1) 筑波大学大学院人間総合科学研究科 〒3058574 茨城県つくば市天王台 111 2) 筑波大学体育科学系
〒3058574 茨城県つくば市天王台 111 連絡先 柴山一仁
1. Graduate School of Comprehensive Human Sciences, University of Tsukuba
111, Tenno-dai, Tsukuba, Ibaraki 3058574 2. Institute of Health and Sports Sciences, University of
Tsukuba
111, Tenno-dai, Tsukuba, Ibaraki 3058574 Corresponding author shibayama@lasbim.taiiku.tsukuba.ac.jp
一流110 m ハードル走選手の 1 サイクル動作に関する
キネマティクス的研究
疾走速度および脚長と動作の関連から
柴山 一仁1) 藤井 範久2) 阿江 通良2)Kazuhito Shibayama1, Norihisa Fujii2and Michiyoshi Ae2: Kinematic study of 1cycle motion in elite 110
m hurdlers: Focusing on relations between running velocity, leg length and motion. Japan J. Phys. Educ. Hlth. Sport Sci. 56: 7588, June, 2011
AbstractThe purpose of this study was to investigate the kinematic characteristics of World and Japanese elite 110m hurdlers during 1cycle motion in relation to running velocity and leg length. Twenty-nine male hurdlers (SB: 12.9214.37 s) participated. The motions from touchdown of the lead leg at the 6th hurdle (1st step) to touchdown of the takeoŠ leg at the 7th hurdle (4th step) were video-taped using a digital VTR camera (60 Hz), and two-dimensional coordinates were calculated based on calibration marks. The motions from touchdown of the takeoŠ leg at the 7th hurdle to touchdown of the lead leg at the 7th hurdle (1st step) were videotaped using two high-speed VTR cameras (200300 Hz), and converted to two-dimensional coordinates after calculation of the three-dimensional coordinates us-ing a DLT method. Kinematic parameters were calculated, includus-ing step length, step frequency, angles and angular velocities of the shank and thigh, and durations of the support and airborne phases. Stepwise multiple regression analysis was conducted with kinematic parameters as dependent variables, and with running velocity and leg length as independent variables at p<.05. The results were as follows: (1) Faster hurdlers achieved a higher step frequency with less range of thigh motion of the takeoŠ leg during the 2nd step. (2) The 3rd step played a role in adjusting the step length and preparing for hurdling, espe-cially in hurdlers with a shorter leg length when preparing to increase the vertical GRF in the 4th step. (3) The allocation of time from takeoŠ at the 4th step to touchdown at the 2nd step was dependent on leg length. (4) Faster hurdlers achieved smaller vertical displacement of CG during the 1st step by shorten-ing the support time to keep the position of the thigh perpendicular at the 2nd step. These results show that faster hurdlers achieved shorter durations of 1cycle motion because of the increasing in horizontal CG velocity during the shorter support time at the 2nd step.
Key wordsthe 2nd step, acceleration in short time, range of thigh motion キーワード2 歩目,短時間での加速,大腿の動作範囲
.
緒
言
110 m ハードル走(以下110 mH 走と表記)は, 9.14 m 間隔で置かれた高さ1.067 m のハードル を10台越えて,スタートからゴールまでをでき る限り短い時間で走り抜ける競技である.110 mH 走の世 界記録 は2008 年に Dayron Robles 選 手(CUB)がマークした12.87 s であるのに対し, 日 本 記 録 は 2004 年 に 谷 川 聡 選 手 が マ ー ク し た 13.39 s であり,大きく差をつけられている.こ のような現状から,日本人選手の競技力向上への 示唆を明らかにすることを目的とした研究が散見 される(森田ほか,1994伊藤・富樫,1997 磯 ほ か , 2002 谷 川 ほ か , 2002 大 橋 ほ か , 2006).森田ほか(1994)は,世界陸上東京大会 の優勝選手と日本人選手の踏切および着地動作を 分析し,優勝選手は支持脚の膝関節を屈曲し続け る「引っかき型」の踏切であったのに対し,日本 人選手は膝関節の屈曲伸展動作を伴う「屈伸型」 の 踏 切 で あ っ た と 報 告 し て い る . 谷 川 ほ か (2002)は,14秒台から13秒台までの日本人選手 を対象に,インターバル走動作の技能差を検討し, 1 インターバルの平均走速度が高い被験者ほど, ハードリング後の着地時の重心高が高く,2 歩目 ではスプリントに近い動作を行い,3 歩目では被 験者によって踏切準備動作とスプリントに近い動 作に分かれたことを報告している. インターバル走およびハードリングの各歩に は,それぞれ固有の役割があることが指摘されて おり(McDonald, 2002),それらの関連性を考慮 してパフォーマンス向上への示唆を明らかにする ためには,インターバル走動作およびハードリン グ動作(以下 1 サイクル動作と表記)を連続的 に分析する必要があると考えられる.しかし,こ れまでの研究は,インターバル走動作またはハー ドリング動作のどちらかに着目して分析したもの が多い.数少ない 1 サイクル動作を分析した研 究として,伊藤・富樫(1997)の大学男子選手 を対象としたハードル走速度と動作の関連を分析 した研究があり,ハードル走速度と有意な相関が 認められたキネマティクスおよびキネティクス的 パラメータは,踏切動作と着地動作に多くみられ たことが報告されている.しかし,1 サイクル各 歩の動作を詳細に分析し,各歩相互の関連につい て考察した研究はみられない. 宮下(1991)が「どの競技者も同じ高さのハー ドルを越えなければならないために,身長特に脚 長に優れていることが非常に有利となる」と述べ ているように,現在の一流110 mH 走選手には高 身長の選手が多い(谷川,2006).しかし,世界 陸上競技選手権大会で 4 度の優勝を果たしてい る Allen Johnson 選手( USA) のよう に,比較 的低身長(1.78 m)でも高いパフォーマンスを 達成している選手も存在している.このような選 手では,高身長の選手とは異なったハードル走技 術を用いていると考えられるが,身長や脚長を考 慮して 1 サイクル動作を分析した研究は見当た らない.選手の形態的特徴を考慮して動作分析を 行うことによって,日本人選手の技術改善の方向 性を示すことができるだろう. そこで,本研究では,一流110 mH 走選手の 1 サイクル区間の動作を分析し,疾走速度および脚 長と関係のあるキネマティクス的特徴を明らかに することを目的とした..
