理学 療 法 学 第
32
巻 第7号406
〜
415頁 (2005年 )報
告
短
下
肢
装
具
の
背
屈 制 動
機 能
が
片麻 痺者
の
歩行
に
与
え
る
影 響
*櫻
井
愛
子
1)#山 本 澄 子
2)田 澤 英
二 3>要 旨
短
下 肢 装 具の背
屈 制 動機
能 が,
脳 卒 中 片 麻 痺 者の歩 行 時 に.
ド腿 お よ び 足 関 節 に 及 ぼ す 影 響 を 明 ら か に す るため,
6
名
の片 麻 痺 者
で装
具の背 屈 制 動
の有 無
,背 屈 制 動
モー
メ ン トの大 き
さに よ る歩 行
の比較 を行
っ た。6
名 中
4
名
の被 験 者
で は,
背 屈 制 動 を付 加 す
る と 立脚 中 期
か ら後 期
に足 関 節 背 屈 角 度 変 化 量
の減 少
が見
ら れ,
2
名
の被 験 者
で は差
が見
られな
か っ た。ま
た,
全
て の被験 者
において,
足 関 節 底 屈
モー
メ ン トに は 差 が見
られ な かっ た。
以 上の結 果
か ら,
装 具
に背 屈 制 動 機 能
を付 加 す
ると,
下腿
の前 方
回転
が妨 げ
ら れ るこ とにより
,
b乞脚 中 期
か ら後 期
におこる足 部
を軸
と し た身 体
の前 方 回 転
が制 限
さ れ る と考
え ら れ た。
足関 節 底 屈
モー
メ ン トに差 が見
られ な かっ たこと は,
装 具
の背 屈 制 動 機 能
には,
蹴 り
だ し を増
大す
る機 能
は ない こ と を 示 唆 してい る。
キ
ー
ワー
ド脳 卒 中 片 麻 痺
,
短 下 肢 装 具
,
背 屈 制 動
モー
メ ン ト は じ め に片 麻
痺
者の短 下 肢 装 具(
AFO
;Ankle
Foot
Orthosis
)
で は
,
プラス テ ィック 製靴
べ ら式
装具 (
SHB
;Shoehorn
Brace
)
が 最 も多
く処方
さ れ てい る。
SHB
が多
く製 作
さ れている背 景
に は,
軽 量
であ るこ と,
屋内
・
屋外
で の兼
用 が 可能
で あ るこ と な ど,利 便 性
の 良 さが あげ
ら れ る 1>。
し か し近年
で は,
小 型・
軽
量 で制 動 機 構
がつ い た プラ ス テ ィッ ク 製 継手付
AFO
が多 数
開 発 さ れてい る た め2)3),
利 便 性
の 良 さ に 加 え て, 必 要 な機
能 を 選 択 す るこ とがで き る。
そのた め, 医療 従 事 者
は, 片 麻痺 者
の運動 機 能
に あ わ せ,
必要
な装
具の機 能
につ い て選択 す
る必 要
があ
る。
AFO
の矢
状 面にお ける機 能
は,装
具 が発 揮 す
る制 動
モー
メン トの向 き
,制 動
モー
メ ン トの大 き
さ,
足 関節 初
期 角 度
の3
点
で決 ま
る。
こ こで は,
制動 を 「
運 動
の向 き
と逆
向
きの力
が加
わるこ とによ り, 運動
が徐
々に減 速
し てい く状態 」
と定 義
す る。
臨 床
で 用い られ てい る装
具 で *Effects of the Dorsifiexional Brak正ng Function of AFOs on the Gaits Qf Hemiplegic Patients
l) 昭 和 大 学 保 健 医 療 学 部 理 学 療 法 学 科
(〒226
−
8555 神 奈 川県 横 浜 市 緑 区f
・
目 市場 町 1865)Aiko Sukurai
,
RPT :Faculty of Nursing and Rehabititation Science,
Showa University
2}国 際 医 療 福 祉 大 学 大 学 院
Sumiko Yamamoto
,
Eng.
PhD;Graduatc Schoo1、
InternatienalUniversity of Heatth and Welfare 3)田沢製作所
Eiji Tazawa
,
CPO
,
PhD:TazawaMfg
.
Co
.
#E
.
mail :sakurai @nr.
showa・
u、
ac.
jp
(受 付日 2005年2月18日/ 受 理 日 2DO5年9月9日) は
,
SHB
な
どの プラス テ ィック製
AFO
がこの定 義
に当
て は ま る。ダ ブルクレ ンザ ック継 手
で可 動 範 囲
を設 定
し,
一
定
のロ∫動範
囲で は逆 向
きの力
が加
わ らず (
遊動 )
,
可動 範 囲
を 超 え る と動
き が 止 ま る場
合 に は 当 て は ま ら な い。
制 動
モー
メン トの向 き
は, 足 関節底
屈 運動
に対
し背
屈方 向
へ の モー
メ ン トを発 揮 す
る底 屈 制 動
モー
メ ン ト,
足関 節 背 屈
運動
に対
し底
屈方 向
へ のモー
メ ン トを 発 揮 す る背 屈
制動
モー
メン トと定
義
さ れ ている2)。
制 動モー
メ ン トの大 き
さ は,
プラス テ ィ ックの厚
さ や トリ ミング4),
油 圧・
バ ネ など制 動機構
の種
類 により 決 まる。
足 関節 初
期 角 度
は, 装 具 が底
屈 お よ び背 屈 制 動
モー
メ ン トを発 揮
し始
め る角 度
であ
る。
装
具の底 屈 制 動 機 能
が歩 行
に及ぼす 影響
は,
山本
ら に より解析
さ れ ている。山 本 ら
は,
片麻 痺 者
の装 具
に適 切
な 底 屈 制 動
モー
メ ントを付 加 す
る ことに より
,
踵 接 地
か ら全 足 底 接 地 ま
で の期 間
に,
足 関 節背 屈 筋 群
