博 士 学 位 論 文
デジタル技術を応用した
プラスチック短下肢装具設計システムの構築
近 畿 大 学 大 学 院
生物理工学研究科 生体システム工学専攻
森
岡
大
輔
博 士 学 位 論 文
デジタル技術を応用した
プラスチック短下肢装具設計システムの構築
2019 年 01 月 24 日近 畿 大 学 大 学 院
生物理工学研究科 生体システム工学専攻
森
岡
大
輔
i 目次 第1章 序 論 ... 1 1.1 研究背景 ... 1 1.2 各章の概要 ... 5 第2章 力学分析 −立脚相− ... 6 2.1 緒言 ... 6 2.2 プラスチック短下肢装具 ... 7 2.2.1 プラスチック短下肢装具の材料 ... 7 2.2.2 プラスチック短下肢装具の製作方法 ... 12 2.2.3 現状の問題点と設計システムの提案 ... 16 2.3 実験装置 ... 19 2.3.1 実験用 Plastic AFO ... 19 2.3.2 歩行路 ... 27 2.3.3 LabVIEW ... 28 2.4 実験条件 ... 29 2.4.1 被験者 ... 29 2.4.2 条件 ... 31 2.5 実験方法 ... 31 2.6 実験結果 ... 31 2.7 考察 ... 43 2.8 結言 ... 45 第3章 力学分析 −遊脚相− ... 46 3.1 緒言 ... 46 3.2 実験装置 ... 47 3.2.1 実験用 Plastic AFO ... 47 3.2.2 歩行路 ... 57 3.3 予備実験 ... 57 3.4 実験条件 ... 58 3.4.1 被験者 ... 58 3.4.2 条件 ... 59 3.5 実験方法 ... 59 3.6 実験結果 ... 60 3.7 考察 ... 71 3.8 結言 ... 72 第4章 力学分析 −立ち上がり動作− ... 73
ii 4.1 緒言 ... 73 4.2 手すりを用いた立位動作 ... 73 4.2.1 手すり ... 75 4.2.2 トイレ設備 ... 76 4.2.3 被験者... 77 4.2.4 条件 ... 77 4.2.5 実験方法 ... 79 4.2.6 実験結果 ... 81 4.2.7 考察 ... 89 4.3 Plastic AFO に作用する荷重 ... 90 4.3.1 実験装置 ... 90 4.3.2 被験者... 91 4.3.3 条件 ... 92 4.2.4 実験方法 ... 93 4.2.5 実験結果 ... 93 4.2.6 考察 ... 107 4.4 結言 ... 108 第5章 FEM を用いた力学的荷重分析 ... 109 5.1 緒言 ... 109 5.2 静的負荷実験 ... 109 5.2.1 予備実験 ... 109 5.2.2 装具トリミング ... 115 5.2.3 実験装置 ... 116 5.2.4 実験方法 ... 117 5.2.5 実験結果 ... 117 5.3 FEM 解析 ... 119 5.3.1 装具モデルの作成 ... 119 5.3.2 解析環境 ... 122 5.3.3 解析結果 ... 125 5.4 装具モデルの出力 ... 131 5.5 考察 ... 132 5.6 結言 ... 134 第6章 結 論 ... 135 参考文献 ... 138 主な論文 ... 143
1
第1章 序 論
1.1 研究背景
近年,世界中で高齢化が問題となるなか[文献 1-1,1-2],わが国では世界 の高齢者人口割合を大きく上回る,総人口の約 28%を超える 3500 万人以上が 65 歳以上との調査結果[文献 1-3]が報告されている.加齢により運動能力や体力が 低下することで,日常生活に様々なリスクが現れる.総務省統計局の報告による と,死因分類別にみた死者数[文献 1-4]は悪性新生物(27.9%),心疾患(15.3%), 脳血管疾患(8.2%)が多くを占めている.脳血管疾患は脳卒中や脳梗塞のこと を指し,罹患者の約 21.7%で後遺症が現れると報告[文献 1-5]されている.後遺 症は脳損傷を起こした場所により異なる症状(例えば,片麻痺,言語障害など) が現れる[文献 1-6].なかでも片麻痺を発現した場合,日常生活での移動が困難 となり Quality of Life が著しく低下する.さらに麻痺した下肢では,つま先が下 がってしまうこと(以下,下垂足)による尖足歩行や痙縮による身体バランスの 不安定化が生じるため,転倒のリスクが増加する恐れがある.これらリスクを低 減するため,多くの後遺症のある罹患者に下肢装具が処方される[文献 1-7,1-8]. 下肢装具は後遺症の程度の大きさや用途に応じて,長下肢装具や短下肢 装具(Ankle Foot Orthosis:以下,AFO),継手を持つ AFO(Fig.1-1)[文献 1-9]な ど様々な種類のものが用いられる.AFO には金属支柱タイプやプラスチックタ イプ(Plastic AFO:以下,装具)等があるが,後者の材料には熱可塑性樹脂が用 いられ,軽量で丈夫であるほか美観性や加工性が装具に求められるニーズと一 致していることから多く製作されている.高嶋[文献 1-10]は全国 51 社の装具製 作施設でアンケート調査をおこない,平均の装具製作数から年間製作数に換算 し推定する手法を用いて,製作数の占める割合を明らかにした.その結果,約 19,000 件の製作数のうち,金属支柱タイプは 23%,プラスチックタイプは約 75% と報告している.さらに同氏は足継ぎ手付き装具の調査もおこなっており,脳卒 中片麻痺患者の装具装着歩行において生体力学の観点から,装具に求められる 下肢の矯正力について述べている.その結果,片麻痺の症状によっては,角度や 背屈補助力の調整可能な足継ぎ手付き装具は十分に有効であると報告している. 他にも,装具については様々な研究がおこなわれている.例えば,渡辺ら[文献 1-9]による装具の選択に関する研究では,金属支柱タイプとプラスチックタイプ の比較と複数の機能障害に対して,装具を処方する大まかな選択基準を述べて いる.金属支柱タイプの利点は強度が高く破損しにくい,運動可動域の設定が容 易である,仮合わせ時の修正や破損時の修理が容易,などが挙げられるが,一方 で重さや金属部分のサビ,革部分の衛生面などの問題点を取り上げている.プラ2
スチックタイプでは,プラスチック特有の軽さや清潔さ,外見の良さなどを取り 上げる一方で,耐久性や修理の困難さ,通気性などの問題点を挙げている.高田 ら[文献 1-11]や渡辺ら[文献 1-12]は足継ぎ手付き装具の特徴や,その傾向から新 たな装具の試作について報告している.なかでも Saga plastic AFO の特徴は,材 料のポリプロピレンの厚さ(4 mm,5 mm,6 mm)と継手部分(Fig.1-1)の金属 片の厚さ(2 mm,3 mm)を変更することで,たわみ強さを調整できることであ る.この部分を変更した Saga plastic AFO の試作・臨床応用では,たわみの場所 が足関節軸に近いこと,歩容が良いこと,側方安定性に優れていることを報告し ているが,同時に外観が他の装具より劣ると報告している.また装具が歩行に及 ぼす影響については,山本ら[文献 1-13,1-14]や小林ら[文献 1-15]により報告さ れている.山本らは装具の弾性変形のしやすさ(以下,可撓性)や初期角度が歩 行に及ぼす影響を調査しており,実験用装具を用いて片麻痺患者での歩行実験 をおこなっている.その結果,装具の効果は足関節角度,膝関節角度と関節モー メントに影響を与えるが,その個人差は大きいと報告している.また装具に求め られる患側接地時の矯正モーメントは底屈方向 10 度の支柱の回転に対して 2~ 20 Nm の範囲内で 5 段階程度,足関節初期角度は背屈 0~10 度の範囲内で 3 段 階の調整が可能であることが望ましいと報告している.小林らは健常者におい て装具装着歩行をおこない,立脚相中において足関節固定が下肢関節に与える 影響を分析している.その結果,足関節では立脚相 0%,立脚相 100%で有意に 背屈位になる一方で,膝関節では立脚相 20~40%を除く全ての立脚相で有意な屈 曲位を示し,さらに床反力と足関節と股関節の関節力は立脚相前期と後期で小 さく,中期では大きくなると報告している.一方で足関節の関節力は立脚相後期 で小さい値を示すことから,AFO 装着により足関節の運動や力学的作用は制限 されるが,他の関節を大きく動かすことで代償されると報告している.歩行以外 の動作では,立ち上がり動作に与える影響についても研究されており,高野ら [文献 1-16,1-17]は健常者と片麻痺者において,装具装着時の足関節可動域の違 いが立ち上がり動作に及ぼす影響を調査している.その結果,片麻痺患者では患 側の床反力と足関節伸展は小さくなるが足関節底屈モーメントは大きくなると 報告している.また健常者では,装具足関節を固定した場合は足関節底屈モーメ ントが生じ,足関節を可動とした場合は,足関節背屈モーメントが生じると報告 している.このように装具の形状や,装具を装着した際の動作における身体が受 ける影響については数多く報告されているが,その一方で装具が装具利用者か ら受ける力学的荷重を直接調べた研究はほぼ見られず,特に歩行遊脚相におけ る力学的荷重の計測に関する研究はほぼ皆無である.つまり,「装具が装具利用 者をどの程度支援しているのか」を直接的かつ定量的に計測する方法が見受け られないことこそ,著者らが着目した点である.このような状況のため,装具の
