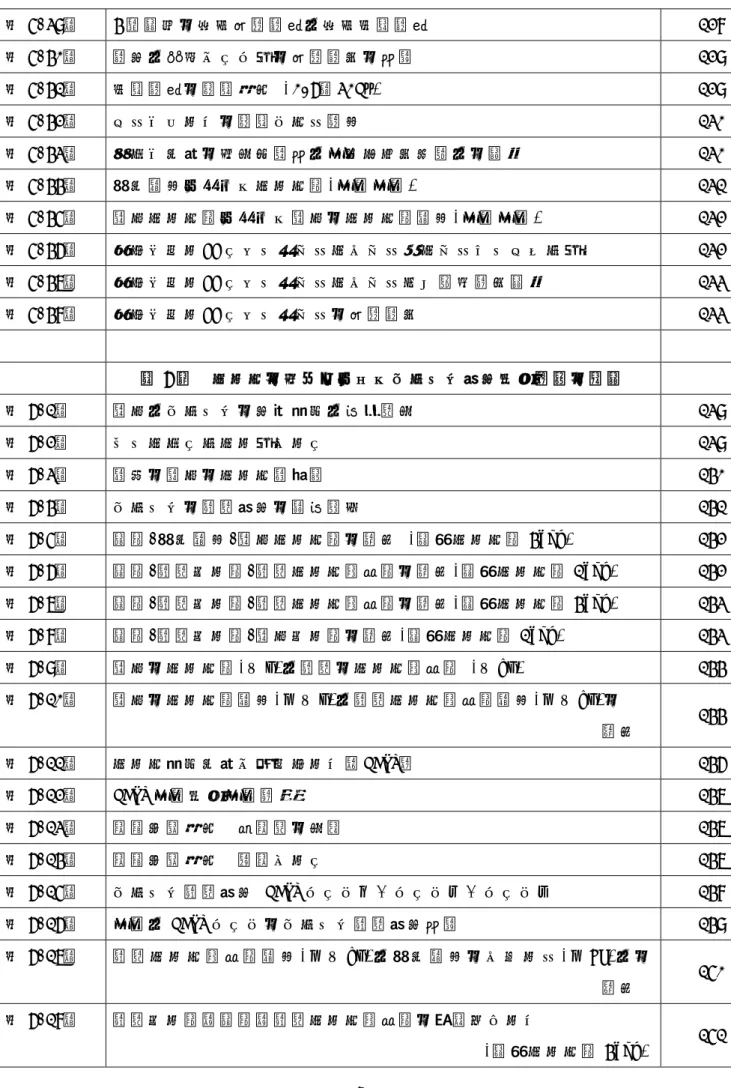
(17) OLIVE 香川大学学術情報リポジトリ 油空圧アクティブサスペンションの性能等は後述第4章の「油空圧アクティブサスペン シ ョ ン シ ス テ ム の 乗 り 心 地 と 操 縦・安 定 性 性 能 」で 述 べ る 。こ の シ ス テ ム は 1990 年 初 頭 の バブル経済の崩壊から、市場はどんどん経済性の高い車への移行が進むにつれ、量産期間 は 長 く 続 か ず 、1996 年 に は ト ヨ タ ソ ア ラ の ア ク テ ィ ブ サ ス ペ ン シ ョ ン 車 の 設 定 が 無 く な り 、 同じく日産のアクティブサスペンション車両の設定も無くなった。このシステムの技術は 完成されたが、市場からこのような背景で姿を消して行った。 そ う し た 中 、 欧 州 で は 1999 年 か ら Benz 社 が CL シ リ ー ズ に 油 圧 式 ア ク テ ィ ブ サ ス ペ ン シ ョ ン の Active Body Control(ABC)を 採 用 し た 。 そ の 後 、 S シ リ ー ズ に 拡 大 し 現 在 に 至 っ て い る 。 図 1-7 に 採 用 し た 油 圧 式 の シ リ ン ダ 構 成 図 を 示 す 。. 図 1-6. 1989 年 セ リ カ の. 図 1-7. 1999 年 ベ ン ツ CL の. ハイドロニューマチックシリンダ断面図. 油圧式のシリンダ構成図. 近年、ハイブリッドを含めたパワートレインの高効率・高出力化、高性能化や車両の高 級化に伴い、より高次元の乗心地と操縦性・安定性の両立と同時に、より一層の省エネル ギ 化 が 要 求 さ れ て き て い る 。そ の 中 で ア ク テ ィ ブ サ ス ペ ン シ ョ ン シ ス テ ム も 4 輪 を 制 御 し 、 全てのばね上のモード(ロール、ピッチ、バウンス、ワープ)をコントロールするシステ ムから、そのモードの中で、車両性能への影響度が高いロールとワープの二つのモードを コントロールすることを目的とし、前輪と後輪のスタビライザバーにアクチェータを搭載 15.
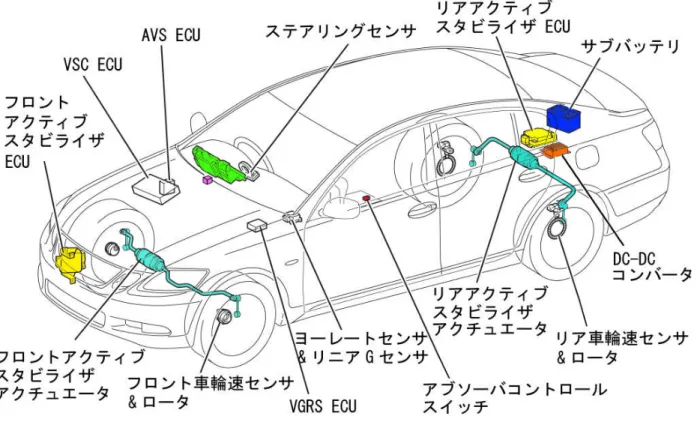
(18) OLIVE 香川大学学術情報リポジトリ し た 、ア ク テ ィ ブ ス タ ビ ラ イ ザ サ ス ペ ン シ ョ ン シ ス テ ム が 2002 年 に BMW745 ( 3 8 ) で 採 用 さ れ た 。BMW6、BMW5、X5 と 展 開 が 図 ら れ 現 在 に い た っ て い る 。こ の シ ス テ ム は 直 進 時 に 常 時 ア クティブに作動していない為、消費エネルギを従来のアクティブサスペンションから低減 したシステムである。 ハイブリッド車,電気自動車,燃料電池車はいずれも常時エンジンを作動してサスペン シ ョ ン に エ ネ ル ギ を 供 給 す る 事 が で き な い た め 、 Power on demand の 発 想 か ら 消 費 エ ネ ル ギを大幅に低減するために、油圧式パワーステアリングが電動パワーステアリングに殆ど の乗用車で移行したように、サスペンション制御のパワーソースも電動化が必須の状況で あ る 。 そ の 中 で 2005 年 レ ク サ ス GS ( 3 9 ) - ( 5 1 ) に て 世 界 初 の 電 動 ア ク テ ィ ブ ス タ ビ ラ イ ザ サ ス ペ ン シ ョ ン シ ス テ ム が 開 発 さ れ 、 量 産 化 さ れ た 。 図 1-8 に シ ス テ ム 構 成 図 と 図 1-9 に ア ク チ ェ ー タ の 断 面 写 真 を 示 す 。 そ の 後 、 2006 年 レ ク サ ス LS と 2009 年 レ ク サ ス RX の ハ イ ブ リッド車に展開されている。 このようにアクティブサスペンションは乗り心地と操縦性・安定性の両立を図るシステ ムから、エネルギ消費を含めたシステム最適化の必要性が増して来ている。最近の研究で 発 表 さ れ た そ の 一 例 の シ ス テ ム を 図 1-10 に 示 す 。こ の よ う に 、電 動 ア ク テ ィ ブ サ ス ペ ン シ ョ ン の 研 究 (52)-(62) や エ ネ ル ギ 回 生 を 行 う 電 磁 サ ス ペ ン シ ョ ン の 研 究. (63)-(66). が多く発表さ. れ公開されてきている。. 世 界 の 制 御 サ ス ペ ン シ ョ ン の 展 開 状 況 を 19 ペ ー ジ の 図 1-11 に 示 す 。 その概要は制御サスペンションシステムをエアサス(空圧式)とハイドロ(油圧式)と電 動 と に 分 類 し 、国 内 、米 国 、欧 州 の 採 用 状 況 を 示 し て い る 。 (矢印はその車両の採用開始を 示す)エアサスは日本が先行し、欧州・米国が追従している。現在、日本の乗用車でのエ ア サ ス の 採 用 は ト ヨ タ の み と な っ て い る の に 対 し 、欧 州 は Benz,BMW,AUDI,RENAUT 等 を 始 め 、 各社が採用車種を増やし現在も展開拡大している。アクティブサスペンション(油空圧式 ア ク テ ィ ブ )は 1989 年 に 日 本 が 先 行 し 量 産 化 し た が 、1996 年 か ら 2005 年 ま で は 、設 定 を やめていた。しかし、市場の高級化,高性能化の要求が高まる中、トヨタはアクティブサ スペンションの最大の課題である消費エネルギの低減を電動化する事で、解決したシステ ム を 2005 年 8 月 か ら 商 品 化 し た 。今 後 、欧 州 車 も ハ イ ブ リ ッ ド 車 の 市 場 ニ ー ズ が 高 ま る と 共に、欧州でも電動システムの要求が高まって来ていると言える。. 本論文はその消費エネルギを大幅に低減したアクティブサスペンションシステムの提案 とドライバのロール時挙動の解析を含めて、研究した成果を述べる。 次 節 以 降 、 1.2 で 研 究 目 的 , 1.3 で 論 文 の 構 成 , 1.4 で 1 章 の 参 考 文 献 に つ い て 述 べ る 。. 16.