の遠 心 性 収
縮 を補 助
し,
そ れ に伴 う滑 ら
かな
下腿
の前 方
回転 を
生じ
させ る こと ができ
る とし
てい る 5−
7〕。
こ こ で示 す ド腿
の前 方
回転
と は,
立脚
期の固 定
さ れ た 足部
の一
ヒで足 関 節 が背 屈
していく状 態
を指 す
。一
方
,
背凪
制動
モー
メ ン トが歩 行
に 及 ぼ す役
割
につ い て は,
異 な る見 解
があ
る。Thilman
は,
下 腿三頭 筋の筋 緊 張 亢 進 な どで背 屈 制 動モー
メン トが 増加 す
る ことに より
,
立脚 中期
か ら後 期
の下 腿の前方
同転
が制
限 さ れ る た め,
装 具
には背 屈 制 動 機 構
を付 加
し ない ほう
が良
い と示 唆
してい るs)。Lehmann
に よ る と,
片 麻 痺 者
は 立脚 中
期
か ら後
期
に,
下 腿 及 び身
体
を前 方
回転
さ せ る こ と に 対 し て 恐怖 感
が あ る た め,
背
与
影響
屈 制 動 機 構
を付 加 す
る こ と に より恐 怖 感
が減少 し
,
膝 折
れの防 止・
身体
の前方
回転 増
大が 可能
に な る の で は ない か と仮 説
を 立て てい る9)10 )。
臨 床
ヒで は,
背 屈 制 動 機
能
がつ い たSHB
が多
く 処 方
さ れて い る こ と か ら,
Lehmann
の 意 見 を 支 持 してい る医 療 者 が 多い と 推 測 さ れ る。
ま たLehmann
の意 見
を発 展 さ
せ,
立脚 後 期
の「
蹴 り だ し」
の増
大 を 目的
に,背 屈 制 動 機 能
がつ い たSHB
を 使 用 する こ とも ある。
しか し,
Thilman
の示 唆す
る よう
に,
装 具
が 立脚 中 期 か
ら後期
の下 腿
の前 方 回転
を制
限 し てい る と した ら, 足 関節 背 屈 角
度減
少 に より骨
盤
・
体 幹
が前方
へ 十 分 移動
で き な く な り,
「蹴 り だ し 」 に必 要 な姿 勢
が 保て な く な ると推 測 さ れ る。
つ ま り,
背
屈 制 動 機 能
を有 す
るSHB
な
どの装 具 を 装 着 す
る こ と に より
,
立脚 後 期
の「
蹴 り
だし」 が 阻害 され
る という仮 説
が成 り
立つ 。そ
こ で本研 究
で は,
脳 卒 中 片麻 痺 者 を対 象 と
し,
装
具 の背 屈 制 動 機 能
が,
vk脚 中期
か ら後 期
の ド腿の前 方
回転
と,
蹴 り
だ しの大 き
さを変化
させ るか否
かを記 述 す
ること を
目的 とす
る。ま
た脳 卒 中 片麻 痺 者
が,背
屈制 動 機 能
を付 加
した
SHB
を使
用す
ること
の妥 当性
につ い て検
討 す る。
対 象 お よ び 方 法1
.
対象
1
) 対象
者
の基
本 情報
対 象
は,
裸
足 での杖 歩 行
が 可能
な 脳卒
中片麻 痺 者
6
名
と し た (表
1
)。
平 均
年
齢
64.
0
±11
.
2
歳,
発 症 か らの期
間は平均
29.
8
±39,
0
ヶ月 で あっ た。三
次
元動 作 解 析
システ ムの搆 成
上,
カメ ラか らマー
カ が隠
れて しま う
可能性
があ
る た め,
歩 行 時
に介 助
が 必 要な者
,
近位
での見守 り
が必 要 な者
は除外
し た。
ま
た高 次
神経 機 能 障 害
が重 度
で,
口頭指
示に対 す る 理 解 が 困 難 な者
,
失調
症 状 を呈す
る者
,
表 在
・
深 部 感 覚
が脱 失
してい る者
,
整
形外 科
疾患
や 歩 行 に 障 害 を 及 ぼ す 合 併 症 を 持つ者
は除外
し た。
な お
,
対 象者
に は,
実 験 開始 前
に研 究
に対 す
る説 明
を 口頭 と 文 書で行い, 研 究 参 加 に 対 す る 同 意 を得
た。
2
) 対 象 者
の運 動 機 能
運
動
麻痺
の 程 度 を 示 すた め に,
F
肢のBrunnstrom
recovery stage(
以 ド,
B.
R.
S,
)
,
背
臥位
での 足 関 節 底 屈自動 運 動
の可 否
,
卜腿
三頭 筋 腱 反 射
,
及 び 他 動
での足 関節 最
大背 屈 角 度
を 測定
し た。
足 関 節 最 大 背 屈 角 度の計 測 には
,
ゴニオ
メー
タを使 用 した
。また
下腿
三頭 筋
の弾性
の程 度 を 示 す
た め,
お お
よそ
1
秒 間
に1
度
の割 合
で ゆっ くり と 足 関 節 を背屈 さ せ た時の 角 度と,
背 屈さ せ た時に足 部 が 発 揮 す
る底 屈 方 向
へ のモー
メ ントを 自
作
の下 腿 ;頭 筋 弾 性 計 測 機 (
図
1
−
A
参照 ) を使 用 し定 量 的
に計 測
し た。
下 腿三頭 筋弾
性計
測機
は,
赤 澤
ら が作 製
し た端
座 位 で計 測 す
る 足関 節 特 性 計 測 機
を参 考
に しIP,
長 座 位
お よ び臥 位
で計
測 で き る もの を 作 製 し た。
な お, ド腿 三 頭筋 弾 性 を臨 床
上の 測定 結
果 と 照 ら し 合 わ せ る た め,
ゴニ オメー
タ で計
測
した値
と下 腿
三頭 筋 弾性 計 測 機
のポテ ン ショ メー
タで計
測 し た値
を一
致
させ,Modified
Ashworth
Scale
を 用い て定
性 的に評 価 し た。
対
象 者
の 運動 機 能 測
定
結 果
を表
2
に示 す
。下 肢
B
.
RS
.
