Shape optimization of corrosion using temperature history observed on reinforcement concrete based on the adjoint variable
and the finite element methods
Takahiko KURAHASHI*
Nagaoka University of Technology 1603-1 Kamitomioka, Nagaoka, Niigata, Japan
Email:[email protected]
Takumi KUROSAWA
Graduate School of Nagaoka University of Technology 1603-1 Kamitomioka, Nagaoka, Niigata, Japan
Email:[email protected]
Hideki OSHITA Chuo University
1-13-27 Kasuga, Bunkyou, Tokyo, Japan Email:[email protected]
Kotaro MARUOKA
Graduate School of Nagaoka University of Technology 1603-1 Kamitomioka, Nagaoka, Niigata, Japan
Email:[email protected]
Tetsuro IYAMA
Nagaoka National College of Technology 888 Nishikatakai, Nagaoka, Niigata, Japan
Email:[email protected]
Summary
In this study, we present the shape estimation problem of reinforcement corrosion in concrete using the observed temperature on concrete surface based on the optimal control theory, i.e., the adjoint variable method, and the finite element method. The investigation of the dependency of the corrosion shape for the computational condition by changing the initial corrosion length was carried out in this study.
Keywords:Shape Determination of Corrosion, Adjoint Variable Method, Stationary Condition, Lagrange Function, Time History of Observed Temperature, Finite Element Method.
1 Introduction
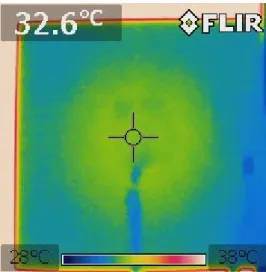
It is known that if there is defect, i.e., the cavity, the corrosion and etc., in the structure and the structure is heated from the bottom surface, and the upper surface of the defect become to difference temperature comparing to the case without the defect (See Figure 1). However, the shape of the defect can not be directly determined by the observed temperature data on the structure. Therefore, in this study, the inverse analysis is carried out to estimate the appropriate corrosion shape such that computed temperature is close to
the observed temperature at the target point on the concrete surface in three-dimensional domain.
If the inverse problems are solved, the sensitivity
equation method[1] and the adjoint variable
method[2],[3],[4] , i.e., the optimal control theory, are
frequently employed. In case that the number of the
unknown parameters in the inverse problem is few, the
sensitivity equation method is suitable. On the other
hand, if there are a lot of the unknown parameters the
adjoint variable method is suitable for the inverse analysis.
Figure 1: Heat image in case that there is defect in center of structure
Figure 2: Image diagram of the shape determination of defect
In this study, the adjoint variable method is applied to solve this problem, because it is necessary to compute a lot of unknown parameters which is equivalent to the number of the coordinates at all nodal points on the corrosion surface. The finite element method is applied to simulate the temperature distribution in the concrete. In this study, the numerical experiments are carried out to investigate the influence of the initial corrosion length in the inverse analysis for the final corrosion shape obtained by iterative computation. The image diagram of the shape determination of defect is shown in Figure 2.
2 Test example for non-destructive inspection based on temperature measurement
Figure 3 indicates the photo of experiment. There is test piece on the heater, and time history of temperature is measured on the top of the test piece. The drawing of the test piece is shown in Figure 4. The test piece consists of the resin, and there is a cavity at center of test piece. The size of the test piece is 100mm × 100mm × 20mm.
The experiment was carried out under the condition that the temperature on heater is set 50degs. The measurement
Figure 3: Photo of experiment
Figure 4: Drawing of test piece
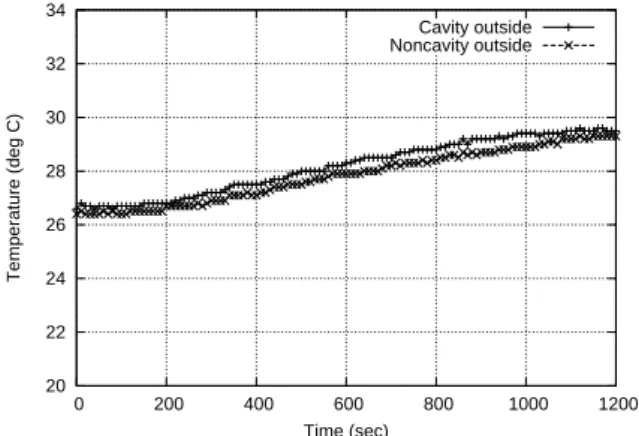
points A and B are illustrated in Figure 5. Figures 6 and 7 indicate the time history of temperature at points A and B, respectively. It is found that the highest temperature is obtained in case that there is a cavity in the test piece (See Figure 6.) From this result, it can be said that the temperature on top of the teat piece is changed if there is defect in the test piece.
