平成
27
年度
学士学位論文
VR
環境における視点の操作が自己身体
に及ぼす影響
Effects of the position of viewpoint on self body in
VR environment
1160298
加賀山 龍
指導教員
繁桝 博昭
2015
年
2
月
25
日
要 旨
VR
環境における視点の操作が自己身体に及ぼす影響
加賀山 龍
近年安価なヘッドマウントディスプレイ(HMD)が発売され, 多くの人がHMDを用いて バーチャルリアリティ(VR)を楽しむことができるようになった. VRを用いることで, 現実 では不可能な事象を体験することも可能である. その1つとして、カメラを用いることで自 身の視覚のみを身体から切り離すことができる. しかしHMDを装着した状態で通常とは異 なる視点で作業を行ったとき, 人間の動作にどのように影響を及ぼすかは明らかではない. そこで本研究では, VR 環境において, 身体と視点の不一致により自己身体に及ぼす効果を 検討した. 被験者は左側に提示したモデルとなるブロックと同じ配置になるように右側のブ ロックを再配置するブロックコピー課題を行い, このときの視点の効果を検討した. 実験の 結果, 受動的に視界が変化する条件では, 課題完了時間遅延と映像酔いが, 身体と視点に物理 的なずれがある条件では, 映像酔いと首を多く振ってしまう効果が見られた.このことから, VR環境における身体と視点の不一致により, 自己身体に影響を及ぼすことが示された. キーワード HMD VR ブロックコピー 映像酔いAbstract
Effects of the position of viewpoint on self body in VR
environment
Ryu KAGAYAMA
Recently inexpensive head-mounted display (HMD) have been developed and many people are able to enjoy a virtual reality (VR). By using VR technology, it is possible to experience event which never happen in the real world. For example, it is possible to isolate the observers’ own viewpoint from their own body using a camera and a HMD. However, when working with a different viewpoint from their own body wearing a HMD, it is unclear how this difference influences to the human performance and their bodies. In this study, the effects of the difference between the self-body and the viewpoint in VR environment on the users’performance and their self-body were investigated using block copy task (repositioning the block in the right side to be the same as the block presented in the left side). The results showed that in the condition that the viewpoint passively changed, the significant effects were found in the task completion time and the severity of motion sickness, and in the condition with a horizontal physical shift of the viewpoint, the significant effects of the number of head turns and the severity of motion sickness were found. Thus, the mismatch of the self-body and the viewpoint in VR environment influences the users’performance and their self-body.
目次
第1章 はじめに 1 1.1 背景. . . 1 1.2 目的. . . 1 1.3 Telexistence(テレイグジスタンス) . . . 2 第2章 実験 3 2.1 実験目的 . . . 3 2.2 装置. . . 4 2.2.1 実験装置作成 . . . 6 2.3 実験環境 . . . 8 2.4 被験者 . . . 9 2.5 条件条件 . . . 9 2.6 SSQアンケート . . . 9 2.7 手続き . . . 11 2.7.1 人差し指の位置判断 . . . 11 2.8 ブロックモデル . . . 12 2.9 結果. . . 15 2.9.1 課題完了までの時間 . . . 15 2.9.2 首を動かした平均回数 . . . 16 2.9.3 課題における正答数 . . . 18 2.9.4 人差し指の位置判断 . . . 20 解析方法 . . . 20目次 解析方法 . . . 23 SSQTotalScore . . . 24 Nausea(気持ち悪さ) . . . 25 Oculomotor(眼精疲労) . . . 27 Disorientation(めまい) . . . 28 2.10 考察. . . 30 第3章 まとめ 32 謝辞 33 参考文献 34