(19) OLIVE 香川大学学術情報リポジトリ. 図 1-8.2005 年 レ ク サ ス GS の 電 動 ア ク テ ィ ブ ス タ ビ ラ イ ザ サ ス ペ ン シ ョ ン シ ス テ ム 構 成 図. 波動歯車タイプの減速ギヤ ブラシレスモーター. スタビライザバー LH スタビライザバー RH. 図 1-9. レ ク サ ス GS 用 の 電 動 ア ク チ ェ ー タ 断 面 写 真. 17.
(20) OLIVE 香川大学学術情報リポジトリ. Motor Motor Rotation Rotation sensor sensor. Motor Motor Rotation Rotation sensor sensor. Motor Motor Driver Driver ECU ECU. Sprung Sprung mass mass GGsensor sensor Unsprung Unsprung mass mass GGsensor sensor Height Height sensor sensor. Motor Motor Driver Driver ECU ECU. Analog. Analog. Sprung Sprung mass mass GGsensor sensor Unsprung Unsprung mass mass GGsensor sensor Height Height sensor sensor. L/CAN Main MainBAT BAT 12V 12V DC/DC DC/DC 12V 12V. Suspension Suspensioncontrol control ECU ECU. Sub-BAT Sub-BAT 12V 12V Sprung Sprung mass mass GGsensor sensor Unsprung Unsprung mass mass GGsensor sensor Height Height sensor sensor. L/CAN Analog. Analog. Motor Motor Driver Driver ECU ECU. Sprung Sprung mass mass GGsensor sensor Unsprung Unsprung mass mass GGsensor sensor Height Height sensor sensor. Motor Motor Driver Driver ECU ECU. Motor Motor Rotation Rotation sensor sensor. Motor Motor Rotation Rotation sensor sensor. 図 1-10. 2007 年 研 究 発 表 の 電 動 ア ク テ ィ ブ サ ス ペ ン シ ョ ン シ ス テ ム 構 成 図. 18.
(21) OLIVE 香川大学学術情報リポジトリ. ★:この印は本文内で説明. 1980年代 1990年代 4 6 8 2 4 6 8 センチュリ ソアラ マジェスタ セルシオ スカイフック ★ クラウン セルシオ マジェスタ ★ レパート セドリック セドリック セドリック センチュリ ギャラン Σ ギャラン ディアマンテ ★ レオーネ マツダMPV ギャラン 2. 日 エ 本 ア. B.C.Hカー 米. サ. ス 国. ★. ルミナAPV セビル スカイフック連続 フリートウッド エキスペディション エルドラト コンチネンタル MarK8 サバーバン、タホ コンチネンタル ウインドスター インペリアル レバノン ニューヨークサルーン ダッジダイナスティ. コンチネンタル Mark7. …エアサス後2輪 …エアサス4輪 …ハイドロシステム …ハイドロアクティブ …セルフポンプ. ルノーサフラン 欧 州 ★. ハ 日 本 イ 米 国 ド 欧 ロ 州. 2000年代 2 マジェスタ H∞ セルシオ H∞ 9段 ’06LS. エスパス BMW 5 アウディA6 アウディ All Road アストラワゴン BENZ V オメガワゴン オペルシントラBENZ SBMW7 レンジローバ エスパス ディスカバリ. セリカ ★. インフィニティ. ソアラ シーマ. ランクル100 *フォレスタ グラシア * ギャラン * レガシー *. ★ 05チェロキー. Miniva *. 560SEL シトローエンBX VOLVO 7 *. 300E BMW850i BENZ600SEL M5 XM エグザンティア ランチャテーマ VOLVO 900 *. ★. BENZ CL ABC 750iL BenzS BMW7 ARC ベクトラ * BMW5 ★ ランチャ *. 電 動. ★. 図 1-11. 世 界 の 制 御 サ ス ペ ン シ ョ ン の 展 開 状 況. 19. ’05GS ’07LS.
(22) OLIVE 香川大学学術情報リポジトリ 1.2. 研究目的. 自動車のサスペンション仕様を硬くするとハンドル操作に対する応答性が向上し、また 制動時や操舵時の車両姿勢は安定する。一方、路面が荒れていると路面入力による振動が 車体に伝わり易く、乗員の乗り心地性能は損なわれる。このように、乗り心地と操縦性・ 安定性は相反した性能であり、従来のばねとアブソーバで構成するコンベンショナルのサ スペンションでは両立する性能に限界がある。一方、この両性能を向上する手段として、 走行条件、運転動作条件や車両状態量に応じて、サスペンション仕様を可変に制御するセ ミアクティブシステムとアクティブシステムがある。そのシステムの最適設計は重要であ り、その為、目標性能と人間特性との関連適合性が重要である。 よって、以上の背景をもとに、本研究には次の2つの目的を与えた。 1) 乗 り 心 地 性 能 と 操 縦 性 ・ 安 定 性 性 能 の 両 立 が 図 れ る 、 ア ク テ ィ ブ サ ス ペ ン シ ョ ン シ ス テムを対象に、課題である消費エネルギの低減を含めた新しい設計手法を提案し、そ の有効性を確認することで、自動車の振動乗り心地問題を考慮したシステム設計に応 用できる設計法であることを示すとともに、実際の車載制御機器システムとしての要 素設計技術を開発する。 そのステップは以下である。 ①市場の使用頻度を考慮した目標性能を設定する。 ②目標性能からアクチェータ要求仕様の導出式とアクチェータ仕様を決定する。 ③アクチェータの応答性を補償する制御ロジックを研究開発する。 ④実車及びベンチにて有効性を検証する。. 2) 車 両 性 能 及 び ア ク チ ェ ー タ の 要 求 性 能 を 決 め る に あ た り 、 重 要 な 旋 回 時 の 姿 勢 安 定 性 に 関 連 し て 、 旋 回 ロ ー ル 時 の 官 能 評 価 か ら 決 め た ロ ー ル 目 標 値 を ド ラ イ バ の 人 間 -機 械 フィードバック系の操作環境である、旋回時の人間行動特性の実験的研究から考察し、 その制御目標設計に関する妥当性を確認するとともに、以上のような制御機器設計に お い て 人 間 -自 動 車 系 か ら の 車 載 機 器 設 計 の 方 針 を 明 確 化 す る 。. 1.3. 論文の構成. 本学位論文は以下の7つの章から構成されている。 第 1 章は緒言 第 2 章は車両振動乗り心地における課題 第 3 章はサスペンションの力学モデルに関する基礎理論 第 4 章はサスペンションシステムの車両適用に関する研究 第 5 章は電動アクティブサスペンションの研究と開発 20.
