ファジィ推論を用いたネットワーク構造モデルによる自動車すり抜け運転動作などのシミュレーションと渋滞解析
8
0
0
全文
(2) Vol. 42. No. SIG 14(TOM 5). 91. 自動車すり抜け運転動作などのシミュレーションと渋滞解析. 求められる. 微視的モデルによるアプローチでは,道路をリンク. では道路モデルや運転動作モデルは,問題ごとにその 問題に合わせた特有なモデルを構築するのではなく,. で表し,いくつかのブロックに分けて,自動車の動き. すべてのシミュレーションで共通のモデル構造となっ. をブロック間の移動として流出・流入可能量から決定す. ていて,データを変えるのみで状況の異なる様々な渋. るもの4)や,道路をメッシュで細分化して自動車の動. 滞現象に対応できることなどであり,これらを 3 つの. きをメッシュ間の移動で表し,移動機構をペトリネッ. シミュレーションを通じて明らかにする.. トで表現したり5) ,セルラオートマトンで表現したり するもの6)が主流となっている.しかしこれらは自動. 2. MITRAM の概要. 車の動きをブロック間やメッシュ間の動きとしてとら. MITRAM のシステム構成を図 1 に示す.MITRAM. えているために,自動車や運転者の特性や道路の状況. では従来の多くのシミュレータと異なり,道路モデル. を細かく反映させることが難しく,また自動車の動き. と運転動作モデルを切り離し,独立したモデルとして. 自体,自然さに欠ける.一方,市街地では違法駐車の. 構築している.これによりモデリングは複雑となるが,. 存在やバス停の位置,右折車線の長さ,信号のタイミ. リンクやブロック,メッシュの方法にみられる制限さ. ングといった細かい要素が渋滞に大きな関わりを持ち,. れた自動車の動きが回避でき,また道路,自動車に関. また短い時間の動的な変化が全体に影響するので,シ. わる様々な要素を柔軟に取り扱えるようになる.. ミュレータとしてより精緻なものが必要となる.. 道路モデルでは,シミュレーションの対象となる実. 我々は上記のような要請から,実態に即してかなり. 際の道路上に図 2 に示すように仮想走行レーンを設. 細かな自動車の動きや道路の状況を取り入れることが. 定する.これは運転者が自分の進もうとする走行進路. 可能なシミュレータ MITRAM( MIcroscopic model for analyzing TRaffic jaMs on the city area )を開. を図 2 のようにあらかじめイメージとして頭の中に描. 発しており,そのシステムのコンセプトや構成法につ. 路に沿うように操舵操作を行う11) .MITRAM では,. いて文献 7),8) で,システム内部で最も重要な運転動. この仮想走行レーンを実際の道路状況から道路モデル. いているという仮説に基づくもので,自動車はその進. 作モデルの詳細について文献 9) で,さらに複雑な運 転動作の階層構造モデルによる実現について文献 10) で提案してきた.運転者や道路の様々な要素を考慮し. 道路データ. 自動車データ. 道路網入力 エディッタ. 運転論理 運転論理 構築ツール. モデルの作成 シミュレーション データの流れ. た運転動作モデルを構築する場合,単純な微分方程式 や統計式のみで作成するのは困難である.MITRAM. 道路データ ベース. 自動車データ ベース. ファジィ推論 データベース 表示. では,ファジィ推論を取り入れたネットワーク構造モ. MITRAM データローダ. ディスプレイ 機能. デルを用いてこれに対処しているのが特色である. 本論文では,提案してきた上記の MITRAM におけ るモデルを統合して,3 つの渋滞現象についてシミュ レートし解析する.そしてシミュレーションにおいて 本ネットワーク構造モデルが有用なことを示す.シミュ. 自動発生,管理 道路ネットワーク モデル 走行レーンモデル. アニメーション 出力 運転論理 データ供給 モデル. 仮想臨時走行 レーンモデル シミュレータが生成. 統計処理 運転論理モデル 推論機構. レーションの対象は,渋滞現象の解析で重要となる,. 統計処理 機能. 道路上に駐停車車両などの障害物が存在する場合のす り抜け運転の影響,踏切りによる停止の影響,運転者 の個人特性の相違による影響である.この 3 つのシ ミュレーションをそれぞれ MITRAM 上で行い,個々. 出力. 道路モデル. 運転動作モデル. 図 1 MITRAM のシステム構成 Fig. 1 System structure of MITRAM.. の自動車の自然な動きを表示できるデ ィスプレ イ機 能を用いて渋滞の状況を視覚的に検証するとともに, 現象の統計的な特性を調べる.なお従来のブロックや. 駐車車両 走行車両. 仮想走行レーン. メッシュを用いた方法と比べて MITRAM の特色は, 自動車の動きが視覚的に把握でき,時々刻々と変化す る渋滞の様子がリアルに観察できること,運転者の個 人特性など細かい要素を分かりやすい形でモデリング できシミュレーションに反映できること,MITRAM. 走行車両. 図 2 仮想走行レーンのイメージ Fig. 2 Image for virtual running lane..