図目次
2.1 LEGO ブロック . . . 4 2.2 LEGO クラシック 基礎板. . . 4 2.3 電動雲台(MPR202) . . . 5 2.4 PlayStationEye . . . 5 2.5 Oculus Rift DK2 . . . 5 2.6 LifeCam HD-3000 . . . 5 2.7 作成したステレオカメラ . . . 6 2.8 電動雲台に固定したステレオカメラ . . . 6 2.9 下部を布で覆ったHMD . . . 7 2.10 実験環境1 . . . 8 2.11 実験環境2 . . . 8 2.12 人差し指の位置判断 . . . 11 2.13 ブロックパターン1 . . . 12 2.14 ブロックパターン2 . . . 12 2.15 ブロックパターン3 . . . 13 2.16 ブロックパターン4 . . . 13 2.17 ブロックパターン5 . . . 13 2.18 ブロックパターン6 . . . 13 2.19 ブロックパターン7 . . . 14 2.20 ブロックパターン8 . . . 14 2.21 ブロックパターン9 . . . 14 2.22 ブロックパターン10 . . . 14図目次 2.24 首を動かした平均回数 . . . 17 2.25 課題における正当数 . . . 19 2.26 人差し指の位置判断の記録 . . . 20 2.27 右手の人差し指位置判断 . . . 22 2.28 TotalScore . . . 25 2.29 Nausea . . . 26 2.30 Oculomotor . . . 28 2.31 Disorientation . . . 29
表目次
2.1 SSQアンケート [4] . . . 10 2.2 被験者ごとの平均課題完了時間(秒) . . . 15 2.3 被験者ごとの首を動かした平均回数 . . . 17 2.4 被験者ごとの課題における正答数 . . . 18 2.5 被験者ごとの人差し指の位置判断 . . . 21 2.6 被験者ごとのSSQTotalScore . . . 24 2.7 被験者ごとのNausea . . . 26 2.8 被験者ごとのOculomotor . . . 27 2.9 被験者ごとのDisorientaion . . . 29第
1
章
はじめに
1.1
背景
近年安価なヘッドマウントディスプレイ(HMD)が発売され, 多くの人がHMDを用いて バーチャルリアリティ(VR)を楽しむことが可能になっている. VRという言葉が使用され 始めた当初は, VRの多くはゲームの分野においての活用が想定されていた[2]. しかし近年 では医療や設計ツール,軍事訓練などさまざまな分野での応用が可能になっており, VRに対 する社会からの期待度は高まっている.1.2
目的
VRを用いることで, 現実では不可能な事象を体験することも可能である. その 1つとし て, HMDとカメラを用いることにより自身の視覚のみを身体から切り離すことが可能であ る. 視覚のみを身体から切り離す技術とロボットを用いることで, 救急車内での医師による 遠隔治療や, 防護服なしでの危険区域での活動が可能となる. しかしHMDを装着した状態 で通常とは異なる視点となった場合に, 人間の動作や身体にどのように影響を及ぼすかはま だ解明されていない. よってVR環境において, 身体と視点の不一致により自己身体に及ぼ す効果を検討した.1.3 Telexistence(テレイグジスタンス)
1.3
Telexistence(
テレイグジスタンス
)
前述のような技術は, VR技術を用いて自分自身を瞬時に遠隔地へ運び, そこであたかも 存在するような臨場感をもって行動する技術であるテレイグジスタンスと関連が深い. テレ イグジスタンスを用いることで人間は安全なコックピットの中にいて, ロボットが遠隔地で 働き, 必要に応じて人間がロボットの動作に介入を行うことができる. これによりロボット が不得意としている大局的な判断や協調作業を補うことができ, ロボットの自律性を最大限 に活用することができる[2][5].第
2
章
実験
2.1
実験目的
被験者の正面に障害物を配置し, 被験者はカメラを通じて障害物先の映像が提示された HMDから障害物先を観察した. 被験者は左手に持ったコントローラを操作してカメラの 視点を変え, 右手で左側に提示したモデルとなるブロックと同じ配置になるように右側のブ ロックを再配置するブロックコピー課題[1]を行った. 課題の開始から終了までにかかった 時間, 課題中に首を振った回数, 課題の正当数, 右手の人差し指の位置判断を測定し, 被験者 は課題前後に映像酔いにおける主観評価のアンケートSSQの回答を行った. 3条件で実験を 行った上で, VR環境において, 身体と視点が不一致な状態で作業を行う際の自己身体に及ぼ す効果について検討する.2.2 装置
2.2
装置
本実験では, モデル及び作業用にLEGO Block 16個, ブロックを配置するためLEGO
クラシック 基礎板 2枚を使用した. HMDとしてOculus Rift DK2(Oculus VR社)を使 用した(図2.5). Webカメラとして PlayStationEyeを2台使用し(図2.4), Webカメラを 左右に回転させるため電動雲台として MPR-202を使用した(図2.3). Web カメラである
PlayStationEyeをWindowsのPC で使用するためCL-Eye Platform Driverをドライバ として使用した. 被験者の頭部の動きを観察するためWebカメラとしてLifeCam HD-3000
を使用した.