3 Shape determination analysis of reinforcement corrosion based on adjoint variable and finite element methods
3.1 Heat transfer analysis based on FEM
The finite element analysis is carried out to calculate the temperature distribution on the concrete surface. Figure 8 shows the computational model and the boundary definition. Γ 1 and Γ 2 denote the boundaries on which the temperature and the heat flux are respectively given, and Γ cont. indicates the surface boundary of the reinforcement corrosion.
The heat transfer equation shown in Equation (1) is employed in this study.
ρ c ˙ φ − κφ ,ii = 0 (1)
Figure 5: Location of measurement points on upper surface
20 22 24 26 28 30 32 34
0 200 400 600 800 1000 1200
Temperature (deg C)
Time (sec)
Cavity inside Noncavity inside
Figure 6: Time history of temperature on resin surface at point A
where ρ is the density, c is the specific heat, κ is the thermal conductivity, φ is the temperature. The initial and the boundary conditions are defined as Equations (2) - (4).
φ (t 0 ) = φ ˆ 0 in Ω (2)
φ = φ ˆ on Γ 1 (3)
b = κφ ,i n i = ˆb on Γ 2 (4) where n i denotes the cosine of the unit outward normal of the boundary, b denotes the heat flux.
The finite element formulation using the tetrahedron element is applied to compute the heat transfer equation.
The finite element equation is consequently derived as shown in Equation (5).
ρ e c e [M e ] { φ ˙ e } + κ e [H e ] { φ e } = { T e } in Ω e (5) where [M e ], [H e ] and { T e } represent the matrices and vector shown in Equations (6) - (8).
[M e ] =
∫ Ω
e{Φ e }{Φ e } T dΩ (6)
20 22 24 26 28 30 32 34
0 200 400 600 800 1000 1200
Temperature (deg C)
Time (sec)
Cavity outside Noncavity outside
Figure 7: Time history of temperature on resin surface at point B
Figure 8: Computational model and boundary definition
[H e ] =
∫ Ω
e{Φ e,i }{Φ e,i } T dΩ (7) { T e } =
∫ Γ
e{Φ e } ( κφ ,i n i ) e dΓ (8) If the finite element equations for each elements are superposed based on the connectivity conditions for each elements, the finite element equation for the computational domain Ω is derived as Equation (9).
[A] { φ ˙ } + [B] { φ } = { C } in Ω (9) where [A], [B] and { C } denote the matrices and vector obtained by the superposition of the matrices and the vector shown in Equations (6) - (8).
3.2 Definition of Lagrange function
The corrosion shape is estimated by the solving the
minimization problem of the functional. The functional
is referred to as the performance function, and is defined
by the square sum of the residual between the computed
and the observed temperature on the concrete surface. The performance function is written as Equation (10).
J = 1 2
∫ t
ft
0{ φ − φ obs. } T [R] { φ − φ obs. } dt, (10) where [R], φ and φ obs. denote the weighting diagonal matrix, the computed and the observed temperature. Introducing the state equation shown in Equation (9), the Lagrange function is derived as Equation (11).
J ∗ = J − ∫ t
ft
0{ λ } T ([A] { φ ˙ } + [B] { φ } − { C } )dt, (11) where λ indicates the Lagrange multiplier.
3.3 Stationary Conditions for Lagrange Function The first variation of the Lagrange function is calculated to obtain the stationary condition of the Lagrange function (Equation (12)).
δ J ∗ = ∫ t
ft
0( { δλ } T { ∂ J ∗
∂λ } +
{ ∂ J ∗
∂φ } T
{ δφ } + { ∂ J ∗
∂ C } T
{ δ C } ) dt + { δ x i } T { ∫ t
ft
0∂ J ∗
∂ x i
dt }
=
∫ t
ft
0( { δλ } T (
− [A] { φ ˙ } − [B] { φ } + { C } ) +
( { λ ˙ } T [A] − { λ } T [B] + { φ − φ obs. } T [R]
) { δφ }
+ { λ } T { δ C } ) dt +
{ λ (t f ) } T
{ δφ (t f ) }
− { λ (t 0 )
} T
{ δφ (t 0 ) } + { δ x i } T { ∫ t
ft
0∂ J ∗
∂ x i
dt }
. (12) As the gradient vector of the Lagrange function with respect to the Lagrange multiplier and the state variable, Equations (13) and (14) are obtained.
