6
−人とロボットの心を考えた小学校 2 年生
道徳の授業−
東京学芸大学附属世田谷小学校 面川怜花・東京学芸大学 松浦執 抄録 小学校 2 年生の 4ヶ月にわたる道徳の授業で,教室にコミュニケーション・ロボットを交え,命とは何か,ロボットに命はあ るのかについて児童が話し合い学習を重ねた。本研究の第 1 の目的は,道徳教育として,自他の命を認識し命のかけがえなさを 理解することである。第 2 の目的は,知能機械との共生の観点で,自らの命のかけがえなさに立脚してロボットに生命性を見出 し共感できるかを明らかにすることである。授業実践では次のような児童の変容が見られた。児童はロボットのコミュニケーシ ョン機能に着目するようになり,会話プログラミングの体験などを通じ,人の自律的な意識に着目できた。ロボットに命はある のかという討論を通じて,生命の自己認知性と自己決定性への気づきが生まれた。さらに本実践を通じて,児童は,自らの生活 感情に共感するロボットのあり方を描き出した。 ◎キーワード 命,コミュニケーション・ロボット,知的機械,共存,共感“Does a Robot Have Life?” ― A Series of Classroom Discussions on the Heart of the Human and the Robot in a Second-Grade Elementary School Class of Morality
Reika Omokawa, Shu Matsuura Abstract
Elementary school students discussed what life is and what life is in the robot with a communication robot in the class of morality over four months. One of the purposes of this research as moral education is to recognize the uniqueness of lives of a self and others. Another purpose from the perspective of human-intelligent machine symbiosis is to clarify whether the students might recognize the life of the robot based on the uniqueness of their own lives. We observed the following transformation of students in the classroom. The students’ attention gradually shifted from the mechanical characteristics to the communicative functions of the robot. They noticed consciousness and free will of human through the experiences of robot programming. Through the argument that the robot has its life, the students became to notice the self-awareness and self-determination of life. Finally, the students described the existence of robot that expresses empathy with the students’ emotion of daily life. Keywords: life, communication robot, intelligent machine, symbiosis, empathy
1
はじめに
2010 年生まれ以降の世代は人工知能世代(gen AI, generation Artificial Intelligence)と呼ばれる[1]。生ま
