複数のタブレット端末とポータブルな力覚提示デバイスを
用いた力学の学習支援システム
Learning Support System of Dynamics
using Multiple Tablet PCs and Portable Haptic Devices
山田直輝
1松原行宏
1岡本勝
1Naoki Yamada
1, Yukihiro Matsubara
1and Masaru Okamoto
11
広島市立大学大学院情報科学研究科
1
Graduate School of Information Sciences, Hiroshima City University
Abstract: In this paper, learning support system for physical dynamics (especially impulse) using multiple tablet PCs and portable haptic devices (called as SPIDAR-tablet) is proposed. In this system, the virtual environment constructed and displayed on tablets PCs. Two users using this system can access this virtual environment from each tablet PCs. And by using haptic devices, users can feel various forces (touch force, impulse and so on) in virtual environment. In addition, tablet PCs can share a virtual environment therefore it is expected that proposed system is used for collaborative learning. In the verification, it was confirmed learner’s discrimination threshold on virtual environment. From these result, high limit of power ratio (coefficient of restitution) used in virtual environment is determined as 0.8. And learning experiments using proposed system is performed.
1 はじめに
近年,教育現場でタブレット端末を用いた学習が 急速に普及し始めている.文部科学省の「教育の情 報化」では,タブレット端末などの情報機器を生徒 各自に提供する「一人一台型」による個人学習や協 働学習や一斉学習を行える環境を推進している[1]. またタブレット端末などの ICT は映像教材,自習教 材などのような,学習者と教材の対話による学習に 留まらず,人と人との対話による学習に活用する方 法が期待されている.理科教育では,目的意識を持 ちながら実験・観察を行うことが重要視されており, ICT を利用して自分の思考や判断を他者と共有して 他者の役に立つことで目的のひとつになり得ると考 えられている[2]. また高等学校の学習指導要領に,理数物理の教育 において,“観察,実験などを通して物理学的に探究 する能力と態度を育てるとともに,物理学の基本的 な概念や原理・法則,物理学の果たす役割を理解さ せ,科学的な見方や考え方を養う”とあるように, 実験による学習が重要とされている[3].しかし,実 際には授業時間の都合などで十分に実験が行われな いことがある.