また, 実験に使用したコンピュータのスペックは以下である.
• OS: Microsoft Windows 8.1 • CPU: Intel社製 Core i5 3.20Ghz
• メモリ: 8GB
2.2 装置
図2.3 電動雲台(MPR202) 図2.4 PlayStationEye
2.2 装置
2.2.1
実験装置作成
本実験では, WebカメラであるPlayStationEye2台を図 2.7のように横向きに固定する ことで両眼視差に対応したステレオカメラとして使用した. 図2.7 作成したステレオカメラ 作成したステレオカメラを電動雲台に固定することでカメラに回転機能を付与した (図2.8). 図2.8 電動雲台に固定したステレオカメラ2.2 装置
本実験で使用するHMDであるOculus Rift DK2は, 装着時に視界の下部から外部の
様子を観察できる構造になっている. よってHMDを黒い布で覆うことにより外部からの視 覚情報を遮断した(図2.9).
2.3 実験環境
2.3
実験環境
実験を行うにあたって被験者から正面45cm, 左15cmの位置にブロックが配置されたモ デルとなる基礎版を, 正面45cm, 右15cmの位置にブロックを配置するワークスペースとな る基礎版を設置した. 被験者が操作を行うブロックはワークスペースの右側に設置した. 続 いてモデルおよびワークスペースの手前側に高さ 27 cmの障害物を配置し, 障害物の上に作 成したステレオカメラ(図2.8)を配置した. 最後にステレオカメラの映像がブロックを斜め 上から見下ろす形になるように障害物に8度の傾斜をつけた. 以上の環境で被験者はHMD を装着し実験を行った. 図2.10 実験環境1 図2.11 実験環境22.4 被験者
2.4
被験者
被験者は右利きの成人大学生10名(男性7名, 女性3名)であった. すべての被験者に実 験内容について説明し, 同意書に署名した上で実験に参加した.2.5
条件条件
被験者は以下の3条件で実験を行った. 1つ目は被験者の正面にカメラを配置し, コントローラでカメラ操作を行いながら課題を 行う「ずれなし条件」, 2つ目は被験者から左に15cmカメラをずらして配置し, コントロー ラでカメラ操作を行いながら実験を行う「ずれあり条件」, 3つ目は被験者の正面にカメラ は配置するが, カメラは自動で左右にヨー方向の回転運動を行っている「オート条件」で あった.2.6
SSQ
アンケート
ブロックコピー課題にて被験者への映像酔いの症状を計測ために Kennedy らの用い た, シュミレータによる酔いや疲労の分析に有効であると考えられる. 16 項目からなるSimulator Sickness Questionnaire(SSQ) [4]を日本語訳[3]したものを使用した. 被験者は
16項目にそれぞれ0から3の 4段階の尺度で主観的評価を行った. SSQの集計方法の手続 きに従って, TotalSocreとSubScoreであるNausea(気持ち悪さ), Oculomotor(眼精疲労), Disorientation(めまい)の得点をそれぞれ算出した. アンケート項目を表に示す. 項目内の
N がNausea, O がOculomotor, D がDisorientaionを指す. 実際に使用したアンケートを 表2.1に示す.