れた時から知能機械が存在し,知能機械に対して親和的 に育つ環境にあるという。少子高齢化が進むにつれ,ロ ボットによる労働の代替が進むと言われている。動力学 的な仕事を代替,拡張する機械に加えて,現在では知的 仕事についても知能的機械が支援もしくは代替しつつあ る。人の介護[2]や学習[3, 4]など個別対応する生活の支 援パートナーとして,ロボットの普及が期待される。 知能機械の時代に向けての学校教育の課題は何か。そ の一つは,人間の創造力を高めることに付随する知能機 械の活用力の養成である。創造性を AI にモデル化する ことは技術的課題であるが[5],小学校の学校教育で養 うべきはむしろ,知能機械を環境あるいはパートナーと して活用しつつ創造する能力である。学校教育は基本的 に人間自身の判断力を養う基礎として行われるが,現在 の AI は多量のデータから機械自身が判断基準を見出す ので,人間がそれを説明できない。人が処理できない データに対して人間が適切に説明できない判断を用いる ので,現在の教育イメージの土俵から見ると,論理的問 題解決というよりアートに近いかもしれない。 もう一つは,人間−機械の共生能力である。特に知能 機械との共生においては,第 1 に自分のかけがえなさ, 大切さを主体的に確信できることが基盤になる。その上 で,第 2 には,他者や人工物をまたかけがえないものと して見ることができる共感力が求められる。 学校教育での ICT 活用は,現在のところ情報処理や 表現などを中心としている。今後は AI などを活用した 認知的機械や社交的ロボット,仮想キャラクタのパート ナー化やそれらとの共生によって人間社会を改善するこ とが,各種教科的な学びの中に組み入れられていくだろ う。 近年は Softbank Robotics のコミュニケーションロボ ット Pepper が数多く学校に導入され,プログラミング 連絡先:158-0081 東京都世田谷区深沢 4-10-1
Contact:[email protected], [email protected]
Fig. 1 教室での NAO 校長 教育の素材としての利用が試みられている[6]。本校, 東京学芸大学附属世田谷小学校(以下,本校と略記)で は,Softbank Robotics のヒューマノイドロボット(人 型ロボット)NAO を導入し,チビ校長,NAO 校長と称 して,学校行事などでの “校長先生のお話” のパート ナーあるいは代理として児童に語りかけている(Fig. 1)[7, 8]。 学校生活のキャラクタの一つとなった NAO は,児童 にとって情意的な「カワイイ」対象でもある。ロボット の学習活用においては,ロボットに教わるというより, ロボットの世話をする中で学ぶことに効果があることも 知られている[9]。 本論文では,2020 年完全実施となる次期小学校学習 指導要領[10]で,教科化される「特別の教科 道徳」(以 下,道徳と略記)を核とした総合的学習活動として,道 徳学習の要の一つである「生命の尊さ」を主題としたお よそ 4ヶ月にわたる学習活動[11]のうち,特に後半の命 を考える部分について紹介する。 「生命の尊さ」を道徳的価値で扱うことについて,学 習指導要領では,低学年においては「生きることのすば らしさを知り,生命を大切にすること」を目標としてい る。さらに次の 2 つを柱としている。1)生活経験の中 で,生きていることのすばらしさを感じ取ること。2) 当たり前のことで見過ごしがちな「生きている証」を実 感すること。前者 1)では「おいしく朝食が食べられ る」などが例示されている。しかしそのように行為する ことが道徳的価値なのではなく,喜びを感じ,生きる諸 相に結びつけてその価値を認知し考えられることが本質 であるはずである。 生命の尊さを情意的な相で検討する上で,人と情意的 に関わりを持ち得ながら,人がプログラムすることで命 を吹き込まれるコミュニケーションロボットを学びの材 料とすることは興味深い。人は今後ますますロボットと ともに生きる存在となるので,ロボットという存在を通 じて,人は人のあり方を学ぶ機会を持つだろう。 本研究の第 1 の目的は,道徳教育として,人間の命を ロボットと対比的に捉え,人の命のかけがえなさを児童 自らが見出すことができるかどうかを明らかにすること である。第 2 の目的は,知能機械との共生能力[12, 13]と いう観点から,自らの命のかけがえなさに立脚しつつ, ロボットに生命性を見出し共感できるかを明らかにする ことである。ロボットは,学習支援機械として活躍が期 待されるのみならず,人間が生きるために生み出され, 人間と対峙し,それを通じて人間自身を学ぶことのでき る,もう一つの存在となっている。