(3) 92. 情報処理学会論文誌:数理モデル化と応用. Dec. 2001. で設定し,運転動作モデルに提供する.自動車はこれ. すように 2 入力 1 出力の関数機能をノードとしたネッ. に沿って進行するので,運転動作モデルでは複雑な判. トワーク構造で構成する.このノードにはファジィ推. 断を要する操舵操作を考慮しなくてすみ,モデルの簡. 論をはじめ,四則演算,推論演算,関数計算などが組. 略化が可能となる.. み込めるようになっている.. 運転動作モデルは 3 章で述べるように,ファジィ推. 図 4 に示した運転論理系は,運転動作で基本となる. 論を取り入れたネットワーク構造モデルを用い,それ. 追従運転論理である.この図で Diff は差の演算,Small. を並列化および階層化している9),10) .. は小さい方の値をとる演算であり,Fuzzy はファジィ. また MITRAM では,シミュレーションの状況を視 覚的に表示するディスプレイ機能,および統計的な処 理を行う統計処理機能を備えている.. 推論である.. 3.2 階層化と並列化 運転動作モデルでは,運転者の無意識的な運転判断 と意識的な運転判断を階層的に分離して扱う.ここで,. 3. 運転動作モデルの構造. 無意識的な運転判断を下位論理,意識的な運転判断を. 3.1 ネット ワーク構造モデル 汎用性のあるシミュレータを構築するには,様々な 状況における運転者の判断を反映できる運転動作モデ. 上位論理とする.下位論理は運転中つねに起動しつづ けるものとし,上位論理は交通状況などに応じて発火 するものとする.. ルが必要となる.そこでこの運転動作モデルの論理系. 下位論理では,運転動作で最も重視すべき「車を衝. を,実際の人間の運転動作に基づいて直観的に分かり. 突させずに運転する」という規範を設け,それに基づ. やすい構造で表現する.そのために全体を図 3 のよ. いて 4 つの運転論理系に分離する.すなわち,. うに階層化および並列化して複数のサブモデルに分割. (1) (2). 他の車の後面に衝突させない運転論理,. (3) (4). 他の車の正面に衝突させない運転論理,. し,それらの組合せで構成する.各論理系は図 4 に示 上位論理. 他の車の側面に衝突させない運転論理, 車以外に衝突させない運転論理,. である.この 4 つの運転論理系を図 4 のようにそれ. 現時点での判断用情報 レーン情報 自車の情報 他車の情報 信号情報. 上位論理. 選択推論. 早期判断. 結果選択. ぞれネットワーク構造モデルで作成し(図 3 の運転論 ,さらにそれらを上位論理により有機 理 1∼4 に対応) 的に結合する.この 4 つの論理系はつねに並列に作動 し,処理の高速化を行う.. 運転論理1(追従運転) 運転論理2(側方制限運転) 運転論理3(対向運転) 運転論理4(前方制限運転). 運転動作モデルは,0.1 秒ごとに各自動車の運転操 作量を算出しており,500 台程度までの台数のリアル タイムのシミュレーションを行えるようにしている.. 早期結果出力 推論結果出力. 下位論理. 図 3 運転動作モデルの 4 つの運転論理系(下位論理)と上位論理 Fig. 3 Four drivers maneuvering models (lower layer model) and upper layer model.. このためにファジィ推論を含むネットワーク構造モデ ルの情報処理を高速に行う専用の処理系を開発し,導 入している12) .. 4. シミュレーション 前車位置. 前車後部位置 車間距離. Diff. 前車長. Diff. Fuzzy1. 市街地での道路交通シミュレーションでは,駐停車 しろそれは渋滞の大きな原因になる可能性がある.こ. 車速差 Diff. 自車速度. 速差加減速. 