そこで, ICT を活用して仮想的な実 験を行う研究やシステムの開発が行われている. dynaSchool では高等学校と連携し,タブレット端末 でのシミュレータを用いた物理学の仮想実験の実践 を行った[4].学生グループ 1 つにつき 1 台のタブレ ット端末を提供し,力学的エネルギーについての仮 想的なシミュレーションを表示させ,仮想環境の変 化について議論させた.実験の結果,力学的エネル ギーについて学生たちがシミュレータを用いて気付 いたことが確認できた.一方,ICT を活用して力や 重さの変化を対象とした力学の実験を行う場合,視 覚的フィードバックによって体験させることは困難 であり,実環境と同様に力覚フィードバックによっ て物理現象を体験させることが重要であると考えら れる.田村らはタブレット端末と組み合わせること ができる安価な力覚提示デバイスの SPIDAR-tablet を開発した[5].SPIDAR-tablet とは,タブレット端末 と組み合わせることでタッチ操作と同時に 2 次元的 な力覚(最大出力:X,Y 方向各 2[N])を学習者に提示 できるデバイスである.この力覚提示デバイスとタ ブレット端末を用いて,檜谷らは学習者による実験 環境の自由設計が可能な仮想滑車実験環境を構築し た[6].このシステムでは,学習者が画面上の任意の 位置に滑車の配置を行うことで滑車の組み合わせの 構築を行い,その滑車の組み合わせに対応した重さ を画面上の糸を引くことにより体験することができ る.また滑車の組み合わせは,配置した滑車の位置 関係から自動的に判断されるため,学習者は滑車の 人工知能学会研究会資料 SIG-ALST-B503-03配置を行うだけで滑車の組み合わせの構築が可能で ある.さらに実物を用いた実験で必要な糸やおもり を取り付ける作業を必要としないため,容易に様々 な滑車の組み合わせにおける糸を引く際の重さを比 較することができる.このように静止した指先に対 して一定の力覚を提示するような,静的な操作上で 学習者が正確に力覚の体験が可能であることは確認 されている.しかし,動いている指先に対して適当 な力覚を提示するような,動的な操作上で正確に力 覚を体験できることはまだ確認されていない.また, タブレット端末と SPIDAR-tablet を用いて個人の学 習者を対象とした初等力学の学習支援システムの研 究は行われているが,複数人の学習者らを対象とし た初等力学の学習支援システムの研究はまだ行われ ていない. そこで本研究では,学習者が仮想環境の動的な操 作と力覚体験が可能な初等力学の学習支援システム を構築する.エアホッケーを題材とした仮想実験環 境を構築することで,跳ね返り係数による壁に衝突 した物体の速度変化を学習できることを目的とする. また複数のタブレット端末と SPIDAR-tablet を用い て,学習者が他の学習者と議論しながら学習できる ように仮想環境の共有を行う.仮想環境の共有によ り,思考や判断や知識を共有し合いながら体験学習 が可能であると考えられる.一方,本システムでは 動 的 な 操 作 と 力 覚 体 験 を 同 時 に 行 う こ と や , PHANToM などの力覚提示デバイスに比べ出力が小 さいことから,被験者が正確に出力を弁別すること が難しい場合があると考えられる.そのため検証で は学習者の弁別閾を確認し,十分に知覚可能な出力 値の比率を確認する.また学習者が本システムの仮 想実験環境を用いて跳ね返り係数による速度変化に ついて知識の変化が生じるか確認する.
2 提案システム
本システムは,複数のタブレット端末と力覚提示 デバイスの SPIDAR-tablet を用いる.複数人の学習 者らが自由に対象物を投射し,動的な操作を行いな がら力覚を体験することで跳ね返り係数による物体 の速度変化と力積の変化を学ぶことを目的とする. そのため摩擦力や風の影響などといった物理現象は 考慮せず,跳ね返り係数の大きさによって物体の速 度変化を体験できるように構築する.2.1 ユーザインタフェースと操作方法