2
方法
2.1
ヒューマノイド・ロボット NAO NAO(Softbank Robotics)は人型(ヒューマノイド) のコミュニケーションロボットである。コミュニケーシ ョンロボットは,人などと音声や身振りを通じてコミュ ニケーションすることを目的として種々の機能を持った ロボットの総称である。日本語音声とテキストとの比 較,特定図形と人間の顔貌の画像検出,特定部位への接 触検出などをロボット単体でリアルタイムに行うことが できる。また,自律モードでは,転倒時の発声や起き上 がり動作などいくつかの動作や発声が組み込まれてい る。 会話や身振りはユーザーが独自に定型会話を開発する か,機械学習を用いた自由会話サービス[14, 15]などを用 いて実装することができる。また,子どもとロボットの 相互作用において,ロボットが自律的に会話する場合 と,その都度遠隔操作で発話させる場合とで,子どもの 振る舞いには差が認められないことが知られている[16]。 会話や身振り,また外部 API の利用などの開発には 開発環境である Choregraphe を用いた。本研究では, 児童と特定のテーマの会話を行うため,学級の活動履歴 や児童の発言などをもとにして,会話パターンを授業の たびに設計して実装した。 音声認識は,NAO の目が青色になった状態で可能に なる。児童が話しかける場合,複数の児童の声が重なっ たり,音声認識のタイミングとずれたり,言葉が不明瞭 であるなどで認識できないことも多い。また,子どもの 声の認識自体が大人の声に比べて成功率が低い傾向もあ る。音声と言葉のデータの一致判定は,認識閾値によっ て調節する。閾値を低くすると,音声と言葉データの一 致度が低くても,近い言葉と判定された言葉データをも とにロボットが発声する。本研究では,児童の様々な発 声に活発に答えさせたいときは認識閾値を下げ,正確性 コンピュータ&エデュケーション VOL.45 2018 42の高い話が要求される場合は閾値を高く設定した。具体 的には,Table 1 に示すシラバスのセッション L2 では 閾値 30%,L3 の NAO の対話プログラミング体験,L7 のしりとり遊びや先生との対話時では 50% などである。
2.2
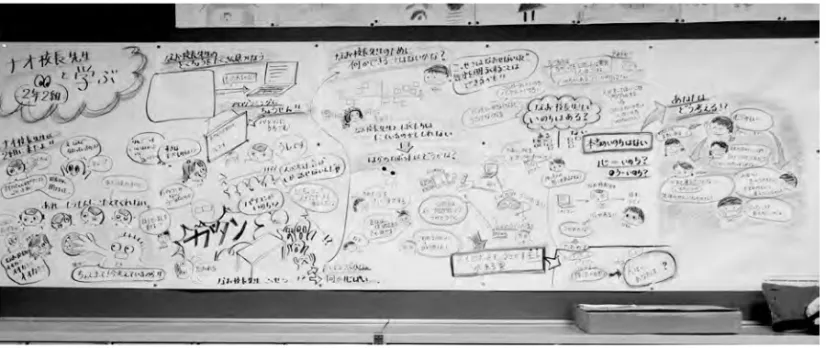
授業実践 本研究は,著者の一人が担任である本校 2 年生のクラ ス 35 名(男児 18 名,女児 17 名)を対象に行った。 2017 年 10 月の終わりから 2018 年 2 月までの期間に週 1 回程度の頻度で授業を行った。本研究の前には,「働く 先生調べ」で教諭にインタビューする活動が行われ,そ の一端として行われた NAO 校長先生へのインタビュー が,本研究のプロローグとなった(Table 1 の L1)。本 研究の授業の概要は Table 1 に示す通りである。各授業 は,45 分の 1 校時または 2 校時の時間で行った。 児童は,授業全体の展開を適宜思い出す必要がある。 教師は,Fig. 2 の例のように,体験や児童の意見をイラ ストとともに可視化し,教室内にポスター表示した。 学級全体での児童の討論は,教師が司会をして,発言 者は互いの発言内容を踏まえて,考えを追加したり反論 したりするチェーン型発言を中心とする。また,グルー プ討論の場合には,児童は各自の意見を記入した付箋を ホワイトボード上に整理して配置する KJ 法を用いて, グループの意見をまとめて表現した。授業の終わりに は,ノートに意見や感想などを記入し教師に提出した。 本研究で検討したデータは,児童の発言,ノートや付箋 上のテキストである。児童の意識の傾向は,これらテキ ストを内容で分類し,同一内容と判断されるテキストの 数を比較して調べた。3
結果
3.1