4.1 すり抜け運転 4.1.1 モデル構造 車両などの障害物の影響を無視することができず,む. 自車位置 前車速度. Fuzzy:ファジィ推論 Diff:差演算 Small:最小値選択演算. 車間加減速. Small. 加減速操作量. Fuzzy2. 図 4 ネットワーク構造モデル( 追従運転論理) Fig. 4 Example of network-structured model (Drivers maneuvering model of succeeding vehicle).. の障害物を考慮するとき,すり抜け運転動作のモデル が必要となるが,このすり抜け運転動作のモデル化は 意外に難しい.これを取り上げた先行研究として文献. 13) のコンパートメントと名付けられたメッシュ法を応 用したモデルによるものがある.このモデルでは,本 来のメッシュに裏コンパート メントという障害物を入.
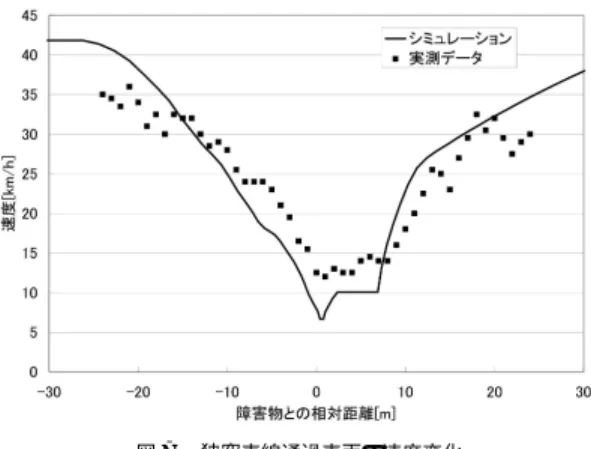
(4) Vol. 42. No. SIG 14(TOM 5). 93. 自動車すり抜け運転動作などのシミュレーションと渋滞解析. 前車位置 前車後部位置 Diff. 前車長. 車間距離 Diff. 速差加減速. 自車位置. Fuzzy. 追従加減速. 前車速度. Small. 車速差 車間加減速 Diff Fuzzy. 追従運転論理. 自車速度 現車線幅 現車線幅余裕 Diff. 自車幅. すり抜け運転 加減速操作量 現幅目標速度. 側方加減速. Fuzzy. 目標速度. Small. Fuzzy. 前方車線幅余裕 Small Diff. 前方車線幅. 前方目標速度 Fuzzy. 自車状況. 指定目標速度 Fuzzy. 車線狭窄位置 車線幅変更位置 Diff. 自車位置. 側方制限運転論理. Fig. 5. Fuzzy:ファジィ推論 Diff:差演算 Small:最小値選択演算. 図 5 すり抜け運転動作モデル Model of drivers maneuvering around obstacles.. れたメッシュを重ねて定義することにより,メッシュ 法の欠点である 2 台以上の自動車が同時に同一メッ シュに存在できないという点を解決し,さらに残った 道路有効幅員をメッシュとは関係なく計算しなおすこ とにより,自車幅との関係で走行速度を求め,制御を 行っている.ただ有効幅員と車速との関係を単純に一 次式で表しているので,運転者の特性による運転動作 の差異などは別の方法でシミュレーションに組み込ま なくてはならない. 本研究では,障害物による車線幅の狭窄化を,運転. Fig. 6. 図 6 すり抜け運転のシミュレーション Simulation for drivers maneuvering around obstacles.. 者の脳裏に形成される臨時走行レーンで対処する.こ のとき,運転者は狭窄化した車線から以下のような運. 線の幅員を 4.0 m として,上より駐停車車両などの障. 転制限を受けて操作量を決定する.. 害物が存在しない場合,そして障害物により狭路幅が. • 現在走行中の位置における車線幅による操作制限. 2.8 m から 0.1 m ずつ 2.2 m まで順次減少した場合の. • 将来通過する位置の車線幅による操作制限 この論理は図 3 の側方制限運転論理であり,これと. 車両の流れを示している.この道路モデル上で,車幅. 運転論理の最も基本的な役割をする追従運転論理とを. 発生させ,一般の市街地交通でよく見られる状態での. 1.7 m,車長 4.7 m の同一寸法の車両を 2,580[台/時]. 状況判断を含めて上位論理のもとで接続することで,. 渋滞状況を再現した.表 1 はその状況を統計的にまと. すり抜け運転動作モデルを構成する.このモデルを. めたもので,交通容量は狭路幅が 2.6 m までは障害物. 図 5 に示す.. による影響を受けないが,2.5 m 以下になると急激に. 4.1.2 シミュレーション結果. 減少することが分かる.すなわち,ここで設定した状. 構築し たすり抜け運転動作モデルを用いたシミュ. 況では幅 1.5 m 以上の障害物は渋滞を引き起こすこと. レーションの状況の一部を図 6 に示す.この図は車. が分かる.これはディスプレ イ上の観測からも確認さ.