2.6 SSQアンケート
表2.1 SSQアンケート[4]
質問項目 Nausea Oculomotor Disorientation TotalScore
全体的に気分がよくない 1 1 1 疲れた 1 1 頭痛がする 1 1 目が疲れた 1 1 目の焦点が合わせにくい 1 1 つばがよく出る 1 1 吐き気がする 1 1 1 集中するのが難しい 1 1 1 頭がぼうっとする 1 1 ぼやけて見える 1 1 1 目を開けているとふらふらした感じがする 1 1 目を閉じているとふらふらした感じがする 1 1 ぐるぐるとしためまいがする 1 1 胃に違和感がある 1 1 げっぷが出る 1 1
2.7 手続き
2.7
手続き
被験者はまず, 映像酔いにおける主観評価のアンケートであるSSQ(表2.1)に回答した. 次に「ずれなし条件」,「ずれあり条件」,「オート条件」のいずれかでブロックコピー課題 を行った. 課題完了後, 被験者は右手の人差し指の位置判断を行った. 人差し指の位置を回答 後, 被験者はHMDを取り外し, 再びSSQに回答し, 5分休憩をした. これを1試行とし, 1 回の実験で3条件を1試行ずつ実験を行った. これを6セッション実施し, 3試行 × 6回の 計18試行実験を行った. この実験では, 被験者の頭部の動きを観察するため, 後方から別カ メラで被験者を撮影した.2.7.1
人差し指の位置判断
人差し指の位置判断では, 被験者は課題完了後, 映像が提示されたHMDを装着した状態 で, 体を右向きに 90 deg回転させた. 体の回転後, 右手を正面に伸ばした後に右手の上に計 測台をかぶせ, 左手で右手の人差し指の位置を示すことで回答を行った. 被験者が示した人 差し指の位置を計測するため計測台の上にOHPシートを配置し, 被験者が示した位置を油 性ペンで目印をつけることで記録を行った.2.8 ブロックモデル
2.8
ブロックモデル
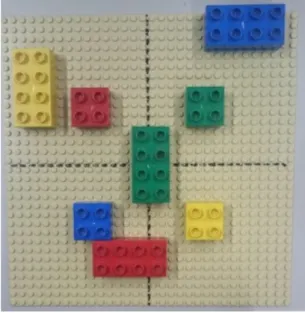
モデルおよびワークスペースの基礎版には, 課題の難易度の調節のため, あらかじめ4色 の正方形のブロックと 2本の直線が配置および記載されている. 4色の正方形のブロックは, 基礎版の中心から縦5マス横5マスの位置にブロックの端がくるように左上から右下にかけ て赤, 緑, 青, 黄の順に配置されている. 2本の直線はそれぞれ基礎版の縦と横の中央を示し ており, 2本の直線の交点が基礎版の中心となる. 被験者は 4色の正方形のブロック及び2 本の直線を手がかりにして課題を行った. ブロックコピー課題のブロックモデルとして以下の10パターンを使用した. 図2.13 ブロックパターン1 図2.14 ブロックパターン22.8 ブロックモデル
図2.15 ブロックパターン3 図2.16 ブロックパターン4
2.8 ブロックモデル
図2.19 ブロックパターン7 図2.20 ブロックパターン8
2.9 結果
2.9
結果
2.9.1
課題完了までの時間
ブロックコピー課題における条件ごとの課題完了までの被験者ごとの平均時間を表2.2に, 被験者全体の平均時間を図2.23に示す. 課題完了までの時間について1要因対応ありの分 散分析を行った. その結果視点の主効果認められた (F (2, 18) = 9.5757, p = 0.0015). また Holm の方法による多重比較を行った結果「ずれなし条件」と「オート条件」, 「ずれあり 条件」と「オート条件」において, 有意な差が認められた. これによりVR上で視点を身体 から切り離した際, 受動的視点の操作が課題完了までの時間遅延に影響することが示された. 表2.2 被験者ごとの平均課題完了時間(秒) ずれなし条件 ずれあり条件 オート条件 被験者1 81.5 84 88.4 被験者2 102.8 115.2 111.5 被験者3 104.8 103.5 163.3 被験者4 72.3 65.8 78.8 被験者5 141.5 126.8 191.7 被験者6 71.2 72.5 73.5 被験者7 67.3 70.8 94.7 被験者8 63.2 66 89.2 被験者9 80.8 79.2 89.8 被験者10 59.2 55.3 76.52.9 結果 図2.23 課題完了までの時間
2.9.2
首を動かした平均回数
