目次
第1 章 序論 1.1 研究背景 3 1.2 研究目的 4 第2 章 ニューラルネットワーク 2.1 ニューラルネットワークとは 5 2.2 ニューラルネットワークのモデル 6 2.3 誤差逆伝播法 7 2.4 重み更新抑制係数 12 第3 章 ARX モデルとニューラルネットワークを併用した非線形同定と制御 3.1 ARX モデル 14 3.2 ARX モデルとニューラルネットワークを併用した非線形同定 16 3.3 粘弾性材料試験機 19 3.4 粘弾性材料試験機の非線形特性 24 3.5 粘弾性材料試験機の ARX モデルによる同定 26 3.6 粘弾性材料試験機のニューラルネットと ARX モデルを併用した非線形同定 30 3.7 ニューロコントローラによる非線形制御 33 第4章 参照モデルと学習理論に基づいた位置制御法 4.1 参照モデルと学習理論に基づく位置制御法 35 4.2 シミュレーション 36 4.3 フィードバック誤差学習法との違い 37 4.4 外乱オブザーバへの応用について 39 4.5 実験結果 41 4.6 学習係数の影響について 48 4.7 参照モデルと学習理論に基づく位置制御法の AIC による評価 51 4.8 RBF ネットワークへの発展 54 第5 章 外乱オブザーバ付き参照モデルと学習理論に基づく位置制御法 5.1 外乱オブザーバ付き参照モデルと学習理論に基づく位置制御法 59 5.2 シミュレーション結果 60第6 章 まとめ 6.1 まとめ 64 6.2 今後の課題 64 参考文献 66 発表論文 68 謝辞 69
第
1 章 序論
1.1 研究背景
自然界のありとあらゆる制御対象となるものは、必ず非線形特性を有していると考えら れる。非線形特性としては、リンク機構や重力などの連続な非線形の式で表されるものや、 摩擦などの不連続な式で表されるものがある。 そのような非線形特性に対して制御の分野では、非線形同定や非線形制御という分野が ある。この非線形同定や非線形制御という分野では、いずれも最終的にはよりよい制御性 能が要求されている。具体的には、非線形特性を含む精度のよい同定モデルの導出や非線 形システムに対する制御方法の確立となる。 一 方 で 、 学 習 理 論 の 一 つ で あ る ニ ュ ー ラ ル ネ ッ ト ワ ー ク は 1943 年 に マ ッ カ ロ (W.Mc.Culloh)とピッツ(W.Pitts)が提案した非常に簡単な神経回路モデルがその研究のは じめとされ、その後、1960 年代頃にローゼンブラット(Rosenblatt)や甘利、福島らによっ て研究が進められるが、1969 年にミンスキー(Minsky)の「Perceptron」でパーセプトロンの 能力の限界が証明され、ニューラルネットワークの研究は沈滞する。しかし、1986 年、ポ ップフィールド(J.J.Hopfield)の相互結合型ネットワークやラムルハルト(D.E.Rumelhart) の誤差逆伝播法などによって、再び研究が盛んになり、現在では制御の分野でも利用され ている。また、制御の分野で利用されることが多くなった理由として、ニューラルネット ワークの関数近似能力が挙げられる。 以上のことから、ニューラルネットワーク(以下、NN)を用いた非線形同定や非線形制御 が1970 年代頃から研究をしはじめられ、アウターループや上位の制御系で用いられること が多くなったといえる。例えば、フィードバック誤差逆学習方式によるNN制御、NNを 用いた非線形システムに対するモデル規範型適応制御やNNを用いたセルフチューニング レギュレータが提案されている。 しかし、既存のニューラルネットワークを用いた構造、たとえばフィードバック誤差学 習方式等では対応しきれない制御問題もある。 従って、ニューラルネットワークを用いた制御系では、ニューラルネットワークを導入 する位置や方法等を検討することによるその制御系の構造的な工夫をする必要が生じてく ると考えられる。1.2 研究の目的
本研究では、先ほど述べたように学習理論であるニューラルネットワーク等を用いた制 御系では構造的な工夫をする必要があり、そしてその構造的工夫をすることによってニュ ーラルネットワーク等を用いた制御系を多用途に展開できると考えられるので、そのため に以下の三つの課題を考える。 第一に、学習理論を用いた新しい同定と制御構造を提案する。 第二に、その学習理論を用いた新しい同定と制御構造をシミュレーションで検証し、そ の有効性を考える。 第三に、シミュレーションで有効だとわかったら、その学習理論を用いた新しい同定と 制御構造の利用方法を考える。 そして、今回はこの上記の課題を二つの同定と制御系に対して検討する。その二つの同 定と制御の検討構造は、「ニューラルネットワークと ARX モデルを併用した非線形同定と 制御」、「参照モデルと学習理論を用いた位置制御法」についてである。以下、簡単に二つの 同定と制御系について概説する。 まず「ニューラルネットワークとARX モデルを併用した非線形同定と制御」では、ニュ ーラルネットワークとARX モデルを併用した非線形同定法で制御対象の非線形特性をニュ ーラルネットワークが学習して同定し、その他の線形部分をARX モデルが同定するという ものを考える。さらに、この同定法を制御に応用できないかということでこの同定結果を 用いた制御法を検討する。 次に、「参照モデルと学習理論を用いた位置制御法」は、実際の制御系は外乱やプラント 自体の非線性特性によって出力が乱れるが、その乱れを参照モデルとニューラルネットワ ークで補償しようというものである。さらに発展として参照モデルに外乱オブザーバを導 入することを検討する。 以上、二つの学習理論であるニューラルネットワーク等を用いた非線形同定と制御法に ついて、その構造で実際に同定、制御が可能かどうか、実際にそれらの同定、制御法を用 いた際にどのようなメリットやデメリットがあるのかを考えることが目的となる。第
2 章 学習理論
2.1 ニューラルネットワークについて