は3 〜
5
,背
臥位
での足関 節 底 屈 自動 運 動
は,
運 動 可 能
なも
のが5
名
,
不
可 能 な ものが1
名
であっ た、
下 腿
三頭
筋
腱反 射
は 全員
が非 麻 痺 側
と比 較 し亢 進 し
,
他動 的 な足
関節 最
大背 屈 角 度
は,
底 背 屈
0
度
か ら背 屈
10
度
の範 囲
であ
っ た。
下腿
F
頭
筋
弾
性
の測
定
結 果
を,
図
1
−
B
に示 す
。 グラ フ に示
した値
は,
連 続 的
に計 測
し た角 度
の中
か ら,
底 屈
20
度
か ら5
度 毎
の値 (
底 屈
20
度
か ら底 背 屈
0
度
の範
囲 ) を 選 択 し,
その時のモー
メン トを プロ ッ トした も のであ
る。 グラ フ の横 軸
は足 関 節 底 屈 角 度
,
縦 軸
は底 屈
方向
へ の モー
メ ン トで あ る。
症 例4
・
症 例6
の2
名
にお いて,
足 関節 底
屈5
度 か ら 底 背屈
0
度にか けて,
足関節
モー
メン トの急
激 な増 加
が 見 ら れ た。
2
.
方 法1
) 実 験 用装 具
SHB
な どの プラ ス テ ィッ ク製
AFO
で は,
制 動
モー
メ ン トの大 き
さ がプラ ス テ ィッ ク の厚
さ,
ト リミングラ イ ンの形 状
により決 定 さ
れる。 プ ラスティッ クで装 具 を作
製 し た場
合には,
微 妙
な厚
さの違
い や トリ ミングの違
い に よ り,
発 生 す る 制 動モー
メ ン トの大 き さ を統 制 す
る こ表
1 対象
者の疾 患 情 報 発 症 か らの 性 別 年 齢 疾 患 名 期間使
用 麻 痺側 使用装具 歩 行 補 助 具 症 例1
症 例2
症 例3
症 例4 症 例5
症 例6
女 性50
歳男性
56
歳 男 性67
歳 男性 59歳 男性 72歳 女性80
歳0
.
9
ケ月1
.
5
ケ月
2.
0ヶ月 63ヶ月 19ケ月93
ケ月 左 視 床 出 血右被殻
出血 左 視床出 血 脳 出 血 左視 床 出血 脳 梗 塞 右 片 麻 痺左
片 麻 痺 右 片 麻 痺 右 片 麻 痺 右 片 麻 痺 右 片 麻痺 な しSHB
な し SHBSHBSHBT
−
caneT−
caneT−
caneT−
caneT−
caneQ・
cane408
理 学 療 法 学 第32
巻 第7
号 図 1・
A
下 腿 三 頭 筋 弾 性 計 測 機(
EZ)
⊥ λ XI 申e9
・
20←
底 屈.
15−
10 喝 足 関 節 角 度 (度 ) 図 1・
B
下 腿三頭筋 弾 性 計測結果 o 下 腿 三 頭 筋 弾 性 計 測 機 は,
検 者 が 弾 性 計 測 機の ハ ン ドルを 回 すこと に よ り,
足 関節 背屈方 向へ 回転 する仕 組みとなっ て い る.
ゆっ く り とハ ン ドルを 回 し た 時の 角度 と 反力を,
ボ テン ショ メー
タ (精 密可変 抵 抗 器 )と トル ク セ ン サ (クボタ社 製 トルク ドユー
サー
TDOO20
)
を 用い て 電 圧出 力し60
Hz
でA
/D
変換 後,
PC
に取 り込んだ.
PC に取 り込んだ電圧 値か ら角
度値
,
モー
メントを算 出し た.
表2 対 象 者の運 動 機 能 下肢 底 屈 アキレ ス腱 他動 Modified B.
R.
S
.
自 動 運 動 反 射 最 大 背 屈 角 度Ashworth
Scale
症 例1 症 例2 症例3 症 例4 症例5 症 例6 435333 可 能 可 能 可能 不可 能 町 能 可 能 進 進 進 進 進 進亠
几亠
儿L
几』
几淋
几亠
儿 度 度 度 度 度 度 0 5 0尸
D 匚 」0
玉− 十 十 121222 図2 実 験用装具の概 要
角 度調 節 機 構と して上部 角度 調 節板
,
下 部 角 度 調 節 板 を 付 加 し た.
上 部角 度調 節 板に は攴柱 部分 に沿っ て横 穴 を2箇 所 空 け て お り,
横 穴 に 沿っ てス ラ イ ド させるこ と により 板の角 度を調 節した,
とが
できな
いこ と,
複 数
の被 験 者
に適合
で き る プラステ ィッ ク製
AFO
を 作 ること が で き ない こ と か ら,
プ ラス テ ィック製
AFO
の機
能
に近
い実験 用 装 具 を作 製 した
。
実験 用 装 具
の概 要
を図
2
に示
す。
実 験 用 装 具は, 両 側支 柱 付
AFO
に,
足 関 節 初期 角 度
を変 え
ること
が でき
る機構
及 び 制 動モー
メ ン トの大 き
さを変 え
るこ とができ
る機 構
を 付 加 し た。
装 具の質
量は靴 部
を含
め て1
.