撮影した映像から, 条件ごとに課題中に首を動かした回数を計測した被験者ごとの平均 値を表2.3に, 被験者全体の平均値を図2.24に示す. 首を動かした回数について1要因対 応ありの分散分析を行った. その結果視点の主効果が認められた (F (2, 18) = 5.3842, p =0.0147). またHolmの方法による多重比較を行った結果「ずれなし条件」と「ずれあり条 件」において, 有意な差が認められた. これにより、VR上で視点を身体から切り離した際, 物理的な視点のずれにより、首を動かした回数が増加することが示された.2.9 結果 表2.3 被験者ごとの首を動かした平均回数 ずれなし条件 ずれあり条件 オート条件 被験者1 3.83 4.83 4 被験者2 3 2.5 2.5 被験者3 3 3.83 4 被験者4 3.17 3.5 3.5 被験者5 2.5 3.5 3.83 被験者6 3.17 3.67 2.17 被験者7 3 3.5 3.83 被験者8 3.67 5.67 4.33 被験者9 3.83 5.17 4.17 被験者10 4 4.33 3.33
2.9 結果
2.9.3
課題における正答数
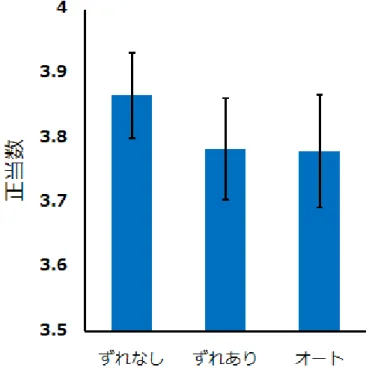
課題における被験者ごとの平均正答数を表2.4に, 被験者全体の平均正答数を図2.25に示 す. 課題における正当数を1要因対応ありの分散分析を行った. 分析の結果, 視点の主効果 は認められなかった(F (2, 11) = 0.7181, p = 0.5011). 表2.4 被験者ごとの課題における正答数 ずれなし条件 ずれあり条件 オート条件 被験者1 4 3.83 3.8 被験者2 4 4 4 被験者3 4 4 4 被験者4 3.83 3.83 3.83 被験者5 4 3.83 3.83 被験者6 4 4 3.33 被験者7 3.33 3.33 3.17 被験者8 3.83 4 4 被験者9 4 3.67 3.83 被験者10 3.67 3.33 42.9 結果
2.9 結果
2.9.4
人差し指の位置判断
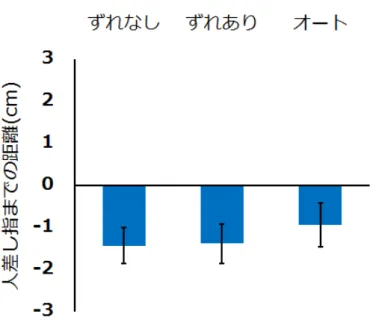
解析方法 1枚のOHPシートには1セッション(3条件)の人差し指の位置が記録されており, 4色 の油性ペンを用いることで条件間の比較を行った(図2.26). 黒色の目印が本来の人差し指の位置であり, 赤色が「ずれなし条件」 で記録した人差し指 の位置, 緑色が「ずれあり条件」 で記録した人差し指の位置, 青色が「オート条件」 で記録 した人差し指の位置を示す. 解析の際には, 本来の人差し指の位置から被験者が示した位置の差分を求めることで数値 化を行った. 数値化の際には, 被験者が示した位置が本来の位置より左側であるなら負の値 を右側になるなら正の値をとるようにした. 図2.26 人差し指の位置判断の記録2.9 結果 解析結果 被験者ごとの右手の人差し指位置判断を表2.5に, 被験者全体の人差し指の位置判断を図 2.27に示す. 右手の人差し指位置判断を1要因対応ありの分散分析, Holmの方法による多 重比較を行った. 分析の結果, 視点の主効果は認められた(F (2, 18) = 4.2487, p =0.0308) が, 「ずれなし条件」と「ずれあり条件」の間には有意な差は認められなかった. 表2.5 被験者ごとの人差し指の位置判断 ずれなし条件 ずれあり条件 オート条件 被験者1 -2.6 -2.68 -2.54 被験者2 1.32 1.4 2.77 被験者3 -0.22 0.67 0.03 被験者4 -1.4 -1.72 -1.1 被験者5 -0.98 -1.33 -0.95 被験者6 -1.33 -1.18 -0.62 被験者7 -2.89 -3.89 -3.32 被験者8 -0.37 -0.58 0.25 被験者9 -2.55 -1.68 -2.01 被験者10 -3.25 -2.73 -1.8
2.9 結果
2.9 結果
2.9.5
SSQ
アンケート
解析方法
SSQアンケートはTotalScoreとSubScoreであるNausea(気持ち悪さ), Oculomotor(眼 精疲労), Disorientation(ふらつき)の値を合計し検討する. Kenned et al.(1993) に従い, 各 スコアは以下のように算出した. TotalScoreは16項目の合計値に重み係数である3.74を掛 けることで求めた. NauseaはNの項目を合計し, 最後に9.54を掛けることでNauseaScore
を求めることが可能である. Oculomotor は O の項目を合計し, 最後に7.58を掛けること でOculomotorScoreを求める. Disorientaion は, D の項目を合計し, 最後に 13.92を掛け ることでDisorientaionScoreを求める.