(23) OLIVE 香川大学学術情報リポジトリ 第 6 章はロールの大きさによるドライバ挙動及び特性の研究 第 7 章は結言. それぞれの章について説明する。 第 1 章「緒言」は日米欧の技術開発推移からの制御サスペンションの歴史と研究目的お よび論文の構成を示す。 第 2 章「車両振動乗り心地における課題」では、車両振動の分類と人間の上下方向の感 度特性および慣性入力時のロール方向の感度特性について、過去の知見と最近の研究報告 内容を整理し、振動制御の目標値を明確にする。 第 3 章「サスペンションの力学モデルに関する基礎理論」では、サスペンションの振動 抑制モデルをパッシブサスペンションとアクティブサスペンションのモデル化を行い、そ れぞれのシミュレーション性能予測を実施し、振動制御による達成レベルを明確にする。 また、車両の横方向モーメントのつりあいから、ロール制御に必要な反ロールモーメント を明確にする。 第 4 章「サスペンションシステムの車両適用に関する研究」では、現在までに製品化し たセミアクティブサスペンションの代表例であるエアサスと油空圧アクティブサスペンシ ョンのシステム性能を明確にし、車両適用を可能とした要素技術について述べ、さらに車 両としての性能評価についてまとめ、次のシステムへの性能仕様を提案する。 第 5 章「電動アクティブサスペンションの研究と開発」では、課題とする消費エネルギ を低減する2つのシステムを車両に適用した研究結果をまとめる。一つのシステムは「電 動アクティブスタビライザサスペンションシステム」であり、もう一つは「電動アクティ ブサスペンションシステム」である。この二つのシステムについて、目標性能の提示から システム設計の設計手法を提案し、その有効性を検証し確認する。 第 6 章「ロールの大きさによるドライバ挙動及び特性の研究」では、旋回時のロールフ ィ ー リ ン グ の 要 因 を ド ラ イ バ の 頭 部 挙 動 に 着 目 し 、実 車 評 価 と ベ ン チ 実 験 に よ り 検 討 す る 。 すなわち、ロールの動きを再現し、視覚刺激および動揺刺激を選択的に組み合わせ検証が で き る ロ ー リ ン グ シ ミ ュ レ ー タ HDRS に よ り 、 実 車 の 動 き と HDRS の 動 き の 違 い か ら 人 間 に 付与される動揺刺激と視覚刺激を分別解析し、旋回時の横加速度含めたそれぞれの影響度 を明確する。 第 7 章「 結 言 」で は 、本 研 究 の ま と め を 行 う と と も に 、今 後 の 研 究 課 題 に つ い て 述 べ る 。. 21.
(24) OLIVE 香川大学学術情報リポジトリ 1.4. 参考文献. (1)発 行 人 戸 原 春 彦 ,自 動 車 用 空 気 ば ね の 歴 史 , 自 動 車 部 品 工 業 会 発 行 昭 和 43 年 3 月 1 発 行 (2)V.D.Polhemus, L.J.Kehoe, Jr., F.H.Cowin, S.L.Milliken, Cadillac's Air Suspension for the Eldorado Brougham, SAE Transactions, Vol.66, 1958 (3)F.McFarland, G.Peckham, E.Dietrich, The Buick Air Poise Suspension, SAE Paper 9A, 1958 (4)K.H.Hansen, J.F.Bertsch, R.E.Denzer, 1958 Chevrolet Level Air Suspension, SAE Paper 9D, 1958 (5)R.W.Perkins, Oldsmobile New-Matic Ride, SAE Transactions Vol.66,1958,pp.491-495 (6)Von Ing.H.Weller, Die Daimler-Benz-Luftfederung im Typ 300SE, ATZ Vol.65,No.2, Feb 1963,pp.34-42 (7)国 枝 正 春 ,空 気 ば ね 車 両 の 上 下 振 動 の 理 論 と 実 験 , 鉄 道 技 術 研 究 所 報 告 No.6, Apr.1958 (8)守 屋 茂 ,沼 澤 明 男 ,塩 見 正 直 ,木 津 龍 平 ,ト ヨ タ セ ン チ ュ リ ー (VG20)の シ ャ ー シ ,. ト ヨ タ 技 術 , Vol.19, No.4,1967, pp.461-470 (9)M.MIZUGUCHI,S.CHIKAMORI,T.SUDA,K.KOBAYASHI, Electronic Controlled Suspension (ECS), SAE,(1984), No.845051, pp.2.209-2.217 (10)伊 藤 正 美 ,松 重 誠 一 ,武 馬 修 一 ,大 沼 敏 男 ,鈴 木 高 夫 , ソ ア ラ 用 ト ヨ タ 電 子 制 御 エ ア サ ス ペ ン シ ョ ン の 開 発 , ト ヨ タ 技 術 Vol.36,No.1,1986 年 12 月 ,pp.10-20 (11)M.Hirose, S.Matsushige, S.Buma, k.kamiya, Toyota Electronic Modulated Air Suspension System for the 1986 SOARER, IEEE Transactions on lndustrial Electronics Vol.35, No.2, May,1988 (12) 横 矢 雄 二 , 浅 見 謙 , 浜 島 利 充 , ソ ア ラ 用 ト ヨ タ 電 子 制 御 サ ス ペ ン シ ョ ン (TEMS) の 開 発 ,. ト ヨ タ 技 術 Vol.34,No1,1984 年 6 月 (13) 横 矢 雄 二 , 浅 見 謙 , 宮 田 博 司 , 電 子 制 御 サ ス ペ ン シ ョ ン シ ス テ ム の 紹 介 , 自 動 車 技 術 Vol.39,No.2,1985 年 pp.199-203 (14)Y.Yokoya, K.Asami, T.Hamajima, N.Nakashima, Toyota Electronic Modulated Suspension (TEMS) System for the 1983 Soarer, SAE Paper 840341,February 1984 (15)D.C.Karnopp, Vibration Control Using a Semi-Active Force Generator, Trans. ASME, Ser. B 96(1974), pp.619-626. (16)D.Hennecke, B.Jordan, U.Ochner, Elektronische Dampfer Control-eine vollautomatisch adaptive Dampfkraftverstellung fur den BMW 635 Csi, ATZ 89 9, 1987, pp.471-479 (17)F.W.Lohr, Opel Omega-Teil 2:Fahrwerk und Antrieb ATZ 89 2, 1987, pp.63-72 (18)Lancia Thema 8.32 Autocar July, 27, 1988, pp.44-52 (19)H.Gaus, H.H.Julicher, Der neue Mercedes-Benz Roadstar-Gesamtfahrzeug und Fahrleistngen, ATZ 91 3, 1989, pp.113-121 22.