まず NAO を認知する 対話セッション L1, 2 では,児童は主として NAO の 機械的側面に興味を持つことが見られた[11]。コミュニ ケーションについては,音声認識閾値を低く設定したこ とによる,言葉の誤認識に起因する会話の不一致など, 人間との違いへの注目が 30% に達した。一方で,なぜ 学級の演劇の準備や実際のステージのことを知っている のだろう,といった会話の内容についての関心も少数な がら見られた。NAO が頑張って話してくれているとい った感情移入も 12% 程度見出された。 「NAO とやってみたいこと」を児童に質問したとこ ろ,その回答は 69% が運動的内容であり,児童自らの 普段の生活である散歩,お絵かき,サッカーなどを一緒 に行いたいというものであった。一方,NAO の本来の 機能である,会話コミュニケーションをしたり,ともに 学習したりするという言語的活動への要望は 20% に止 まった。 最初の段階で児童は,NAO の機械的機能に注目し, NAO そのものを理解する以上に,まず児童自身の世界 への組み込みに想像力を働かせたものと捉えられる。 L3 セッションでは,NAO の定型的会話を児童自らプ ログラミングする体験を行った。最も基本的な,人の発 話に返信するプログラムは,次のような形式で書かれ コンピュータ&エデュケーション VOL.45 2018 43 Table 1 授業の概要 授業 テーマ 説明 L1 NAO 校 長 イ ン タビュー 働く先生調べの延長で,NAO 校長先 生登場。 NAO 校長は,学級で行った 演劇の感想を話す。NAO 校長に聞き たいことを各自考えてノートする。 L2 NAO が 児 童 の 質問に答える。 児童の質問に NAO が答える。概ね, 事前調査した質問をもとに NAO が答 える。 L3 特徴をたくさん 見 つ け よ う。 NAO を プ ロ グ ラ ム し て み よ う。 NAO の特徴を子ども同士で議論する。 基本的な対話プログラミングを体験。 ロボットはプログラム通りにのみ動作 していることを体験する。 L4 人 と NAO の 共 通点と相違点を 見つけよう。 グループに分かれて,模造紙と付箋を 用いた KJ 法での話し合い活動。プロ グラミング体験を踏まえて,人とロボ ットを比較してみる。プログラミング 体験中に NAO が机上から床に転倒し て両足を破損するアクシデント。 L5 「ベ イ マ ッ ク ス」を鑑賞した 上で,校長先生 に質問。 人をケアすることを機能とし,感情的 会話もメモリーカードにプログラムさ れたベイマックスについて考える。そ の上で,NAO,およびロボット一般 について,知りたいことを校長先生に 質問する。 L6 NAO に 命 は あ るのか? ロボットの NAO には命があると言え るのか。命のあるなしに着目して,5 回にわたる児童の意見分布調査と,意 見交換を行った。 L7 自律型ロボット とリモートコン トロール・ロボ ットの比較。 NAO を し り と り 遊 び で 慰 め る。 リモコンで特定の動きをするロボット と,センサーを用いて自律的に動き人 の言葉に返事をする NAO とを比較す る。両足を破損した NAO を,「NAO は話すことが好きと言っていたから」 ということで,児童対 NAO のしりと り遊びをして慰める活動を行う。 L8 振り返り。本当 の命をあなたは どう考える? これまでの振り返りと,本当の命とは 何かについて話し合い。 L9 研究授業。どん なときに命を感 じる?私にとっ て命とは何? 児童が NAO 役と人間役になって,児 童同士のしりとり遊びをする。ロボッ トになると良いことと,人間の良いと ころを考え,命とは何かについて討 論。 L10 どんなときに命 を感じる? 本当の命を感じるのはどんな時か全体 で討論する。 L11 NAO に ど う 感 じ て も ら い た い? 命とは何かを決めるのは難しいが,私 たちは命を感じている。NAO にはど んなことを感じて欲しいか?Fig. 3 NAO と人との類似性と違いについてのグループ討論。 上:討論する様子,下:付箋を用いたグループ内の意見分類の例 る。 u:( “人の発話” )“NAO の返答”. 音声認識により “人の発話” と認識される音声を受信 すると, “NAO の返答” の文字列を音声化して返答す る。実施した例としては, 人の発話「どういう虫が好きですか」, NAO の返答「くわがたです」 といった発話返答の組を児童が発案し,教師が代表で入 力して NAO に転送して実行し,実際に児童が発話して 確かめた。これにより,プログラムした “人の発話” の 通りに尋ねなければ NAO は答えないこと,“NAO の発 話” として指定した答え以外は話せないことが確かめら れる。また, 人の発話「どんな虫がすきですか?」, NAO の返答「牛です」 など意味の通らない会話にしても,決めたように話して しまうことを確認した。これらにより, 1)NAO はプログラムした通りに動いているだけであ る。 