*1 機械電子研究所
屋外ロボット用力センサの開発
平面コイルを用いた磁歪効果型力センサ
古賀 文隆
*1末廣 利範
*1Development of Force Sensors for Outdoor Robots
Magnetostrictive Effect Type Force Sensor Using Planar Coils Fumitaka Koga, Toshinori Suehiro
アモルファス磁歪箔と一対の平面コイルを積層した新しい構造を持つ力センサを提案,試作し,評価を行った。
一対の平面コイル間の相互インダクタンスは,力(応力)により誘導される磁歪箔の磁気異方性により決定され,
本センサでは機械構成要素に接着された磁歪箔に加わる力の尺度として使用する。本センサはまた,磁歪箔への通 電が不要であることから,平面コイル及びそれに付随する配線が容易に着脱可能であるという特徴を持つ。断面が 15×15mm
2のアルミニウム角棒の側面に接着したMetglas2605SCアモルファス磁歪箔と巻数が16回の一対の平面コイ ルを用いた力センサの基本特性を評価した結果,励磁条件が100kHz,80mAのときに14.1mV/Nmの感度が得られた。
1 はじめに
機械構造物に加わる力を把握する際,最も直接的に 測定可能な物理量であるひずみを測定し,その値から 力を換算する方法がとられることが多い。そのためひ ずみセンサ(ストレインゲージ)は力の測定に多く用 いら れ てい る 。磁 歪 効果 を 利用 す ると 高 感度 な ひず み・力センサが実現でき
1),SIセンサ
2),磁気弾性効 果を用いたひずみセンサ
3),超磁歪薄膜を用いた力セ ンサ
4),及び応力磁気抵抗効果を利用したひずみゲー ジ
5)等が報告されている。我々は主にロボットのマニ ピュレータの各部に加わる力を簡便に検出することを 目的として力センサの開発を行っているが,ロボット 等の被測定物への装着の容易性やメンテナンス作業の 容易性を考慮すると,起歪部を有せずストレインゲー ジのように直に力印加部に装着(接着)するもので,
かつ配線類は容易に着脱可能であることが望まれる。
そこで本稿では,アモルファス磁歪箔と平面コイルを 積層した構造の力センサを提案し,試作及び評価を行 ったので報告する。本センサは,力印加部に固定した アモルファス磁歪箔には通電する必要がなく,コイル 及び配線は着脱可能である。また2個のコイルの相互 誘導を利用するもの
6),7)で,力がゼロのときに出力が ゼロとなる特徴を有している。
2 動作原理
図1に平面コイルの簡略図を示す。平面コイルは,
反対向きの螺旋を持つ2つのコイルを直列接続した構 造を持つ
7)。図2に検出ヘッドの構造を示す。検出ヘ ッドは,一番下に磁歪を有するアモルファス箔,その 上に直交させて配置した2つの平面コイルがあり,一 番上に励磁効率を高めるためのヨークとして用いるア モルファス箔を密着させて重ねた構造になっている。
2つの平面コイルは,一方を励磁コイル,他方を検出 コイルとして使用する。磁歪箔のみを被測定物に接着 し,平面コイルおよびヨークは近接して配置されてい ればよく,必ずしも接着する必要はないことから,コ イルやそれに付随する配線は着脱可能となる。
図 1 平面コイルの簡略図
アモルファスヨーク
平面コイル (上側コイル) 平面コイル
(下側コイル)
アモルファス磁歪箔
図 2 検出ヘッドの構造
図3に動作原理,図4に回路構成を示す。図4の破線 で囲まれた部分が検出ヘッドである。検出コイルに誘 起される電圧は,同期整流することで直流の出力電圧 に変換される。励磁コイルに流れる電流を
I1,検出コ イルに生じる電圧を
V2,励磁コイル‐検出コイル間の 相互インダクタンスを
M,角周波数を
ωとし,同期整 流器の入力インピーダンスが十分に大きく検出コイル に流れる電流がゼロであるとすると次式が成り立つ。
V2
=
jωMI1(1)
励磁コイルと検出コイルは直交関係にあり,応力がな ければ図3(a)のように磁束は検出コイルに鎖交しない,
すなわち
M= 0 であるため検出コイルに電圧は誘起 されない。磁歪定数が正であるアモルファス磁歪箔に 例えば図3(b)のように引張応力
σを加えると,応力誘 導磁気異方性により磁束が回転して検出コイルに鎖交 する成分が発生し,電圧が誘起される。すなわち,応 力に応じて
Mが変化することで出力電圧が得られる。
圧縮応力を加えた場合は,生じる
Mは逆符号となり,
同期整流することで応力印加の向きに対応した出力電
圧が得られる。