3 製作では,厚みや形状などは義肢装具士の経験則により決められるため,明確な 処方基準が確立されていない.さらに製作過程における装具の過剰なトリミン グによる調整ミスや使用期間の長期化による破損が生じた場合,同一形状の装 具を製作することは,現在の製作手法では事実上不可能であると考える. 著者らは,日常動作を構成する要素を大きく「歩行動作」と「立ち上が り動作」に分けて考え,装具が利用者から受ける荷重状態を直接調べるため,装 具に複数のセンサを取り付け歩行動作や立ち上がり動作中に装具に作用する荷 重を測定できる新しい計測システムを開発した.同システムを用いて,動作中に 装具に作用する荷重や装具の変形角度などを計測し,装具がどの程度の荷重を 受けているのかを分析すること,また健常者とはどのような差異があるのかに ついて比較検討することで力学的荷重に基づいた装具設計を目指した.また,研 究を進める中で,現状の装具の製作手法に変わるデジタル技術を応用した従来 にない装具の設計システムの構築の可能性が見いだされた.具体的には,3D CAD や有限要素解析の利用であるが,近年発展の目覚ましい3D スキャナや3 D プリンタなどの活用も考える.これらデジタル技術の応用は,従来の製作手法 では課題であった,○同じ装具の再製作,○患者に応じた装具への機能付加と修 正,○装具の機能評価と設計への反映,などを容易にするもので,次世代の装具 設計の方向性を示すものである. そこで,著者らが提案するシステムが,義肢装具士による自動装具設計 システム(半自動設計システム:以下,設計システム)である.同システムのフ ローチャートを Fig.1-2 に示す.このシステムは,①身体形状データの獲得(3 D スキャナ),②同データからの形状設計(3D CAD),③有限要素解析によるシ ミュレーション,④装具製作(3D プリンタ),⑤製作装具の試歩行・評価,な どからなる.まず,①身体データの獲得では,3D スキャナを用いて下肢の形状 を取得する.次いで,②形状設計では,3D CAD を用いて下肢の形状から装具 の形状設計をおこなう.③有限要素解析では,形状設計をおこなった装具の CAD モデルに荷重を加え変形のシミュレーションを実施する.シミュレーションで 要件が満たされた場合,3D プリンタを用いて④装具製作をおこない,⑤適合評 価を実施する.適合評価で OK と判断された場合,形状を確定し装具を出力す る.NG の場合は再度②形状設計に戻り,適合評価で OK の判断になるまで②~ ⑤を繰り返し実施する流れとなる. 本論文は,設計システムを構築するために必要なデジタル技術の確立を 目指すこと,またそのために必要となる装具に作用する力学的荷重を明らかに することを主眼としている.
4 Fig.1-1 継ぎ手付き装具 出典:日本義肢装具学会誌 vol.6,No.3(1990) 引用:渡辺 英夫, 浅見 豊子, 有薗 修, 高田 浩, 徳田 章三『プラスチック短 下肢装具の適応と選択』(P.221 図 1)より一部引用 Fig.1-2 設計システムのフローチャート
5
1.2 各章の概要
本論文は,著者らが構築を目指す設計システムに必要なデータを獲得す るために必要な装置を開発し,同装置を用いた実験から得られた知見をまとめ たものである.論文は 6 章立てであり,各章の概要は以下の通りである. 第 1 章では,本研究の背景および研究の目的を示す. 第 2 章では,まず装具の製作材料と製作方法について説明し,次いで従 来の製作方法の課題とそれに対する解決策である著者らの提案する設計システ ムについて述べる.その後,装具装着歩行における立脚相中に装具に作用する力 学的荷重について取り上げる.同荷重を計測するためのシステムを開発し,歩行 実験をおこなうことで,健常者および片麻痺者における力学的荷重の大きさと その傾向の解明を目指す. 第 3 章では,装具装着歩行における遊脚相中に装具に作用する力学的荷 重について取り上げる.これまでの研究では,遊脚相中に装具に作用する荷重を 計測した報告は見当たらない.そこで,遊脚相中に装具に作用する荷重計測シス テムを開発し,歩行実験から片麻痺者の歩行障害の重要な原因である下垂足の 支援と荷重の傾向を明らかにする. 第 4 章では,トイレ座面からの立ち上がり動作中に装具に作用する力学 的荷重と官能評価について取り上げる.片麻痺者が困難とする動作に立ち上が り動作がある.本章では,事前に健常者で立ち上がり動作実験を実施することで 力学的荷重などを分析した.次いで,装具装着状態における立ち上がり動作を実 施し,踵の位置の違いによる装具に作用する力学的荷重を明らかにする. 第 5 章では,設計システムで求められるデジタル技術の中でも重要なシ ミュレーションの有効性について取り上げる.3D スキャナを用いてコンピュ ータ上に装具モデルを作成し,有限要素解析による装具変形のシミュレーショ ンを行ない,実際の装具の変形を比較することで有限要素解析の有効性を明ら かにする. 第 6 章では本研究の結論として,各章で得られた研究結果と設計システ ムの構築の可能性についてまとめる.6
第2章 力学分析 −立脚相−
2.1 緒言
本論文で提案する設計システムの構築には,第 1 章の後半で述べた①~ ⑤の技術が必要である.特に③のシミュレーションを実施するためには,実際に 装具が装具使用者から受ける荷重をもとに,装具に作用する応力や変形量の解 析をおこなうため,装具に作用する力学的荷重のデータが不可欠である.装具に 関する研究については 1 章でも述べたとおり,その形状や身体への影響を調査 したものが多く,装具に作用する力学的荷重を調査したものは見受けられない と考えられる.本章では,シューホーンブレース(Shoe Hone Brace:以下,SHB)モデ ルの装具装着歩行をおこなった場合,下肢から装具に作用する力学的荷重の分 析について述べる.Fig.2-1 は装具を装着した左足を示し,1 歩行周期を示したも のである.この図より足が地面に接地しているフェーズである立脚期(以下,立 脚相)と,足が地面から離床するフェーズである遊脚期(以下,遊脚相)から構 成され,立脚相は大きく分けて,踵接地直後の立脚相前期,爪先が離床する立脚 相後期とその中間である立脚相中期に分けられる.本章では立脚相中の力学的 荷重分析について報告する. 立脚相後期 立脚相中期 立脚相前期 遊脚相 Fig.2-1 1 歩行周期(右から左に歩行)
7
2.2 プラスチック短下肢装具
脳卒中片麻痺患者に処方される装具には,多種多様な材料や装具形状が 用いられる.本節では装具の中でも,製作頻度の高い形状に使用される製作材料 および製作手順について説明する.2.2.1 プラスチック短下肢装具の材料
1 章でも述べたように,最も製作率の高い装具はプラスチック製の AFO であることから,本研究で使用する装具は, プラスチックタイプを対象とした. 装具は疾病などにより神経障害の生じた患者に対して医師の診断により処方さ れるもので,その診断結果に基づいて義肢装具士によって製作される.装具の形 状は様々であり,代表的なもの [文献 2-1] として◎SHB モデル,◎テキサス型 SHB モデル(Texas Institute for Rehabilitation and Research: 以下,TIRR),◎Saga Plastic AFO 継ぎ手モデル,◎スパイラル(ヘミスパイラル)型など(Fig.2-2-1) があり,その他にも多くの種類 [文献 2-2] が存在する.これらの装具は,神経 障害に起因する下垂足の防止のほか,支柱の向きや形状によって底屈方向支持 や背屈方向支持など,障害程度や状況の違いによる歩行転倒のリスクを回避す るために用いられる.いずれの場合においても,装具はつま先から脹脛部分(以 下,腓腹部)にかけてベルトで装着固定し,装具の可撓性を利用して歩行を補助 することができる. 装具には高い可撓性が求められる一方で,装具ユーザは外観や快適性を 重視し,義肢装具士からは製作や加工の容易性を重視するなど様々なことが要 求される.これらの要求を満たすため,装具の材料には様々な熱可塑性樹脂が用 いられている.義肢や装具を手がけている株式会社 有薗製作所の装具総合カタ ログ [文献 2-3] によると,AFO には以下 6 種類の材料が推奨であると記されて いる. PE500(分子量 50 万の高密度ポリエチレン) 高密度ポリエチレン(PE-HD,HDPE:High Density Polyethylene) PP-H(ポリプロピレン 100%)
オルソレン サブオルソレン コ・ポリマー
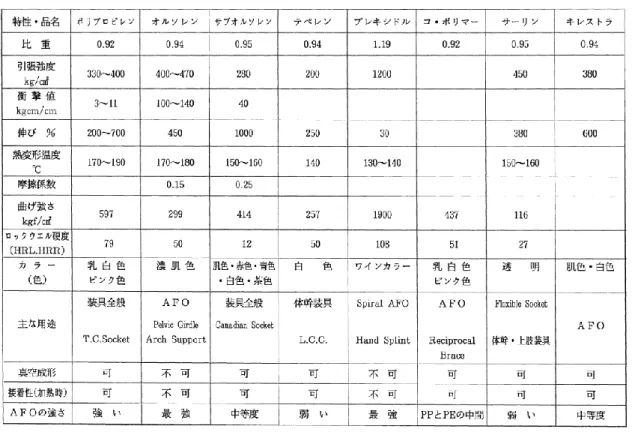
8 これらの熱可塑性樹脂については,いくつかの検討がなされている.例えば,川 村 [文献 2-4] による引張試験や繰り返し試験,有薗ら [文献 2-5]による材料の 特徴やねじれ強度についての報告などがある.有薗らの報告では熱可塑性材料 について詳細に報告されているため,Table 2-2-1 に引用掲載する.この表に掲 載されている熱可塑性樹脂の中でも,AFO 製作で使用率の高いものが 3 系統 6 種類である.それぞれの特徴は以下の通りである. ポリプロピレン(PP) プロピレン [化学式:(C3H6)n] を重合させた樹脂(比重:0.90~0.92). 引張強度が高く(330~400 kg/cm2: 32.4~39.2 MPa),その他機械的特性(衝 撃強度,圧縮強度)にも優れている.また耐摩耗性や耐薬品性,耐熱性を 備えている.これらの特性から,AFO のみならず装具全般で使用される 材料である. ポリエチレン(PE) エチレン [化学式:(C2H4)n] を重合させた樹脂.分子量や結晶性の違い で密度(3 種 16 種類 [JIS K6922-1] )や機械特性が大きく異なる.また, 酸やアルカリを含む耐薬品性に優れている.PAFO で用いられる PE には 大きく分けて 4 種類に分けられるので,それぞれについて説明する.