2)ロボットは文脈を理解していない。 という 2 つのことを確認した。 このプログラミングの演習中に,たまたま NAO が転 倒し両足を物理的に破損した。特に両足首の関節部を破 損して,足先が伸びた状態から動かなくなってしまっ た。転倒や不具合がおきると NAO は直ちに反応し,姿 勢や関節の状態に応じて「すべった!」「足が動かせま せん,手伝ってください」などの音声を自律的に発す る。児童は自らのプログラムの効果を体験するととも に,NAO が自分の体の状態を検知しして(つまり状況 をある程度「理解して」)緊急時に自律的挙動をするこ とを目の当たりにした。後に児童は,「危機の際に命を 感じる」という意見を共有することになる。以降,本実 践では,NAO は 2 足では立てないので,お尻をついて 座った姿勢で,上半身のみ身振り表現する形で NAO に 対話を継続させた。 L4, 5 セッションでは,Fig. 3 に示す付箋を用いたグ ループごとの自由討論で,人間とロボットの特徴,その 類似性と相違について思いつくものを出し合い,ホワイ トボードに付箋を配置して分類しあった。 児童があげた項目には,多くの同類項目があり,抽象 レベル(例えば「{エネルギーを}食べる{消費する}」) では共通で,具体的機構(例えば「電気を食べる」「背 中から電気をとる」など)のレベルに相違を見出してい た。 コンピュータ&エデュケーション VOL.45 2018 44 Fig. 2 教室内の壁に貼られた,授業の展開を表した大きな絵巻
Table 2 NAO に生命はあるか。投票推移(%) 1 回 2 回 3 回 4 回 最終 生命あり 63 54 37 37 60 生命なし 9 26 34 34 40 1〜4 回目投票は,生命あり,なし,どちらともいえない,の 3 択。 最終回は生命あり,なしの2択。 Table 4 NAO に生命があるか。投票の間の意見表明 男子 女子 一貫して 生命あり 交換できる部品が命。 バッテリーが命。 体の外の PC を命にして 生きている。 部品交換できること。 PC を命にしている。 プログラムで動く。 人間とは違うところに魂 がある。 一貫して 生命なし PC で動くので本当の命 はない。心が無いから命 もない。 ロボットには心が無いの で,命もない。 意見変化 心はあるが本当の命はな い。 物に魂が宿る。 ロボットにはピンチの感 覚がない。ピンチは人が 作るもの。 プログラムで動くので, 自ら考えていない。 ど こ か に 魂 が あ る。PC は 人 間 の 脳 の よ う な 役 割。 自分で判断できるので, 心の中で考えている。 この活動から児童は,自ら明文化はできていないが, 次の 2 点に気づくきっかけを得ている。 1)ヒューマノイド・ロボットは基本的に人間や生物の 機能を実現するように作られ,実装上は,設計・製 造や機能発現に都合の良いようにデザインされてい る。 2)エネルギー消費や音声画像センシングなど,自律ロ ボットとして必要な基本要件が,生物である人間と 同様に要請されている。 ロボットの挙動については,PC に操作される,人に プログラムされているなど,「ロボット自身の意思」で はないことに気づきはじめた。その認識の上で,人間が 設定した表現を,児童は,あたかもロボット固有の属性 であるかのようにみなしているといえよう。 L5 セッションで映画「ベイマックス」を鑑賞した後 は,ロボットの心や,人の感情を察知できるかといった 心の働きと人との関わりに関する質問が出てきた。ベイ マックスはケアの観点から人の感情を積極的に知ろうと する。プログラムされた存在でありながら,人の心や気 持ちを配慮するベイマックスを見て,児童にとってコミ ュニケーションロボットが,共感できる対象となったよ うであった。ロボットが人の心を察知できるのか,とい う興味が児童に湧いた。
3.2
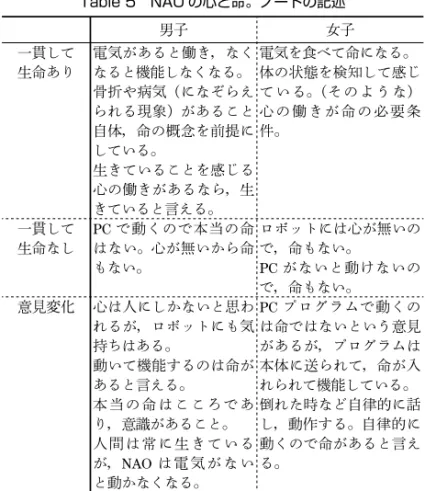