(25) OLIVE 香川大学学術情報リポジトリ (20)R.J.Renter, Speed Dependent Damping for the 1989 Cadillac Allante, SAE Paper 890178, February, 1989 (21)Von Jean Marie, Beitrag zum Studium und zur Ver-zolkommnung der Aufhangmg der Fahrzeuge ( Die Servo-Aufhangng FL) , ATZ Jahr-gang 57, Nr.3, Marz 1955, pp63-70. (22)菊 地 英 一 (訳 ), サ ー ボ 懸 架 装 置 に つ い て , 自 動 車 技 術 Vol.9, No.8, 1955 (23)A.G.Thompson, Design of active suspensions, Proc.Instn.Mech.Engrs.1970-71, Vol.185 36/71, pp-553-563 (24)A.G.Thompson, An Active Suspension with Optimal Linear State Feedback, Vehicle System Dynamics, 5, 1975 (25)P.G.Wright, D.A .Williams, The application of active suspension to high performance road vehicles, IMechE, C239/1984, pp.23-28 (26)D.C.Karnopp, Active Damping in Road Vehicle Suspension System, Vehicle System Dynamics 12,pp.291 -312 (1983) (27)A.T.Pham, Traitement Numerique des Couplages Entre Degres de Liberte dune Suspension Active, Ing. Automob., 108-110, Octobre (1987) (28)W.F.Milliken Jr., Active Suspension SAE 880799(1988), pp.1-6 (29)P.Hillebrecht, D.Konik, D.Peril, H.Wallentowitz, F.Zieglmeier, The active suspension between customer benefit and technological competition, Technical Papers:Total Vehicle Dynamics Vol. 2, XXIV FISITA Congress, Mechanical Engineering Publications Limited for the Institution of Mechanical Engineers, 1992, pp.221-230 (30)J.Dominy, D.N.Bulman, An Active Suspension for a Formula One Grand Prix Racing Car, Trans. of ASME, J. of Dynamic Systems, Measurement and Control, 107, 73-78 (1985) (31)武 馬 修 一 ,佐 藤 宏 毅 ,米 川 隆 ,大 沼 敏 男 ,服 部 勝 彦 ,杉 原 正 己 ,ア ク テ ィ ブ コ ン ト ロ ー ル サ ス ペ ン シ ョ ン の 解 析 と 開 発 , 日 本 機 械 学 会 論 文 集 (C 編 ) ,Vol.57,No.534,pp.257-263 ( 1991) (32)米 川 隆 ,大 沼 敏 男 ,森 淑 伯 ,後 藤 武 志 ,武 馬 修 一 ,ア ク テ ィ ブ コ ン ト ロ ー ル サ ス ペ ン シ ョ ン の 車 両 運 動 性 能 , 自 動 車 技 術 会 論 文 集 ,Vol.22, No.3, July 1991, pp63-69 (33)武 馬 修 一 ,近 藤 浩 ,佐 藤 国 仁 ,油 谷 敏 男 ,ト ヨ タ ア ク テ ィ ブ コ ン ト ロ ー ル サ ス ペ ン シ ョ ン の 開 発 ,ト ヨ タ 技 術. 193, Vol.40, No.1,pp.78-94. (34)福 島 直 人 ,赤 津 洋 介 ,藤 村 至 ,佐 藤 正 晴 ,福 山 研 輔 : ア ク テ ィ ブ サ ス ペ ン シ ョ ン の 安 定 性 ・ 接 地 性 の 向 上 , 自 動 車 技 術 , Vol.44, No.3,1990, pp.29-35 (35)Y.Akatsu et al, An Active Suspension Employing An Electrohydraulic Pressure Control System, 13 FISITA Congress, Torino, 905123(1990), pp.949-959 (36)川 上 広 司 ,浦 馬 場 真 吾 ,井 上 秀 雄 ,一 丸 英 則 , ソ ア ラ ア ク テ ィ ブ コ ン ト ロ ー ル 23.
(26) OLIVE 香川大学学術情報リポジトリ サ ス ペ ン シ ョ ン の 開 発 , TOYOTA Technical Review ( 1991) ,Vol.41, No.1, pp.75-87 (37)H.Kawakami, M.Tabata, H.Sato, H.Inoue, H.Itimaru, Development of Integrated System Between Active Control Suspension Active 4WS, TRC and ABS, SAE 920271 (1992) (38)Dieter Konik, Development of the Dynamic Drive for the new 7 Series of the BMW Group, International Journal of Vehicle Design( 2002) , Vol. 28, No.1/2/3, pp.131-149 (39)武 馬 修 一 ,浦 馬 場 真 吾 ,鈴 木 聡 ,大 熊 靖 大 ,趙 在 成 , 吹 野 崇 志 ,電 動 ア ク テ ィ ブ ス タ ビ ラ イ ザ サ ス ペ ン シ ョ ン シ ス テ ム , 自 動 車 技 術 (2006/7), Vol.60, pp.32(40)浦 馬 場 真 吾 ,杉 本 尚 康 ,武 馬 修 一 ,鈴 木 聡 ,西 原 彰 男 ,種 子 田 彰 哉 , 電 動 ア ク テ ィ ブ ス タ ビ ラ イ ザ サ ス ペ ン シ ョ ン シ ス テ ム の 開 発 , 自 動 車 技 術 会 論 文 集 , Vol.38,No.2,March2007, pp.195-200 (41)趙 在 成 ,武 馬 修 一 ,浦 馬 場 真 吾 ,大 熊 靖 大 ,浜 田 敏 敬 ,小 林 優 , 電 動 ア ク テ ィ ブ ス タ ビ ラ イ ザ サ ス ペ ン シ ョ ン シ ス テ ム の CAE に よ る 解 析 と 開 発 , 自 動 車 技 術 会 春 季 学 術. 講 演 会 , 前 刷 集 No.11-6, 2006549, 2006 年 5 月 , pp.5-9 (42)種 子 田 彰 哉 ,鈴 木 勝 巳 ,吹 野 崇 志 ,武 馬 修 一 ,浦 馬 場 真 吾 ,電 動 ア ク テ ィ ブ ス タ ビ ラ イ ザ ア ク チ ェ ー タ の 開 発 , 自 動 車 技 術 会 春 季 学 術 講 演 会 , 前 刷 集 No.11-6,20065210,2006 年 5 月 , pp.11-15 (43)Satoshi Suzuki, Shuuichi Buma, Shingo Urababa and Akio Nishihara, Akiya Taneda, Development of Electric Active Stabilizer Suspension System, SAE International(2006/4), 2006-01-1537 (44)Yuuki Ohta, Hiroaki Kato, Daisuke Yamada, Katsuhiko Sato, Takashi Fukino, Eitaku Nobuyama, Shuuichi Buma Development of an Electric Active Stabilizer System Based on Robust Design, SAE International(2006/4), 2006-01-0758 (45)大 熊 靖 大 ,武 馬 修 一 ,浦 馬 場 真 吾 ,鈴 木 聡 ,西 原 彰 男 ,趙 在 成 ,飯 田 友 幸 ,土 田 久 輔 , レ ク サ ス GS 電 動 ア ク テ ィ ブ ス タ ビ ラ イ ザ サ ス ペ ン シ ョ ン シ ス テ ム の 開 発 ,TOYOTA Technical Review, Vol.54 No.2, 2006/3 221, pp.90-97 (46)Yasuhiro Ohkuma,Shuuichi Buma,Shingo Urababa,Satoshi Suzuki,Akio Nishihara,Cho Jae Sung,Tomoyuki. Iida,Kyusuke. Tsuchida,Development. of. an. Electric. Active. Stabilizer. Suspension System for Lexus GS,TOYOTA Technical Review Vol.54 No.2, 2006/6 221, pp.88-95 (47)大 熊 靖 大 ,杉 本 尚 康 ,武 馬 修 一 ,浦 馬 場 真 吾 ,鈴 木 聡 ,種 子 田 彰 哉 ,神 田 亮 , 電 動 ア ク テ ィ ブ ス タ ビ ラ イ ザ サ ス ペ ン シ ョ ン シ ス テ ム ,日 本 機 械 学 会 年 次 大 会 , 7 号 (2006), pp.107-108 (48)鈴 木 勝 巳 ,種 子 田 彰 哉 ,吹 野 崇 志 ,武 馬 修 一 ,小 林 優 , 電 動 ア ク テ ィ ブ ス タ ビ ラ イ ザ ア ク チ ュ エ ー タ の 開 発 , 日 本 機 械 学 会 年 次 大 会 , 7 号 (2006), pp.109-110 24.