75kg
で あり
,
通常
のSHB
の4 〜5
倍
の重
さ であ
った
。実 験 用
装 具 を 個々 の対 象 者
に適合
させ るため,
カブの位 置
を 上 下 に変 え
ら れる機構 を付 加
し た。 ま た足 関節 中
心 と装具
の継 手 位 置 を
でき
る限 り近
づけ
るた め,
靴
の踵部
分 と下腿 部
にパ ッドを用
いて位 置 調 節
を し た。
装具
が制
動
モー
メ ン トを発 揮
し始
め る足関節
初 期角
度の調 節 は,
図2
に示 す
上部 角 度 調 節板
と下 部 角 度 調 節板
でおこなっ た。
足関 節 初 期 角 度
は,
背 屈
5
度
,
背 屈
3
度,
底 背 屈0
度の3
段
階で設 定 した。
装 具
が発 揮 す
る制 動
モー
メ ン トの 大 き さ は, バネ 定 数
5N
/mm,
ユO
N
/mm,
15
N
/mm,
20
N
〆mm の バネ を
,
装
具の左 右
両側
に取 り付 け
る ことによっ て変 化
さ せ た。
発揮 す
る張 力
が小
さいも
のから
,
バネ
1
(
Sl,5N
〆mm)
,
バ ネ2
(S2,
10
Nfrnm
)
,
バネ
3
(
S3
,
15
N
〆mm)
。 バ ネ4
(
S4,
20
N
〆lnm) と
した
。
装 具
の支 柱 よ り前
に取 り付
け たバ ネ は,
足 関 節底
屈 時 に 制 動モー
メ ン トを発 揮 す
る た め底 屈 制 動
バネ
,
支 柱
よりも後
に取 り付 け
たバネ
は,
装 具 背 屈 時
に制 動
モー
メ ント を発 揮 す
る た め背 屈 制 動
バ ネ と定 義
した。
実 験 用 装 具
が発揮
し た制 動
モー
メ ン トを図
3
−
A
,
山本
ら
7〕が 計 測 し
た プラ ス ティ ッ ク製 装 具
につ いて の結 果
を図
3
−
B
に示 す
。
グラ フ の横 軸 は 装 具の 底 背 屈角
度,
縦軸
は装 具
が発 揮
し た制 動
モー
メ ン トであ
る。図
3
−
A
を,
図
3−
B
に示 し
たSHB
とス パ イラ ル装 具
の モー
メ ン ト と比 較 す
る と,
S1
の発 揮 す
る モー
メ ン トはス パ イラル装具 と
同程 度
,S4
の発 揮 す
るモー
メ ント
は既 存
のSHB
の中
で最 も硬
いSHB
と同 程 度
であ
っ た。 ま た手
で装具
を 背 屈 させ比 較 し たと こ ろ,
S2
は柔ら か いSHB
と同程 度
,
S3
は 中等
度のSHB
と 同程 度
で あっ た。
2
) 実験 条件
歩 行 は 連 続 し た 動
作
のた め,
立 脚初 期
の異常 動作
が立
脚 中 期 や後期
の動 作
に影 響 を与 え
る 可能性
があ
る。そ
こ で,
立 脚 中 期 か ら後 期にか けての 状態 を
比較 す
る た め に は,
遊 脚 期,
立 脚 初 期 か ら 中期
までの 問 題を取
り除く
必 要 が あ る。
遊 脚期
, 立脚 初期
に は,
装
具の底 屈 制 動 機 能
が 働 き,
遊 脚期
のToe
clearanceを確 保
,
立 脚 初 期
の接
地パ ター
ンを 改 善,
足 部の滑 ら か な 接 地と下 腿の前 方
回転
を促 す
た め5−
7),
全
ての条件
に底
屈制 動 機 能 を付 加
し た。
装具
の初期 角 度
と底 屈
制動
バ ネの設 定
に は,
DACS
AFO
研 究
会
の足 関
節
初
期 角度
変 更
ルー
チンとバネ
の強
さ変 更
ルー
チ ンを参 考
にして,
被
験者
ごとに決 定
し た12 )。
足 関 節 初 期 角 度
の設 定
は,
裸 足 歩 行
の接 地
の状 態 を観 察
し,
踵接 地
の場 合
は底 背 屈
0
度
,
全 足底 接
地 とつ ま先 接
地
の場 合
は背 屈 位
と し た。背 屈
3
度
,
5
度
の選 択
で は,
実
験 用 装具
を 装着
して歩行
し た 歩容
を 比 較 し,
健 常 者の 歩 容に近 く なっ た もの を 選 択 し た。
底
1
出制 動
バ ネの設定
で は,S
ユか らS4
の バ ネ を 実 験 用 装 具 に 装 着 し た 状 態で歩 行
し,
踵接
地 か ら 全 足底
接 地 ま での時 間,
立 脚 初 期・
中期
・
後 期
の膝
関節
,
股 関節
の角 度
,
位 置
か ら,
健 常 者
の歩 容
に近く
なっ た もの を 選択
した。
同一
被 験者
の足 関節 初 期 角 度
と底 屈
制動
バ ネ は,.
条
件1
か ら4
で全
て 同 じ もの と し た。
実 験 用 装 具
に使 用
し たバ ネ は,Sl
か らS4
で各
2
本 ず
つ し か 用 意 し な かっ た た め, 底 屈 制 動バ ネ と し て 決定
し たバネは,
背 屈 制 動
バ ネ とし て使
用す
る こと はで き な か っ た。 よっ て,
残
っ た3
種 類
のバネ
で最 も
バネ定 数
が小
さ
いも
のを
,
背 屈 制 動
バネ
と して条件
1
で使 用
し,
2
番
目
に小
さいも
のを条 件
2
,
最 も大 き
いも
のを条 件
3
で使
用 し
た。設 定
した実 験 条件
は,
以下
の通 り
で ある。
● 条 件
1
底 屈 制 動
・
背 屈 制勤
バネ
の両方
を装 着 (
背 屈 制 動
バ ネ は最 も
バネ定 数
が小 さ
いも
の,
Sl
又
はS2
●条 件
2
底 屈 制 動
・
背 屈 制 動
バネ
の両 方 を装 着 (
背 屈 制 動
バネ
尋一
S1−
■一
一
S2−
→←−
S3+ S4”
参 考
文献
7
)
を改 変
図3・
A
実 験用 装具が 発揮す る 制動モー
メン ト 図3
・
B
プ ラスティッ ク製AFO
が発揮 する制 動モー
メ ン ト図
3
−
A
は,
本研究の実 験用装具 が発 揮 する制 動モー
メ ンL
図3
−
B はSHB
とスパ イラル装 具が発 揮 する制 動モー
メ ン トで あ る.
実験用装具 が発 揮 するモー
メン トは,
ロー
ドセ ルを 装 具の カブ に取 り付 け,
「装 具の 支柱 と直 角方 向へ 引い た 際の力 」と 「ロー
ドセ ルを引い た ワ イ ヤー
か ら足 継 手 中 心 まで の距 離 」 を掛 け 合わ せ て計 算した.
また,
装具の角 度と 制動モー
メ ン トの関係 を示 す ため,
ポテ ン シ ョメー
タ で作 製 した電 気 角 度 計 を取 り付 け,
同 時に足 継 手の回転 角 度 を計 測 し た.
ロー
ドセ ルとポテン ショ メー
タ に よ り計 測し た力と角 度デー
タ は,
増 幅 後サ ンプリ ン グ周 波 数10Hz でA,
,
’
D 変 換 し,
PC
に取 り込んだ.