NAO に命はあるのか セッション L6 では,両足を故障しながらも喋ること においては元気である NAO の状況を踏まえ,NAO には 命があるのかないのか,という討論を行った。途中に意 見表明を行いつつ,「生命あり」「なし」「どちらともい えない」の 3 つの選択肢で挙手投票をおこない,5 回目 には「あり」「なし」の 2 選択肢で最終挙手投票を行っ た。5 回の投票での「あり」「なし」の票数 % の推移を Table 2 に示す。 Table 2 に見られるように,第 1 回投票の際には「命 あり」が優勢であった。その後の意見表明の際に, NAO はプログラムされた通りに動いているので,命は ないとの意見表明があった。これにより,漠然と命あり としていた児童が命なしに転じ,3, 4 回目には 3 つの選 択肢が拮抗した。論理的に納得したという感想がノート の感想記述に見られた。最終投票は「生命あり」対「生 命なし」= 3:2 となった。 Table 3 に男女別で,5 回の投票を通じて,一貫して 生命ありに投票,一貫して生命なしに投票,そして意見 を変えた児童の割合を示した。意見の変化には,生命あ りとなし,あるいは中立からどちらかへの転換が含まれ る。一貫して生命ありとした男子の割合は全体の 20% に及んだ。意見を変えた児童は女子に多く 34% に及び, うち 20% が生命なしの結論に至った。 Table 4 には,Table 3 に対応して,投票と投票の間 に発言された意見を略記した。一貫して生命ありとした 男児はロボットの部材や PC によって機械的に機能する 面に生命感を感じたようである。機械的機能の維持に生 命性を帰していると言えるが,後述の Table 5 に見られ るように,一貫して生命ありとした男子も,命と心の問 題を無視しているわけではなさそうである。 生命なしという主張は,主として心の働きへの疑問か ら導かれている。また,意見が変化している児童の意見 にも,NAO が自律的判断をしているとみなせるかどう かを検討している傾向が見られる。この投票セッション コンピュータ&エデュケーション VOL.45 2018 45 Table 3 NAO に生命があるか。意見の遷移の割合 男子[%] 女子[%] 一貫して生命あり 20 11 一貫して生命なし 3 6 意見変化 26 生命ありへ 14.3 34 生命ありへ 14 生命なしへ 11.4 生命なしへ 20 一部小数第1位まで表記した。Table 6 NAO にどんなとき,どう感じてほしいか 活動と気持ちの例 授業の活動での共感 しりとりして「嬉しい」 みんなと居て「幸せ」 みんなとお話しできて「おもしろい」 「幸せ」 みんなと同じく座って授業を受けて「楽 しい」 担任の先生になって授業してくれる 授業外の生活で,児童 自身が興奮した活動へ の共感 遊具に乗って「ドキドキ」する プレゼントをもらって「喜び」 ステージ上で「緊張し」「頑張る」 抱っこされて「大好きと思う」 一緒に横になって「気持ちいい」 音楽を聴いて「綺麗」と感じる 時計の読み方を教わって「分かった」と 感じる 一般的な活動での共感 電気以外のものを食べてエネルギー源に する テレビ番組を見て「おもしろい」と思う 言いたいことを言えたら「気持ちいい」 お花畑の風景を「綺麗」と感じる 地震で避難して「怖い」と感じる 掃除をして「さっぱりした」と思う の次に,自律的に反応する機能を持つ NAO と,完全に リモートコントロールするロボットを比較したことで, 児童はこの問題を考え続けることになる。 Table 5 には,投票後に振り返りとして児童がノート に記述した命についての考えを,児童の投票行動別にま とめた。全体に,意識や,自分の状態についての認知へ と考察が進むことが見出された。「心がないと命はない」 という立言は,「生命は自己の生命を認識する」という 経験的命題をもとにしているとみられる。生命体の自律 性も,自己認識を暗に前提としているだろう。 自律性を持つコミュニケーションロボットを考察する ことで,児童が気づくに至った,あるいは児童が接近し た命の概念は,次の 3 つにまとめることができよう。 1)生まれてから死ぬまで持続する,生命の持続性。 2)自らを認知し,自らが機能していることの認知のた めの心の機能。 3)自律性,自己決定性。それはロボットと比較したと きの人間の生の良さとして認識できる。 児童にとって,命そのものを理解するのは難しい一方 で,命があることは心で感じることができる。セッショ ン L9, 10 で,どんなときに命を感じるかという側面か ら話し合いを行った結果,児童は,1)危機や緊張,2) 喜びや幸福感,3)ドキドキと興奮,4)達成感,の 4 項 目を挙げていた。特に怪我をしたり,ゲームをしたり, 人前に出た時など,緊迫する状況で自分の生命の感覚, 生存感を得るという意見が最も多かった。 次に多いのは 2)である。