(27) OLIVE 香川大学学術情報リポジトリ (49)Daisuke Yamada,Yuuki Ohta,Hiroaki Kato,Daisuke Yamada,Katsuhiko Sato,Takashi Fukino, Eitaku Nobuyama, Shuuichi Buma, Development of an Electric Active Stabilizer System Based on Robust Design, FIJITA 2006 World Automotive Congress (2006/10), F2006V184 (50)武 馬 修 一 ,大 熊 靖 大 ,種 子 田 彰 哉 ,鈴 木 勝 巳 ,趙 在 成 ,小 林 優 , 電 動 ア ク テ ィ ブ ス タ ビ ラ イ ザ サ ス ペ ン シ ョ ン シ ス テ ム の 解 析 と 開 発 , 日 本 機 械 学 会 論 文 集 C 編 ,2008 年 12 月 号 ,第 74 巻 ,748 号 , pp.2827-2836 (51)Jae-Sung Cho, Shuuichi Buma, Shun’ichi Doi, The application of CAE tools in the development of an Active Stabilizer Suspension System, ICCAS 2007, 4406886, pp.91-95 (52)武 馬 修 一 ,趙 在 成 ,神 田 亮 ,梶 野 英 紀 ,土 田 久 輔 ,十 津 憲 司 , 大 谷 佳 史 , 電 動 ア ク テ ィ ブ サ ス ペ ン シ ョ ン ア ク チ ェ ー タ の 開 発 , 自 動 車 技 術 会 論 文 集 2008.9, Vol.39, No.5, pp.13–18 (53)武 馬 修 一 ,梶 野 英 紀 ,趙 在 成 ,杉 山 和 徹 ,神 田 亮 ,土 居 俊 一 ,電 動 ア ク テ ィ ブ サ ス ペ ン シ ョ ン シ ス テ ム の 構 築 と 性 能 評 価 ,日 本 機 械 学 会 交 通 物 流 学 術 講 演 論 文 集, 2007,pp.163-166 (54)神 田 亮 ,武 馬 修 一 ,趙 在 成 ,杉 山 和 徹 ,吉 岡 謙 志 朗 , 電 動 ア ク テ ィ ブ サ ス ペ ン シ ョ ン に よ る 乗 り 心 地 制 御 , 日 本 機 械 学 会 交 通 物 流 学 術 講 演 論 文 集 , 2007, pp.167-170 (55)武 馬 修 一 ,梶 野 英 紀 ,趙 在 成 ,高 橋 経 範 ,土 居 俊 一 ,旋 回 ロ ー ル 時 の ド ラ イ バ 挙 動 の 解 析 と 考 察 , 自 動 車 技 術 会 春 季 学 術 講 演 会 前 刷 集 ,No.2-8,2008 年 5 月 , pp.7-12 (56)Shuuichi Buma, Hidenori Kajino, Jae-Sung Cho, Tsunenori Takahashi, Shun’ichi Doi, Analysis and Consideration of the Driver Motion according to the Rolling by Slalom Running, JSAE Review (2009.1), Vol.30, No.1, pp.69-76 (57)武 馬 修 一 ,梶 野 英 紀 ,趙 在 成 ,高 橋 経 範 ,土 居 俊 一 , 旋 回 ロ ー ル 時 の ド ラ イ バ 挙 動 の 解 析 と 考 察 , 自 動 車 技 術 会 論 文 集 , Vol.40, No.2, March, 2009, pp. (58)Shuuichi Buma, Hidenori Kajino, Tsunenori Takahashi, Sun’ichi Doi, Consideration of a human dynamic characteristic and performance evaluation of an Electric Active Suspension, AIM (IEEE/ASME),2008 July.4 (59)Hidenori Kajino, Shuuichi Buma , Jae-Sung Cho, Ryo Kanda, The Future Development and Analysis of an Electric Active Suspension System, SAE (2008/4)2008-01-0345 (60)Hidenori Kajino, Shuuichi Buma, Jae-Sung Cho, Ryo Kanda, ELECTRIC ACTIVE SUSPENSION SYSTEM DEVELOPMENT WITH DRIVER’S MOTION ANALYSIS, FISITA (2008/9) F2008-03-012 (61)高 橋 経 範 ,土 居 俊 一 , 武 馬 修 一 , 車 両 の 操 舵 に 伴 う ロ ー ル 発 生 時 の ド ラ イ バ 姿 勢 に 関 す る 検 討 , 日 本 機 械 学 会 講 演 論 文 集 , No.085-1(08/03), 1312, pp.493-494. 25.
(28) OLIVE 香川大学学術情報リポジトリ (62)高 橋 経 範 ,土 居 俊 一 ,武 馬 修 一 , ス ラ ロ ー ム 走 行 時 の ド ラ イ バ の 操 作 行 動 解 析 ,. 日 本 機 械 学 会 第 17 回 交 通 ・物 流 部 門 大 会. 講 演 論 文 集 ,No.08-68(2008.12), pp.293-296. (63)須 田 義 大 ,末 松 啓 吾 ,中 野 公 彦 ,椎 葉 太 一 ,小 峰 久 直 , 自 動 車 に お け る 電 磁 サ ス ペ ン シ ョ ン の 研 究 , 日 本 機 械 学 会 交 通 ・物 流 部 門 大 会 , TRANSLOG ’ 99, pp.193-196 (64)末 松 啓 吾 ,須 田 義 大 ,中 野 公 彦 ,椎 葉 太 一 , 自 動 車 に お け る 電 磁 サ ス ペ ン シ ョ ン の 研 究 ,. 自 動 車 技 術 会 春 季 学 術 講 演 会 前 刷 集 4-00(2000), pp.193-196 (65)川 元 康 裕 ,須 田 義 大 ,井 上 博 文 ,近 藤 卓 宏 ,自 動 車 用 電 磁 サ ス ペ ン シ ョ ン の ア ク テ ィ ブ 制 御 に 関 す る 研 究 , 日 本 機 械 学 会 交 通 ・ 物 流 部 門 大 会 , Vol.2004, No.13(20041130), pp.103-106. (66)中 野 公 彦 ,平 山 勝 彦 ,林 隆 三 ,須 田 義 大 ,川 元 康 裕 , 電 磁 サ ス ペ ン シ ョ ン を 搭 載 し た 大 型 車 の 走 行 性 能 解 析 , 日 本 機 械 学 会 交 通 ・物 流 部 門 大 会 , (TRANSLOG2007), pp.143-146. 26.
(29) OLIVE 香川大学学術情報リポジトリ 第 2章. 車両振動乗り心地における課題. この章では、車両振動の分類と人間の上下方向の感度特性と慣性入力時のロール方向の 感度特性について、過去の知見と最近の研究報告内容の考察を加え、振動評価の目標値を 明確にする。 2.1. 車両振動の分類. 車 両 の 運 動 は 走 行 軌 跡 を 示 す ヨ ー 方 向 の 運 動 と ば ね 上 の 車 体 の 動 き を 示 す 、バ ウ ン ス( 上 下 ) ,ピ ッ チ ( 前 後 傾 斜 ) ,ロ ー ル ( 左 右 傾 斜 ) と ワ ー プ ( 前 後 ロ ー ル 量 の 差 = 車 体 の ね じ れ ) の 4 つ の 量 で 表 す 。 図 2-1 に そ の 定 義 を 示 す 。 本研究にて、主に取り扱う車両の動きは、路面からの入力で車体が動かされる各輪のバ ウ ン ス 方 向 の 動 き と 、旋 回 時 等 の 慣 性 入 力 で 車 体 が 回 転 運 動 す る ロ ー ル 方 向 の 動 き で あ り 、 これらについて、過去の研究成果と最近の研究成果を整理し、目標指標とすべき性能を明 確にする。. ヨー(正). δ. ヒーブ(正) バウンス(正). z y. x. ピッチ(正). Ψ φ ロール(正). 路面外乱. 図 2-1. 車 両 振 動 の 方 向 に よ る 分 類. 2.2. 路面入力時の人体振動感度と乗り心地評価. 2.2.1 人 間 の 振 動 感 覚 特 性 乗 り 心 地 の 評 価 用 語 は 周 波 数 範 囲 で こ れ ら の 現 象 に つ い て 表 現 さ れ て い る 。例 え ば 、 そ の 分 類 は い く つ か の 周 波 数 帯 に 分 割 さ れ 、 フ ラ ッ ト ラ イ ド は 0.25-3Hz の 間 、 早 い ば ね 上 の 動 き は 2-4 Hz 、腹 部 に 敏 感 な 乗 り 心 地 感 覚 は 4-8Hz、ば ね 下 の ば た つ き の 感 覚 は 8-15Hz と表現されているように周波数でその評価表現と基準値を変えている。 27.