(5) 94. 情報処理学会論文誌:数理モデル化と応用. Table 1. Table 2. Dec. 2001. 表 1 狭路幅と交通容量 Relations between road width and traffic capacity. 狭路幅 (m). 交通容量 (台/時). 2.8 2.7 2.6 2.5 2.4 2.3 2.2. 2,580 2,580 2,580 1,200 1,008 924 816. 表 2 車幅と平均速度 Relations between vehicles width and average speed. 発生車種. 平均速度 [km/h]. 小型車のみ 普通車のみ 大型車のみ 全種混合. 56.9 45.7 24.6 24.7. Fig. 7. 図 7 狭窄車線通過車両の速度変化 Speed change of vehicles in running around obstacles.. が急激に低下する.すなわち,車両の多く行き交う道 路での駐車車両などの障害物は渋滞の原因となり,周 辺の交通に影響を与えることが分かる.. Table 3. 表 3 車両発生台数と平均速度 Relations between vehicle generating rate and average speed. 車両発生数 [台/時]. 平均速度 [km/h]. 500 750 1,000 1,250 1,500 1,750. 56.7 48.7 47.6 39.9 29.2 23.4. れた.. 以上の 3 種のシミュレーション結果から,狭窄道路 幅員と車幅および 通過車速など の関係を明確に表現 したモデルの構築ができた.これらのシミュレーショ ン結果が実道路でのデータとど のように一致するか は,詳しく検証する必要がある.しかし,実道路に狭 窄部分を設け,種々のすり抜け運転の特性を実測デー タとして得ることは大変難しい.そこで現段階では,. MITRAM のディスプレイ機能を用いてシミュレーショ ンの状況を視覚的に確認,検証することを最も重視し ている.なお文献 13) では,大学構内での走行実験に. 次に,車線幅員 4.0 m で車両発生台数 1,000 [台/時]. より,すり抜け時の速度データを得ている.この実験. の道路を想定し,この車線の一部分を障害物により狭. では走行距離および最高速度とも限られた状況のもと. 路幅 2.5 m にする.この条件のもとで,通過車両の車. で測定が行われている.その意味では限定されたデー. ,1.8 m( 普通車) ,2.0 m( 大型 幅を 1.6 m( 小型車). タであるが,それらとともに本研究でのすり抜け運転. 車)として,それぞれ単一車種の場合,等比率で混合. 動作の速度変化をプロットすると図 7 のようになる.. した場合についてシミュレーションを行った.その結. これより本モデルの特性が実測データに近いことが分. 果,通過車両の車幅と平均速度の関係は表 2 のように. かる.. なった.この結果より,車幅が大きくなると平均速度 の低下が著しいことが分かる.また車種を混合した場 合,最も速度が遅くなる車種,すなわち大型車の速度 に全体が支配される様子が分かる.. 4.2 踏切り横断運転 4.2.1 モデル構造 鉄道と道路が同一平面上で交差する踏切りは,一般 に渋滞の大きな原因としてあげられる.