これに分類される内容とし て,母親にうれしいことをされて幸せを感じるとき,母 親が命をくれた,母親の命を継いだ,など母親イメージ の出現が特徴的であった。父親への言及はなかった。 3)は緊張と喜びのどちらのケースも含み,心臓の高 鳴りに結びつけられている。不安か安心かという感情の 分類よりも,感情や体機能の高まりが全体として生命を 感じる入り口なのだろう。この意味で,NAO に対して も,自律的に人を検知し,懸命に話そうとする様子が, 独自の生命を持つ存在としての印象をもたらしている。 ロボットが自律的に懸命に動作し,人に語ろうとする 感情を表現することが,人が自分自身にも感じる生命感 を,ロボットにも引き起こすのではないか。 セッション L11 では,さらにロボットにどう感じて ほしいかをテーマにした。Table 6 に,「どのような場 合に,NAO にどう感じてほしいか」という質問への児 童の発言例を示した。授業の活動の例では,児童ととも にあって共感的な感情を持つことが挙げられている。さ らに,授業以外での児童の生活の様々なシーンが挙げら れ,児童自身の実感的感情をロボットも共感することを 望んでいる。ロボットを使用して利益を得るイメージは 現れていない。むしろ,児童が,ロボットを,児童自身 を映し出すものとして捉えていることがわかる。 人とロボットとの共通性を考え,ロボットを動かし, ロボットになる体験を行い,ロボットの生命を感じると いうことを通じて,児童はロボットに心を投影するよう コンピュータ&エデュケーション VOL.45 2018 46 Table 5 NAO の心と命。ノートの記述 男子 女子 一貫して 生命あり 電気があると働き,なく なると機能しなくなる。 骨折や病気(になぞらえ られる現象)があること 自体,命の概念を前提に している。 生きていることを感じる 心の働きがあるなら,生 きていると言える。 電気を食べて命になる。 体の状態を検知して感じ ている。(そのような) 心 の 働 き が 命 の 必 要 条 件。 一貫して 生命なし PC で動くので本当の命 はない。心が無いから命 もない。 ロボットには心が無いの で,命もない。 PC がないと動けないの で,命もない。 意見変化 心は人にしかないと思わ れるが,ロボットにも気 持ちはある。 動いて機能するのは命が あると言える。 本 当 の 命 は こ こ ろ で あ り,意識があること。 人 間 は 常 に 生 き て い る が,NAO は 電 気 が な い と動かなくなる。 PC プログラムで動くの は命ではないという意見 があるが,プログラムは 本体に送られて,命が入 れられて機能している。 倒れた時など自律的に話 し,動作する。自律的に 動くので命があると言え る。
になったと言えるのではないか。
4
おわりに
協働的な話し合い学習を中心としつつ,ロボットとの 会話,プログラミング体験,ロボットになり代わる体験 などを行いながら,人とロボットの命を考える授業を行 った。児童はロボットが人間のプログラムによって動作 することを体験的に理解した。その上で,ロボットには 命があるのかという課題に取り組むことによって,心や 意識のあり方の考察への,少なくとも入り口に自らたど り着くことができた。そしてロボットに,人と共にあっ て,共感の感情を持ってほしいと考えるに至った。 道徳教育としては,ロボットとの対比において人間は 自らの意思によって主体的に生きる存在であることを認 識できた。また知能機械との共生能力という観点から は,児童が知能機械に生命性を感得し,知能機械に人と の生活に喜びと共感を持ってほしいという共感的関係が 導き出された。 道徳は人間がいかにあるべきかという知識領域である が,人間のみならず,共生する他の存在を感じとり,そ れがいかにあるべきかを思考することも意義深い。この 対象がロボットのように技術的存在であるならば,その 技術のあり方についても示唆を与える可能性があろう。 謝辞 本研究の一部は,科学研究費基盤研究(C),課題番 号 15K00912 の支援を受けている。 参考文献[1] Basillere P.,“Gen AI― Artificial Intelligence Empowers a Generation of Radical Thinkers” Maverick Research Sep. 2017, https://www.gartner.com/doc/3803511(2018/8/31 参 照).