(30) OLIVE 香川大学学術情報リポジトリ そ の 周 波 数 に よ る 振 動 乗 り 心 地 の 指 標 は ISO 規 格 IS0-2631. (1). にあり、垂直方向と横方. 向 の 加 速 レ ベ ル は 図 2-2(a)と (b)に 示 さ れ て い る 。こ の 図 か ら 、人 間 の 感 度 は 上 下 方 向( バ ウ ン ス 方 向 )が 4-8Hz、横 方 向( Y 方 向 )は 1-2Hz の 間 が 高 い 事 を 示 す 。そ れ は 腹 部 と 身 体 の他部分の共振に関係があると言われている。. [m/s2]. Acceleration level(rms). Acceleration level(rms). [m/s2]. 1/3 octave band frequency [Hz]. 1/3 octave band frequency [Hz]. 図 2-2(a).ISO 乗 り 心 地 指 標( 垂 直 方 向 ). 図 2-2(b).ISO 乗 り 心 地 指 標( 横 方 向 ). 人間の振動感覚特性の研究は古くから多くの研究が発表されている。振動許容度の研究 は Janeway ( 2 ) ,Goldmann ( 3 ) ,Lee&Pradoko ( 4 ) ,Dieckmann ( 5 ) ,お よ び Tamara ( 6 ) が あ り 、 そ の 代 表. Acceleration level [G]. 的 な 特 性 と ISO2631(1-4Hour)の 結 果 を 人 体 の 振 動 許 容 限 界 特 性 図 2-3 に 示 す 。. Frequency [Hz] 図 2-3. 上 下 振 動 の 人 体 の 振 動 許 容 限 界 特 性 28.
(31) OLIVE 香川大学学術情報リポジトリ 2.2.2. 乗り心地評価特性及び目標値. 乗り心地評価の快い又は不快とはどのような振動をどの周波数で感じているのかという 研究は、連続的な上下方向のサイン振動を与えた時の振動感覚特性を周波数と加速度との 関 係 で 表 し 、 Meister( 1926 年 ) の 線 図 ( 7 ) で 示 さ れ て い る 。 自 動 車 の 大 部 分 に お い て 、 周 波 数 の 物 理 量 パ ラ メ ー タ は 加 速 度 の 領 域 と 言 わ れ 、 縦 軸 を 加 速 度 で 表 し て い る 。 Meister と Janeway の 限 界 曲 線 を あ わ せ た 特 性 文 献 ( 8 ) に 対 し 、 今 回 新 た に 追 加 し た ISO2631 の 目 安 値 を 図 2-4 に 示 す 。 ISO2631 の 目 安 値 の 位 置 付 け を 明 確 に す る 事 が で き た 。. ISO2631少し不快:0.63m/s2. [cm/s2]. Meister 受 振 動 の 感 覚 領 域 レ ベ ル 0: 振 動 感 な し 1: 振 動 を 感 じ る 2: 快 く 感 じ る 3: 快 感 か ら 不 快 感 へ 移 り 変 わ る 4: 不 快 を 感 じ る 5: 不 快 感. ISO2631不快でない: 0.315m/s2未満. [Hz] 図 2-4. Meister 振 動 感 覚 特 性 線 図 こ の 図 2-4 の 結 果 か ら 乗 り 心 地 の 目 標 と し て 、 Meister の 領 域 2 と Janeway の 限 界 曲 線 の 間 に あ る ISO2631 の 目 安 値 「 少 し 不 快 0.63 [m/s 2 ]」 を 仮 目 標 値 と し て 設 定 す る 。 但 し 、 ISO 2631-1:1997(E)の Annex C( 対 応 JIS 規 格 JIS B 7760-2:2004) に 快 適 性 の 目 安値は、適用される各場面(騒音、気温、読書、食事等)に左右される前提で、下記の値 が紹介されている点は仮目標値としても注意が必要である。 ・ 不 快 で な い : 0.315 [m/s 2 ]未 満 ・ 少し不快. : 0.315~ 0.63 [m/s 2 ]. ・ やや不快. : 0.5~ 1.0 [m/s 2 ]. ・ 不快. : 0.8~ 1.6 [m/s 2 ]. ・ か な り 不 快 : 1.25~ 2.5 [m/s 2 ] ・ 極 度 に 不 快 : 2 [m/s 2 ]遥 か 越 え る 以上の過去の知見から、 29.
(32) OLIVE 香川大学学術情報リポジトリ ・ 上下方向の乗り心地の評価は周波数と上下方向の加速度を評価量として整理する。 ・ 目 標 値 は ISO2631 の 目 安 値 「 少 し 不 快 0.63 [m/s 2 ]」 を 仮 の 目 標 性 能 と す る 。( 但 し 、 そ の 車 両 毎 ,シ ス テ ム 毎 ,場 面 毎 に 左 右 さ れ る 前 提 で 、 目 標 値 は 注 意 が 必 要 で あ る 。). 2.3. 慣性入力時の乗り心地性能. 慣性入力時の乗り心地とは、下記の 2 項目を路面入力時と分けて取り扱う。 ① 加 速・減 速 時 の 前 後 方 向 の 加 速 度 が 働 い た 時 の ピ ッ チ 方 向 の 姿 勢 変 化 に 対 す る 乗 り 心 地 。 ②ハンドル操作による横加速度が働いた時のロール方向の姿勢変化に対する乗り心地。 その中で、ホイルベースとトレッドの軸間距離の違いから、ロール方向の姿勢を制御す る場合は、ピッチ方向に比較して大きな力を必要とする。そして、その抑制力はサスペン ションのジオメトリを利用した効果力(アンチダイブジオメトリやアンチスクウアットジ オメトリ)がピッチ方向とは異なり期待できない。よって、ばねとダンパによりアンチロ ールモーメントを発生させる必要がある。その値は路面入力の乗り心地と相反する性能の 為に、ロール方向の目標値の設定が重要となる。 路面入力の乗り心地性能に依存しない、ロール目標値が評価できるのはアクティブサス ペ ン シ ョ ン 実 験 車 が で き る 事 で 初 め て 達 成 で き る の で 、 そ の 実 験 車 が で き た 1985 年 か ら 、 ロール姿勢をドライバがどのように感じているのかを、その量と感じ方について調べた。 学 会 発 表 は 1989 年 9 月 に 発 表 し た ト ヨ タ セ リ カ の 論 文. (9) (10). で あ り 、現 在 も 有 効 な そ の 目. 標指標について検証する。. 2.3.1 評 価 条 件 旋回時のロール制御の制御目標には正ロール,ゼロロール,逆ロールが考えられる為、 アクティブサスペンションのロールの制御ゲインを変化させ、ドライバのロールの感じ方 を調べた。 ・ 評価パネラ:一般ドライバ 3 名とベテランドライバ 5 名の総計 8 名にて調査した。 ・ 走 行 コ ー ス : 30m~ 60m の 旋 回 半 径 を 持 つ 周 回 コ ー ス に て 、 レ ー ン チ ェ ン ジ 及 び ス ラ ロ ーム走行が中心で評価をまとめた。. 2.3.2 評 価 結 果 と ロ ー ル 姿 勢 の 目 標 値 試乗結果は定常旋回時の評価ではなく、レーンチェンジ、スラローム走行を主体にした 結 果 で ま と め た 。 そ の 結 果 、 図 2-5 の よ う に ロ ー ル 率 0.6 [deg] at 5.0 [m/s 2 ]で は ド ラ イ バ は ロ ー ル を し て い な い と 感 じ て い る こ と が わ か っ た 。ま た ロ ー ル 姿 勢 の「 良 し・悪 し 」 を 判 断 す る 官 能 評 価 で は 、 図 2-6 に 示 す よ う に 、 ロ ー ル を 零 と 感 じ て い る 所 が 、 最 も 良 い フィーリングを得ていることがわかった。 30.