低密度ポリエチレン(Low Density Polyethylene:LDPE)
エチレンがランダムな分岐構造を持って結合した密度 910~930 kg/m3の樹脂.他の PE と比較して比較的柔らかい軟質ポリエチレン や硬い性質を持つ硬質ポリエチレンがこの種類にあたる. キレストラ (Kirestora) 密度 940 kg/m3,引張強度が 380 kg/cm2(37.3 MPa)の樹脂.耐衝撃 性や耐摩耗性,耐薬品性に優れており,軽量であることからスパイラ ル型の装具(Fig.2-2-1d)などの材料に使用されている. サブオルソレン ( Sub-Ortholen) エチレンが直鎖状に結合した密度 950 kg/m3,引張強度 280 kg/cm2 (27.5 MPa),分子量が 30~50 万(通常のポリエチレンは 5~30 万) の高密度ポリエチレン.耐衝撃性や耐摩耗性,耐化学薬品性に優れて おり,成形のしやすさ,熱による収縮が小さいことなどから装具の材 料に使用される.その一方で機械的特性についてはオルソレンに若
9 干劣る. オルソレン (Ortholen) ドイツ Teufel 社で開発された分子量が 100 万以上ある超高密度ポ リエチレン.密度 940 kg/m3,引張強度 400~470 kg/cm2(39.2~46.1 MPa)である.本章で取り上げる 6 種類の材料の中で耐衝撃性が最も 高く強靭であり,耐摩耗性や堅牢性に優れている.これらの特性を活 かし古くから AFO で使用されている.一方で他の材料と比較して成 形加工が難しく,高い技術が要求される. プレキシドル 密度 1190 kg/m3,引張強度 1200 kg/cm2のアクリル系樹脂.透明度が高 く,耐候性がよい(変色,硬化,変形・ひび割れなどが少ない).機械的 特性がよく,曲げ強さも 1900 kgf/cm2(186.3 MPa)と他の材料と比較して 最も高いため,スパイラル型の装具(Fig.2-2-1d)などの材料に用いられ る. 装具の材料には上記の熱可塑性樹脂以外にも,高分子プラスチックのテペレン や熱可塑性ポリマーのサーリン®(デュポン,USA)など用途や症状に応じて様々 なものが利用されることがある.本研究では義肢装具士による手作りの装具を 被験者ごとにオーダーメイドするため,加工の容易性(真空成形など)や比重の 小さい(軽量である)などの条件から,PP 製の SHB モデル(Fig.2-2-1a)の装具 を使用した.
10
(a) SHB モデル (b) TIRR モデル*
(c) 継ぎ手モデル** (d) Spiral (Hemi Spiral) モデル** Fig.2-2-1 代表的な装具の形状 4 種類 *出典:澤村義肢製作所ホームページ 引用:製品紹介『http://sawamuragishi.jp/products/sougu/kashi.html』より一部引用 **出典:日本義肢装具学会誌 vol.6,No.3(1990) 引用:渡辺 英夫, 浅見 豊子, 有薗 修, 高田 浩, 徳田 章三『プラスチック短 下肢装具の適応と選択』(P.221 図 1)より一部引用
11
Table 2-2-1 熱可塑性樹脂とその特徴
出典:日本義肢装具学会誌 vol.6,No.3(1990)
引用:有薗秀昭,蜂須賀研二,緒方甫『プラスチック短下肢装具(AFO)の素材 -材料の特徴および特にねじれ強度について-』(P.245 表 1)
12
2.2.2 プラスチック短下肢装具の製作方法
本項では,SHB モデル(靴べら型)の装具の製作方法について説明する. Figure 2-2-2 は株式会社早川義肢製作所 [文献 2-6],株式会社啓愛義肢材料販売 所 [文献 2-7],有限会社垣内義肢製作所 [文献 2-8] のホームページで紹介され ている装具の成形加工の過程を一部抜粋し詳しく説明した内容である.製作過 程は大きく分けて以下 (a) ~ (g) のプロセスに分類される. (a) 採型 患側の下肢にラップを巻き,採型のための準備をおこなう.ラップを巻 き終えた後,ラップ上から解剖学的ランドマーク 7 箇所(腓骨頭,内踝, 外踝,第一中足骨骨頭,第五中足骨骨頭,骨底,舟状骨)にマーキングを おこない,水に浸した採型用ギプス包帯を巻く.今回使用する装具は足裏 から腓腹部にかけて下肢を支持する「後方支柱型装具」であるため,装具 製作に必要のない部分(脚部前方)に紐を配置し,ギプス包帯を取り外す ための位置を確定しておく.ギプスが硬化したら,配置した紐に従いギプ スを切り開き取り外す. (b) 陰性モデル・陽性モデルの製作 採型し下肢から取り外したギプスモデル(以下,陰性モデル)の切り開 いた箇所を修正(シール)し石膏を流し込み,下肢の石膏モデル(以下, 陽性モデル)を製作する.石膏を流し込む際,鉄パイプなどを埋め込むこ とで陽性モデルの取り回しを改善する工夫をおこなう.ギプスを取り外し た陽性モデルはギプス包帯の後や凹凸があるため,なめらかになるよう削 り修正や盛り修正をおこなう.この陽性モデルが装具製作時の Mold とな る. (c) 熱可塑性樹脂での成形(樹脂成形) 陽性モデルを固定し,シートフォーミングや真空成形法を用いて熱可塑 性樹脂の下肢形状への成形をおこなう. (d) トリミング(カッティング) 陽性モデルから下肢形状に成形した熱可塑性樹脂を取り外し,処方され るべき形状にトリミング加工を施す.13 (e) 装具の仮合わせと修正 医師や義肢装具士など同伴のもと,製作した装具を依頼者の下肢に取り 付け(仮合わせ)をおこない,修正箇所をチェックする.このとき,仮合 わせと修正の作業回数は複数回実施される場合がある. (f) ストラップの製作と取り付け 仮合わせと修正が完了した後,装具を下肢に固定するためのベルト(も しくはベルクロファスナー)を取り付ける. (g) 完成 医療機関において,医師や義肢装具士などが製作した装具の適性検査を おこない,問題がなければ依頼者に処方される.