410
理学 療 法 学 第32巻 第7
号 は2
番
目 にバ ネ定
数
が小
さいも
の,S2
又
はS3
)
● 条 件
3
底
屈 制 動・
背 屈 制 動バネの両 方 を装着 (
背 屈
制動
バ ネ は最 も
バネ定 数
が 大 きい もの,S3
又 はS4
)
● 条件
4
底 屈 制 動
バネ
のみ装 着
● 条件
5
裸 足 歩 行
3
)歩 行 計 測 方 法
歩 行 計 測
で は,
三次 元 動 作 解 析 装 置
VICON370
(
Vicon
Motion
Systems
社 製 ) と 縦
1800
mm,
横
600mm
の大 型 床 反 力 計
4
枚
(
共和
電業
製)
を 使 用 し た。
6
台
の カ メラ に よ り計
測 し た 位置
デー
タ は,床
反力
と同
期 さ
せ,
サンプ
リング周 波 数
60Hz
でA
/D
変 換
し,
PC
に取 り込
ん だ。
裸 足 歩 行 時
のマー
カ位 置
は,
両 肩 峰
,
両
股 関節 点 (
上前 腸 骨 棘
と大 転 子 中央 を結
んだ直 線 上
の大 転 子 側
か ら1
/3
の距離
の点 ),
両膝 関 節 点 (
膝 関節 裂 隙 直
上)
,
両 足関 節 点 (
外 果 中 央 )
,
両 第
5
中 足 骨 頭
の計
10
点
と した
。装 具 歩 行 時
,
麻 痺 側
の足 関 節 点
は,
装 具継 手 部 分
のた
め マー
カ貼 り付
け が 困難
であ る。
そのた め,
装 具 上 に 貼 り つけ
たマー
カか ら,
仮 想
の足
関節 点 を推 定
す ること と し,装 具 上
に3
点
の マー
カを貼 り
つ け た。
こ の た め装
具歩 行
時
のマー
カ位 置
は,
両 肩 峰
,
両 股 関節 点
,
両膝
関節
点,
両 第
5
中 足 骨 頭
,
非 麻 痺 側 足
関節 点
,
装
具3
点
の計
12
点
と した。
被 験 者には
,
装 具 を 装着
して歩 行 練 習
をした後
,
「
通
常 使
用 し ている杖
を用
い て,
い つも
のよう
に歩
いてく
だ さい」
と 指 示 を し た。
実 験条 件
の順序
は,
条 件
1
〜
5
を無作 為
に 順序
づ け し た。
歩行
回 数 は,
通常
状態
の歩 行
へ 移行
す る4
歩 目 以降
で,各
条 件
2
〜
3
歩 分
の デー
タ が得
ら れ る まで繰 り
返 し た。4
)
デー
タ処
理裸 足
歩 行
では,PC
に取 り
込 ん だデー
タ を,
臨 床 歩 行
分
析
研 究 会の処 理 ソ フトC3DtoDIFF,
DIFF
Gait
を用
い て
,
ロー
パ ス フ ィル タ(
Butterworth
filter
,
遮 断 周波 数
6Hz
) を掛
けノイズ除 去 し た後
,関 節 中
心点
へ の内挿
, 関節 角 度 計 算
,
関節
モー
メン ト計算
を 行っ た。
装具 歩 行
の場 合
は,
装 具 上
に貼 り付 け
たマー
カ3
点
か ら,
計 算
によ る足 関節 位 置
の推 定
を行
っ た後
,裸
足 歩 行 と 同様
に処
理 し た、
角 度
は,静 止
立位 時
の角 度
を ゼロと し て計 算 した
。
ま た
,被 験 者 間
・
被 験 者 内
の比 較 をす
るた
め に,歩 行
1
周
期 を100
% と し て 正規 化
し た。
結 果 を示 す
パ ラメー
タと し て,1
) 距 離 時
間 因 子2
)
足 関 節 角 度 変 化 量
3
) 足 関 節 底 屈
モー
メ ン ト ピー
ク値
を 用い た。
距 離 時 間 因子
は,
床
反力
と足 関 節
マー
カ より
計 算
し,
各 条 件
5〜
13
歩 分
の デー
タを
用いた。足
関節
角 度 変 化
量 は,
各 歩 行 周 期
において,
立脚 初 期
の最 大 底
屈 位 か ら立 脚 後 期
の最 大 背 屈 角 度 ま
で の角
度 変
化
量 と し た。足 関節 底
屈モー
メ ン トピー
ク値
は,
各
歩 行 周 期 に おけ
る足 関節 底 屈
モー
メ ン トか ら最 大 値
を算 出
し た。
足 関節 角 度 変 化 量
,
足 関 節 底 屈
モー
メ ン トピー
ク値
は,
各 条
件
2
〜
3
歩 分
の デー
タを 用い た。3
.
結果
1
)
距離
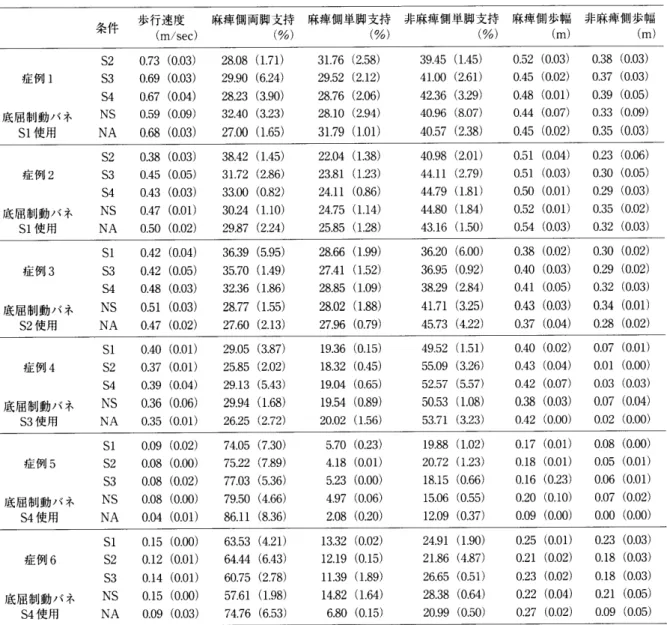
時 間 因 子表
3
に 歩 行 速 度,
麻 痺 側・
非 麻 痺 側 歩 幅,
麻痺
側 両 脚 支 持・
単
脚支 持 割 合
を示 す
。
表
に示
し た値
は,
各 条件
に お ける5
〜
13
歩分
の平 均 値
である。
歩 行
速度
は,
被 験
者
に よ る歩 行
速度
の差 が大
きく
,
症例
1
で は0
,
59
〜
0
,
73m
/sec(
最 小 値
〜
最 大 値 )
,
症 例
2
で は0,
38〜
O
.