励磁と検出の回路系が絶縁されていることや,応力 がゼロのときに出力電圧がゼロになることも本センサ の特徴である。また,素子のインピーダンスの変化を 検出する方式のようにブリッジ回路等の比較回路が不 要で,回路構成を簡素化できる。
3 実験 3-1 実験方法
平 面コ イ ル は , 厚さ50
µmの ポ リイ ミ ド 基 板 上に 厚 さ35
µmの銅の 螺旋パ ター ン を形成 した も ので, 大き さは10×10mm
2,巻数は16回である。磁歪箔には入手が 容易で予備実験で高感度が得られたMetglas 2605SCを 用いた 。ヨー クにはMetglas2605SC(
µi:14000)と磁 歪を持たないMetglas2705M(
µi:30000)の2種類を使 用した。2個の平面コイル,磁歪箔とヨークで構成さ れた検出ヘッドのうち,磁歪箔のみを断面15
×15mm
2, 長さ約150mmのアルミニウム製の角棒の側面に接着剤 で固定し,平面コイル及びヨークは両面テープで固定 した。アルミ角棒の一端を固定して片持ち梁の状態に し,検出ヘッド部に±0.49Nmの曲げモーメントが生じ るように他端に力を印加したときの出力電圧の変化か ら感度を算出した。同期整流器の同期位相は,最大の 感度が得られるように調整した。また,感度は,同期 整流器を含む測定系の増幅率が1となるように換算し た。
3-2 感度特性
3-2-1 実測による感度比較
磁 歪 箔 及 び ヨ ー ク は 10×10mm
2と 14×14mm
2の 2種 類 の大きさを用意し,表1に示す10通りの構成について 感度比較を行った。励磁周波数は100kHzとした。
検出コイル 励磁コイル
(a) 応力がゼロの場合
(b) 横方向に引張応力が加わった場合 図 3 平面コイルによる力の検出原理
σ 応力σ
検出ヘッド 同期整流器
図 4 力センサの回路構成
信号入力参照信号入力
出力電圧 磁束
磁束
検出コイル 励磁コイル
表 1 検出ヘッドの構成
① 励磁 検出 10mm×10mm なし
② 検出 励磁 10mm×10mm なし
③ 励磁 検出 10mm×10mm 2705M 10mm×10mm
④ 検出 励磁 10mm×10mm 2705M 10mm×10mm
⑤ 励磁 検出 10mm×10mm 2605SC 10mm×10mm
⑥ 検出 励磁 10mm×10mm 2605SC 10mm×10mm
⑦ 励磁 検出 10mm×10mm 2705M 14mm×14mm
⑧ 励磁 検出 14mm×14mm なし
⑨ 励磁 検出 14mm×14mm 2705M 10mm×10mm
⑩ 励磁 検出 14mm×14mm 2705M 14mm×14mm 上側コイル 下側コイル 磁歪箔 ヨーク
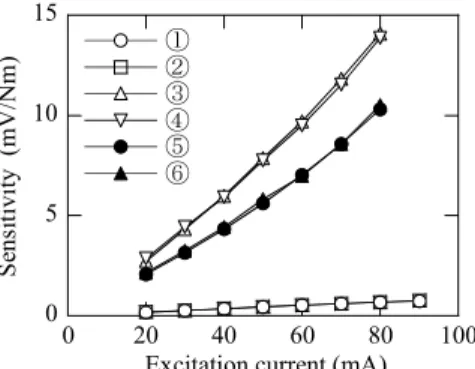
図5に表1の①~⑥の検出ヘッドの構成の感度を示 す。①~⑥は磁歪箔及びヨークのサイズが全て同じ10
×10mm
2であり,図5はヨークの有無及びヨークの材質 の違いによる感度の比較を示している。ヨークなしに 比 べ ヨ ー ク を 付 加 す る と , 励 磁 電 流 が 80mAの と き , Metglas2605SCでは15倍,2705Mでは21倍に感度が向上 した。ヨークは強固に固定されているわけではないこ とから,ヨークにひずみが伝わることによる磁歪効果 が感度向上に寄与しているのではなく,ヨークの透磁 率の差が励磁効率の差として感度向上に現れたと考え られる。また,上下のコイルどちらを励磁,検出とし
て使用しても差は見られなかった。図6,図7に磁歪箔 及びヨークの大きさの違いによる感度比較を示す。図 6は磁歪箔の大きさが10×10mm
2の表1の①,③,⑦,
図7は磁歪箔の大きさが14×14mm
2の表1の⑧,⑨,⑩ の検出ヘッドの比較である。10×10mm
2の磁歪箔を用 いた場合(図6),ヨークなしに比べ,励磁電流が80mA のとき,10×10mm
2のヨークでは21倍,14×14mm
2のヨ ークでは18倍に感度が向上した。14×14mm
2の磁歪箔 を用いた 場合 (図7), ヨー クなし比 べ, 励磁電流 が 80mAのとき,10×10mm
2のヨークでは19倍,14×14mm
2のヨークでは11倍に感度が向上した。以上より,磁歪 箔,ヨーク共に10×10mm
2のときに最も高感度となり,
励磁電流が80mAのとき14.1mV/Nmの感度が得られるこ とがわかった。これは,平面コイルよりも大きな磁歪 箔やヨークでは磁束が広範囲に分散するのに対し,平 面コイルと同じ大きさの磁歪箔やヨークを用いると,