14 1. 裸足になる 2. ラップを巻く 3. 腓骨頭,外踝にマークする 4. 紐を配置する 5. ギプス包帯を巻く 6. 紐に沿いギプスを切り開く 7. ギプスを取り外す (a) 採型 Fig.2-2-2 装具製作手順
15 (b) 陽性/陰性 モデル製作 (c) 樹脂成形 (d) トリミング (e) 仮合わせと修正 (f) ストラップ製作/取付 (g) 完成 Fig.2-2-2 装具製作手順
16
2.2.3 現状の問題点と設計システムの提案
前項で紹介した装具の製作方法には,改善を必要とする箇所がいくつか 存在するが,大きく2つ,「義肢装具士の介入」と「技術的な問題」がある.装 具を製作するのは義肢装具士であり,この人たちは装具製作の専門知識を習得 したいわゆる熟練技能者である.義肢装具士の育成(技能の習得)には多くの時 間とコストを必要とする.そして装具を必要とする人は義肢装具士の採型を必 ず受けなければならない.装具を必要する,つまりは後遺症を患っていることが 考えられ,義肢装具士のもとを訪れるためには身体的に困難な動作である移動 を必要とする.また義肢装具士が患者を訪問し採型する場合もあるが,複数の道 具を持ち運ばなければならないことや,他の業務をおこなうことができないな どの問題が生じる. 次に技術的な問題がある.装具には義肢装具士が厚みの変更やトリミン グ加工を施すことで,その形状が利用者の下肢にフィットするように加工され る.どの箇所をどれくらいの厚みにするのか,またどこをトリミングするかは義 肢装具士の勘と経験により決定されている.しかし,この加工には大きな技術的 問題がある.装具製作後の段階において,○一度製作した装具に厚みを追加する, ○加工(トリミング)をおこなった装具を元の形状に戻す,などの作業をおこな うことは事実上不可能である.厚みを追加したい場合については,予め厚めの装 具を製作後にトリミングにより薄くすることで厚みをもたせることは可能であ る.しかしトリミングを過剰におこなった場合,もとに戻すことはできない.ま た,製作した装具は一度の調整で患者にフィットすることは少なく,トライアン ドエラーの調整により患者に適応した形に成形される.調整も不可逆加工であ り,装具を元の形状に戻すことはできず,またトライアンドエラーの調整では, 患者に身体的疲労を強いることになる. これらの問題を解決する手法として,著者らの提案する設計システムが ある.同システムは Fig.2-2-3 に示すよう,以下のプロセスから構成される. ① 3D スキャナを用いた採型 ② CAD による形状設計 ③ コンピュータシミュレーション ④ 3D プリンタによる装具製作 ⑤ 適合評価・形状確定 この製作手順では,はじめに義肢装具士は①3 次元データ獲得のため,3D スキ ャナを用いて患者の患側下肢をスキャニングし採型する.従来のプロセスでは17 手順の (a) ~ (c) に相当し,ラップやギプス,水など様々なものを必要とするが, 設計システムではコンピュータと3D スキャナのみを使用するので短時間で採 型が完了する.次に CAD ソフトを用いて,獲得した下肢データから装具の②形 状設計をおこなう.このとき,くり抜きやコルゲーションなど必要に応じて様々 な形状を作成することが可能である.また 3 次元データに加工をおこなうため, 何度でも設計をやり直しできるのがこのシステム特徴である.このプロセスは 従来の手順 (d)トリミングに相当するが,従来の場合,不可逆的な加工となるた め加工で不具合が生じると再度,手順 (c) の樹脂成形をおこなう必要がある. 形状設計が終わると,③有限要素解析をおこなう.この段階では,設計した装具 モデルを用いて荷重を印加した際のシミュレーションをおこない,装具の厚み やトリミング量の違いによる変形量や応力の集中する場所を解析することがで きる.従来のプロセスではこの操作は存在せず,デジタル技術を応用するメリッ トでもある.シミュレーション後は④装具製作をおこなう.3D プリンタを利 用することで,短時間で装具を出力できる.出力した装具を使用し,⑤ 適合評 価をおこなう.この段階で使用者に疼痛などが生じた場合,再度②形状設計戻る ことで②~⑤のサイクルを繰り返すことになる.⑤適合評価で問題がない場合, 形状を確定する.従来のプロセスであれば,一度製作した装具の使用年数が長期 に渡ることで破損が生じた場合,同一形状の装具を製作することは難しい.しか し,設計システムの場合,形状を確定した装具のデータを保存しているため,同 データを3D プリンタで出力することで,短時間で同一形状の装具を製作する ことが可能となる.これは従来のプロセスでは成し得ない画期的なことであり, 設計システムの最大の特徴である.
18
19
2.3 実験装置
歩行実験では,下肢から装具に作用する力学的荷重を計測するため,腓 腹部に力覚センサを取り付けることのできる特別な形状の装具を使用した.通 常,医師から処方される装具は Fig.2-3-1 に示すような形状をしている.しかし, この形状では腓腹部にセンサを取り付けて力学的荷重を計測することは困難で ある.そこで本実験で使用する装具の形状は,腓腹部に力覚センサを取り付ける 事のできる形状,つまり上部と下部に分かれる形状とした(Fig.2-3-2).本論文 の歩行実験および立ち上がり動作実験では,この形状の装具を使用し,各実験に 必要なセンサを取り付ける加工を施した.その詳細を本項で説明する. Fig.2-3-1 通常の装具 Fig.2-3-2 実験用装具2.3.1 実験用 Plastic AFO
歩行立脚相における力学的荷重分析用計測システム(以下,立脚相分析 システム)を Fig.2-3-3 に示す.Fig.2-3-3a は立脚相分析システムの全体像を示し ている.Fig.2-3-3b は本実験で実際に使用した装具装着時の写真を示し,Fig.2-3-3c は装具の概略図,Fig.2-3-3d には各センサの軸方向をそれぞれ示す.このシス テムには,3 つの 6 軸力覚センサと 1 つの 3 軸力覚センサ,2 つのフレキシブル ゴニオメータを使用した. 装具の腓腹部に作用する力学的荷重を計測するため,6 軸力覚センサ (Mini45-E, ATI Industrial Automation, NC, USA)を取り付けた.同センサの詳細 を Fig.2-3-4 に,機械的特性を Table 2-3-1 に示す[文献 2-9].このセンサは装具装 着歩行中のセンサの影響を最小限にするため,小型(直径 45 mm,厚さ 15.7 mm) で軽量(91.7 g)かつ剛性の高い材料(ステンレス鋼)で作られたものを使用し15 cm
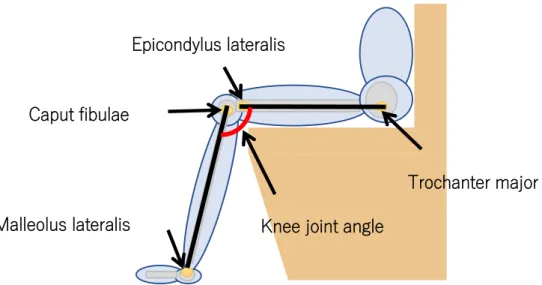
20 た.このセンサは比較的小さいが,取り付け方には少し工夫を加える必要がある. 通常,片麻痺患者に処方される装具は Fig.2-3-1 で示したような形状であり,上 部と下部に分かれる構造になっていない.上部と下部に分かれる構造かつ腓腹 部センサを取り付けることで本来の装具の機能を損なう可能性がある.そこで, 6 軸力覚センサを装具の上部と下部にそれぞれ接するように取り付け,上部と下 部は互いに接触しないように取り付けた(Fig.2-3-5).このような構造をとるこ とで,装具の上部に作用する力学的荷重は,下部に伝達され通常の装具としての 役割を担う構造となっている.同センサの軸方向について,歩行中 Fig.2-3-3 に 示す Fzc の正方向側に作用する力学的荷重を底屈方向荷重,Fzc の負方向側に作 用する力を背屈方向荷重とする. 歩行中の歩行周期を識別するため,床反力計測装置(Fig.2-3-6a)を使用 した.この装置は左足用の靴(CENTER HI PM11 CH 1U,PF-FLYERS,CA,USA) の足底部をくり抜き,その中に 6 軸力覚センサ(腓腹部に設置したものと同型, Mini45-E)を 2 つ設置した構造となっている(Fig.2-3-6b,2-3-6c).6 軸力覚セン サを取り付けるために,厚さ 1.6 mm のガラスエポキシ(銅張積層板 No.35, Sunhayato,Tokyo,Japan)で製作した冶具で挟み込む構造とし,ガラスエポキシ とセンサは片面 3 が所(両面 6 箇所)固定し,靴と靴底側のガラスエポキシを 4 箇所ネジで固定した.6 軸力覚センサの取り付け位置は,前足部センサは中足指 節関節付近,踵部センサは踵骨付近に位置するよう取り付けた.