50
m /sec,
症例
3
で は0
.
42
一
O
.
51
m /sec,
症例
4
で はO
.
35
一
O
.
40
mfsec と 速 度 が 速い の に対
し,
症例
5
で は0.
04
一
O.
09
m /sec , 症 例6
で は0
.
09
〜
0
.
15
m /sec と 速度
が 遅 かっ た。
バネの強 さ に よ る影
響
は 見 ら れ な かっ た。
歩 幅
は,
全
症 例 とも麻 痺 側 歩 幅 よ り も非 麻 痺 側 歩 幅 が小
さいと
いう結
果を
示 し た。
症
例5
, 症 例6
で は,非
麻痺 側 歩 幅
が0
,
3m
未 満
,
麻
痺
側歩 幅
も0
.
3m
未 満
と,
非
麻 痺 側・
麻痺
側の両方
が他
の症 例 と比較
して小
さ な値
を示
し ていた。
症例
4
では,
非 麻 痺 側 歩 幅
が0
〜
0
,
02m
と極 端
に小 さく
,
麻 痺
側 立脚 期
に非 麻 痺
側 をほとんど前
に 進 ませ るこ と がで き ない,
揃 え 型 ま た は 後ろ型 歩 行 という
結 果 を 示 し た。
症 例1
, 症 例2
,
症 例3
で は,
非 麻 痺
側 を
お お よ そ0.
3m
以上
,
麻 痺 側 を
O
.
4
m 以 上前
に進
ま せ る ことが でき
てい た。 また,
バネの強 さ によ る傾向
は,
症 例
1
・
症 例
2
・
症 例
3
で は見 ら
れな
かった
が,
症 例
4
・
症例
5
・
症 例
6
では,
背 屈 制 動
バネ が な
い(
NS
> ま
たは背 屈 制 動
バ ネの強
さ が弱
い(
Sl
)場 合
に,
非 麻 痺
側 歩 幅
が大 き くな
る傾 向 を示 し
た。歩 行 周 期
に おけ
る麻 痺 側 両 脚 支 持 割 合 と麻 痺 側 単脚 支
持 割 合
で は,
症 例5
,
症 例6
で両 脚 支 持 割 合 が 極端
に 大き く
,
症 例
5
が74
,
1
〜
86
,
1
%
,
症 例
6
が57
.
6
〜
748
%
と いう結 果
だっ た。ま
た症 例
5
,
症 例
6
では,
単 脚 支 持 割
合 が 小 さい 値 を 示 し た。
症 例1
,
症 例2
,
症 例3
,
症 例4
で は,
両 脚 支 持 時 間
が健 常 者
の値
であ
る20
% 程 度
と 比 較 し, 若干
大 き な値
を示
してい た。
ま た 全 症例
と も,
バネ
の大
き さ に よ る 傾向
は見
ら れ な かっ た。
2
)
足関節 角 度変 化
量図
4
に, 症 例3
及
び 症 例4
の歩 行
1
周 期
に おけ
る 足関
節角
度 を
示
す
。
足 関節
角
度
は,歩
行周
期 を
100
% に規
格
し た後
に,
各条 件
2
〜
3
歩 分
の波 形
を平 均
し た値
であ
る。 図5
に は,全
症 例の各 条 件
に お け る 足 関節 角 度
変 化 量 を示 す
。
足 関節 角 度 変 化 量
は時
間軸 を 規格 化
し た後
,
各 歩
行 周 期
に おける最 大 底 屈 時
の値
と最 大背 屈 時
の値
の差
を算 出
し,平 均 値 と標
準
偏 差 を 求
め た。ま
た各被 験 者
に おけ
る変 化 量
の差
を確 認 す
るた め,一・
元 配 置分 散 分 析
を実
表
3
距離 時 間 因子 結 果歩 行 速 度
麻
痺
側 両 脚支持
条 件 (rn/sec ) (%)麻痺
側 単 脚 支 持非 麻 痺 側 単 脚 支 持
麻 痺側歩幅
非麻痺側 歩 幅 〔%) (% ) 〔m ) (m ) 症 例 1 底屈 制 動バ ネ
Sl
使 用S2
0
.
73(
0
.
03
)28
、
08
(
1
.
71
)S3
0
.
69
(0
.
D3
) 29,
90
(6.
24) S40
.
67(0
.
04)28
.
23
(
3
.
90
) NS O.
59 (0.
09) 32AO (3.
23)NA
O
.
68
(0
.
03
)27
.
00
(1
.
65
)31
.
76
(2.
58) 29.
52 (2,
12)28
.
76
(2.
06
) 28.
10 (294)3
工.
79
(1.
Ol
) 39,
45 (L45) 41.
00 (2、
61) 42.
36
(3
.
29
) 40、
96 (8
.
07
) 40.
57 〔2
.
38
) 0.
52 〔0
.
03
)0
.
38
(0
.
03
) 〔}.
45 (0
.
02
)0
.
37
(0
,
03
) α48
(0
.
Ol
)0
.
39
(0
,
05
)0
,
44 (0.
07) 0.
33 〔0.
09)0
.
45
〔〔}.
02
).
35
〔0
,
03
) 症 例2 底 屈 制 動バ ネSl
使 用 S20
.
38(0
.
03)38
.
42(1
.
45)S3
0.
45 (0.
05
)31
.
72
〔286) S4 0.
43 (0.
03)33
,
00
(0
.
82
) NSO
,
47 (0.
Ol)30
,
24
(L10)NA
O
.
5〔)(0
.
02
)29
.
87
(224)22
ρ4
(1
.
38
) 23.
81 (1、
23)24
.
ll
(0
.
86
)24
、
75
(1
.
14
) 25.
85 (128) 1914007n68
冖
D 2211181906
91781
04443
4
△1444
0.
51 〔0.
04
)0
.
23
(0
.
06
) 〔}.
51 (O.
03)0
.
30
(0
.
05
) 0.
50 〔0.
Ol) 0、
29 〔0
.
03
)0
.
52 (0
.
Ol
〕0
.
35
(0
.
02
) 0.
54 〔OD3
)0
.
32
(0
、
03
) 症 例3
底
屈制動
バネS2
使用 Sl O.
42 (0.