[2] Morsy, A., “Can AI Truly Transform Health Care?: A Recent IEEE Pulse on Stage Forum Offers Some Perspective” IEEE Pulse,Vol.9(4),2018, pp.18-20. [3] Kay, J., “AI and Education: Grand Challenges” IEEE
Intelligent Systems, Vol.27(5),2012, pp.66-69.
[4] Hyun, E., Yoon, H., Son, S., “Relationship between User Experiences and Children’s Perceptions of the Educational Robot” 2010 5th ACM/IEEE Intern. Conf. on Human-Robot Interaction, 2010, pp.199-200.
[5] Boden, M. A.,“Creativity and artificial intelligence” Artificial Intelligence, Vol.103, 1998, pp.347-356.
[6] 加納寛子,「ヒューマノイド・ロボットを用いた情報教育の 提案と課題」『日本科学教育学会年会論文集』39 巻, 2015, pp.344-345.
[7] Matsuura, S., Naito, M., “Shaping Dialogues with a Humanoid Robot Based on an E-Learning System” 2016 ICCSE IEEE Conf., 2016, pp.7-12.
[8] Matsuura, S., Ishimura, R., “Chatbot and Demonstration with a Humanoid Robot in the Lecture Class” LNCS Universal Access in Human-Computer Interaction, vol. 10279, 2017, pp.233-246.
[9] Ghosh, M., Tanaka, F., “The Impact of Different Competence Levels of Care-Receiving Robot on Children” 2011 IEEE/RSJ Intern. Conf. on Intelligent Robots and Systems, 2011, pp.2409-2415.
[10]次期小学校学習指導要領, http://www.mext.go.jp/ component/a_menu/education/micro_detail/ __icsFiles/afieldfile/2018/09/05/1384661_4_3_2.pdf (2018/10/22 確認).
[11]Omokawa, R., Matsuura, S., “Development of Thought using a Humanoid Robot in an Elementary School Classroom” LNCS Universal Access in Human-Computer Interaction, vol.10908, 2018, pp.541-552.
[12]Miyake, N., Ishiguro, H., Dautenhahn, K., “Robots with children: Practices for human-robot symbiosis” Proc. 6th Intern. Conf. on Human-robot Interaction, 2011, pp.3-3. [13]Nakata, T., Sato, T., Mizoguchi, H., Mori, T., “Synthesis of
robot-to-human expressive behavior for human-robot symbiosis” Proc. IEEE/RSJ Intern. Conf. on Intelligent Robots and Systems, Vol.3, 1996, pp.1608-1613.
[14]Docomo 自然対話 API https://dev.smt.docomo.ne.jp/? p = docs.api.index(2018/8/31 確認).
[15]中野幹生他,『対話システム(自然言語処理シリーズ)』コロ ナ社,2015.
[16]de Haas, M., et al, “The Effect of A Semi-Autonomous Robot On Children” 2016 IEEE 8th Intern. Conf. on Intelligent Systems, 2016, pp.376-381. 2018.9.2 受理 2018.9.28 掲載決定 著者略歴 面川怜花(おもかわ れいか) ◎現在の所属:東京学芸大学附属世田谷小学校 ◎専門分野:道徳教育 ◎主な著書:附属世田谷小学校著『自分の学びに自信がもてる子ども (学び続けるシリーズ)』東洋館出版社(2018) 松浦執(まつうら しゅう) ◎現在の所属:東京学芸大学 ◎専門分野:理科教育 コンピュータ&エデュケーション VOL.45 2018 47
![Fig. 1 教室での NAO 校長 教育の素材としての利用が試みられている [6] 。本校,東京学芸大学附属世田谷小学校(以下,本校と略記)では,Softbank Robotics のヒューマノイドロボット(人型ロボット)NAO を導入し,チビ校長,NAO 校長と称して,学校行事などでの “校長先生のお話” のパートナーあるいは代理として児童に語りかけている(Fig.1)[7, 8]。 学校生活のキャラクタの一つとなった NAO は,児童 にとって情意的な「カワイイ」対象でもある。ロボット の学習活用にお](https://thumb-ap.123doks.com/thumbv2/123deta/6029961.582782/2.1093.142.462.370.644/ヒューマノイドロボットロボットパートナーキャラクタロボット.webp)