図 1 は生物の情報処理を司る脳を構成するニューロンである。ニューラルネットワーク は、図 1 のような脳神経系における情報処理の方式を人工的・工学的に模したもので、並 列分散的で自己学習的な能力をもつシステムのことである。このような情報処理のアイデ ィアをニューラルコンピューティングあるいはニューロコンピューティングと呼んでいる。 ニューラルコンピューティングの原理は非線形特性をもつニューロン素子を多数結合し た人工ニューラルネットワークを用いて並列分散的に計算をおこなえることにある。ニュ ーロコンピューティングではニューラルネットワークの結合状態や構造およびダイナミク スを、学習と呼ばれる機能に基づき問題の解を与える情報構造のシステムに適応変化させ ることが重要な手法となっている。それはニューラルネットワークに高速並列処理や分散 的な情報処理、学習能力、汎化能力など多数の重要かつ興味深い性質を持たせている。以 上のような性質によって、脳神経回路網を人工的・工学的に模した非線形特性をもつ並列 分散処理的なシステムであるニューラルネットワークはパターン認識や制御システムなど へ応用されている。 そのニューラルネットワークのモデルについて次に簡単に説明すると、脳神経系は多数 のニューロン素子が興奮性と抑制性のシナプス結合で密に結合したネットワークとしてモ デル化できる。ノードにあたるニューロン素子はその一つ一つが入力情報を別の出力に変 換する写像とみられると考えられる。また、ニューラルネットのアークにあたるシナプス 結合の情報伝達効率は、ネットワークの入出力情報の変化に伴って変化し得るような可塑 的に変化する構造が脳神経系の基本的な特徴と考えられる。一般にこのような特徴をもっ たネットワークをニューラルネットと呼んでいる。 図1:ニューロンそして、人工ニューラルネットでは情報伝達効率を単に結合重み係数と呼んでいる。また、 ニューラルネットの状態は、各ニューロンでの入出力関係の計算や各シナプスの結合の伝 達効率(結合重み係数)の変化の計算は、並列分散処理的に高速に行われる。 それから、ニューラルネットワークの学習についても簡単に説明する。学習とはシステ ムが環境からの入力に応じて自身の構造を作り変えていくことである。記憶も学習の一種 であり、何らかのきっかけが与えられると、過去の入力を再現できるようにシステムが構 造を変化させる過程である。また、環境に適応するシステムはその環境においてよりよい 動作の仕方を学習しているとみなすことができる。 学習の指針として、ある入力に対してニューラルネットが出力すべき出力が外部から与 えられる場合、これを教師信号と呼ぶ。学習はつぎのように分類できる。 (1) 教師なし学習(入力信号の性質のみに基づく学習) (2) 教師あり学習(望ましい出力が外部から教えられる学習) ニューラルネットでは、処理ユニットの状態や結合の情報伝達効率(つまり結合係数) を変化させることによって入出力関係を変えることができる。これをニューラルネットに おける学習と呼んでいる。入力に対してニューラルネットが出力すべき所望の出力が、教 師信号として外部から与えられる場合、ニューラルネットの出力を教師信号に近づけるよ うな学習を教師あり学習と呼ぶ。ニューラルネットの教師あり学習の代表例には、パーセ プトロンのHebb の法則[12]や、多層ニューラルネットワークの誤差逆伝播法[8]による学習 がある。
2.2 ニューラルネットワークのモデル
ここでは、今回用いたニューラルネットワークのモデルについて述べる。ニューラルネ ットワークのモデルにはいくつかある。主に、連続か離散か、確定的か確率的かでその構 成は違ってくる。また、近年ではリカレントニューラルネットワークやRBF ネットワーク なども研究されている。今回、用いたニューラルネットワークのモデルは基本的なものを 用いた。その内部構成は図2.1 のようになっている。 図2.1:ニューラルネットワークの内部構成図2.2:非線形関数 図2.1 をみるとわかるが、ニューラルネットワークは入力層、中間層、出力層の三相から なっており、内部に線形部分と非線形部分を内蔵している。このことから図2.2 のような非 線形関数を近似することが可能である。 ちなみに、その線形な部分と非線形な部分の数式は以下のようになっている。 線形な部分 入力-状態方程式(結合方程式): z n i i i
x
i
n
w
z
,
1
,
,
1
…(1) 非線形な部分 非線形変換関数:
のとき
のとき
0
,
0
0
,
1
)
(
z
z
z
y
…(2)2.3 誤差逆伝播法
ここでは、ニューラルネットワークの学習方法の一つである誤差逆伝播法について説明 する。 一般に、ニューラルネットワークの学習では順方向の流れとして、入力ベクトルを入力 し、中間層へ前向きに伝播させ、出力層から出力ベクトルを得る。ここで、注意として入 力ベクトルと出力ベクトルがスカラもあり得ることを述べておく。そして、学習では、あ る入力ベクトルに対して望ましい出力ベクトルが与えられる場合を教師あり学習というが、 この望ましい出力ベクトルは教師信号といい、この入出力ベクトルのペアをパターンとよ ぶことにすると、ある入力に対してネットワークから望ましい出力が得られた場合は学習 しないが、それ以外の場合は、出力された結果と教師信号との差を減らすようにネットワ ークの結合の重み係数を調整する。このようにしてニューラルネットワークはネットワー クの学習を実現させている。ここで、Rumelhart 等によって提案され、広く普及した誤差逆伝播法(Error Back Propag ation):略して BP 法について述べる。 次のような二乗誤差関数を考える …(3) pj
t
は出力層素子j
のパターンp
での教師信号、y
pjはそのときの実際の出力である。 出力y
pjはその時は重み係数
pjで決定されるので、各重み係数の軸で張られる空間内で、 pE
を高さと考えればこの二乗誤差は誤差曲面となる。任意の状態からこの誤差曲面の極 小値(最小値とは限らない)に到達させるには、最急降下法より、重み係数
pjを ji p ji pE
…(4) のように変化させればよい(
:学習係数は0 に近い正の定数)。誤差信号
pjを pj p pju
E
…(5) とすれば(
n i i ji pjy
u
1
)、合成関数の微分公式より ji pj pj p pj p pju
y
y
E
u
E
…(6) となり、
pjは誤差の出力について微分と、出力の入力総和についての微分の積に分解でき る。ここで、ニューラルネットワークの構造を確認すると、あるニューロンj
において、他 のニューロンi
からの出力y
i(i=1,…,n)に対応する重み係数
jiをかけた値の総和をu
jとす る
n i i ji pjy
u
1
…(7) ニューロン出力y
jは、入力の総和u
jに単調増加関数
を施したもので表す。
output j pj pj pt
y
E
(
)
22
1
)
(
j i ju
y
…(8) ここで、関数
として、ステップ関数を用いるとMcCulloch-Pitts のモデルとなるが、関 数
として、シグモイド関数 ue
u
1
1
)
(
…(9) を用いると、この関数は微分可能なので解析的に問題を解くことが可能になる。今回は、 ここにtanh 関数を用いている。 さて、話をもどすと、上の2 つの式より
pjの2 番目の微分は)
(
' pj pj pju
u
y
…(10) となる。しかし、一つ目の微分には場合分けがいる。 出力層の素子の場合、E
pより)
(
pj pj pj py
t
y
E
…(11) だから、 ji pj pj p pj p pju
y
y
E
u
E
…(12) に代入すると出力層に関しての)
(
)
(
pj pj ' pj pj
t
y
u
…(13) が得られる。 それ以外の場合、ふたたび合成関数の微分を用いて