04) 36、
39 (5.
95
)S3
0
,
42 (0.
05)35
.
70 〔1
.
49
) S4 0、
48 (.
03)32
.
36
〔1
.
86
)NS
O
.
51
(O
.
03
) 28.
77 (1.
55)NA
O
.
47
(0
.
02
) 27.
60 〔2.
13)28
.
66
(1
、
99
>27
.
41
(1
.
52
)28
,
85
(1.
09)28
.
02
(
1
.
88
)27
.
96
(0
.
79
)3620
(6.
00)36
.
95
(0
、
92
〕 3829 (2.
84)4L71
(3
.
25
)45
、
73
(4
.
22
) 0.
38〔0
.
02)0
.
30(0
.
02)O
.
40 (0.
03) 0.
29 (0
.
〔}2
> 0.
41 (0.
05) 0.
32 (〔LO3}0
.
43
(
0
.
03
}0
.
34(
0.
OPO
.
37
(0
.
04
) 〔},
28 (0
,
02
) 症 例4
底屈
制動
バネS3
使 用Sl
O
.
40
(0
.
01
) 29.
05 (3.
87)S2
0
,
37
(0
.
01) 25.
85 〔2.
02)S4
0
,
39
(0
.
04) 29.
13 〔5.
43)NS
O
.
36
(0.
06) 29.
94 (1
.
68
)NA
.
35
(O
,
Ol
) 26.
25 (2.
72) 19.
36 (0.
15) 18.
32 (0.
45) 19.
04 (0
.
65
)19
.
54
(G89
) 20.
2 (1.
56)49
.
52 (1
.
51
〕55
.
09
(3
、
26
)52
.
57
(5.
57)50
、
53
〔1
,
08
) 53.
71 〔3
.
23).
40
(0
.
02
) 0.
07 (0.
Ol)0
.
43 (0
.
04) 0、
01 (.
OQ> 0.
42 (0.
07) 0.
03 〔0.
03) 0.
38 (0.
〔}3) 0.
07 (0,
04) 0.
42 〔0.
00) 0.
02 (0,
00) 症 例5 底 屈 制 動バネS4
使用Sl
O
.
09
(0
.
02
)74
.
05
(7
.
30
)S2
0
.
08
(0
.
00
) 75.
22 〔7.
89)S3
0
.
08
(0
.
02
)77
.
03
(5.
36)NS
O
.
08
〔0
.
00
)7950
(4.
66)NA
O
.
04
(0
.
0
生) 86.
ll (836)5
.
70
(0
,
23) 4.
18 (0.
01) 523 (0.
00) 4.
97 〔OD6
) 2.
08 (0
.
20
) 19.
88 (1.
02) 20.
72 (1.
23
) 18.
15 (0
,
66
)15
、
(}6
〔〔L55
)12
.
09
(0
.
37
)0
.
17
(0
.
OD
O
.
08
(0
.
00
)0
.
18
(0
.
Ol
)0
.
05 (0.
Ol)0
.
16
(0
.
23
〕0
.
06
(0
.
Ol) 0.
20 〔0.
10) 〔}.
07 (0,
02)0
.
9
〔0
.
00
) 0.
00 (0、
00) 症 例6
底 屈 制 動バ ネS4
使 用 Sl O.
15 〔0.
00)63
.
53 (4
.
21
)S2
0
.
12
(0
.
1
)64
.
44 〔6.
43) S3 0、
14 (0.
Ol)60
.
75 (2
.
78
) NSOユ5
〔0
.
00)57
,
61
(
L98
)NA
O
.
09
(0
.
03
)74
.
76
(6
.
53
)13
.
32
(0
,
02
) 12,
19 (0.
15) lL39 (1.
89)14
.
82
〔1,
64
) 6.
8 (0.
15) 24.
91 (1.
90
)21
,
86
(4
.
87
) 26,
65 (0.
51)28
、
38
〔0
.
64
) 20.
99 〔0.
50) 〔}.
25
CO
、
Ol
)0
.
23
(0
.
03
冫021
(0
,
02
) 0.
18 (0.
03) 0.
23 (0.
02)0
.
18 〔0
.
03
)0
.
22
(O
.
04
) 〔}.
21
(0
,
05
)0
.
27
〔O
.
02
)0
.
09
(0
,
05
)S1
:背屈制 動バ ネ1を装 着し たAFO で の歩 行 時.
S2
:背 屈 制 動バ ネ2を装 着したAFO で の 歩 行 時,
S3 :背屈 制 動バネ3を装 着し た
AFO
で の歩 行 時,
S4 :背 屈制 動バ ネ4
を 装着し たAFO
での歩 行 時,
NS :背 屈 制 動バ ネ を使用 し ないAFO
での 歩行 時
,
NA
:裸 足 歩 行 時の距 離 時 間 因 子を示す.
( )内はSD
である.
施 し た。
条 件
問 に有 意 差 が 見
ら れ た 症例
1
(F
〔4,
lm≡
5
,
99
,
p
〈0.
Ol
)
,
症 例
2
(
F
(.
tlo)=
2
,
61
,
p〈0.
10
) , 症 例3
(Fc4.
ie)=
5
.
99
,
p
<0
.
Ol
)
,
症 例4
(Fc4
.
g)=
3
.
63
,
p
<O.
05
),
症 例
5
(
F
c4.
s) =7
.
01
,
p 〈O
.
Ol
) につ い て,
多 重
比 較 検 定 (
Tuke ゾ
sHSD
test>
を行
っ た。
検 定 結 果
よ り,
症 例
1
,
2
,
3
,
5
で は,
バ ネ な し より も
バネ あ り
の歩 行
で,
有 意
に足 関 節 角 度 変 化
量 が 小 さ く な り, 症 例4
のみ逆
の傾 向 を示 し
た。 症例
1
は,
バ ネ な し・
裸
足歩 行
よ り も,
バ ネ4
使
用時
に足 関節 変 化
量 が 有 意に小 さ かっ た (p 〈O.