また Fig.2-3-6a の状態の床反力計を装着した歩行では歩きづらいため,発泡ポリ塩化ビニル板 で作製したインソールと反発の少ない中敷きを取り付けた.床反力計は患側の 靴のみに取り付けている.このとき,患側と健側の靴の高さは同じになるよう設 計した.この床反力計は,装具を装着した下肢をそのまま取り付けられる構造と なっている. 歩行中における力学的荷重の影響による装具の変形量および膝関節の 可動角度を計測するため,足関節および膝関節にフレキシブルゴニオメータ (SG150, Biometrics Ltd, Newport, United Kingdom)を取り付けた.フレキシブル ゴニオメータを Fig.2-3-7 に,センサの仕様を Table 2-3-2 に示す[文献 2-10].Fig.2-3-8 に示すよう,足関節のフレキシブルゴニオメータ(以下,足関節ゴニオメー タ)については,T 型と I 型の金属製冶具を装具に取り付け,その冶具上に足関 節ゴニオメータを取り付ける構造とした.このとき,T 型冶具は外踝部分に取り 付ける構造とし,取り付け角度は装具を直立させた状態で,地面と T 型冶具の なす角度が 45 度となる設計とした.I 型の冶具は装具下部の下腿骨腓骨頭の下 部に取り付ける構造とし,装具上部と I 型冶具もしくはそれを固定するためのネ ジが干渉しないように取り付けた. 膝関節角度を計測するため,膝関節の解剖学的ランドマークを基準[文献
21 2-11]にフレキシブルゴニオメータ(以下,膝関節ゴニオメータ)を取り付けた. 膝関節ゴニオメータの一端を大腿骨大転子(以下,大転子)と大腿骨外側上顆(以 下,外側上顆)を結ぶ直線上に貼付し,他端を下腿骨腓骨頭(以下,腓骨頭)と 下腿骨外踝(以下,外踝)を結ぶ直線直線上に貼付した.この解剖学的ランドマ ークを結ぶ直線のなす角度を本実験では膝関節角度と定義した(Fig.2-3-9). (a) システム全体像 (b) 装具装着時 (c) 概略図 Fig.2-3-3 立脚相分析システム
22 (d) センサ軸方向 Fig.2-3-3 立脚相分析システム Fig.2-3-4 6 軸力覚センサ (a) 装具組み立て写真 Fig.2-3-5 装具へのセンサの取り付け θk
23
(b) 概略図
24 (a)全体図 (b)内部構造 1 (c)内部構造 2 Fig.2-3-6 床反力計測装置
25 Fig.2-3-7 フレキシブルゴニオメータ SG150 (a) 冶具の取り付け (b) I 型冶具 (c) T 型冶具 Fig.2-3-8 足関節ゴニオメータ取り付け図
26
Fig.2-3-9 膝関節角度の決定
Table 2-3-1 6 軸力覚センサのの仕様詳細
Group Contents Value Unit
Single-Axis Overload Fx, Fy ± 5100 N
Fz ± 10000 N
Tx, Ty ± 110 Nm
Tz ± 140 Nm
Stiffness(Calculated) X-axis & Y-axis force 7.4x107 N/m
Z-axis force 9.8x107 N/m
X-axis & Y-axis torque 1.7x104 Nm/rad
Z-axis torque 3.4x104 Nm/rad Resonant Frequency Fx, Fy, Tz 5600 Hz
Fz, Tx, Ty 5400 Hz
Physical Specifications Weight 0.0917 kg
Diameter 45 mm
Height 15.7 mm
Trochanter major Caput fibulae
Malleolus lateralis Knee joint angle Epicondylus lateralis
27 Table 2-3-2 フレキシブルゴニオメータの仕様詳細
2.3.2 歩行路
室内の一角に歩幅を計測することのできる歩行路を製作した.サイズは 10 歩程度歩ける距離として,幅 1800 mm,奥行き 3000 mm とした.使用した歩 行路を Fig.2-3-10 に示す.歩行路の左右から中央に向かい 900 mm の位置まで歩 幅を計測するためのビニールテープを 100 mm 刻みで貼付した. Fig.2-3-10 歩行路Group Contents Unit
Life 600,000 cycles minimum
Repeatability ± 1 degrees
Analogue resolution Infinite
Temperature Operating 0~40 ℃ Storage -20~+50 ℃
Humidity Operating 30~75 %
Storage 30~75 %
degrees measured over 90° from neutral position
Value
± 2
28
2.3.3 LabVIEW
LabVIEW は PCI eXtensions for Instrumentation(PXI)システムと呼ばれ る 3 つのコンポーネント(シャーシ,コントローラ,周辺モジュール)で構成さ れる PC ベースのハードウェアプラットフォームである.また LabVIEW そのも のは Windows 7 プラットフォーム上で動作するグラフィカル型プログラミング ソフトウェアである.本実験では装具に装着した各センサおよび膝関節に取り 付けたフレキシブルゴニオメータのデータは,アンプ,AD コンバータもしくは Data Acquisition Device(以下,DAQ デバイス)データ収録ソフト LabVIEW (LabVIEW 2013,National Instruments,TX,USA)を用いて記録した.各センサ の接続概略図を Fig.2-3-11 に示す.各 6 軸力覚センサは DAQ デバイスを通して, フレキシブルゴニオメータはゴニオカプラ(PH-413, DKH Co.,Ltd., Tokyo, Japan) と DAQ デバイスを通して,3 軸力覚センサはアンプと AD コンバータを介して PC に接続する.なお膝関節のフレキシブルゴニオメータも足関節のものと同様 の接続をおこなう.
29
2.4 実験条件
本節では,歩行実験をおこなうに当たり協力いただいた被験者の情報お よび歩行条件について述べる.2.4.1 被験者
歩行実験の被験者には健常者 6 名(平均年齢 30.3 歳,平均体重 63.6 kg) と脳卒中罹患による左側片麻痺の後遺症を持つ患者(以下,片麻痺者)7 名(平 均年齢 57.6 歳,平均体重 63.1 kg)の合計 13 名に協力いただいた(Table 2-4-1). なお本実験は近畿大学生物理工学部生命倫理委員会より承認を得ている.また 実験に参加する被験者全員より事前にインフォームド・コンセントを得ている.片麻痺者の麻痺の程度を表す方法として,Brunn Strome Recovery Stage (以下,Brs.)を用いた.Brs.は Signe Brunnstrome [文献 2-12] により考案された 片麻痺者の運動検査法である.脳卒中の運動麻痺の回復過程を順序により判断 するために考案された評価法で,順位尺度が用いられる.わが国でも多く利用さ れており,麻痺の程度は Stage I から Stage VI の 6 段階で評価される.各ステー ジの詳細を以下に示す. Stage I 弛緩性麻痺(完全麻痺) 筋肉が完全に弛緩し,随意運動を全くおこなえない状態. Stage II 連合反応の出現 非麻痺側の過剰努力により,麻痺側でも筋収縮が生じる状態. Stage III 共同運動の出現 個々の筋肉を動かすことが困難であり,付随する他の筋肉まで 動く状態.屈曲側もしくは伸展側の共同運動がある. Stage IV 分離運動の出現 それぞれの関節を動かせるようになる. Stage V 分離運動の進行 それぞれの関節を高度に動かすことができる. Stage VI 正常に近づく 共同運動や痙性(麻痺)が弱まり,正常な状態に近づく.