k k i pi ki pk pk p pk pk pk py
y
u
E
y
u
u
E
k kj pk pu
E
k kj pk
…(14)となり、この場合の
pjは
k kj pk pj pju
'(
)
…(15) と計算できる。ここで、k
はこの素子の出力を受けている全素子を示す。 全てのパターンについての二乗誤差の総和
patterns p p netE
E
…(16) に対して
p ji p ji netE
E
…(17) であるから、全パターンでの一度ずつの重み係数の変化の総和は、
E
net
jiに比例する。 よって、以下はE
netを使用する。 実際の学習では、初めにネットワークに与えられた入力ベクトルが前向きに伝播、出力 結果が得られる。得られた結果と教師信号との差から、)
(
)
(
pj pj ' pj pj
t
y
u
…(18) を用いて、誤差信号
pjを計算し、 ji p ji pE
…(19) により、出力層の素子への重み係数の変更量が決定される。中間層の素子では、その素子 が出力を送っている一つ後ろの層の素子の式
k kj pk pj pju
'(
)
…(20) より誤差信号
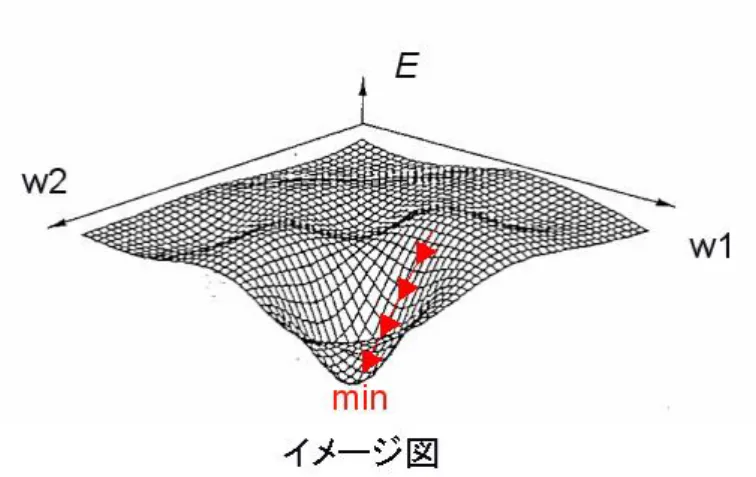
pjを求めることができる。これを再帰的に繰り返すことにより各素子の結合 の重み係数を更新することができる。この演算はネットワークを後ろ向きに伝播するので、 提案された学習方法は誤差逆伝播法と呼ばれている。 誤差逆伝播法では、全ての重み係数を同じ値にして学習を開始した場合、全ての重み係 数が同じように変化してしまう。このとき、中間層の全ての素子が同じような振舞いをし、 非対称なベクトルを持つパターンの学習はできない。これを避けるため、それぞれの重み 係数の初期値は小さい乱数で与える。図3 誤差逆伝播法のイメージ図 以上のことを図3 を用いて、図的に説明すると、簡単にいえば誤差逆伝播法は評価関数 2
2
1
y
t
E
…(21) を極小にするような重みw を求めるアルゴリズムであるから、図 3 でランダムに重みの初 期位置を決めて始まり、下の図4 のアルゴリズムを繰り返すことで最適な重みを決定する。 図4 のアルゴリズムを簡単に説明すると、ニューラルネットワークを順方向で計算した後、 その出力yと教師信号tを比較し、その誤差を逆方向にニューラルネットワークに流し、出 力誤差に対応するそれぞれの入力誤差du(=Δdu)の値を用いて重み w を更新するものであ る。 図4 誤差逆伝播法のアルゴリズムそして、学習の終了は重みの更新式からわかるが、Δdu=0 のとき
)
(
)
1
(
n
w
n
w
…(22) となるから、今の重みの値と次の計算して出てくる重みが同じになるから重みに変化がな くなり、学習が終了したことがわかる。2.4 重み変更抑制係数
ニューラルネットワークの問題として過学習がある。過学習は重みが収束する値の近傍 で振動し、発散していくことが問題だと考えられる。つまり、重みの変化が収束値近傍で 大きくなると重み自体も大きくなり、その後、収束値近傍に戻ろうと大きくまた変化する が、収束できず、その繰り返しで値がどんどん大きくなり発散してしまうと考えられる。 そこで、重みの変化を抑制すれば発散せずに収束する場合が増えると考えられる。そこ で、以下のことを考える。 ニューラルネットの出力と教師信号の差を最小化する二乗誤差関数にペナルティ関数 d eca yC
を追加し、新たなコスト関数を導入する。こうすることで、重みの変化を考慮したニ ューラルネットワークの構造変化が起こると考えられる。 さて、ペナルティ関数とコスト関数は以下のようになる。
i i decayW
C
22
1
)
(
…(23) decay net totalE
C
C
…(24) このとき、 ji p ji pE
…(25) より)
(
)
(
)
(
t
w
t
w
E
t
w
ji ji net ji
…(26) だから、更新式は)
(
)
(
)
1
(
)
1
(
t
w
E
t
w
t
w
ji net ji ji
…(27) となり、
は重み係数の過度な変更(学習したい入出力データに対する過学習)を抑制する係 数となる。そこで、
は重み変更抑制係数(Weight Decay)といえる。 したがって、従来の二乗誤差の評価関数による重みの変化は学習中に重みがどんな値をとったとしてもよかったが、このコスト関数では二乗誤差が小さくなることと重みの変化 ができるだけ小さくなる両方を考慮した学習となる。
第
3章 ニューラルネットワークと
ARX モデルを併用した非線形同定と制御
3.1 ARX モデル
まず、ARX モデルについて説明する。ARX モデルは式誤差モデルの一つである。式誤差 モデルとは、差分方程式)
(
)
1
(
)
(
k
a
1y
k
a
nay
k
n
ay
)
(
)
(
)
1
(
1u
k
b
u
k
n
e
k
b
nb
b
…(28) で表されるものである。ただし、u
は入力、y
は出力、a
、b
はパラメータである。また、)
(k
e
は外乱項で、差分方程式に直接、誤差として入っている。この式誤差モデルにおいて、 ARX モデルは外乱項e
(k
)
を白色雑音w
(k
)
と仮定したものである。すなわち、)
(
)
1
(
)
(
k
a
1y
k
a
nay
k
n
ay
)
(
)
(
)
1
(
1u
k
b
u
k
n
w
k
b
nb
b
…(29) と表される。 ここで、ARX モデルの離散時間 LTI システムの一般的な表現とその 1 段予測誤差につい て述べる。 まず、離散時間LTI システムとしては一般的に)
(
)
(
)
(
)
(
)
(
k
G
q
u
k
H
q
w
k
y
…(30) と表される。ここで、u
(k
)
は入力、y
(k
)
は出力、G
(q
)
は伝達関数、H
(q
)
は雑音モデル、)
(k
w
は白色雑音である。また、離散時間LTI システムの 1 段予測誤差は、上式で定義した 離散時間LTI モデルにおいて、時刻(
k
1
)
までに測定された入出力データに基づいた出力)
(k
y
の1 段予測誤差y
ˆ
(
k
|
)
として)
(
)
,
(
)
,
(
)
(
)]
,
(
1
[
)
|
(
ˆ
k
H
q
y
k
H
q
G
q
u
k
y
q
q
…(31) と与えられる。ただし、
はモデルを記述するパラメータから構成されるベクトルである。 以上のことから、ARX モデルの離散時間 LTI システムは、パラメータベクトルを]
,
,
,
,
,
[
a
1
a
nab
1
b
nb
…(32) とし、データベクトル(回帰ベクトル)を T b au
k
u
k
n
n
k
y
k
y
k
)
[
(
1
),
,
(
),
(
1
),
,
(
)]
(
…(33) と定義すれば、ARX モデルの出力y
(k