図 1 にタブレット端末の画面に表示されるエアホ ッケーを題材とした仮想実験環境とアイテムの名称 を示す.初期状態ではディスプレイの中心に円形の パックが静止しており,指で接触した箇所に正方形 のマレットが表示される.学習者はドラッグするこ とでマレットを操作でき,マレットをパックに衝突 させることでパックを打つことができる.また,タ ブ レ ッ ト 端 末 の 上 部 に は 力 覚 提 示 デ バ イ ス の SPIDAR-tablet を装着している.打たれたパックは直 線運動を開始し,同時に衝突したマレットに生じる 力積を SPIDAR-tablet によって擬似的に体験できる. 図 2 では静止したパックを右の壁に垂直に投げ,跳 ね返ってきたパックを受け取る様子を示す.直線運 動を行っている物体が壁に衝突すると,壁に垂直な 速度成分が跳ね返り係数に比例し,速度は減少する. 本システムでは,仮想環境の壁に向けてパックを打 ち,跳ね返ったパックを受け取ることで,跳ね返り 係数によるパックの速度変化を視覚体験でき,パッ クと衝突したときに生じる力積の変化を力覚体験で きる.またパックの真上にマレットを重ねてからド ラッグを行うと,パックを持ち運ぶことができる. 図 1 左側の上側と下側に存在する「跳ね返り係数 を変更できるボタン」について説明する.ボタンは 「↑」ボタンと「↓」ボタンがあり,ボタン上部に はそれぞれの現在の壁の跳ね返り係数の大きさが表 示されている.「↑」ボタンを押すと跳ね返り係数が 0.1 大きくなり,「↓」ボタンを押すことで跳ね返り 係数が 0.1 小さくなる.学習者はこのボタンを利用 して跳ね返り係数の大きさに応じた跳ね返るパック マレット パック 通信接続ボタン サーバー変更ボタン 跳ね返り係数を変 更できるボタン 相手側の出力値を表示できるボタン 図 1 仮想実験環境 力の体験 パックを打つ 力の体験 (打った時 より弱い) パックを受け取る 1 パックを打つ 2.パックを受け取る 図 2 跳ね返りによる力覚体験の変化タブレット端末 SPIDAR-tablet 視覚情報 力覚情報 図 3 システムの外観と情報通信 の速度の変化を確認できる.このボタンを利用した 学習例については 2.4 で示す. 次に図 1 右下にある「相手側の出力値を表示でき るボタン」について説明する.このボタンを押すこ とにより,他の学習者がパックを受け取ったときに 生じる力積の大きさが表示される.これにより一人 の被験者の体験した知覚と実際の出力を比べること が可能になり,本システムを用いた学習者の弁別閾 を調査することが可能になる.実際にこのボタンを 利用し,本システムを用いた学習者の弁別閾を調査 した実験については 3.1 で示す.
2.2 システムの通信
図 3 にタブレット端末と SPIDAR-tablet を用いた システムの外観を示す.図 1 の右下の「通信接続ボ タン」を押すことで,仮想実験環境の共有が開始さ れ,図 3 のように 2 台のタブレット端末で同一の仮 想実験環境の操作が可能になる.複数人の学習者は この仮想実験環境を操作し,視覚的な情報と力覚的 な情報を共有することができる.このような仮想実 験環境の共有から,学習者が体験した知識や発見を 他の学習者に議論しながら学習できると考えられる.2.3 システム構成