特に都市部で. さらに,車両発生台数を変えた場合について車線. の列車のダ イアグラムは過密化しており,短い周期で. の狭窄化による影響を調べた.ここでの道路条件も,. 遮断機の開閉が繰り返される.これによる渋滞は局所. 4.0 m 幅の車線の一部が障害物により 2.5 m に減少し. 的なものにとどまらず,周辺交通に蔓延することがし. ているものとした.車両発生台数を 500 [台/時] から. ばしばあることから,踏切りによる渋滞発生のシミュ. 1,500 [台/時] まで段階的に変化させ,それによる平均. レーションは非常に重要である.. 速度の変化を測定した.その結果を表 3 に示す.車両. 踏切りを横断する車両の挙動は,次のようになる.. 発生台数を大きくした場合,障害物の影響で平均速度. • 踏切りが開いているときは,一時停止と同様の運.
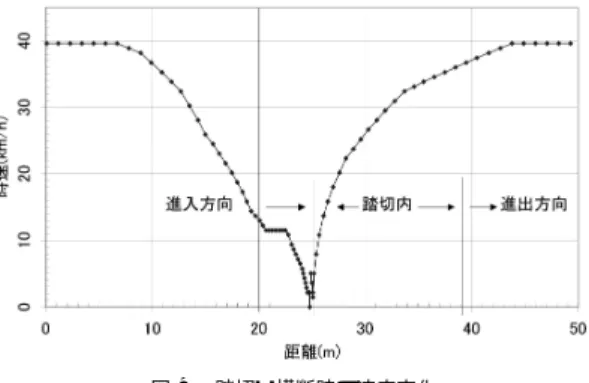
(6) Vol. 42. No. SIG 14(TOM 5). 95. 自動車すり抜け運転動作などのシミュレーションと渋滞解析. 前車位置 前車後部位置 Diff. Fuzzy Add Diff Div Small Lib. 車間距離. 前車長. Diff. 速差加減速. 自車位置. Fuzzy. 追従加減速. 前車速度. ファジィ推論 和演算 差演算 商演算 最小値選択演算 ライブラリ関数. Small. 車速差 車間加減速 Diff Fuzzy. 自車速度. 追従運転論理 踏み切り距離 Small Diff. 踏み切り横断運転 加減速操作量. 要進行距離. 踏み切り位置. Add. 通過時間 Div. 踏み切り長 進行必要距離 Add. 踏み切り加減. 自車長. Fuzzy. 信号進行 最終可能性. Lib. 進行条件. 信号色. 進行可能性. Lib. Lib. Lib 停止解除 Lib. 状況選定. 踏み切り動作 Lib. 残時間 Lib. Lib. 信号残時間. 踏み切り運転論理. Fig. 8. 図 8 踏切り横断運転動作モデル Drivers maneuvering model in railroad crossing.. 転動作である. • 踏切りが閉じているときは,赤信号による停止と 同様の運転動作である. すなわち,踏切り横断運転のモデルは MITRAM で すでに構築されている信号による停止・発進モデルを. に踏切り特有の論理を上位論理として加えることでモ デル化できる.この踏切り横断運転動作モデルを図 8 に示す.このモデルはデータを変えれば他の各種踏切 りにも対応できる一般的な構造となっている.. 4.2.2 シミュレーション結果. 拡張して構築することができる.前方に踏切りのある. まず,本モデルを用いて踏切り周辺での車両の挙動. 道路を走行する車両は,踏切りの開閉にかかわらず必. を車両速度の変化から検証する.図 9 に踏切り周辺で. ず踏切り前でいったん停止をする.したがって運転者. の車両の速度変化をグラフで示す.踏切り前では停止. から見た踏切りは一時停止と赤信号の組合せと見なせ. 線に向かって減速を行い,一時停止をする.前方に進. る.そこで一時停止を信号による停止・発進モデルで. 行できるスペースを確認した後,再び加速を行い踏切. 表す場合,一時停止の停止線の前までは赤信号と同じ. りを通過している.この様子は,実際の車両の挙動を. メカニズムにする.そして車両速度が 0 となった直後. よく再現しているといえる.. に信号が青となり発進する機能を付加すればよい.さ. 次に,このモデルを用いたシミュレーションにより,. らに,踏切りを通過する際には自車が踏切り内に立ち. 踏切りによる渋滞の対応策の 1 つである「踏切りの交. 