(33) OLIVE 香川大学学術情報リポジトリ. [deg/0.5g]. 図2-5. ロール率とロール感の関係. ロール率[deg/0.5g] 図 2-6. ロ ー ル 率 と 官 能 評 価 の 関 係. 図 2-6 の 官 能 評 価 の 結 果 か ら 制 御 目 標 値 を 決 定 し た 。 ① 1989 年 の 油 空 圧 式 ア ク テ ィ ブ サ ス ペ ン シ ョ ン 車 の 目 標 : ロ ー ル 、 ピ ッ チ と も 姿 勢 制 御 目 標 値 を 0.5 [deg]/ 0.5G に 設 定 し た 。 ② 2005 年 の 電 動 ア ク テ ィ ブ ス タ ビ ラ イ ザ サ ス ペ ン シ ョ ン 車 両 の 目 標 : ロ ー ル を ゼ ロ と 感 じ て い る 領 域 の 範 囲 内 の ロ ー ル 角 1 [deg]と し た 。 31.
(34) OLIVE 香川大学学術情報リポジトリ 2.4. 最近の振動評価. 最近の高精度なドライビングシュミレータの発達により、人体に働く加速度の動揺と被 験者が目で感じる視覚についての研究が行われるようになってきた。 2.4.1 人 の 視 覚 ・ 動 揺 感 受 特 性 車 体 の 振 動 モ ー ド( ロ ー ル ,ピ ッ チ ,ヨ ー 及 び 上 下 ,左 右 )毎 に 、視 覚 と 動 揺 の 感 受 特 性 に 基 づ く ロ ー ル 感 の 向 上 の 論 文 (11)(12)が 発 表 さ れ 、 視 覚 の 重 要 性 が 明 確 に な っ た 。 そ の 結 果 を 図 2-7 に 示 す 。縦 軸 は 1 Hz 時 の 振 動 加 速 度 に 換 算 し て 比 較 を 行 っ て お り 、次 元 の 異 な る 二 つ の 特 性 が 比 較 で き て い る 。こ の 論 文 の 動 揺 の 閾 値 は Griffin ハ ン ド ブ ッ ク ( 1 3 ) か ら 引 用 し て い る 。 ま た 、 ロ ー ル 特 性 と 車 両 運 動 に 関 す る 論 文 (14)-(16)も 多 く 、 益 々 ド ラ イ バ の 官 能 評価との関連付けが重要となっている。. 図 2-7. 人 の 視 覚 ・ 動 揺 感 受 特 性. こ の 図 2-7( 小 さ い 値 が 感 度 の 高 い ) の 内 容 を 以 下 に 示 す 。 ・ ロール方向の認識と弁別は動揺及び視覚と同じくらいの感度。 ・ 回転運動の中ではロール方向の動揺の感度が高い。 ・ ヨーの視覚の感度はロールの視覚の感度より高い。 ロール方向の官能評価は動揺と視覚からの解析が必要であり、視覚は速度の次元で運動 の認識と弁別をしている事からロール速度の解析が必要である。 2.4.2 旋 回 時 の ド ラ イ バ 挙 動 特 性 へ の 解 析 提 案 前 述 2.3 節 の 図 2-5 と 図 2-6 の ロ ー ル 率 と 官 能 評 価 の 結 果 は ド ラ イ バ が 何 を 感 じ て 、こ 32.
(35) OLIVE 香川大学学術情報リポジトリ の 結 果 に な っ た の か は 未 解 明 で あ る の で 、ド ラ イ バ の 人 間 -機 械 フ ィ ー ド バ ッ ク 系 の 操 作 環 境である、旋回時のドライバ挙動特性の実験的研究から考察し、その制御目標値の妥当性 を確認する。 特に、視覚・動揺感受特性の結果を旋回時のロール官能評価に当てはめると、次の事が 言える。 ① 旋回時のロール官能評価は動揺と視覚からの解析が必要である。 ② 視覚はドライバの頭部挙動の影響を受ける事から、ロール時のドライバ頭部挙動の解 析が必要である。 よって、この上記 2 項目を含めたドライバ挙動の解析を後述、第 6 章にて実施する。. 2.5. 新たな制御目標値の提案. 第 6 章での検証結果を受けて、制御目標値として提案する内容を以下に述べる。 車 両 の ロ ー ル 角 (θ v )と ド ラ イ バ 頭 部 の ロ ー ル 補 正 角 (θ hv )に つ い て 、定 常 旋 回 の 場 合 は 予 めコースの曲率変化等から横加速度を予測して、頭部を旋回中心側に傾けるという Zikovitz ら の ヘ ッ ド チ ル ト の 研 究 ( 1 7 ) に も 有 る よ う に 、予 測 横 加 速 度 と の 相 関 関 係 を 見 出 す 事 (R=0.927)が で き る が 、ス ラ ロ ー ム 旋 回 の よ う に 過 渡 的 な 旋 回 条 件 の 横 加 速 度 (GL)と 頭 部 ロ ー ル 補 正 角 (θ hv )の 相 関 関 係 は 図 2-8 に 示 す よ う に 相 関 係 数 R=0.536 と な り 、 中 く ら いの強さの相関関係を示す。 こ の よ う な 過 渡 的 な 旋 回 条 件 の 場 合 は 後 述 す る 第 6 章 の 結 果( ’ 08 年 5 月 の 自 動 車 技 術 会 で 発 表 ( 1 8 ) ~ ( 2 0 ) )の よ う に 、頭 部 ロ ー ル 補 正 角 速 度 (⊿ θ hv )は 横 加 速 度 の ジ ャ ー ク 値 (⊿ GL)( 図 6-17)と 車 両 の ロ ー ル 角 速 度 (⊿ θ v )( 図 6-10)に 強 い 相 関 関 係 が あ る 事 を 明 確 に. Head roll angle(θhv)[deg]. した。. 20. Without roll control 15. R=0.536. 10 5. With roll control 0 0. 2. 4. 6. 8 2. Lateral acceleration (GL) [m/s ] 図 2-8. 横 加 速 度 と 頭 部 の ロ ー ル 補 正 角. 33. 10.