タブレット端末と SPIDAR-tablet を用いたシステ ム構成図を図 4 に示す.仮想実験環境は位置情報を 保存する「位置情報入出力部」,速度を設定する「物 理運動設計部」,パックが他の物体と衝突した時に生 じる計算を行う「接触処理部」,また他のタブレット で同一の仮想実験環境を操作が可能にするために仮 想実験環境の情報をつなぐ「通信部」から構成され ている.「位置情報入出力部」はパックとマレットの 位置情報を保存している.学習者がタッチパネルを 接触することでマレットの位置情報が更新される. 「物理運動設計部」は保存されたマレットの位置と 衝突直前の時間経過からマレットの速度計算を行っ 入出力インタフェース 仮想実験環境 反力デバイス (SPIDAR-tablet) ディス プレイ タッチ パネル 位置情報入出力部 通信部 物理運動設計部 接触処理部 図 4 システム構成図 ている.また,仮想実験空間内のパックの速度計算 の結果を「位置情報入出力部」に送り,パックの速 度によって「位置情報入出力部」のパックの位置情 報が常に更新される.「接触処理部」はパックとマレ ットの位置が重なることで働き,「物理運動設計部」 のマレットの速度とパックの速度から衝突後のパッ クの速度を計算し,衝突した時に生じる力の大きさ を力覚提示デバイスに送る.「接触処理部」はパック が壁かマレットに衝突した場合に呼び出される.壁 に跳ね返ることによって跳ね返り係数が生じパック の速度が変化するため,「接触処理部」ではパックの 速度計算を行う.「通信部」では,一台のタブレット 端末が計算した情報を他のタブレット端末に送信し, 同一の仮想実験環境を共有する.2.4 システムを用いた学習例
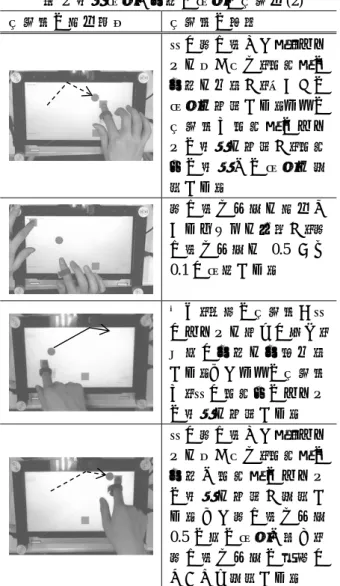
提案システムを用いた学習例について説明する. 表 1,2 では,二人の学習者らが跳ね返りによる物体 の速度変化と力積の変化を体験して,体験した情報 を共有して学習を進めている様子を示す.学習者ら は跳ね返り係数を変更することでパックの速さやパ 表 1 速度変化と力積の変化の学習例(1) 学習者の操作環境 学習者の状況 初期状態の跳ね返り係 数は 0.5 である.片方の 学習者が壁にパックを 斜めに打ち,同時に力積 を力覚体験する.また二 人の学習者は,壁に衝突 前のパックの速度を確 認する.表 2 速度変化と力積の変化の学習例(2) 学習者の操作環境 学習者の状況 壁に跳ね返った後,パッ クを受け取り,衝突後の 力積を体験し,大きさの 変化を確認する.二人の 学習者は衝突後のパッ クの速度を確認し,衝突 前の速度との変化を議 論する. 跳ね返り係数を操作で きるボタンを利用し,跳 ね返り係数を 0.5 から 0.1 に変更する. 再び,片方の学習者が壁 にパックを斜めに打ち, 同時に力積を力覚体験 する.また二人の学習者 は,壁に衝突前のパック の速度を確認する. 壁に跳ね返った後,パッ クを受け取り,衝突後の 力積と衝突後のパック の速度を確認し議論す る.また跳ね返り係数 0.5 の時の変化と比べ, 跳ね返り係数の影響に ついても議論する. ックを受け取ったときの力積がどのように変化する か体験できる.
3 検証実験
3.1 本システムにおける弁別閾の検証
本システムでは画面上で操作と力覚体験を行うこ とや力覚提示デバイスの最大出力が 2[N]であること から,被験者が正確に力覚を弁別することが難しい と考えられる.そこで本実験では,仮想空間の状況 の変化と体験する力覚の大きさの変化に対する学習 者の弁別閾を検証する.実験では被験者 12 人(A, B, C, D,E, F, G, H, I, J, K, L)を 6 組(2 人 1 組)に分け, 6 組のグループで弁別実験を行った.グループを決 めた後,パックを打つ側か受け取る側に役割を分担 させ,受け取る側の学習者だけに「相手側の出力値 を表示するボタン」を利用してもらい,投げる側の 被験者だけが相手(受け取る側の被験者)の体験し た力の大きさを確認できる環境で行った.役割を決 定した後,被験者にはシステムの操作方法を説明し た.