コイル部に磁束が集中されることが要因と考えられる。
3-2-2 数値計算による感度比較
表1に示す①,③,⑦,⑧,⑨,⑩に相当する組合 せと,磁歪箔及びヨークの大きさを7×7mm
2とした組 合せ(⑪とする)の計7通りについて,有限要素法を 用いた数値計算により,磁束密度分布の比較を行った。
作成したモデルのコイルの巻き数は実際のコイルの半 分である8回,磁歪箔及びヨークの透磁率は共に20000,
励磁周波数は100kHz,励磁電流は1Aとした。
図8のコイルの中心を始点とする矢印に沿った直線 上での磁歪箔表面,及びヨーク表面での磁束密度分布 の比較を図9に示す。図9の横軸の0mmの位置がコイル の中心(図8の矢印の始点)である。図9(a)の③と⑦,
(b)の③と⑨のラインはほぼ重なっている。図9より,
磁歪箔表面とヨーク表面の両方でコイル中心付近(0
~5mm付近)の磁束密度が最も大きくなるのは,磁歪
05 10 15
0 20 40 60 80 100
①
②
③
④
⑤
⑥
Sensitivity (mV/Nm)
Excitation current (mA)
図 5 ヨークの有無による感度の比較
0 5 10 15
0 20 40 60 80 100
①
③
⑦
Sensitivity (mV/Nm)
Excitation current (mA)
図 6 ヨ ー ク の サ イ ズ に よ る 感 度 比 較
(磁歪薄帯:10×10 mm
2)
0 5 10 15
0 20 40 60 80 100
⑧
⑨
⑩
Sensitivity (mV/Nm)
Excitation current (mA)
図 7 ヨークのサイズによる感度比較
(磁歪箔:14×14 mm
2) 図 8 磁束分布評価のためのパス
10 mm14 mm
箔,ヨーク共に10×10mm
2である③の組合せに相当す る場合であることがわかった。本検出ヘッドは,コイ ルの中心付近が力検出に最も有効な箇所であり,3-2- 1の実測による比較において,③の組合せが最も高感 度であるという結果を裏付ける結果が得られた。
4 まとめ
直交させて重ねた2つの平面コイルをアモルファス 磁歪箔とアモルファスヨークで挟み込んだ構造の検出 ヘッドを持つ力センサを提案,試作した。
磁歪箔及びヨークの大きさは,平面コイルと同じ大 きさのとき高感度となることがわかった。断面が15×
15mm
2のアルミ角棒に取り付けて曲げモーメントを加 えたとき,14.1mV/Nmの感度が得られた。
5 謝辞
本研究を遂行するにあたりご助言をいただいた九州 大学大学院笹田一郎教授に感謝いたします。
6 参考文献
1)M. Wun-Fogle, H. T. Savage and A. E. Clark : Sensor and Actuators, Vol.12, p.323-331 (1987) 2)L. P. Shen, T. Uchiyama, K. Mohri, E. Kita and K. Bushida : IEEE Trans. Magnetics, Vol.33, No.5, p.3355-3357 (1997)
3)今村幸善,Shin Kwang-Ho,石山和志,井上光輝,
新井賢一:電気学会マグネティックス研究会資料,
MAG-00-191, p.21-26 (2000)
4)脇若弘之,山田洋次,渡辺利彦,梅本美之,清宮照 夫,牧村美加:日本応用磁気学会誌,26巻(4号),
p.543-546 (2002)
5)西部正規,岡田勇輝,坂本一樹,佐藤敏郎,山沢清 人 , 三 浦 義 正 : 電 気 学 会 全 国 大 会 講 演 論 文 集 , 2- 138, p.155-156 (2006)
6)I. Sasada and F. Koga : J. Appl. Phys., Vol.75, No.10, p.5916-5918 (1994)
7)衛藤佳之,加藤敬,葉畑陽平,笹田一郎:電気学会 マグネティックス研究会資料,MAG-05-35, p.63-67 (2005)
図 9 磁歪箔とヨーク上でのパスに沿った 磁束密度の変化
(a) 磁歪箔上の磁束密度
(b) ヨーク上の磁束密度
05 10-9 1 10-8 1.5 10-8 2 10-8
0 2 4 6 8 10
③
⑦
⑨
⑩
⑪
Flux densitiy (T)
Position (mm) 0
5 10-9 1 10-8 1.5 10-8 2 10-8
0 2 4 6 8 10
①
③
⑦
⑧
⑨
⑩ Flux densitiy (T) ⑪
Position (mm)