{ ∂ J ∗
∂λ }
= − [A] { φ ˙ } − [B] { φ } + { C }
= − ([A] { φ ˙ } + [B] { φ } − { C } )
= { 0 } in Ω t ∈ [t 0 , t f ]. (13)
{ ∂ J ∗
∂φ }
= [A] T { λ ˙ } − [B] T { λ } + [R] T { φ − φ obs. }
= { S } in Ω t ∈ [t 0 ,t f ]. (14) Equations (13) and (14) indicate the finite element equation for the heat transfer equation and the adjoint equation. Moreover, considering the variation of the initial and the boundary condition for the state variables, the
terminal and the boundary conditions for the Lagrange multiplier is obtained as shown in Equation (15).
λ (t f ) = 0 in Ω , λ = 0 on Γ 1 ,
s = 0 on Γ 2 . (15)
The full implicit scheme is employed as the temporal discretization technique for the heat transfer finite element and the adjoint equations, and the element by element conjugate gradient method is applied to solve Equations (13) and (14).
In addition, the gradient of the Lagrange function with respect to the coordinates is obtained as Equation (16).
∂ J ∗
∂ x i
= { ∫ t
ft
0{ λ } T ([ ∂ A
∂ x i
] { φ ˙ } + [ ∂ B
∂ x i
] { φ }
− { ∂ C
∂ x i
}) dt
}
in Ω. (16)
Using this gradient vector in the steepest descent method, the update equation of the coordinates on the reinforcement corrosion surface can be constructed. The update equation is written as Equation (17).
{ x (l+1) i } = { x (l) i } − [W (l) ] −1 ∂ J ∗
∂ x i (l)
on Γ cont. , (17) where l and [W ] mean the number of iterations and the diagonal matrix by the weighting parameter, and the inverse value of the weighting parameter W which indicates the step length in the iterative computation. The step length is updated based on the Sakawa-Shindo method[5].
The computational algorithm by the iterative procedure is shown below.
1. Set of the initial coordinates { x i (1) } and the convergence criterion ε .
2. Computation of the state equation (Equation (13)).
3. Computation of the performance function J (l) (Equation (10)).
4. Computation of the adjoint equation (Equation (14)).
and computation of the gradient of the Lagrange function with respect to the coordinates (Equation (16)).
5. Update of shape of the reinforcement corrosion (Equation (17)).
6. Check for the convergence ; if | J (l+1) − J (l) | < ε then stop, else go to step 7.
7. Computation of the state equation (Equation (13)).
8. Computation of the performance function J (l+1) (Equation (10)).
9. Update of weighting parameter; if J (l+1) < J (l) then W (l+1) = W (l) × 0.9 and go to step 4, else W (l+1) = W (l) × 2.0 and go to step 5,
In addition, if the iterative computation 1 for the finite element equation for the heat transfer equation and the adjoint equation does not converge, the weighting parameter W is updated to W × 2.0, and the computation returns to the step 5.
4 Computational conditions and numerical experiments for reinforcement corrosion shape determination problem
4.1 Computational conditions
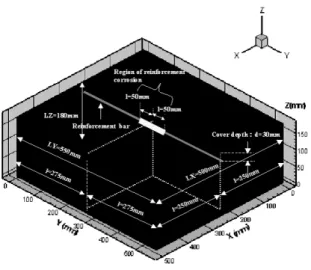
In this study, the computational model shown in Figure 9 is employed. The finite element mesh is shown in Figure 10. The total number of nodes and elements are 242,000 and 1,140,480 respectively.
The computational conditions are shown in Tab.1. In addition, the temperature boundary condition is given on the surface of the reinforcement bar. The temperature is given until T=240 sec., and the Neumann boundary condition, i.e.
the heat flux is equal to zero, is given on the boundary after T=240 sec. (Equation (18)). The boundary condition shown in Equation (19) is given on the concrete surface. The observation point is set at the point, X=0.250m, Y=0.275m, Z=0.180m. The weighting diagonal matrix [Q] is set 1.0 at the observation point, and is set 0.0 at the other points. In addition, the physical constants are shown in Tab.2. ρ , c and κ denote the density, the specific heat and the thermal conductivity.
φ = a × t + φ (t 0 ) on steel surface in t ∈ [0, t 1 ], b = 0 on steel surface in t ∈ (t 1 , t max ], (18) b = h × ( φ − φ ∞ ) on concrete surface in t ∈ [0,t max ].
(19) In this study, the initial corrosion thickness h and the initial corrosion length of L are set 1.0mm and 100.0mm, and the time history of the temperature obtained by the forward analysis is used as the observed temperature 2 .
1
The iterative computation indicates the computation by the element-by-element conjugate gradient method.