説明後に操作に慣れてもらった後,受け渡しを 2 回行わせた.受け渡しとは,静止中の受け取る側 に打つ側がパックを投げ,受け取る側に当てるまで の一連の動作を示す.2 回の受け渡し後,受け取っ た側の被験者に 1 度目に体験した出力と 2 度目に体 験した出力を比べさせ大きさがどのように変化した か回答を得た.回答の方法は「大きくなった」,「小 さくなった」,「わからない」の 3 種類で答えてもら った.また「わからない」と答えた場合は,理由に ついても確認した.回答の正誤判定は,打つ側の仮 想実験環境に実際の出力値を表示させ,受け取る側 が回答した大きさの変化と比較することで行った. 被験者が正しい回答をした場合は「正」,間違えた回 答は「誤」,わからない場合は「不明」としている. この試行が 30 回行われた後,打つ側と受け取る側を 交代して,同様の実験を行った. 図 5 は出力値の変化に対する被験者の回答マーカ 360 個(12 人×30 試行)を示す.横軸はシステムに より被験者に提示された 1 度目の出力値,縦軸は 2 度目の出力値を示す.また図 6, 7, 8 は,図 5 のデー タの中から被験者が正解した場合,間違えた場合, わからなかった場合のそれぞれの回答を取り出し, 被験者ごとに散布図のマーカを変更したものである. 図 5, 6 から,1 度目と 2 度目の出力値がある程度の 差があれば,被験者が正確な回答をできていること が見られた.一方,図 7 より,被験者が間違えた場 合は図の対角線付近(1 度目と 2 度目の差がほぼな い場合)に集まりやすいことを確認できた.また図 8 では,図の対角線付近に多く散布されていること が確認できるが,これは被験者が大きさに変化をほ ぼ感じなかったため「わからない」と回答したと考 えると,正しい回答ができているとも考えられる. また,被験者の意見から出力値が約 0.6[N]以下であ ると力を知覚すること自体が難しいことなども確認 できた.さらに対角線付近に「正」のマーカもいく つか散布されているが,これは知覚が安定していな 0.4 0.6 0.8 1 1.2 1.4 1.6 0.4 0.6 0.8 1 1.2 1.4 1.6 二度 目の 受け 取 りの 出力 値 [N ] 一度目の受け取りの出力値[N] 正 誤 不明 図 5 出力値の変化に対する被験者全員の回答0.4 0.6 0.8 1 1.2 1.4 1.6 0.4 0.6 0.8 1 1.2 1.4 1.6 2 度 目 の 受 け取 りの出 力値 [N] 1度目の受け取りの出力値[N] 正(A) 正(B) 正(C) 正(D) 正(E) 正(F) 正(G) 正(H) 正(I) 正(J) 正(K) 正(L) 図 6 被験者が正解だった場合(正)の回答 0.4 0.6 0.8 1 1.2 1.4 1.6 0.4 0.6 0.8 1 1.2 1.4 1.6 2 度 目 の 受 け取 りの 出 力値 [N] 1度目の受け取りの出力値[N] 誤(A) 誤(B) 誤(C) 誤(D) 誤(E) 誤(F) 誤(G) 誤(H) 誤(I) 誤(J) 誤(K) 誤(L) 図 7 被験者が間違えた場合(誤)の回答 0.4 0.6 0.8 1 1.2 1.4 1.6 0.4 0.6 0.8 1 1.2 1.4 1.6 2 度 目 の 受 け取 りの 出 力値 [N] 1度目の受け取りの出力値[N] 不明(A) 不明(B) 不明(C) 不明(D) 不明(E) 不明(F) 不明(G) 不明(H) 不明(I) 不明(J) 不明(K) 不明(L) 図 8 被験者がわからなかった場合(不明)の回答 かったため偶発的に正解した場合や個人差による知 覚の違いなどが原因であると考えられる. 以上のことから,本システムを用いた力積の変化 を体験する実験において,一定の出力差があれば学 習者が力の変化を正確に体験できると考えられる.