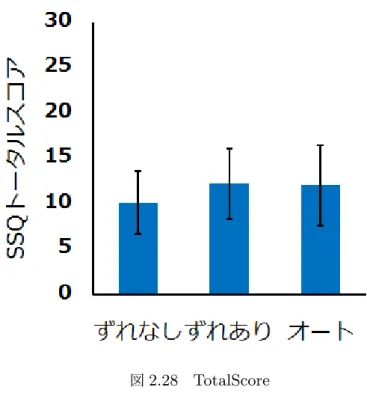
2.9 結果 SSQTotalScore 全被験者のブロックコピー課題終了後の平均をとった被験者ごとのSSQTotalScoreを表 2.6 に, 被験者全体の TotalScoreを図2.28に示す. SSQTotalScoreについて, 1 要因対応 ありの分散分析および多重比較を行った. 分析の結果, 視点の条件の効果は見られなかった (F (2, 18) = 3.1676, p = 0.0663). 表2.6 被験者ごとのSSQTotalScore ずれなし条件 ずれあり条件 オート条件 被験者1 6.23 8.73 6.73 被験者2 5.61 9.35 5.61 被験者3 6.73 7.48 7.48 被験者4 2.49 4.99 2.49 被験者5 29.17 32.91 40.39 被験者6 0.62 0.62 0.62 被験者7 30.54 35.53 34.28 被験者8 17.95 20.2 20.94 被験者9 2.49 2.49 2.49 被験者10 0 0 0
2.9 結果
図2.28 TotalScore
Nausea(気持ち悪さ)
被験者ごとのブロックコピー課題終了後の平均をとったSSQSubScoreであるNauseaを 図 2.7に, 被験者全体の Nausea を図 2.29に示す. SSQSubSocre である Nausea につい
て, 1要因対応ありの分散分析を行った. その結果視点の主効果が認められた(F (2, 18) = 5.4010, p =0.0145). ただしHolmの方法による多重比較の結果, 条件間における有意な差は 認められなかった
2.9 結果 表2.7 被験者ごとのNausea ずれなし条件 ずれあり条件 オート条件 被験者1 4.77 7.95 9.54 被験者2 4.77 12.72 4.77 被験者3 1.91 3.82 1.91 被験者4 6.36 11.13 6.36 被験者5 19.08 28.62 20.99 被験者6 0 0 0 被験者7 11.13 19.08 14.31 被験者8 11.45 9.54 11.45 被験者9 0 0 0 被験者10 0 0 0
2.9 結果
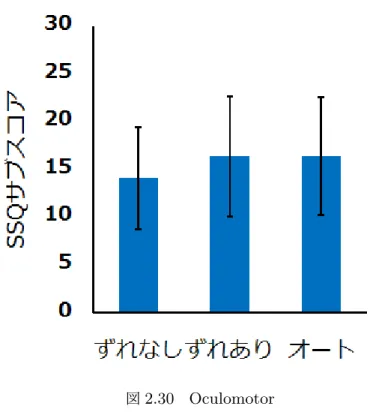
Oculomotor(眼精疲労)
被験者ごとのブロックコピー課題終了後の平均をとったSSQSubScoreであるOculomotor
を表2.8に,被験者全体のOculomotorを図2.30に示す. SSQSubSocreであるOculomotor
について, 1要因対応ありの分散分析を行った. 分析の結果視点の主効果が認められた(F (2, 18) = 4.1179, p =0.0337). ただしHolmの方法による多重比較の結果, 条件間における有意 な差は認められなかった. 表2.8 被験者ごとのOculomotor ずれなし条件 ずれあり条件 オート条件 被験者1 7.58 8.84 9.1 被験者2 3.32 7.58 6.32 被験者3 12.13 12.13 13.64 被験者4 0 1.26 0 被験者5 28.8 35.35 37.9 被験者6 1.26 1.26 1.26 被験者7 56.85 66.96 63.17 被験者8 22.74 22.29 27.29 被験者9 5.05 5.05 5.05 被験者10 0 0 0
2.9 結果
図2.30 Oculomotor
Disorientation(めまい)
被験者ごとのブロックコピー課題終了後の平均をとったSSQSubScoreである Disorien-tation を表 2.9 に, 被験者全体の Disorientaion を図 2.31に示す. SSQSubScore である
Disorientationについて, 1要因対応ありの分散分析を行った. 分析の結果, 視点の条件の効 果は見られなかった. (F (2, 18) =1.2233 , p = 0.3176 ).