2
In Figures 14 and 15, the dot line indicates the computational result obtained by the forward analysis.
Figure 9: Computational model ( X:500mm × Y:550mm
× Z:180mm )
Table 1: Computational conditions
Real time ( t max sec.) 600
Convection coefficient ( h W/m 2 ℃ ) 10.0 Ambient temperature ( φ ∞ ℃ ) 21.3 Time of heating to steel ( t 1 sec. ) 240
Heat up ratio on surface of
reinforcement bar ( a ℃/sec. ) 0.081 Initial temperature in concrete ( φ (t 0 ) ℃ ) 19.5 Total number of nodes 242,000 Total number of elements 1,140,480 Time increment ( ∆t sec.) 5.0
Time steps 120
Convergence criterion ε 10 −6
4.2 Numerical experiments
If the X-Z plane is represented by the polar coordinate system, a term of the first variation ∂ ∂ J x
∗i
δ x i is formulated as Equation (20).
∂ J ∗
∂ x i δ x i = ∂ J ∗
∂ x δ x + ∂ J ∗
∂ y δ y + ∂ J ∗
∂ z δ z
= ∂ J ∗
∂ y δ y + ( ∂ J ∗
∂ x ∂ x
∂ r + ∂ J ∗
∂ z ∂ z
∂ r ) δ r +
( ∂ J ∗
∂ x ∂ x
∂θ + ∂ J ∗
∂ z ∂ z
∂θ ) δθ
= ∂ J ∗
∂ y δ y + ∂ J ∗
∂ r δ r + ∂ J ∗
∂θ δθ . (20)
In Equation (20), the variation δθ is equal to zero in case
that the corrosion shape is assumed as the concentric circle
0 50 100 150
Z(mm)
0 100 200 300 400 500
X (mm) 0
100 200
300 400
500 Y (mm)
X Y
Z
Figure 10: Finite element mesh Table 2: Physical constants Concrete Reinforcement
bar
Reinforcement corrosion ρ
(kg/m 3 ) 2.40 × 10 3 7.85 × 10 3 5.30 × 10 3 c
(J/kg ℃) 1.15 4.70 × 10 −1 1.20
κ
(W/m ℃) 2.70 5.13 × 10 1 6.97 × 10 −2
shape. Therefore, Equation (20) is written as Equation (21).
∂ J ∗
∂ x i δ x i = ∂ J ∗
∂ y δ y + ∂ J ∗
∂ r δ r
= ∂ J ∗
∂ y δ y + ( ∂ J ∗
∂ x
∂ x
∂ r + ∂ J ∗
∂ z
∂ z
∂ r ) δ r
= ∂ J ∗
∂ y δ y + ( ∂ J ∗
∂ x cos θ + ∂ J ∗
∂ z sin θ ) δ r.(21) In this examination, the dependency of the final shape, i.e. the obtained corrosion shape at the final iteration, for the initial corrosion length is investigated. The initial thickness h is given as 2.0mm, and the initial length L are set 80.0mm(Case 1), 100.0mm(Case 2) and 120.0mm(Case 3) respectively.
As the computational results, the variation of performance function for each case is shown in Figure 11.
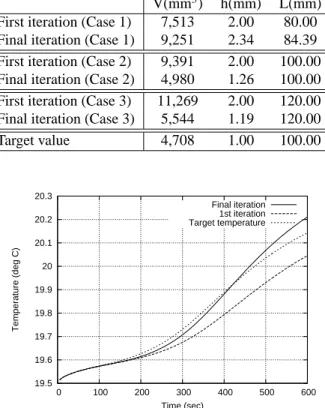
It is seen that the value of performance function converges in all cases. The final shape of the reinforcement corrosion for each cases are shown in Figures 12 13 and 14, and the comparison of volume V , the thickness h and the length L for the reinforcement corrosion is shown in Tab. 3. In Case 2, it is found that the obtained corrosion shape at the final iteration could be close to the target shape (h=1.0mm, L=100.0mm). On the other hand, the final shape could not be close to the target shape in Case 1 and 3. In addition,
0 0.5 1 1.5 2 2.5 3
0 5 10 15 20 25 30 35 40 45 50
Normalized performance function
Number of iterations Case1 : L=80mm Case2 : L=100mm Case3 : L=120mm
Figure 11: Comparison of variation of performance function
X Y
Z
Figure 12: Final shape of reinforcement corrosion (Case 1 : Initial length 80mm)
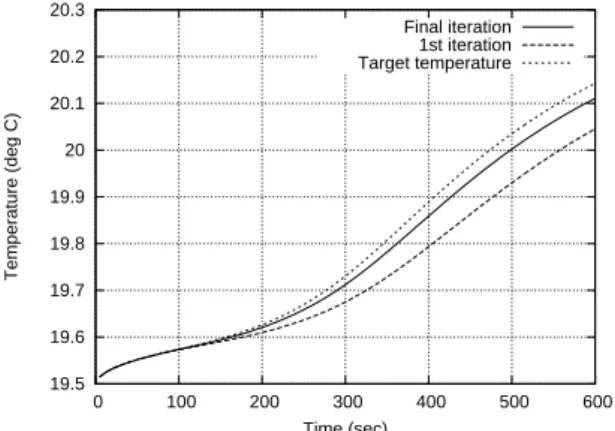
Figures 15, 16 and 17 show the time history of temperature at the observation point for each case. The solid and the broken and the dot lines denote the computed temperature at the final iteration, the computed temperature at the first iteration and the target temperature. It is seen that the computed temperature at the target point is close to the observed temperature in both cases. In this study, it was found that whether the appropriately shape can be obtained depends on the initial shape of the reinforcement corrosion.