3.2 知覚可能な比率の検討
本研究の学習題材は,跳ね返り係数の大きさに応 じて対象物が壁に当たったときに速度が変化するこ 0 20 40 60 80 0 ~ 0 .1 0 .1 ~ 0 .2 0 .2 ~ 0 .3 0 .3 ~ 0 .4 0 .4 ~ 0 .5 0 .5 ~ 0 .6 0 .6 ~ 0 .7 0 .7 ~ 0 .8 0 .8 ~ 0 .9 0 .9 ~ 1 .0 デ ータ数 出力値の比率 正解 誤 不明 図 9 出力値の比率とデータ数 とである.そのため各被験者が十分に弁別可能な跳 ね返り係数を考慮する必要がある.本節では図 5 の 実験結果を用いて,被験者が十分に弁別できると考 えられる出力値の比率について検討する.方法とし て,まず図 5 の各マーカを取り出し,2 つの出力値 を大きい方と小さい方に分ける.次に小さい方の出 力値を大きい方の出力値で割り,その結果の数値を 出力値の比率とする.この比率と取り出したマーカ の正誤判定を記録し,これを全データ 360 個から抽 出した. 実験の結果を図 9 に示す.比率の数値は 0.1 刻み で区切ってあり,その区間に存在するデータの個数 を表示している.図 9 より,各比率間でデータの割 合を確認したところ,被験者は 0.8 以下であればほ ぼ正確に弁別できていることが確認できた. この結果から跳ね返り係数による速度変化や力積 の変化を題材とした学習実験を行う場合,跳ね返り 前後の速度比率が 0.8 以下であれば学習者が正確に 知覚できると考えられる.3.3 知識変化の検証
本検証では,複数人の被験者らに提案システムを 用いることによる知識獲得とその過程について確認 する.本実験では大学生,大学院生 8 名を被験者(被 験者 M, N, O, P, Q, R, S, T)として扱い,被験者を 2 人 1 組の計 4 組のグループに分けた.システムを用 いた実験を始める前に,まず各被験者一人一人に対 し事前テストを行った.事前テストでは跳ね返り係 数による速度変化についての問題を提示した.この 問題は,壁に対し円形の物体を図の方向(矢印の向 き)および速度(矢印の長さ)に投げたときに,壁 に衝突したあとの物体の進む方向および速度として 問うものである.壁の跳ね返り係数は 0.5,摩擦力や 風の影響はないものとしており,物体の速度は跳ね 返り係数のみによって変速する.事前テストの終了 後,被験者らに 2 人 1 組でシステムを操作してもらい,学習者がどのように気付いていき,知識が変化 したきっかけを確認した.システムでは壁の跳ね返 り係数が操作できるボタンがあるため,被験者らは 跳ね返り係数の大きさに応じた物体の速度変化を確 認することが可能である.システム操作後,被験者 らに跳ね返り後の物体の方向および速度はどのよう に変化するか確認した.これらの事前,事後テスト は全て跳ね返り係数を 0.5 としている. 実験の結果,事前テストで誤っていた被験者は M, O, Q, S であった.被験者 M, O, Q, S らの事前テス トと事後テストの結果を表 3 に示す.表 3 より,シ ステム操作後の事後テストでは,被験者 S 以外の被 験者は跳ね返り係数による速度変化の正しい知識を 獲得できたことを確認できた.一方,被験者 S は壁 に垂直な速度成分が跳ね返り係数に比例することま では理解できなかったが,壁に平行な速度成分が変 化しないことと垂直成分が減少することについては 体験できたことを確認した.他の被験者らは跳ね返 り係数が壁に垂直な速度成分に比例することも理解 できたが,これは跳ね返り係数の操作を行いながら 速度の減少率を確認し続けることで導き出せたから であると考えられる. またシステム操作実験では,システム操作による 被験者同士の情報共有や自らの気付きにより知識変 化が起きたことだけでなく,片方の学習者がもう片 方の学習者に指摘をすることにより学習が効率よく 行われることも確認した.一方,パックを投射した ときに生じる力積については,被験者が体験しやす い場合とそうでない場合があった.壁に垂直方向に 表 3 誤った被験者のシステム操作前後の知識 被験者 事前テスト 事後テスト M O Q S 投げた場合,パックを投げた場合に生じる力積と受 け取った時に生じる力積の差は被験者全員が体験で きたことは確認できた.しかし斜めに投げた場合, パックを投げた場合に生じる力積と受け取った時に 生じる力積の差が小さすぎてわからないと答えた被 験者が多かった.このことから,力積の変化の学習 も行う場合,3.1 で求めたような弁別閾内で打つよう に制約する必要があると考えられる. これらの結果から,本システム用いて学習者らが 情報を共有し合うことで,跳ね返りによる物体の速 度変化の知識獲得の可能性があると考えられる.