30 これらの症状は上肢(肩,肘),手指,体幹と下肢の 3 つの部位について,それ ぞれの動作が記されている.本研究では歩行動作について分析をおこなうため, 体幹と下肢に関する Brs.に基づいた麻痺の程度を以下に記す[文献 2-13]. Stage I 弛緩性麻痺 Stage II 下肢のわずかな随意運動 Stage III 座位,立位での股・膝・足の同時屈曲 Stage IV 座位で足を床の後方へ滑らせて,膝を 90 度屈曲 踵を床から離さずに随意的に足関節背屈 Stage V 立位で股伸展位,またはそれに近い肢位,免荷した状態で膝屈曲 分離運動 立位,膝伸展位で,足を少し前に踏み出して足関節背屈分離運動 Stage VI 立位で,骨盤の挙上による範囲を超えた股外転 座位で,内・外側ハムストリングスの相反的活動と,結果として 足内反と外反を伴う膝を中心とした下腿の内・外旋 出典:一般社団法人 日本脳卒中学会ホームページ(accessed: 2019-01-03) (http://www.jsts.gr.jp/guideline/352.pdf より一部引用 )
Brs. の検査は,通常 Stage III から実施され,動作に支障がなければ Stage IV,動 作が不可能であれば Stage II へ移行する.本実験の被験者の Brs. 情報を Table 2-4-1 に示す. Table 2-4-1 被験者情報 A B C D E F G Average 59 45 67 43 64 76 49 57.6 52.2 68.2 57.1 70.5 65.7 66.8 61.1 63.1
U/E IV III III III V III IV
finger V III II III IV III III
L/E IV IV IV III V IV IV I J K L M N Average 22 22 24 24 28 62 30.3 67.4 56.7 67.9 55.0 54.7 80.0 63.6 Age Weight [kg] I (severely) < II < III < IV < V Volunteer ID
※Level of spasticity of upper extremity (U/E), finger, lower extremity (L/E) Patient ID
Age Weight [kg] Brs
31
2.4.2 条件
歩行実験で使用する装具は,義肢装具士が被験者ごとにオーダーメイド で製作したものを使用した.歩行実験をおこなうにあたり歩幅と歩調(以下,ケ ーデンス)を決定する必要がある.本実験では健常者と片麻痺者で力学的荷重の 比較をおこなうため,片麻痺者の歩行に合わせて健常者の歩行を決定すること とした.片麻痺者には 2.3.2 項で説明した歩行路での歩行をおこない,その様子 を HD ビデオカメラ(HDR-XR500V, Sony Corporation, Tokyo, Japan)で撮影し, 歩容解析をおこなうことで歩幅とケーデンスを求めた.その結果,歩幅 30 cm, ケーデンス 80 であったため,健常者の歩行実験においても同条件に設定した. データの収録周波数は 1000 Hz に設定した.2.5 実験方法
各被験者には立脚相分析用装具を装着した状態で,歩行路の歩行をおこ なった.歩行回数は原則 5 回とした.その一方で,片麻痺者においては身体の安 全と体調を最大限に考慮し歩行回数を適宜変更した.すべての歩行実験は HD ビ デオカメラを用いて撮影をおこなった.2.6 実験結果
被験者ごと,グループごとに立脚相の平均をまとめたものを Table 2-6-1 に示す.健常者 1 名の歩行実験における歩容の写真を Fig.2-6-1 に,床反力のグ ラフを Fig.2-6-2 に示す.このグラフの破線が爪先の床反力を示し,実線が踵の 床反力を示す.約 7 秒付近で歩行が開始され 9 秒手前で踵接地(Fig.2-6-1:Frame2) が生じることで床反力が増加し,次いで爪先の床反力が増加していることがわ かる.また爪先の床反力が増加するに連れて踵の床反力が減少する傾向が見ら れた(Fig.2-6-1:Frame7).このことから,本実験で用いる立脚相の定義として, 踵が接地した状態(つまり踵の床反力増加直後)から爪先が離床する直前(爪先 の床反力が最下点を示すまで)までの区間とした.この定義に基づき Fig.2-6-2 から定常状態の 1 歩行周期のうちの 1 立脚相を切り出したものを Fig.2-6-3 に示 す.このグラフより,立脚相は 10.083 秒から 11.083 秒までの約 1.0 秒間である ことがわかる.次に,片麻痺者 1 名の歩行実験における歩容の写真を Fig.2-6-4 に,床反力のグラフを Fig.2-6-5 に,立脚相を切り出したものを Fig.2-6-6 に示す. このグラフから 1 立脚相は 13.55 秒から 14.45 秒までの約 0.9 秒間であることが わかる.1 立脚相の定義に倣い切り出しをおこなったが,被験者ごとでは 0.88532
秒~1.173 秒の間で約 0.3 秒のばらつきがあり,健常者と片麻痺者それぞれの平 均では約 0.7 秒と大きな差がある.また本研究では身体から装具に作用する力学 的荷重を計測するため,被験者の体重による影響も大きいと考えられる.そこで, Marks S. Redfern et al. [文献 2-14] および Rakié Cham et al. [文献 2-15] の手法に基 づき個人差の影響を取り除いた状態での比較検討をおこなうため,1 立脚相を 100%とする処理(以下,時間正規化)と,力学的荷重を被験者の体重で除算す る処理(以下,体重正規化)をおこなった. 本実験で使用した立脚相分析システムは,搭載したすべてのセンサのデ ータは時間的に同期しているという特徴を持つ.つまり,床反力計測装置で収録 した床反力計のデータから立脚相と遊脚相を識別することで,床反力計以外の センサすべてのデータで,立脚相と遊脚相を切り分けることができる.立脚相の グラフを作成する際,立脚相開始直後の力学的荷重を基準としグラフ化した. 健常者の腓腹部に作用した力学的荷重のグラフを Fig.2-6-7 に,片麻痺者 グラフを Fig.2-6-8 にそれぞれ示す.Fig.2-6-7 の(a)~(c)と,Fig.2-6-8 の(a)~(c)それ ぞれは歩行時の進行方向に対して (a)上下方向荷重 Fxc,(b)左右方向荷重 Fyc, (c 前後方向荷重 Fzc,を示す.これらのグラフから,健常者,片麻痺者ともに (a) 上下方向荷重 Fxc と (b)左右方向荷重 Fxc の荷重変化は立脚相を通じて比較的小 さいことがわかる.一方で,両群の (c)前後方向荷重は底屈方向から背屈方向ま で大きく変化していることがわかる.それぞれの荷重を比較すると,(a)上下方 向荷重 Fxc について,健常者(Fig.2-6-7a)では立脚相前期(0%)から中期(50%) にかけて正方向に 0.15 N/kg の荷重が作用しているが,中期(50%)から後期 (90%)にかけて-0.15 N/kg の負方向に遷移していることがわかる.その一方 で,片麻痺患者(Fig.2-6-8a)については,立脚相前期(0%)から中期(60%) にかけて正方向に 0.3 N/kg と大きな荷重が作用していることがわかるが,中期 (60%)から後期(100%)にかけて減少しほぼ 0 N/kg となることがわかる.ま た片麻痺者の場合,立脚相前期の力学的荷重の最大値は健常者より約 2 倍程度 大きくなる傾向が見られた. (b)左右方向荷重 Fyc について,健常者,片麻痺者とも左足接地中は負方 向の力,つまり進行方向に対して左側(外側)の荷重が作用していることがわか る.健常者(Fig.2-6-7b)では,立脚相前期(30%)で約-0.36N/kg の荷重が作 用し,片麻痺者(Fig.2-6-8b)でも同様に立脚相中期(30%)で-0.22 N/kg の荷 重が作用するが,その大きさは健常者と比較して約 60%程度に留まる結果とな った. (c)前後軸荷重 Fzc について,このパラメータでは荷重が大きくなる (正方向)につれて底屈方向荷重が大きく,荷重が小さくなる(負方向)につれ て背屈方向荷重が大きくなることを意味する.両被験者群で立脚相前期では正
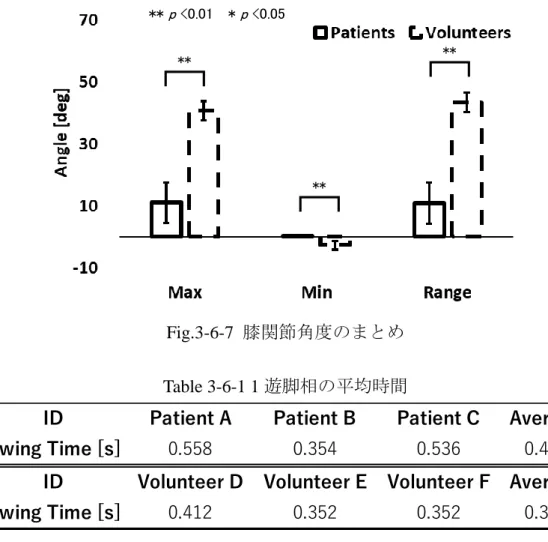