According to these results, even if the practical size
of reinforcement corrosion is given as the computational
condition, it is not usual that the computed temperature is
good agreement with the observed temperature. Therefore,
if the computation of corrosion shape determination is
carried out based on methodology shown in this paper,
it is necessary to modify the physical constants such that
the computed temperature is agreement with temperature
observed by infrared sensor.
X Y Z
Figure 13: Final shape of reinforcement corrosion (Case 2 : Initial length 100mm)
X Y
Z
Figure 14: Final shape of reinforcement corrosion (Case 3 : Initial length 120mm)
5 Concluding remarks
In this study, the shape estimation problem of the 3D reinforcement corrosion in the concrete based on the observed temperature on the concrete surface was investigated. The formulation was carried out by using the finite element and the adjoint variable methods.
According to the computational results, the corrosion shape obtained by the inverse analysis depends on the initial shape of the reinforcement corrosion. Therefore, it is necessary to improve the computational algorithm or to change the computational conditions to be able to obtain the appropriate corrosion shape. In addition, it was found that even if correct corrosion length and width is given as computational conditions, there is a possibility computational temperature is not agreement with observed temperature. This result denotes that there is a difference between the temperature observed by infrared sensor and actual temperature on concrete surface.
Table 3: Comparison of computational results V(mm 3 ) h(mm) L(mm) First iteration (Case 1) 7,513 2.00 80.00 Final iteration (Case 1) 9,251 2.34 84.39 First iteration (Case 2) 9,391 2.00 100.00 Final iteration (Case 2) 4,980 1.26 100.00 First iteration (Case 3) 11,269 2.00 120.00 Final iteration (Case 3) 5,544 1.19 120.00
Target value 4,708 1.00 100.00
19.5 19.6 19.7 19.8 19.9 20 20.1 20.2 20.3
0 100 200 300 400 500 600
Temperature (deg C)
Time (sec)
Final iteration 1st iteration Target temperature
Figure 15: Time history of temperature at the observation point (Case 1 : Initial length 80mm)
Therefore, if the methodology shown in this paper is applied to obtain the corrosion shape using practical observed temperature, it is necessary to modify physical constants before computation of corrosion shape determination such as computed temperature is close to temperature observed by infrared sensor.
Acknowledgement
This work was supported by "Program for High Reliable Materials Design and Manufacturing in Nagaoka University of Technology".
References
[1] R.Kreibig, U.Benedix, U.J.Gorke and M.Lindner, Identification and estimation of constitutive parameters for material lows in elastplasticity:
GAMM-Mitt., 30(2), 458-480, 2007.
[2] Y.Ogawa and M.Kawahara, Shape Optimization of Body Located in Incompressible Viscous Flow Based on Optimal Control Theory, Int. J. Comput. Fluid Dyn., 17(4), 243-251, 2003.
[3] H.Yagi and M.Kawahara, Optimal Shape Determination of a Body Located in Incompressible Viscous Fluid Flow: Comput. Meth. in Appl. Mech.
and Eng., 196(49), 5084-5091, 2007.
19.5 19.6 19.7 19.8 19.9 20 20.1 20.2 20.3
0 100 200 300 400 500 600
Temperature (deg C)
Time (sec)
Final iteration 1st iteration Target temperature
Figure 16: Time history of temperature at observation point (Case 2 : Initial length 100mm)
19.5 19.6 19.7 19.8 19.9 20 20.1 20.2 20.3
0 100 200 300 400 500 600
Temperature (deg C)
Time (sec)
Final iteration 1st iteration Target temperature