(36) OLIVE 香川大学学術情報リポジトリ そ の 2 条 件 の 内 、可 制 御 の 対 象 は 車 両 の ロ ー ル 角 速 度 (⊿ θ v)で あ る の で 、車 両 の ロ ー ル 角 速 度 (⊿ θ v)と 頭 部 の ロ ー ル 補 正 角 速 度 (⊿ θ hv )の 関 係 を ロ ー ル 制 御 あ り( 目 標 ロ ー ル 角 1[deg])と ロ ー ル 制 御 な し( 目 標 ロ ー ル 角 4[deg])の 全 デ ー タ か ら 相 関 係 数 を 求 め た 。そ の 関 係 を 図 2-9 で 示 す 。 直 線 補 完 式 の 相 関 係 数 R=0.812 に 比 べ 、 多 項 補 完 式 の 相 関 係 数 R=0.849 と よ り 強 い 相 関 を 示 す 事 が 分 っ た 。ま た 、ロ ー ル 制 御 有 り の み の 相 関 係 数 R=0.602 に 比 べ て も 、極 め て 強 い 相 関 関 係 と な る 事 が 分 っ た 。こ の 補 完 式 は 車 両 の ロ ー ル 角 速 度 (⊿ θ v)が 10[deg/s]以 下 の 領 域 と そ れ 以 上 の ロ ー ル が 大 き い 制 御 な し の 領 域 で 変 曲 点 が 存 在 す る 。 こ の 変 曲 点 を 使 っ て 、 目 標 と す る 車 両 の ロ ー ル 角 速 度 (⊿ θ v)の 基 準 を 検 討 し た 。. Head roll angle velosity (⊿θhv) [deg/s]. 70 60. y = 0.0725x2 - 0.1261x + 19.256 R = 0.849. With roll control. 50 40 30 20. Without roll control. 10 0. 変曲点:8[deg/s]. 0. 5. 10 15 20 Vehicle roll angle velosity( ⊿θv )[deg/s]. 25. 30. 図 2-9. 車 両 ロ ー ル 角 速 度 と ド ラ イ バ 頭 部 の ロ ー ル 補 正 角 速 度 の 相 関 関 係. 図 2-9 に て 、車 両 の ロ ー ル 角 速 度 (⊿ θ v)が 10[deg/s]以 下 の 領 域 は 頭 部 ロ ー ル 補 正 角 速 度 (⊿ θ hv)の 平 均 値 が 20[deg/s]と ほ ぼ 一 定 と な っ て い る 。こ の 領 域 の 値 を も う 一 つ の 強 い 相 関 関 係 で あ る 横 加 速 度 の ジ ャ ー ク 値 (⊿ GL)と 頭 部 ロ ー ル 補 正 角 速 度 (⊿ θ hv)と の 関 係. H e a d r o ll a b so lu te a n g le v e lo c ity ( ⊿ θh g ) [ d e g /s]. について解析する。 40 y = 0.1479x + 11.809 R2 = 0.0188. 30 20 10 0 0. 5. 10 15 20 25 Differentiate of Lateral acceleration (⊿GL)[m/s3 ]. 30. 35. 図 2-10. 横 加 速 度 の ジ ャ ー ク と 絶 対 座 標 で の 頭 部 ロ ー ル 角 速 度 の 関 係. 34.
(37) OLIVE 香川大学学術情報リポジトリ 図 2-10 結 果 か ら 横 加 速 度 の ジ ャ ー ク 値 (⊿ GL)と 絶 対 座 標 の 頭 部 ロ ー ル 角 速 度 (⊿ θ hg) の 関 係 は 平 均 が 14[deg/s]あ る 事 が わ か る 。 そ し て 、 図 2-11 に 示 す 、 横 加 速 度 の ジ ャ ー ク 値 (⊿ GL)と 車 両 の ロ ー ル 角 速 度 (⊿ θ v)の 関 係 か ら 、 目 標 ロ ー ル 角 1 [deg]の ロ ー ル 制 御 あ り の 場 合 、 横 加 速 度 の ジ ャ ー ク 値 (⊿ GL) に 対 す る 平 均 的 な 車 両 の ロ ー ル 角 速 度 (⊿ θ v)は 5[deg/s]で あ る 。 以 上 の 結 果 か ら ト ー タ ル の 頭 部 ロ ー ル 補 正 角 速 度 (⊿ θ hv)は 19[deg/s] と な り 、 図 2-9 に 示 す 、 頭 部 ロ ー ル 補 正 角 速 度 (⊿ θ hv)の 一 定 値 20[deg/s]に 近 づ く 。 こ の 結 果 か ら 、 ロ ー ル 制 御 あ り ( 目 標 ロ ー ル 角 1 [deg]) の ロ ー ル 角 が ゼ ロ に 近 い 場 合 は 横 加 速 度 の ジ ャ ー ク ( ⊿ GL) に 対 し て も 、 頭 部 の ロ ー ル 補 正 角 速 度 (⊿ θ hv)は 決 ま る こ と が 分 る 。. こ の 結 果 か ら 、 車 両 の ロ ー ル 角 速 度 (⊿ θ v)で 決 ま る 頭 部 ロ ー ル 補 正 角 速 度 (⊿ θ hv)は ロ ー ル 制 御 あ り ( 目 標 ロ ー ル 角 1 [deg]) の 場 合 の 最 小 の 平 均 値 ( 20[deg/s]) か ら ロ ー ル が 大 き く な る 事 で 、車 両 の ロ ー ル 角 速 度 (⊿ θ v)に 対 し 、頭 部 ロ ー ル 補 正 角 速 度 が 非 線 形 に 大きくなる。 よ っ て 、車 両 の ロ ー ル 角 速 度 (⊿ θ v)の 影 響 で 頭 部 ロ ー ル 補 正 角 速 度 (⊿ θ hv)が 非 線 形 に 急 変 す る 変 曲 点 以 下 に 車 両 の ロ ー ル 角 速 度 (⊿ θ v)を 制 御 す る 事 が 必 要 と な る 。. Differentiate of Lateral acceleration(⊿GL) [m/s 3]. 図 2-9 の グ ラ フ か ら 求 め た 車 両 の ロ ー ル 角 速 度 の 変 曲 点 は 8[deg/s]で あ る 。. 35 30 25 20 15 10 5 0. y = 2.4122x + 6.536 R2 = 0.8657. Without roll control y = 1.1443x + 0.6948 R2 = 0.9654. With roll control 0. 5. 10. 15. 20. 25. 30. Vehicle roll angle velosity(⊿θv) [deg/s]. 図 2-11. 横 加 速 度 の ジ ャ ー ク と 車 両 の ロ ー ル 角 速 度 の 関 係. こ の 変 曲 点 で あ る 車 両 の ロ ー ル 角 速 度 (⊿ θ v)が 8[deg/s]以 下 は 頭 部 ロ ー ル 補 正 角 速 度 (⊿ θ hv)の 変 化 が 少 な い 事 を 意 味 す る 。 よ っ て 、 こ の 値 以 下 を 車 両 ロ ー ル 角 速 度 の 目 標 と 設定し、システムの検証を行う。. 35.
図
+7

![図 2-10 結 果 か ら 横 加 速 度 の ジ ャ ー ク 値 (⊿ GL)と 絶 対 座 標 の 頭 部 ロ ー ル 角 速 度 (⊿ θ hg) の 関 係 は 平 均 が 14[deg/s]あ る 事 が わ か る 。 そ し て 、 図 2-11 に 示 す 、 横 加 速 度 の ジ ャ ー ク 値 (⊿ GL)と 車 両 の ロ ー ル 角 速 度 (⊿ θ v)の 関 係 か ら 、 目 標 ロ ー ル 角 1 [deg]の ロ ー ル 制 御 あ り の 場 合 、 横 加 速 度](https://thumb-ap.123doks.com/thumbv2/123deta/5736825.1020518/37.892.166.717.682.870/果から横加速度ジャーク値θθ.webp)
関連したドキュメント
Although the picture element (pixel) in conventional image sensors are placed in the form of a lattice for ease of implementation, the lattice place- ment of pixels intrinsically
医学部附属病院は1月10日,医療事故防止に 関する研修会の一環として,東京電力株式会社
東京大学 大学院情報理工学系研究科 数理情報学専攻. [email protected]
As far as local conditions at infinity are concerned, it is shown that at energy zero the Dirac equation without mass term has no non-trivial L 2 -solutions at infinity for
Since the hyperbolic potential 2.3 and its special cases are useful models for interatomic and intermolecular forces, this paper motivates further studies in order to find
第4 回モニ タリン グ技 術等の 船 舶建造工 程へ の適用 に関す る調査 研究 委員 会開催( レー ザ溶接 技術の 船舶建 造工 程への 適
With hysteresis not enabled (see ALS_CONFIG register), the ALS_TH registers set the upper and lower interrupt thresholds of the ambient light detection window. Interrupt
A WRITE Operation Where DATA from the Master is Written in SPI Register with Address 2 Followed by a READ Back Operation to Confirm a Correct WRITE Operation. Registers are updated