)
は)
(
)
(
)
(
k
k
w
k
y
T
…(34) となり、次式で定義される既約なシフトオペレータq
)
1
(
)
(
1
k
u
k
u
q
…(35) を用いた二つの多項式 na naq
a
q
a
q
A
1
11
)
(
…(36) nb nbq
b
q
b
q
B
1
1)
(
…(37) を用いて)
(
)
(
)
(
)
(
)
(
q
y
k
B
q
u
k
w
k
A
…(38) と書き直された後、伝達関数G
(q
)
と雑音モデルH
(q
)
を)
(
)
(
)
(
q
A
q
B
q
G
,)
(
1
)
(
q
A
q
H
…(39) とおくことで、ARX モデルの離散時間 LTI システムは)
(
)
(
1
)
(
)
(
)
(
)
(
w
k
q
A
k
u
q
A
q
B
k
y
…(40) とかけ、(
na
nb
)
個のパラメータを表現したパラメトリックモデルとなる。 さらに、ARX モデルの 1 段予測誤差は)
(
)
(
)
(
)
(
)]
(
1
[
)
|
(
k
A
q
y
k
B
q
u
k
k
y
T
…(41) と表され、この式からわかるようにARX モデルでは 1 段予測誤差は
に関して線形な関係 式となる。このことからARX モデルは線形回帰モデルといわれ、ARX モデルは線形なモ デルといえる。 また、図5 に ARX モデルのブロック線図を示しておく。 図5:ARX モデルのブロック線図3.2 ニューラルネットワークと
ARX モデルを併用した非線形同定
ニューラルネットワークとARX モデルを併用した非線形同定について説明する。このモ デルはニューラルネットワークによる制御対象の順モデル同定を基にしている。ニューラ ルネットワークによる制御対象の順モデル同定とは、制御対象と同一の入力信号を受け、 その出力が制御対象の出力と同一になるように、ニューラルネットワークがその内部構造 を変化させていく同定法である。このモデル図は図6 のようになっている。 この構造では、先程述べたように対象とするシステムと同一の入出力特性を表現するよ うにニューラルネットワークが学習する。そのために、ニューラルネットワークは誤差逆 伝播法で、評価関数E をニューラルネットの出力をy
、実際の制御対象の出力をy
とした ときに 22
1
y
y
E
…(42) として、この評価関数Eを極小にするように学習していく。すなわち、評価関数Eが0 に 近い値になるように学習していくので、ニューラルネットの出力y
と実際の制御対象の出 力y
が同じ値になっていくことになる。そして、このニューラルネットワークによる制御 対象の順モデル同定は制御対象が非線形な特性を有しているときもニューラルネットワー クが任意の非線形関数の近似が可能であることからその場合には特に用いられていること が多い。 さて、ここで本題のニューラルネットワークとARX モデルを併用した非線形同定につい ての説明に戻る。そこで、先程述べたARX モデルの特徴を再確認すると、ARX モデルの 1 段予測誤差は)
(
)
(
)
(
)
(
)]
(
1
[
)
|
(
k
A
q
y
k
B
q
u
k
k
y
T
…(43) と表されることから、ARX モデルは上記のように
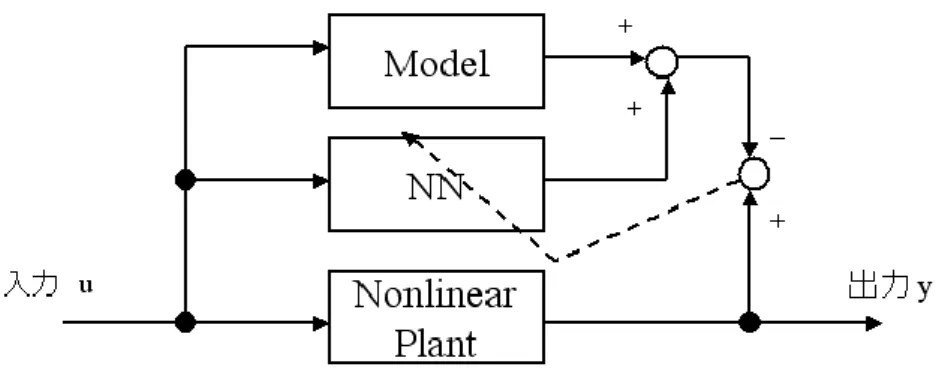
に関して線形な関係式となり、ARX モ デルは線形なモデルであるといえる。 図6:ニューラルネットワークによる制御対象の順モデル同定のモデル図図7:ニューラルネットワークと ARX モデルを併用した非線形同定のブロック図 以上の「ニューラルネットワークによる制御対象の順モデル同定」と「ARX モデルが線 形なモデルであること」をあわせて考えると、これらを制御対象にブロック線図で並列に 加えることによって、ARX モデルが制御対象の線形な部分を同定し、ニューラルネットワ ークが制御対象の非線形な部分を同定することで、制御対象の非線形な部分も含めた同定 を高速にできると考えられる。図7にそのブロック線図を示す。 さて、以上のことからニューラルネットワークと ARX モデルを併用した非線形同定は Model として ARX モデルを用いて非線形な制御対象の線形な部分を同定し、ニューラルネ ットワークは非線形な制御対象の非線形な部分を同定する方法となる。さらに、先に述べ たニューラルネットワークによる制御対象の順モデル同定と比べると、ARX モデルの同定 する線形な部分がニューラルネットワークで学習する必要がない分、ニューラルネットワ ークとARX モデルを併用した非線形同定のほうが高速に同定できるといえる。また、非線 形な部分のみをニューラルネットワークが学習するので、その重みに非線形特性の情報が 蓄積されると考えられる。このことから重みと物理現象の関係が明らかになり、原因とな る物理現象ごとに重みを対応させることができるのならば、このモデルの利用用途は広が ると考えられる。しかし、現状ではそれが実現していないために、ノイズまで同定してし まうと考えられる。 さて、ここで、そのシミュレーション結果を示す。シミュレーション条件は表 1 のよう に設定した。 表1:シミュレーション条件 制御対象(モデル)
5
5
s
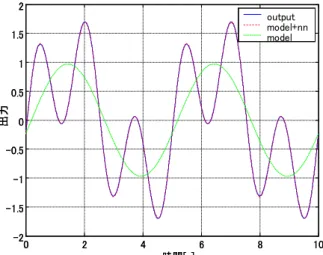
サンプリング時間 0.005[s] 入力 sin 波 非線形特性もしくは外乱 入力sin 波の高調波 学習係数 α=0.08 β=0.000001 重みの数 40図8:ニューラルネットワークと ARX モデルを併用した非線形同定のシミュレーション結果 ここで、ニューラルネットワークの学習係数や重みの数は試行錯誤を繰り返すことで今 回は決定した。また、入力でsin 波を用いたのは応用で粘弾性材料試験機を用いることを考 慮したためである。非線形特性及び外乱も同様に考えて設定した。さて、シミュレーショ ン結果が図8 のようになる。図 8 の結果からわかることは、実際の出力の青線の実践が線 形モデルの同定の出力の緑線の破線よりも線形モデルとニューラルネットワークを併用し た同定の出力の赤線の鎖線によりフィッティングしているので、線形モデルのみで同定す るより線形モデルとニューラルネットワークを併用した同定の方がより精度よく同定して いると考えられる。 一方で、このニューラルネットワークとARX モデルを併用した非線形同定では、ニュー ラルネットワークには制御対象の非線形特性のみを同定していて欲しいから、ニューラル ネットワークの出力とシミュレーションで非線形特性もしくは外乱として仮定した入力 sin 波の高調波が一致していて欲しい。つまり、ニューラルネットワークによって非線形制 御対象の非線形特性が推定できるはずである。その結果を示した図が図9 になる。 図9:非線形特性の推定 0 2 4 6 8 10 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 時間[s] 出力 output model+nn model 0 2 4 6 8 10 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 時間[s] 出力 output model+nn model