Ol
)
。
症 例
2
は
,
バネ な し
よりも
バネ
3
使 用 時
に,
変 化 量
が有 意
に小 さ
かっ た (p
<0
,
05
>
。
症 例3
は, バ ネ な し よ り もバ ネ3
・
バ ネ4使 用 時に有 意
に変 化
量が小 さ く
,
バ ネ1使
用時
よ りも
バネ
3
使 用 時
に,
変化 量 が
小 さ かっ た (p 〈0
,
01
)
。
症 例
4
は,
症 例
1
〜
3
と は異 な
り,
裸 足 歩 行の 時 よ り もバ ネ4
使 用 時 に 足 関節 変 化 量
が 大 きい値
を 示 し た (p<0.
05
>
が,
バネ な
し とバネ あ り
の 問に は,
差
が見
られ な かっ た。
症 例5
は,
バ ネ な し・
裸 足 歩 行
よりも
バネ
1
・
2
・
3
使 用 時
に有
意 に 小 さい足関 節 角 度 変 化
を示
し た。
3
)
足関 節
底 屈モー
メ ン トピー
ク 値図
6
に,
症 例
3
,
症例
4
の歩
行1
周期
に お ける足 関節
底 背 屈
モー
メ ン トを 示 す。
足 関節 底 背
屈モー
メ ントは,
歩 行 周 期
を100
% と して時 間 規 格 化 し た 後 に,
各
条 件2
〜3
歩 分
の波 形 を平 均
し たも
の で あ る。
図7
に 示 す症
例 1から症 例
6
の足 関節 底 屈
モー
メ ン ト ピー
ク値
は,
同様
に各条
件
2
〜3
歩 分
の波 形
を,
そ れ ぞ れ時 間
軸 規格
化 し た後
,
ピー
ク値 を 求
め,
平 均 値
と標 準 偏
差 を算
出 し た。
ま た,
各
被験 者
に おい て,
条 件 問
の差 を検 定 す
るた
め,
・
元 配 置 分 散 分析
を行
っ た。
分
散
分
析
の結
果
で は,全
て の被験 者
に おいて,
条
件 に よ る差
は 認 め られ な かっ た。412 理 学療 法 学 第32巻 第7号 1 15 105
0 5
(
哩)
囲 紐 猩 誕 曜一
10 嚶一
15 ↓ 0% 症 例 3ヌ
P2FF
囁
F塁
F广
粍
穿
F
哲
一遣
階
炉
. ……
一
…内 .
.
一
.
.
20% 40% 60 % 80% 100% 歩行 周 期 (%)−
S1−一一
S3−
S4{ 肥一
M ↑15 囮 証10趣
5 嘔 o 齪.
5一
10 嚶.
1511 ・・ 症 傍 4塁
9 ず甲
嚇
留
夢岬
r
遣
P1窄
遣
遣
Fβ
串
… ….
一
.
罹…
…
一.
一
.
…
.
・
tt
S220 % 40% 60% 80% 100ye 歩 行周期1鮒 S3−
S4m−
←一
一
NS−−
bNA 図
4
歩 行 1周期 に おける足 関 節 角 度 代 表例と して症例3,
症 例4
の歩 行1
周期に お け る 足 関節 角 度を示 す.
Sl
:背 屈 制動バネ1を装 着し たAFO で の歩 行 時,
S2
:背 屈 制 動バ ネ2を 装着 したAFO
での歩 行 時,
S3
:背 屈 制 動バネ3
を 装着したAFO
で の歩 行 時,
S4
:背屈制 動バネ4
を 装着し たAFO
で の歩行 時,
NS
l背 屈 制 動バ ネを使用 し ないAFOでの歩 行 時
,
NA
;裸 足 歩 行 時の足 関 節 底 背屈角
度 変化である.
図 中Plは,
NS
の立 脚期に お け る 最 大 底 屈値,
P2はNS の立脚 期における最 大 背 屈 値である.
症 例4
の よ う に 立脚 期に最 大 背 屈のピー
ク が得ら れ ない 場 合は,
立 脚 期 に おける最 大値をP2 と した,
(度) 252015fe50 症 例1商
中
“
中
自
S2 S3 S4 NS NA (度 ) 2520 ↑5105D 症例4
S2 S3 S4 NS NA (度 ) 2520151050自
幽 症 例2 ホ
卩
+
吻
S2 S3 S4 NS NA (度 )症 例5 * * * 25201510 50 ■
■ * 琳
「
一
]
,
嗣 SI S2 S3 NS NA (度 ) 25 症 例3 20151050SI S3 S4 NS NA (度 ) 2520151050 症 例6 SI S2 S3 NS NA 図5
各条 件に お け る 足 関 節 角 度 変 化 量 症 例1〜
6
の足 関 節 角 度 変 化 量 を 示 す.
足関 節 角 度 変 化量 は,
図4で示した Pl (立 脚 期に お け る最大底 屈 値 )とP2
(立脚 期にお け る 最 大 背 屈 値 )の差で あ る.
図中 闘は平 均値.
1
は最大・
最 小値 を示 す.一
元 配 置分 散 分 析,
多 重比 較 (Tukey
’
sHSD
test)に おい て,
有 意 差が認め ら れ たもの は,
* * (p<0
.
Ol
),
* (p〈0.
05)で示 す.
考
察
今
回の研
究におい て,
症 例
1
,
症 例
2
,
症
例3
, 症 例5
の4
例の片 麻 痺 者
では,
装 具
に背 屈 制 動
バネ を付 加 す
る こと に よ り,
足 関 節角
度 変化
量 が小
さくな
っ た。足 関節
背
屈角
度 が 小 さ く なっ たの は,
歩 行 周 期の40
%か ら60
%
の時 期 (
立脚
中期
か ら後
期
) に かけ
てだっ たこ と か ら,
Thilmann
が提
唱 し た よ う に,
装 具の背 屈 制 動 機
能
が 立 脚 中 期 か ら後
期 に か けて の下 腿
の前 方 囘転 を妨 げ
ること
が 明 らかになっ た。
Lehman
が示 す
よう
に,
恐 怖
感
で故 意
に下 腿
の前 方 回転 を制 限
してい る な ら ば,
背
屈 制 動機
能 を付 加 す
るこ と に より
,
足 関 節 角 度 変 化 量
は大
き く
な る と 予 想 さ れるた め,
4
例の片 麻 痺
.
者
に お いてLehman
の仮
説は棄 却 さ れ る。
症 例
4,
症 例
6
で は,
バネ
の有 無
に よ り 足関 節 角 度
に変 化
が見
ら れ な かっ た。
症
例4
は,
足 関 節 底 屈の 自動 運短 ド肢 装 具