2.9 結果 表2.9 被験者ごとのDisorientaion ずれなし条件 ずれあり条件 オート条件 被験者1 11.6 13.92 11.14 被験者2 6.96 11.6 6.96 被験者3 0 0 0 被験者4 0 2.32 0 被験者5 50.11 44.5 75.17 被験者6 0 0 0 被験者7 44.08 44.08 48.72 被験者8 19.49 27.84 27.84 被験者9 9.28 9.28 9.28 被験者10 0 0 0
2.10 考察
2.10
考察
課題完了までの時間は, 「ずれなし条件」と「オート条件」および「ずれあり条件」と 「オート条件」間で有意な差が認められ, 受動的な視点の移動から完了時間遅延が見られるこ とが示された. 「オート条件」では, 自身の意思で視点操作が不可能であった. よってモデル の観察やブロックの配置の際に通常より多く時間がかかったため, 「オート条件」が課題完 了までにより多く時間がかかってしまったと考えられる. 首を動かした回数では, 「ずれなし条件」と「ずれあり条件」間において有意な差が認め られ, 物理的な視点のずれにより余計な首の動きの増加が示された. 「ずれあり条件」では, 視点が本来より左側に15 cm ずれた状態で課題を実施した. そのためブロックの配置の際 に, 視点と身体のずれを修正をするため, 「ずれあり条件」では多く首を振ったと考えられ る. 「オート条件」では常に視界が動いているため, 視界が注視したいものから離れる際に より長く観察を試みたため, カメラの回転運動と反対方向に首を動かそうとし, 首を動かし た回数が増加したのではないかと考えられる. 人差し指の位置判断では, すべての条件において本来の人差し指の位置より左側に人差し 指があると判断した. 本実験では, HMDの映像を提示したまま右に90 deg体の回転を行っ た. 視点の映像に変化がない状態で体を右側に回転させたため, 視覚と前提感覚のずれから すべての条件において人差し指が本来の位置より左側にあると判断した可能性があると考え られる. SSQスコアのTotalScoreおよびSubScoreから、本実験では強い映像酔いが生じないこ とが示された. これは1 試行あたりのVR上での視点の操作時間が90秒前後の短時間で あったことと, 1 試行ごとに5分の休憩が存在したため休憩中に映像酔いの症状が回復した と考えられる. SubScoreのNause(気持ち悪さ)において視点の有意な効果が認められたのは, ほかの項 目と異なりNauseaは全体的にスコアが低い特徴と, 条件間に有意な差は認められなかった2.10 考察 件」が他の条件と比較しスコアが高いのは, 視点と身体のずれを修正するために多く首を 振った結果, 顔の動きによる前庭覚と視覚の不一致がより多くもたらされたためと考えら れる. SubScoreのOculomotor(眼精疲労)に有意な効果が認められたのは,「ずれあり条件」と 「オート条件」がスコアが高かったためと考えられる. 「ずれあり条件」では, 視点のみが本 来の位置より左に15cmずれた状態で作業を行ったため視点と自己受容感覚のずれからスコ アが高くなり, 「オート条件」では, 左右の視点移動の切り替わりが被験者の意思とは無関 係で急に行われたためスコアが高くなってしまったと考えられる.