さて、図 9 の結果をみると、ニューラルネットワークの出力とシミュレーションで非線 形特性もしくは外乱として仮定した入力 sin 波の高調波が一致していることから非線形特 性を推定していることがわかる。
3.3 粘弾性材料試験機
さて、先程まで説明していたニューラルネットワークとARX モデルを併用した非線形同 定を粘弾性材料試験機に適用する。そこで、ここでは適用する粘弾性材料試験機について 説明する。説明する手順として、この粘弾性材料試験機の特徴の一つであるアクチュエー タについて説明した後に、装置全体の構成について述べたい。3.3.1 粘弾性材料試験機のアクチュエータについて
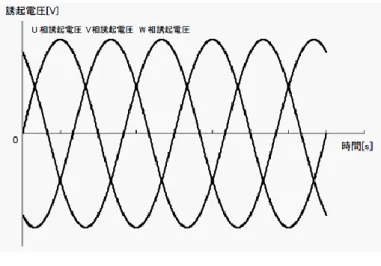
粘弾性材料試験機では、動的な力の精密な印加計測のために入力波形を任意の波形の力 が正確に発生でき、かつ摩擦力を生じにくい動力源が必要である。そこで、リニア駆動可 能な動力源としてシャフトモータをこの粘弾性材料試験機は使用している。このモータは、 永久磁石を内蔵したシャフトと三相から成るムービングコイルを内蔵したスライダで構成 している。図 10 にシャフトモータの構造を図 11 に動作原理である三相の誘起電圧の波形を 示す。 図 10:シャフトモータの構造図 11:三相誘起電圧 図 10 と図 11 からわかるように、シャフト部は円柱形の高性能マグネットが並べられてい て、外周はステンレスで覆われており、スライダには位相を 120°ずらしたコイルが内蔵さ れている。これに電流を流すとコイルは磁界から力を受け、推力を発生する。 したがって、主な特長としては、N極同士、S極同士を接合してあるため強力な磁束が 360°全方向にむだなく発生しているため効率が高く、短いコイル長で大きな推力が得られ る。また、シャフトとスライダ間にはエアギャップがあり、非接触での駆動が可能なため バックラッシは存在しないと考えられる。さらに、摩擦が生じないため、騒音、粉塵、熱 膨張による誤差が発生せずメンテナンスフリーである。それから、外周部に鉄ではなくス テンレスを使用しているので、シャフト―スライダ間に吸着力が生じないためコギングが なく、高い位置決め分解能を実現している。 そして、今回用いたシャフトモータはシャフト径 16 mm、可動ストローク 100 mm である。 図 12 にモータの外観を、表にシャフトモータの主な仕様を示す。 図 12:シャフトモータ外観
表 2 シャフトモータ仕様 最大推力 6,000 [N] 最長ストローク 3 [m] 最高速度 6.3 [m/sec] 最低速度 8 [μm/sec] 最大加速度 20 [G] 速度むら 0.05% 最高分解能 0.14 [nm] 使用環境 真空 10-5 [Pa]・水中可 粘弾性材料試験装置に組み込んだ場合 定格推力 10 [N] 加速(最大)推力 39 [N] 定格電流 0.6 [A] 最大電圧 10 [V] ストローク 100 [mm] スライダ質量 150.0 [g] 以上のことから、このシャフトモータを用いることで、可動子が固定子と非接触で駆動 するため、摩擦力が発生しない。このことは、ニューラルネットワークとARX モデルを併 用した非線形同定を行う上で、ノイズまで同定してしまうこの方法のデメリットを抑制す る働きがあると考えられる。
3.3.2 粘弾性材料試験機の装置全体の構成について
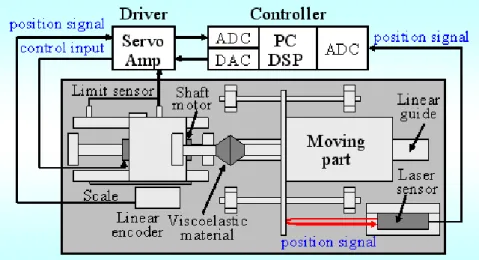
次に粘弾性材料試験機の構成について述べる。この粘弾性材料試験機では、リニアモー タを用いた動的材料試験機の開発を目的としているため、可動質量部の支持には、空気圧 による浮上の代わりにボールベアリングにより摩擦を抑制したガイドレールを用いている。 ここで、試験機の全体的なシステム構成図を図 13 に、実際の試験機の外観を図 14 に示す。図 13:試験装置のシステム構成 図 14:試験装置外観 さて、以下では装置の主な構成を説明する。以下に示すように、シャフトモータの可動 子を固定した上面プレートがリニアガイドに支持され、モータの側壁上を低摩擦力でスラ イドできるようになっている。そして、このプレートに接続されているシャフトが粘弾性 材料に力Frefを印加する。また、粘弾性材料の他端にも同様にシャフトが接続されており、 このシャフトから可動質量に材料からの出力Fmaterialを伝える。それから、可動質量はスラ イドガイドのレール上で一軸方向に低摩擦でスライドできるようになっており、可動質量 にはアルミ合金(体積:10.0×15.0×11.2=1680 [cm3 ])を使用し、その質量は 4502.4g(密度: 2.68 g/cm3)である。 モータを支持する上面プレートの片側面にはリニアエンコーダのリードヘッドが取り付 けられ、モータの側壁面上にリニアスケールを張り付けることにより、モータの変位が検
出可能となる。また上面プレートのもう一方の側面にはリミットセンサの遮光板が取り付 けられ、同側壁面に駆動範囲を制限するマイクロフォトセンサを設置することにより、シ ャフトモータの可動範囲の制限を行っている。フォトセンサに上面プレートの遮光板が入 ると、サーボアンプに接続された駆動禁止回路が通電し、モータへの指令リミット値が 0 となり、モータを強制的に駆動禁止とする構成となっている。 また、シャフトモータとリニアエンコーダのケーブルは、モータのスライド運動の際、 装置全体へ摩擦等の外力的影響を及ぼす可能性があるので、ケーブルキャリアに収納する ことにより、外力を極力及ぼすことなくスライドさせるよう設計されている。 以上が今回作成した試験機の構成である。 図 15:試験装置の主要構成1 図 16:試験装置の主要構成 2
以上のことから、装置全体の構成にしてもニューラルネットワークとARX モデルを併用 した非線形同定を行う上で、ノイズまで同定してしまうデメリットを抑制するように、摩 擦の影響を小さくなるように構成されている。
3.4 粘弾性材料試験機の非線形特性
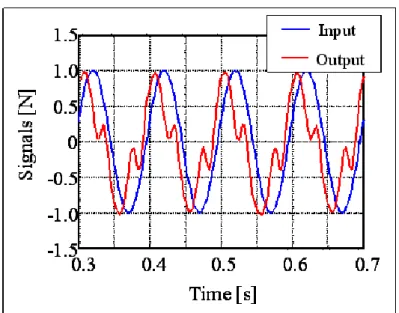