止まってしまうことのないように,踏切りを越えた先. 通信号機化(通過列車がないとき,踏切りを青信号と. が渋滞していないかど うかを判断する必要がある.つ. する対策) 」の検討を行った.対象とするのは図 10 に. まり,踏切りの先に自車が進行できるだけのスペース. 示す JR 敦賀駅付近の舞崎踏切りである.そこでは実. の有無を確認するのである.これらの論理は先のすり. 際に信号機化の実験を行い実測データを得ている14) .. 抜け運転動作モデルと同様に下位論理の追従運転論理. この実測データに基づいて,本研究とは異なる手法に.
(7) 96. Dec. 2001. 情報処理学会論文誌:数理モデル化と応用 表5. 距離感に関する個人特性を考慮したモデルによるシミュレー ション結果 Table 5 Simulation results by model in considering the individual characteristics for sense of distance. 距離感の混合割合 (%) 0, 50, 100. 図 9 踏切り横断時の速度変化 Speed change of vehicles in crossing a railroad.. Fig. 9. 25m. 舞崎踏切. A B C D E F G. 100 0 0 33 20 30 10. 0 100 0 33 60 60 60. 0 0 100 33 20 10 30. 交通容量 [台/時]. 1,836 1,404 1,080 1,308 1,368 1,464 1,332. をモデル化する.. 舞崎交差点. そこで車間距離の相違を,運転者によって実際の車. 敦賀駅方. 間距離と,感じる認識車間距離の格差に起因するもの JR敦賀港線. とする.この認識車間距離を,個人特性に応じた距離 敦賀市内. 北陸自動車道 敦賀I.C.入口. 図 4 の追従運転論理の車間距離の部分に付加する.な 踏切交通信号機. 連動させた信号機. 敦賀港駅方. Fig. 10. 感と実際の車間距離からファジィ推論で求め,これを. 図 10 舞崎踏切り周辺の道路環境 Road situations around Maizaki railroad crossing.. お,距離感は 0 から 100 までの範囲とする( 0 は距離 感が最も短く,100 は最も長いことを意味する) .こ のように MITRAM ではネットワーク構造モデルにし ているために,運転者の個人特性を分かりやすい形で. 表 4 踏切り信号機化のシミュレーション結果 Table 4 Simulation results in the conditions of using signals in railroad crossing.. 実測データ 文献 15) のシミュレーション 本シミュレーション. 導入前 24.6 km/h 26.4 km/h 24.3 km/h. 導入後 33.7 km/h 29.2 km/h 36.1 km/h. モデルに組み込むことができる. 信号のついた道路で距離感の異なる運転者の混合 比率を変え車両を多数走行させてシミュレーションを 行った結果,表 5 のような結果を得た.なお信号条件 は青 15 秒,黄 2 秒,赤 10 秒とした.A から G の 7 つのケースを見ると,距離感が長い運転者を多く含む 場合,交通容量が少なくなることが分かる.このよう. よるシミュレーションが文献 15) で行われている.そ. に個人特性の違いが渋滞へも微妙に影響することが分. こで,実測データおよび文献 15) の結果と本モデルに. かる.. よるシミュレーション結果を表 4 に示す.ここでは, 踏切り周辺 1.3 km における通過車両の平均旅行速度. 5. お わ り に. を測定している.表 4 の結果より,本シミュレーショ. 