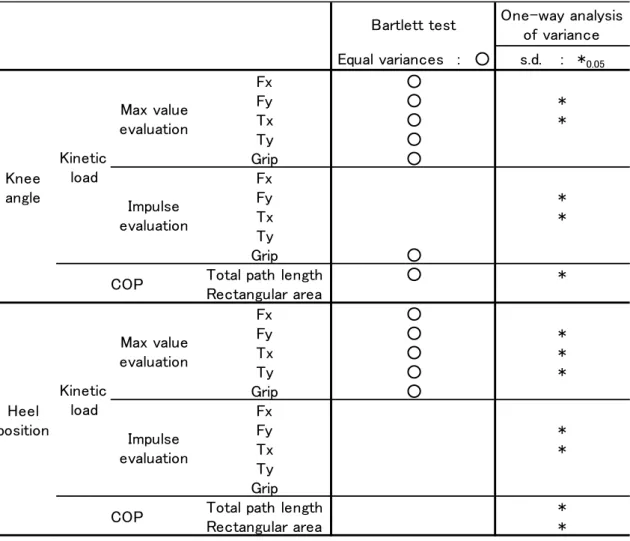
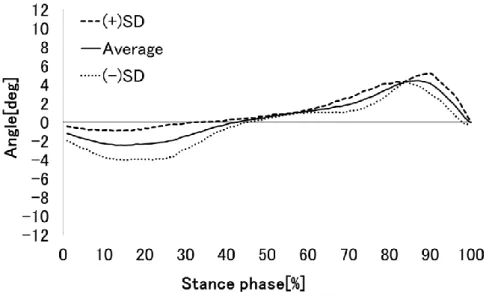
33 方向荷重(以下,底屈方向荷重)が作用し,立脚相後期にかけて負方向荷重(以 下,背屈方向荷重)事がわかる.健常者(Fig.2-6-7c)では立脚相前期で最大底屈 方向荷重である約 0.28 N/kg が作用し,その後背屈方向荷重となり立脚相後期で -1.15 N/kg をとる.片麻痺者(Fig.2-6-8c)では最大値,最小値を取るタイミン グは健常者とほぼ同じであるが,その大きさは底屈方向荷重で約 0.34 N/kg と健 常者より 20%大きいが,背屈方向荷重では-0.74 N/kg と健常者の 64%にとどま る結果となった. Figure 2-6-9 に両群の装具足関節の角度変化(θ a)のグラフを示す.この グラフの正方向への移動を底屈方向,負方向への移動を背屈方向としたとき,健 常者,片麻痺差ともに立脚相前期(0~40%)で底屈方向への角度変化が生じ,立 脚相中期(40~70%)で背屈方向角度へ遷移し,立脚相後期(80~100%)で角度 変化は 0 度に収束する傾向が見られた.角度の大きさを比較すると,健常者 (Fig.2-6-9a)では立脚相 20%で底屈角度 0.83 度,立脚相 70%で背屈角度-1.79 度であった.一方で片麻痺者(Fig.2-6-9b)では,立脚相 20%で底屈角度は 0.22 度と健常者の 26%にとどまり,立脚相 70%で背屈角度は-1.24 度と健常者の 69%にとどまる結果となった. Figure 2-6-10 は立脚相中の膝関節の角度変化(θ k)を示したグラフであ る.このグラフの正方向への移動を膝屈曲方向,負方向への移動を膝伸展方向と したとき,健常者,片麻痺者ともに立脚相前期から中期にあたり 0~70%まで膝 角度は 0~-7 度に伸展しているが,立脚相後期 70~100%にかけて大きく屈曲 していることがわかる.その大きさは,健常者(Fig.2-6-10a)で最大 37 度,片 麻痺者(Fig.2-6-10b)で約 15 度と 2 倍以上の差の出る結果となった. 各パラメータの各軸方向の荷重の最大値,最小値とそれらの差(以下, レンジ)を Table 2-6-3 に示す.またパラメータごとのグラフを Fig.2-6-11~Fig.2-6-13 にそれぞれ示す.これらの値を用いて,健常者と片麻痺者間で 2 群の比較 検定をおこなった.小林[文献 2-16]の手法を参考に正規性を調査し,正規性が認 められた場合は Student の t 検定,正規性が認められない場合にはウェルチの t 検定をそれぞれ用いた.その結果,腓腹部に作用する荷重(Fig.2-6-11)につい て,底屈方向荷重では,片麻痺者は健常者の荷重より有意(p <0.05)に大きくな る傾向が見られたが,背屈方向荷重において片麻痺者は健常者より有意(p <0.01) に小さくなる傾向が見られた.その一方で,荷重のレンジでは被験者群間で有意 な差は見られなかった.足関節角度(Fig.2-6-12)について,片麻痺者の底屈方 向の角度変化は健常者と比較して有意に(p <0.05)小さくなる傾向が見られ, 背屈方向の角度変化および角度変化のレンジでも健常者より有意(p <0.01)に 小さくなる傾向が見られた.膝関節角度(Fig.2-6-13)について,膝関節屈曲で は片麻痺者は健常者より有意(p <0.01)傾向が見られたが,一方で膝関節伸展
34
では差は見られない結果となった.膝関節角度のレンジでは片麻痺者が健常者 より有意(p <0.01)に小さくなる結果が得られたが,伸展角度は同程度の変化 でありながら屈曲角度に 2 倍以上の差があることから,膝屈曲角度がレンジの 検定結果に影響が見られた.
35 (1) Frame 1 (2) Frame 2 (3) Frame 3 (4) Frame 4 (5) Frame 5 (6) Frame 6 (7) Frame 7 (8) Frame 8 Fig.2-6-1 健常者歩行の連続写真
36
Fig.2-6-2 健常者歩行の床反力(1 試行)
37 (1) Frame 1 (2) Frame 2 (3) Frame 3 (4) Frame 4 (5) Frame 5 (6) Frame 6 (7) Frame 7 (8) Frame 8 Fig.2-6-4 片麻痺者歩行の連続写真
38
Fig.2-6-5 片麻痺者歩行の床反力(1 試行)
39
(a) 上下方向荷重(Fxc) (b) 左右方向荷重 (Fyc)
(c) 前後方向(底背屈方向)荷重 (Fzc) Fig.2-6-7 健常者の腓腹部に作用する力学的荷重
40
(a) 上下方向荷重(Fxc) (b) 左右方向荷重 (Fyc)
(c) 前後方向(底背屈方向)荷重 (Fzc) Fig.2-6-8 片麻痺者の腓腹部に作用する力学的荷重
41
(a) 健常者(θa) (b) 片麻痺者(θa) Fig.2-6-9 足関節角度 (a)健常者(θk) (b) 片麻痺者(θk) Fig.2-6-10 膝関節角度 Fig.2-6-11 腓腹部荷重のまとめ ** p <0.01 * p <0.05 * **
42 Fig.2-6-12 足関節角度のまとめ Fig.2-6-13 膝関節角度のまとめ ** ** * ** p <0.01 * p <0.05 ** p <0.01 * p <0.05 ** ** **
43 Table 2-6-1 被験者群ごとの立脚相時間 Table 2-6-2 底背屈方向荷重と角度のまとめ
2.7 考察
両群の底背屈方向荷重の波形と装具足関節の角度波形を比較すると,底 屈方向荷重が最大となるとき,装具の底屈方向の角度変化は最も大きくなり,背 屈方向荷重が最小値を示すとき装具足関節の背屈方向角度変化は最も大きくな る.このことから,装具足関節の角度変形は,装具腓腹部に作用する力学的荷重 と相関性があることが示唆された(Fig.2-7-1).このことは装具装着歩行を行う 上で想像に難しくないことであるが,本実験を通じて装具に作用する荷重計測 することにより力学的根拠を示すことができたと考える. 底屈方向荷重の応答期の差について,健常者では立脚相 14%で底屈方向 荷重が最大となり,24%で背屈方向荷重へと向きを変えている.一方,片麻痺者 では立脚相 15%で底屈方向荷重は最大となるが,背屈方向への遷移は 41%と健 常者より 1.7 倍も底屈方向荷重の応答期が長いことが示された.両群とも踵接地 直後に底屈方向荷重が作用する点は共通しているが,健常者の場合は遊脚相に 向けた蹴上げ動作に備え随意的に背屈方向荷重を与えていると考える.一方で 片麻痺者の場合は麻痺により随意運動が大きくなく,装具支持に頼る歩行をお こなっていることから応答期に差が出たと考えられる.背屈方向荷重について 健常者と片麻痺者を比較すると,健常者の応答期は片麻痺者より 1.3 倍長く,荷 重も 1.6 倍大きく作用している.健常者は足関節を自由に底背屈できる一方で, 装具を装着することによりその可動を強く制限されることになる.言い換えれ ば,装具が通常歩行動作の抵抗となっていることから,背屈方向荷重が大きく作 用したと考えられる.なお同荷重の影響により,足関節角度もその大きさに準じ A B C D E G H Average 0.885 0.950 1.057 1.038 0.960 1.173 1.142 1.029 J K L M N O Average 1.135 1.118 1.162 1.110 1.110 1.059 1.100 Patient ID Stance Time [s] Volunteer ID Stance Time [s]Unit [kg] [N/kg] [N/kg] [N/kg] [deg] [deg] [deg] [deg] [deg] [deg]
Volunteers 63.6 0.28 -1.15 1.43 1.18 -2.06 3.24 37.2 -6.8 44.0 Patients 63.1 0.34 -0.74 1.07 0.88 -1.60 2.48 16.3 -7.2 23.5 Max θk Min θk Range θk Contents Min Fzc Range Fzc Max θa Min θa Range θa Weight Max Fzc