今回用いた粘弾性材料試験機は粘弾性材料に起因する非線形特性を有している。そのこ とを確認するために、入力信号を正弦波としてオープンループで粘弾性材料を加振し、応 答としてシャフトモータの変位を計測して、その特性を解析することにより材料の非線形 性を検証した。そのときの実験条件を表 3 に示す。 また、入力は周波数 10 Hz、振幅 1 N の正弦波を印加すると、出力はセンサから得られる 可動質量の位置であるが、これを2回微分し力信号とした。そして、サンプリング時間は 5 ms で行った。実験のブロック図を図 17 に示す。 さて、実験の結果の入出力信号の一部を図18 に示す。出力波形は入力波形と比較すると、 位相の遅れだけでなく波形そのものの形状が単一周波数の正弦波と異なり、高調波が見ら れ、強い非線形性を示す特性が確認できる。 表 3:実験条件 入力信号 正弦波信号 入力指令 力指令 出力 位置 [mm] 周波数 10 [Hz] 振幅 1 [V] 推力 3.9 [N] データ数 10 周期分 サンプリング周波数 500[Hz] サンプリング時間 5 [ms] 図 17:正弦波加振実験ブロック図図 18:正弦波加振実験の入出力信号 そして、この非線形特性を詳しく解析するために出力信号を FFT 解析することにより、パ ワースペクトルを求めた。本実験でのサンプリング周波数は 500 Hz であるから、標本化定 理より、その 2 分の 1 である 250 Hz を境に、高周波側に折り返し雑音が生じるので、250 Hz 以下の周波数における解析結果を考察する。この FFT 解析結果を以下に示す。印加周波数 10 Hz において最も大きなゲインが現れているのが確認できる。これは、システムが 1 自由 度のばねマスシステムのように振舞っているためである。また、ピークは以後 10 Hz 毎に表 れており、相対的に奇数次の要素が大きいことがわかる。これは粘弾性材料の非線形な特 性により起因するものであり、対象の弾性変形によるものではないことがわかる。 図 19:出力波形の FFT 解析結果
表 4:正弦波加振実験の出力波形の FFT 解析結果 また、各ピークでのパワースペクトルの強度と位相を表4に示す。 ここで、本実験で高調波成分として大きなゲインが現れたのは 70 Hz までであることを配 慮し、上記の図、表とも 100 Hz までの成分を表示していることを述べておく。 さて、以上のことから、この粘弾性材料試験機は粘弾性材料に起因する非線形特性を有 していることが確認でき、ニューラルネットワークとARX モデルを併用した非線形同定を この材料試験機に適用した際に、このような粘弾性材料に起因する非線形特性をニューラ ルネットワークの出力から確認できれば、ニューラルネットワークとARX モデルを併用し た非線形同定の有効性が確認できる。
3.5 粘弾性材料試験機の ARX モデルによる同定
さて、ここでは粘弾性材料試験機にニューラルネットワークとARX モデルを併用した非 線形同定を適用したいので、粘弾性材料試験機をARX モデルで同定する。はじめに同定用 の入出力データについて説明する。 まず、同定入力についてである。同定入力は同定精度に大きく影響するため、その選定 作業は慎重に行わなければならない。同定入力を選定する場合、その周波数特性と振幅特 性を考慮しなければならないため、入力信号は対象のもつすべてのモードを励起しなけれ ばならない。つまり、入力信号が多数の周波数成分を含んでいる必要がある。その多数の 周波数成分を含む入力信号の理想的なものが白色雑音である。しかし、一般的には理想的 な白色雑音は物理的に実現が不可能である(無限大のパワーをもつ信号を生成することは できない)ので、実際には有限な次元をもつ信号を利用する。今回は矩形波を利用する。 ここで、矩形波のフーリエ級数展開が
0)
1
2
sin(
1
2
1
4
kt
k
k
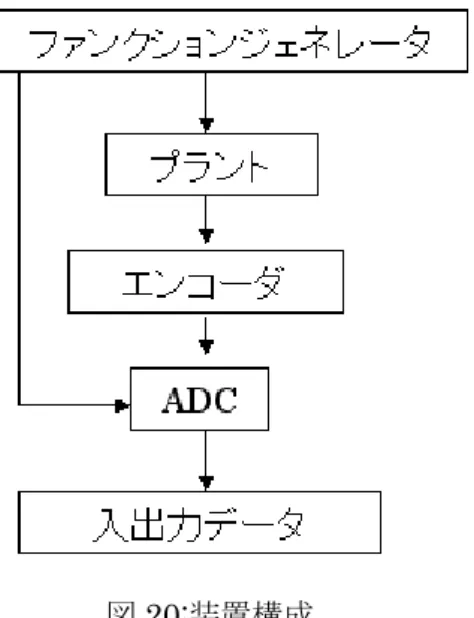
…(44) と表されるが、このことから矩形波はすべての周波数を含んではいないが、非常に多くの 奇数の周波数成分は有していると考えられるため、PE 性を満たし、同定に用いることは可 能であると考えられる。 また、諸事情により今回用いる入出力データは図20 の装置構成でそのデータを取得した。10
72
7
272
247
138
37
337
298
338
Phase [deg]
0.2
1.1
2.4
14.0
1.9
48.6
6.3
125.0
15.2
362.7
Magnitude
100
90
80
70
60
50
40
30
20
10
Frequency [Hz]
10
72
7
272
247
138
37
337
298
338
Phase [deg]
0.2
1.1
2.4
14.0
1.9
48.6
6.3
125.0
15.2
362.7
Magnitude
100
90
80
70
60
50
40
30
20
10
Frequency [Hz]
図20:装置構成 この装置構成でよいところは入出力のデータが同期しているところである。また、今回、 同定のために入出力データを取ったが、指令値として±1V で 1 周期が 0.25s でそのデータ を取得した。その結果が図21 である。 さて、図21 の入出力データを用いて同定するが、同定する方法はクロスヴァリエーショ ンを用いた。さらに、同定するにあたり同定用データの入出力コヒーレンスも調べた。そ の結果が図22 である。 図21:同定に用いる入出力データ 0 1 2 3 4 5 6 7 8 9 -2 -1 0 1 2 3 4 5 6 7 時間[s] 出力 input output 0 1 2 3 4 5 6 7 8 9 -2 -1 0 1 2 3 4 5 6 7 時間[s] 出力 input output
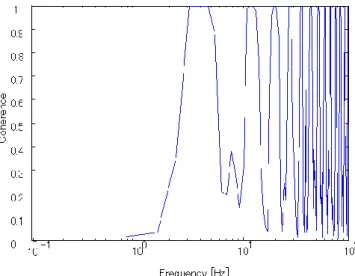
図22:同定用データの入出力コヒーレンス この入出力コヒーレンスは 1 に近いほど、その同定結果に信頼性があるといえる。この結 果は、矩形波のフーリエ級数展開からも考えられるように、入出力コヒーレンスが高いと ころと低いところが交互に表れているが、全体的には入出力コヒーレンスが 1 に近いとこ ろが使いたい制御帯域に均等に分布しているので、ある程度の同定結果の信頼性があると 考えられる。 さて、実際にクロスヴァリエーションで同定した30 次の連続系の結果のゲイン特性と位 相特性のボード図が図23 のようになった。 図23: 30 次の連続系の同定結果
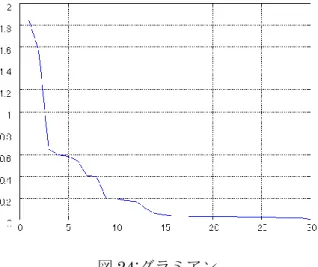
図24:グラミアン ここで、30 次では制御に用いる際、計算量が大きくなる等のデメリットがあるため、平衡 実現による低次元化を行う。モデルの平衡実現による低次元化はグラミアンを用いておこ なう。ここで、グラミアンとはその大きさで状態がシステム応答にどれだけ寄与するかの 尺度を示しているものである。視覚的にわかりやすくするため、グラフ化すると図 24 のよ うになる。 さて、このグラミアンの中の小さい要素の状態を削除することにより低次元化が図れる ので、図 24 をみると 4 次の項以降の値が小さいため、4 次以降の要素を削除し 3 次に低次 元化を行った。その結果、得られた同定モデルの伝達関数は
0307
.