本論文では,MITRAM におけるネットワーク構造. ンは文献 15) のシミュレーションと比べて踏切り信号. モデルを用いて,すり抜け運転や踏切り横断運転のシ. 機化の効果を実測データに近い値でよくとらえている. ミュレーションを行い,渋滞解析を行った.そしてこ. ことが分かる.. れらのシミュレーションを通じてモデルが有効に機能. 踏切り信号機化について,その効果をフィールドで. することを確認した.また運転者の個人特性を考慮し. 実測データとして得ることは一般に難しい.そこでこ. たモデルについてもその挙動を調べた.これらの結果. のようにシミュレーションによって予測することは,. より MITRAM が多様な交通状況をシミュレートでき. 渋滞解析のためにきわめて重要といえる.. ることが明らかとなった.. 4.3 運転者の個人特性を考慮した運転動作モデル. MITRAM では運転動作モデルとしてすでに基本的. 運転者は運転動作においてそれぞれ個人特性を持っ. な追従運転や自由走行運転などの下位論理のモデルが. ている.そしてその違いは平均速度や車間距離のとり. 作成されており,これに本論文で示した特殊な状況の. 方,急発進や急ブレーキといった行動に表れる.ここ. モデルを上位論理としてライブラリの形式で整えてい. では個人特性による車間距離の相違を取り上げ,これ. けば,様々なケースに対応した汎用なシミュレータと.
(8) Vol. 42. No. SIG 14(TOM 5). 自動車すり抜け運転動作などのシミュレーションと渋滞解析. して実用に供することが可能となる.今後はこのよう ないろいろなモデルの作成をさらに進めていくととも に,地図情報などから道路モデルを容易に構築できる ようにするためのツール類の整備を行う予定である. そして実際の市街地を対象として本格的なシミュレー. 97. 14) 広浜昭一:踏切信号機の設置とその運用効果,電 気学会電気鉄道研究会資料,TER-91-5, RTA-915 (1991). 15) 福田久治:道路交通と連携した踏切制御の評価シ ミュレーション,電気学会論文誌 D,Vol.118-D, No.4, pp.511–517 (1998).. ションを行い,渋滞解析を行う予定である.. (平成 13 年 2 月 16 日受付). 参 考 文 献 1) 栗本 譲:交通道路交通流解析のディジタル・シ ミュレーション・モデル,土木学会論文報告集, No.320, pp.137–148 (1982). 2) 斎藤 威:交通渋滞予測のための道路交通現象 の再現,電気学会誌,117 巻 9 号,pp.600–603 (1997). 3) 桑原雅夫:広域ネットワーク交通流シミュレー ション ,自動車技術,Vol.52, No.1, pp.28–34 (1998). 4) 堀口良太,片倉正彦,桑原雅夫:都市街路網の 交通流シミュレータ AVENUE の開発,第 13 回 交通工学研究発表論文報告集,pp.33–36 (1993). 5) 木俣 昇,高木秀彰,黒川浩嗣:ペトリネット による交通流シミュレーションの開発,土木計画 学研究・講演集,No.17, pp.177–180 (1995). 6) Morishita, S., Yamamoto, N. and Nakano, T.: 100 Traffic flow simulation system by cellular automata, AVCE, pp.561–565 (1998). 7) 猪飼國夫,本多中二,板倉直明ほか:ファジィ化 微視的モデルによる渋滞解析を目的とした道路交 通シミュレータ,シミュレーション,Vol.16, No.3, pp.199–208 (1997). 8) 猪飼國夫,本多中二:ファジィモデルに基づく市 街地での渋滞予測用微視的シミュレータ,日本ファ ジィ学会誌,Vol.11, No.2, pp.215–221 (1998). 