44 て変形を伴うことが示唆された. 膝関節角度では,両群で立脚相後期に遊脚相に向けた膝の屈曲運動が計 測された.装具の長さは足底から腓骨頭までであり,膝屈伸運動に制限を与える ことは少ない.そのため,健常者では遊脚相に向けた膝屈曲角度が大きくなった と考えられるが,一方で片麻痺者の場合は麻痺の影響により屈曲角度は大きく なく,また麻痺の程度により屈曲角度の大きさは被験者ごとにばらつきが見ら れたと考えられる. (a) 健常者 (b) 片麻痺者 Fig.2-7-1 装具足関節角度 (θa)と腓腹部荷重(Fzc)の関係
45
2.8 結言
立脚相分析システムを用いて歩行実験をおこなうことにより,これまで 未知であった装具に作用する力学的荷重および装具の変形状態を計測すること が可能となった.同装置を用いて健常者と片麻痺者の両群で,装具腓腹部に作用 する底背屈方向荷重および足関節,膝関節角度を比較することで,底背屈方向荷 重と足関節角度との相関性を明らかにすることができた.また,荷重の応答期お よびその大きさから,片麻痺者が装具からどの程度の支援を受けているのかを 定量的に知ることができるようになった.本実験では片麻痺者の平均荷重は底 屈方向で 0.34 N/kg,背屈方向で 0.74 N/kg であった.このような定量的な荷重デ ータは,著者らの提案する設計システムの③有限要素解析によるシミュレーシ ョンの荷重設定に欠かす事ができないデータである.一方で,健常者の歩行では 装具装着により背屈方向荷重は片麻痺者より大きくなっていることから歩行動 作を大きく制限していることが示された.本実験で得られた腓腹部荷重と足関 節の変形角度から,荷重センサを用いることなく荷重を推定できる可能性が示 唆された.これは,高価な荷重センサを用いることなく装具に作用する荷重を推 定できることから,著者らの提案する設計システムの⑤の製作装具の試歩行・評 価において活用できると考える.46
第3章 力学分析 −遊脚相−
3.1 緒言
遊脚相とは足が地面から離れている間のことを言い,加速期(以下,遊 脚相前期),遊脚相中期,減速期(以下,遊脚相後期)から構成される(Fig.3-1) [文献 3-1].歩行動作は遊脚相と立脚相から構成されており,双方が交互に実行 されることにより歩行が実現する.言い換えれば,どちらか一方が実行されない と円滑な歩行が成立しないことを意味する.これは装具を装着した歩行動作の 構成要素についても同様である.前章では歩行立脚相中に作用する荷重データ の獲得および分析について述べた.一方で,遊脚相についての力学的荷重を計測 することは困難であり,またこれらの荷重データを調査した研究はほぼ皆無で ある.片麻痺者の歩行において,下垂足が生じるのは遊脚相中であり,下垂足と ならないよう装具がどの程度支援しているかは設計の重要なポイントである. 本章では SHB モデルの装具を用いて遊脚相中の力学的荷重を計測でき る装置を開発した.同装置を用いて健常者と片麻痺者で歩行実験を実施し,遊脚 相中に下肢から装具に作用する力学的荷重分析および装具足関節,膝関節の角 度分析について報告する. 遊脚相後期 遊脚相中期 遊脚相前期 Fig.3-1 遊脚相の各フェーズ47
3.2 実験装置
2 章で製作した立脚相分析システムを使用した場合,床反力計は装具の 外側足底に取り付けているため,遊脚相中に下肢(特に足底)から装具に作用す る力学的荷重を直接計測することは困難である.そこで,遊脚相中でも力学的荷 重の計測を可能とする新たな計測システムを開発した.本節ではその詳細につ いて説明する.3.2.1 実験用 Plastic AFO
立脚相分析システムでは,床反力計測用の 6 軸力覚センサを靴底の内部 に設置している.そのため,床反力が生じない遊脚相中では足裏から装具に作用 する力学的荷重を直接計測することは困難である.そこで,立脚相分析システム に 3 つセンサを追加することで,遊脚相中に下肢から装具に作用する力学的荷 重を計測可能なシステムを開発した.歩行遊脚相における力学的荷重分析用計 測システム(以下,遊脚相分析システム)を Fig.3-2-1 に示す.同システムには 装具の内側の足底 2 箇所(爪先部と踵部)に小型の 3 軸力覚センサ(USL08-H6-1kN,Tec Gihan,Kyoto,Japan)をそれぞれ取り付けた(Fig.3-2-1b の青色のセン サ:以下,足底 3 軸センサ). 3 軸力覚センサの詳細を Fig.3-2-2,センサの仕様 を Table 3-2-1,にそれぞれ示す [文献 3-2]. 装具の足底 3 軸力覚センサの設置箇所は,歩行時に足底圧の集中が報告 されている場所[文献 3-3]とし,解剖学的ランドマーク[文献 3-4]を参考に第 2 中 足骨と第 3 中足骨の関節部分,距骨前方(距骨と舟状骨もしくは立方骨の境目) 付近とした.[文献 3-4]から足の骨格図を装具足底と同サイズに印刷出力し装具 に貼付し,足底 3 軸センサの取り付け位置にマーキングをおこなう.マーク同 士を直線で結び,あらかじめ準備しておいた 3 軸力覚センサの印刷物の軸方向 が直線と一致するように貼付する.その後,ボール盤と 4 mm のドリルを用いて 固定箇所 4 箇所に穴あけ加工を施した(Fig. 3-2-3).センサの固定には M4 のネ ジとナットを用いた. 足底 3 軸センサを取りつけただけでは,遊脚相中に作用する力学的荷重 を計測することは困難である.そこで,足を乗せるためのインソールを製作した. 装具に製作したインソールと足底 3 軸センサを取り付けた写真 Fig. 3-2-4 に示 す.構造としては,3 軸センサの受圧部分に M5 のワッシャーを 2 枚重ね,その 上にインソールをのせてネジで固定する設計とした(Fig.3-2-5).ワッシャーが 1 枚の場合,体重によりインソールに歪が生じ受圧部分以外に接触することで正 確な力学的荷重の計測が困難であった.そこで 2 枚重ねにすることでこの問題48 を回避した.またインソール上に直接足を乗せるような状態で装具装着歩行を おこなうと,歩行中被験者の足裏に痛みが生じることが予備実験から判明した. そのため,厚さ 2 mm のスポンジ材を貼付し緩衝材として用いた.ここで足底 3 軸センサのうち,爪先に取り付けた 3 軸センサを爪先 3 軸センサ,踵に取り付 けた 3 軸センサを踵 3 軸センサと表記する. インソールは装具足底内側の爪先部と踵部に 1 つずつ設置した.それぞ れ,厚さ 1.6 mm のガラスエポキシ(銅張積層板 No.35,Sunhayato,Tokyo,Japan) を用いて製作した.インソールのサイズには,靴用のインソール(TZS702,ASICS Corporation,Hyogo,Japan)の形状 3 種類を参考とした.以下に製作手順(I)~ (V)と製作過程 Fig. 3-2-6 を示す. (I) 装具にあったインソールのサイズを選択する ・Size S (23.0 ~ 24.0 cm) ・Size M (24.5 ~ 25.5 cm) ・Size L (26.0 ~ 27.0 cm) (II) インソールと足の骨格画像を足のサイズと等倍サイズで印刷出力し,ガ ラスエポキシに貼り付ける (III) 解剖学的ランドマークをもとに爪先部分と踵部分に分ける ・爪先部分:第 5 中足骨骨頭 ・踵部分 :距骨と舟状骨の境目 (IV) ガラスエポキシを成形する (V) 角にフィレット加工(R10)を施す (VI) 成形したガラスエポキシにφ5 の穴あけと皿ネジ用座ぐり加工を施す ・爪先用インソールの穴位置:重心位置より 10 mm 前方 ・踵部用インソールの穴位置:重心位置 このとき,爪先用インソールの穴の位置を心より 10 mm 前方(爪先側) にしたのは,モーメントによるセンサの破損を防ぐためである 舟状骨と距骨の足背と装具を固定するために用いる足関節ベルトに作 用する力学的荷重(以下,足関節荷重)を計測するために,同部分に小型の 3 軸 力覚センサ(USL06-H5-100N,Tec Gihan Co.,Ltd, Kyoto,Japan)(以下,足関節 3 軸センサ)を取り付けた.足関節に 3 軸力覚センサを取り付けた状態を Fig.3-2-7 に,センサの詳細を Table 3-2-2 に示す[文献 3-5].センサ取り付けのため,エ ポキシパテを用いて足関節形状(湾曲状)に成形した冶具(Fig.3-2-8)を使用し た.この冶具の足関節接触面にはベルクロファスナーを貼付することで,足関節 の位置に固定できる仕組みとなっている.