TotalScoreとSubScoreのDisorientaion(めまい)は, グラフが横ばいになっているため,
有意な効果が認められなかったと考えられる. SubScoreのDisorientation(めまい)が横ば
いなグラフになったのは, ブロックコピー課題では自身の体を大きく動かす動作や運動は必
要ないため, Disorientationに関連するような体全体の視覚と前庭覚の不一致は生じなかっ たためと考えられる.
第
3
章
まとめ
近年安価なHMDが発売され, 多くの人がHMDを用いてバーチャルリアリティ(VR)を 楽しむことが可能になっている. VRを用いることで, 現実では不可能な事象を体験するこ とも可能である. その1つとして, HMDとカメラを用いることにより自身の視覚のみを身 体から切り離すことが可能である. また、今後はロボットを用いた救急車内での医師による 遠隔治療や, 防護服なしでの危険区域での活動など複数の分野においてVR上で自身の視覚 のみが身体から切り離された状態で作業を行うことが考えられる. そこで本実験では, VR 環境において, 身体と視点が不一致な状態で作業を行う際の自己身体に及ぼす効果について 検討した. 今回の研究からVR環境における視点操作により, 自己身体に異なる影響を及ぼすことが 示された. 受動的に視界が変化する条件では課題完了時間が長くなった. 身体と視点に物理 的なずれがある条件では, 多く首を動かしてしまう効果が見られた. また身体と視点の不一 致により気持ち悪さや眼精疲労の映像酔いの症状がより大きく引き起こされ, 人差し指の位 置判断にも影響があった. しかし, SSQのトータルスコアと映像酔いで発生するめまいにつ いては, 条件ごとにおける視点操作の影響を受けなかった.謝辞
本研究を進めるにあたって, 多くのご指導と多大な助言を下さった高知工科大学情報学群 の繁桝博昭先生に深く感謝いたします. またお忙しい中で副査を努めご指導いただきました 任向實先生と中原潔先生に感謝いたします. 自分たちの研究や講義などで忙しいにもかかわ らず被験者として実験に参加いただいた繁桝研究室のみなさん, 友人たちに感謝いたします. 本当にありがとうございました.参考文献
[1] Pelz J, Hayhoe M, Loeber R ”The coordination of eye, head, and hand movements in a natural task”, Experimental Brain Research, 139, pp.266-277(2001)
[2] 舎官 日章, 佐藤 誠, 廣瀬通孝,バーチャルリアリティ学,コロナ社,2011.
[3] 松嵜直幸, 原澤賢充, 繁桝博昭, 森田寿哉, 伊藤崇之, 齊藤隆弘, 佐藤隆夫, 相澤清晴, 北 崎充晃, ”能動的観察による映像酔いの低減”日本バーチャルリアリティ学会論文誌, 15, 41-44(2010)
[4] Kennedy R S, Lane N E, Berbaum K S ”Simulator Sickness Questionnaire: An Enhanced Method for Quantifying Simulator Sickness”, THe International Journal of Avaiation Psychology, 3, 203-220(1993)
[5] 舎官 日章, バーチャルリアリティ入門(2002)
[6] 茅原拓朗, 小木哲郎, 北崎充晃, 吉野 知也, 廣瀬通孝 ”マルチメディア・バーチャル・ラ ボラトリーによる 遠隔知覚・認知心理学実験システム” The Virtual Reality Sociaty of Japan, 8, 57-64(2003)
[7] 茅原拓朗, 北崎充晃 ”VRを利用した心理実験室の動向と心理学の未来” 日本バーチャ ルリアリティ学会誌, 8, 27-32(2003)
[8] Ballard D H, Hayhoe M M, Pelz J B ”Memory representationsin natural tasks” J Cogn Neurosci 7, 6882
[9] Abrams R, Meyer D, Kornblum S ”Eye-hand coordination: oculomotor con-trol in rapid aimed limb movements” J Exp Psychol Hum Percept Perform 15, 248267(1990)
[10] Land M F ”Predictable eye-head coordination during driving” Nature 359, 318320(1992)



![表 2.1 SSQ アンケート [4]](https://thumb-ap.123doks.com/thumbv2/123deta/8055850.846056/18.892.115.862.348.978/表21SSQアンケート4.webp)