9) 猪飼國夫,本多中二,板倉直明:道路交通シミュ レータのためのファジィ推論による自動車の運転モ デル,日本ファジィ学会誌,Vol.12, No.3, pp.425– 435 (2000). 10) 萩原 勉,猪飼國夫,本多中二,板倉直明:微 視的道路交通シミュレータにおける高度情報判断 運転モデル,数理モデル化と問題解決シンポジウ ム,pp.201–206 (2000). 11) 猪飼國夫,佐藤 章:微視的道路交通シミュレー タのためのオブジェクト指向道路モデルの構築とそ の検証,シミュレーション,Vol.18, No.3, pp.206– 215 (1999). 12) Yikai, K., Honda, N. and Satoh, A.: A fuzzy processor consisting of memory and controlling LSI, 5th IFSA World Congress, pp.789– 792 (1993). 13) 小原 誠,高橋伸夫,坂本邦宏,久保田尚:路 上駐車追い越し挙動の類型化とシミュレーション システムの開発,第 16 回交通工学研究発表会論 文報告集,pp.109–112 (1996).. (平成 13 年 4 月 25 日再受付) (平成 13 年 5 月 19 日採録) 猪飼 國夫. 1942 年生.1964 年電気通信大学 電子工学科卒業.同年電気試験所電 子計算機部(現産業技術総合研究所) に勤務.1969 年電気通信大学電波通 信学科助手.1972 年技術コンサルタ ント.1975 年(株)エム・アイ・ベンチャー代表取締 .日本ファジィ学会,電子情 役.2001 年博士(工学) 報通信学会,日本シミュレーション学会,計測自動制 御学会各会員. 石川. 亮. 1977 年生.2000 年新潟大学工学 部電気電子工学科卒業.現在,電気 通信大学大学院電気通信学研究科電 子情報学専攻博士前期課程在学中. 本多 中二. 1946 年生.1972 年電気通信大学 電波通信学専攻修士課程修了.同年 同大学電波通信学科助手.1981 年 工学博士.1985 年同電子情報学科 助教授.現在,同システム工学科教 授.日本ファジィ学会,計測自動制御学会,IEEE 各 会員. 板倉 直明. 1961 年生.1990 年慶應義塾大学 電気工学専攻博士課程修了.工学博 士.同年電気通信大学電子情報学科 助手.1993 年同講師.1996 年同助 教授.現在,同システム工学科助教 授.電子情報通信学会,日本 ME 学会,日本生理人類 学会各会員..
(9)
図



+3

関連したドキュメント
どにより異なる値をとると思われる.ところで,かっ
方法 理論的妥当性および先行研究の結果に基づいて,日常生活動作を構成する7動作領域より
ベクトル計算と解析幾何 移動,移動の加法 移動と実数との乗法 ベクトル空間の概念 平面における基底と座標系
自動運転ユニット リーダー:菅沼 直樹 准教授 市 街 地での自動 運 転が可 能な,高度な運転知能を持 つ自動 運 転自動 車を開 発
Series of numerical analysis to estimate structural frequency and modal damping were conducted for a two-dof model using the simulated external forces induced by impulse force and
テキストマイニング は,大量の構 造化されていないテキスト情報を様々な観点から
自動車や鉄道などの運輸機関は、大都市東京の
一方で、自動車や航空機などの移動体(モービルテキスタイル)の伸びは今後も拡大すると