145
2782
.
106
04585
.
6
7094
.
269
9380
.
42
7912
.
10
0188
.
0
)
(
3 2 2 3
s
s
s
s
s
s
s
P
…(45) となり、そのボード図は図25 のようになる。この低次元化したモデルのボード図は低次元 化する前の30 次のボード図に形が似ているので妥当性があると考えられる。 図25:低次元化したモデルの伝達関数図26:出力比較図 そこで、同一入力をモデルとプラントに入力した場合の出力を比較する。図26 からもわか るように、同一入力に対するモデルの出力とプラントからの出力がほとんど一致している ので、同定できていると考えられる。
3.6 粘弾性材料試験機のニューラルネットワークと
ARX モデルを併用した非線形同定
さて、ここまでニューラルネットワークとARX モデルを併用した非線形同定と粘弾性材 料試験機について述べてきたが、それは粘弾性材料試験機の粘弾性材料による非線形特性 が10Hz の sin 波を入力したときに、高周波として確認されているため、このニューラルネ ットワークとARX モデルを併用した非線形同定を粘弾性材料試験機に適用したときに、ニ ューラルネットワークの出力からそのような高周波が確認できれば、このニューラルネッ トワークとARX モデルを併用した非線形同定の有効性が確認できるからである。 そこで、ここでは粘弾性材料試験機にニューラルネットワークとARX モデルを併用した 非線形同定をオフラインで適用して、その有効性を確認する。 まず、用いるブロック線図は図27 である。また、同定に用いる入出力データは 10Hz の sin 波の入出力データで図 28 である。 0 1 2 3 4 5 6 7 8 9 -1.5 -1 -0.5 0 0.5 1 1.5 時間[s] 出力 arx output 0 1 2 3 4 5 6 7 8 9 -1.5 -1 -0.5 0 0.5 1 1.5 時間[s] 出力 arx output図27:ニューラルネットワークと ARX モデルを併用した非線形同定のブロック線図 図28:10Hz の sin 波の入出力データ また、用いるARX モデルは前の節で説明した
0307
.
145
2782
.
106
04585
.
6
7094
.
269
9380
.
42
7912
.
10
0188
.
0
)
(
3 2 2 3
s
s
s
s
s
s
s
P
…(46) を用いた。 さて、同定した結果が図29 である。 図29:ニューラルネットワークと ARX モデルを併用した非線形同定による結果 0 0.2 0.4 0.6 0.8 1 -0.2 -0.1 0 0.1 0.2 0.3 時間[s] O u tp u t ARX output ARX+NN 0 0.2 0.4 0.6 0.8 1 -0.2 -0.1 0 0.1 0.2 0.3 時間[s] O u tp u t ARX output ARX+NN 0 0.2 0.4 0.6 0.8 1 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 時間[s] 入力 と 出 力 input output 0 0.2 0.4 0.6 0.8 1 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 時間[s] 入力 と 出 力 input output図29 をみると、ARX モデルのみの出力の赤の鎖線よりもニューラルネットワークと ARX モデルを併用した青の実線の方が実際の出力の緑の破線に近いことがわかる。つまり、ARX モデルのみで同定するよりもニューラルネットワークとARX モデルを併用して同定するほ うが精度よく同定していることがわかる。 また、この結果をFFT 解析してみると、ARX モデルのみの結果の FFT 解析結果は図 30 となり、基本周波数10Hz は出力しているが、その高調波は出力しているようにみえない。 つまり、線形なモデルあることがわかる。 一方で、ニューラルネットワークとARX モデルを併用して同定するほうでは、ニューラ ルネットワークの出力をFFT 解析すると図 31 となり、粘弾性材料試験機の粘弾性材料に よる非線形特性による高調波成分を学習し、出力していることがわかる。したがって、ニ ューラルネットワークとARX モデルを併用した非線形同定は、ARX モデルで制御対象の 線形な部分を制御対象の非線形な部分をニューラルネットワークが学習し、同定している ことが確認できた。つまり、ニューラルネットワークとARX モデルを併用した非線形同定 は有効性があることがわかった。 図30:ARX モデルのみの結果の FFT 解析結果 図31:ニューラルネットワークの出力の FFT 解析 -10 0 10 20 30 40 50 60 70 0 0.2 0.4 0.6 0.8 1 Frequency (Hz) P o w er (/bf Periodogram/yhat) -10 0 10 20 30 40 50 60 70 0 0.2 0.4 0.6 0.8 1 Frequency (Hz) P o w er (/bf Periodogram/yhat) -10 0 10 20 30 40 50 60 70 0 0.2 0.4 0.6 0.8 1 Frequency (Hz) P o w er (/bf Periodogram/yhat) 0 10 20 30 40 50 60 70 80 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 Frequency (Hz) P o w er (/bf Periodogram/Noutdata) 0 10 20 30 40 50 60 70 80 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 Frequency (Hz) P o w er (/bf Periodogram/Noutdata) 0 10 20 30 40 50 60 70 80 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 Frequency (Hz) P o w er (/bf Periodogram/Noutdata)
3.7 ニューロコントローラによる非線形制御
先で提案したニューラルネットワークとARX モデルを併用した非線形同定に対して、さ らにその構造を制御に使えないのかということでこの制御系を考えた。そのブロック線図 は図32 のようになる。 まず、model と plant とニューラルネット 2 で構成される部分は先に提案したニューラ ルネットワークとARX モデルを併用した非線形同定をする部分である。そしてニューラル ネットワーク 1 で自動的にコントローラを生成する。なぜ自動的にニューラルネットワー ク1 がコントローラを生成するのかというと、同定出力と入力uが同じになるようにニュ ーラルネットワークがその構造を変化させ、制御対象へ制御入力を出すからである。 この構造の特徴としては、制御対象をモデルとニューラルネットワーク 2 で精度良く同 定できればできるほど、よいコントローラをニューラルネットワーク 1 で生成できること が挙げられる。一方で、ニューラルネットワークを2 つ利用するが、その 2 つの役割であ る同定とコントローラ生成は関連があり、その調整するパラメータを決定することが難し い。 図32:ニューラルネットワークと ARX モデルを併用した非線形制御 表5:シミュレーション条件 制御対象5
5
s
サンプリング時間 0.005 [s] 入力 sin 波 外乱及び非線形特性 入力sin 波の高周波 学習係数(NN1) α= 0.08 β= 0.000001 学習係数(NN2) α= 0.002 β= 0.00005 重みの数(NN1) 40 重みの数(NN2) 20図33:ニューラルネットワークと ARX モデルを併用した非線形制御のシミュレーション結果 さて、この構造で実際に制御が出来るのかを確かめるために、シミュレーション条件を 表 5 のようにして、シミュレーションをしてみた。そして、シミュレーションした結果が 図33 となった。図 33 をみると、制御していない結果の赤線の破線に対して、制御した結 果の緑線の実践が参照値の青線の鎖線に近いことから外乱もしくは非線形特性を抑制し、 目標値に追従していることがわかる。 0 2 4 6 8 10 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 時間[s] 出力 without control reference with control 0 2 4 6 8 10 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 時間[s] 出力 without control reference with control
第
4章 参照モデルと学習理論に
基づく位置制御法
4.1 参照モデルと学習理論に基づく位置制御法
参照モデルと学習理論に基づく位置制御法について説明したい。この参照モデルと学習 理論に基づく位置制御法のブロック線図は図34 のようになる。ここで、学習理論としては ニューラルネットワークを用いている。 まず参照モデルについて説明する。今回は、外乱や非線形特性が含まれていないコント ローラと制御対象からなるフィードバックの制御系を参照モデルとする。 この参照モデルの参照制御入力usと外乱が入っている実際の制御系の制御入力uが同じ になるようにニューラルネットワークから出力が出される。そうすると、制御入力 u と参 照制御入力usが同一になってくるので、実際の制御系の出力yと参照モデルの参照出力ys も同一になってくると考えられる。つまり、外乱もしくは非線形特性dと逆位相の出力が ニューラルネットワークから出されると考えられる。 このことについてニューラルネットワークの構造から考えると、ニューラルネットワー クの学習に誤差逆伝播法を用いるが、その評価関数Eは 22
1
su
u
E
…(47) となり、この評価関数E が極小になるようにニューラルネットワークは内部構造を変化さ せる。つまり、評価関数Eが0 に近くなっていくので、実際の制御入力uと参照モデルの 参照制御入力usが一致してくると考えられる。 図34:参照モデルと学習理論に基づく位置制御法のブロック線図C
C
+ - +r
P
nP
n - + + + -d
u
cu
s sy
y
u
Nu
+e
e
s Reference ModelNN
C
P
C
C
+ - +r
P
nP
n - + + + -d
u
cu
s sy
sy
y
u
Nu
+e
e
s Reference ModelNN
C
P
また、実際の制御入力uと参照モデルの参照制御入力usが一致していないのは外乱もしく は非線形特性dが実際の制御系にあるからであるが、フィードフォワードではニューラル ネットワークの出力による実際の制御入力 u への影響はないので、うまくこの構造で動く かはわからない。しかし、今回はフィードバック構造を用いているので、ニューラルネッ トワークの出力が実際の制御入力 u に影響を与えている。つまり、ニューラルネットワー クの評価関数Eが制御入力uの関数なので影響をうけ、その値を極小値に変えていくと考 えられる。したがって、ニューラルネットワークの出力が外乱もしくは非線形特性の抑制 に影響すると考えられる。
4.2 シミュレーション
先程示した参照モデルと学習理論に基づいた位置制御法のシミュレーションを行った。 シミュレーションの対象としては本研究室にある精密ステージの伝達関数を用いた。シミ ュレーション条件は表1 のようにした。 表6:シミュレーション条件 制御対象)
215
(
1365
s
s
指令 ±1[mm] コントローラs
s
5
.
0
1
10
外乱 -5[V] サンプリング時間 0.5 [ms] 学習係数 α=0.0012 β=1×10-59
9.1
9.2
9.3
9.4
9.5
-1
-0.5
0
0.5
1
Time[s]
Outpu
t y
,y
s y with NN (1) ys (2) y without NN (3)9
9.1
9.2
9.3
9.4
9.5
-1
-0.5
0
0.5
1
Time[s]
Outpu
t y
,y
s y with NN (1) ys (2) y without NN (3) y with NN (1) ys (2) y without NN (3)9
9.1
9.2
9.3
9.4
9.5
-1
-0.5
0
0.5
1
Time[s]
Outpu
t y
,y
s y with NN (1) ys (2) y without NN (3)9
9.1
9.2
9.3
9.4
9.5
-1
-0.5
0
0.5
1
Time[s]
Outpu
t y
,y
s y with NN (1) ys (2) y without NN (3) y with NN (1) ys (2) y without NN (3)図35:参照モデルと学習理論に基づく位置制御法のシミュレーション結果 このとき、ニューラルネットワークの学習係数と重みの数はシミュレーションを繰り返 して、試行錯誤で今回は決定した。指令値としては±1[mm]を繰り返すステップ信号を用 いた。外乱も繰り返し入力されるステップ外乱を用いている。 さて、そのシミュレーション結果をみる。青線は今回提案した参照モデルと学習理論に 基づく位置制御法の出力と制御入力のシミュレーション結果である。赤線は参照モデルの 出力と制御入力のシミュレーション結果である。さらに、緑線はニューラルネットワーク を利用していないPID 制御の結果である。赤丸のところをみると外乱を抑制していること がみてとれる。そして、青丸から応答が改善していることもみてとれる。 以上の結果から参照モデルと学習理論に基づく位置制御法は外乱の影響を改善すること と参照モデルの制御入力usにucに近づくので制御入力飽和問題を改善することがわかる。
![表 2 シャフトモータ仕様 最大推力 6,000 [N] 最長ストローク 3 [m] 最高速度 6.3 [m/sec] 最低速度 8 [μm/sec] 最大加速度 20 [G] 速度むら 0.05% 最高分解能 0.14 [nm] 使用環境 真空 10 -5 [Pa]・水中可 粘弾性材料試験装置に組み込んだ場合 定格推力 10 [N] 加速(最大)推力 39 [N] 定格電流 0.6 [A] 最大電圧 10 [V] ストローク 100 [mm]](https://thumb-ap.123doks.com/thumbv2/123deta/6324814.1097799/22.892.285.610.149.604/シャフトモータ仕様ストローク最大加最高分組み込んストローク.webp)