方
法
. 分析対象者 2007年から2008年に開催された公認競技会に おける110 mH レースに参加した男子選手29名を 分析対象者とし,Table 1 にその特性を示した. 分析対象者には,世界記録保持者やオリンピック 優勝者などの世界一流選手,日本選手権優勝者や 日本学生選手権優勝者などの日本一流および学生 一流選手を含んでいた.なお,シーズンベスト記 録(SB)に対する当該競技会における記録(RT) の達成率(SB/RT)が98以上を達成したもの を分析対象とした. . VTR 撮影 110 mH レース中の 6 台目ハードルのリード脚Table 1 Characteristics of the subjects Mean±SD (maxRangemin) Height (m) 1.84±0.05 1.951.77 Leg length (m) 0.85±0.04 0.920.77 Mass (kg) 74.6±6.9 91.060.0 Season best (s) 13.65±0.45 14.3712.92 Time in analyzed race (s) 13.77±0.45 14.4813.02 Achievement ratio () 99.16±0.73 100.098.0 Duration of 1cycle (s) 1.07±0.04 1.141.01 の接地から,7 台目ハードルの踏切脚の接地まで (インターバル区間)を 1 台のデジタル VTR カ メ ラ ( DCR VX2000 ま た は HDR FX1, SONY 社製,撮影ス ピード毎秒60コマ,露 出時間 1 / 1000秒~1/2000秒)を用いて撮影を行った.ま た,7 台目ハードルの踏切脚の接地からハードリ ング後のリード脚の離地まで(ハードリング区間) を 2 台の高速度 VTR カメラ(HSV500C3, NAC 社製,撮影スピード毎秒250コマ,露出時間 1/ 1000秒または Phantom V4.3, Nobby Tech 社製, 撮影スピード毎秒200コマ,露出時間 1/600秒~ 1/5000秒または Exilim EXF1, CASIO 社製,撮 影スピード毎秒300コマ,露出時間 1/1000秒) を用いて撮影を行った.なお,設定した画角の範 囲外であったが,一方の高速度 VTR カメラで撮 影した画像には,撮影した全ての競技会で 6 台 目ハードルのリード脚接地から 7 台目ハードル のリード脚接地までが映っていた. レース中の各区間平均走速度の推移を調べるた め に , 1 台 ま た は 2 台 の デ ジ タ ル VTR カ メ ラ (DCRVX2000, SONY 社製,撮影スピード毎秒 60コマ)を用いて,スタートピストルの閃光を 露出時間 1/60秒で撮影後,露出時間 1/1000秒で 分析対象者の追従撮影を行った. なお,本研究で用いた VTR 画像の一部は,財 日本陸上競技連盟科学委員会によって撮影された ものである. . データ処理 インターバル区間 インターバル区間を対象に,撮影した VTR 画 像から選手の身体計測点25点と,走路の両側に 1 m もしくは 2 m 間隔で設置した較正マークを動 作 分 析装 置 ( Frame-DIAS II, DKH 社 製) を 用 いてデジタイズした.得られた身体の 2 次元座 標を較正マークをもとに実座標に換算した. ハードリング区間 ハードリング区間を対象に,撮影した VTR 画 像から選手の身体計測点25点と,左右方向(X 方向)5.0 m,進行方向(Y 方向)8 m,鉛直方 向(Z 方向)2.5 m の範囲に,X 方向では1.25 m ま た は 2.5m , Y 方 向 で は 2 m, Z 方 向 で は 0.5 m ごとに設置したコントロールポイントを,動作分 析 装 置 ( Frame-DIAS II, DKH 社 製 ) を 用 い 2 コマごとにデジタイズした.2 つの VTR 画像の 身体計測点とコントロールポイントの 2 次元座 標から,DLT 法(Abdel-Aziz and Karara, 1971) により 3 次元実座標を算出した.身体計測点の 3 次元座標値算出における標準誤差の最小値と最大 値は,X 方向0.0060.014 m, Y 方向0.005 0.016 m, Z 方向0.0050.014 m であった.本研 究では,矢状面における 2 次元的な動作を分析 するため,3 次元座標を矢状面 2 次元座標に変換 後,インターバル区間の 2 次元座標と統合した. 平滑化 得られた座標値は,バタワース型デジタルフィ ルタを用いて平滑化した.このときの遮断周波数 は,Wells and Winter (1980) の方法により分析 点の座標成分ごとに決定した(インターバル区 間3.612.6 Hz,ハードリング区間515 Hz). 重心変位および速度 平滑化した身体分析点の座標データから,阿江 (1996)の身体部分慣性係数を用いて身体部分お よび全身の重心座標を算出した.また,身体重心 座標を数値微分することにより身体重心速度を算 出した. レース分析 追従撮影によって得られた映像に VTR タイ マーを映し込み,スタートピストルの閃光,10
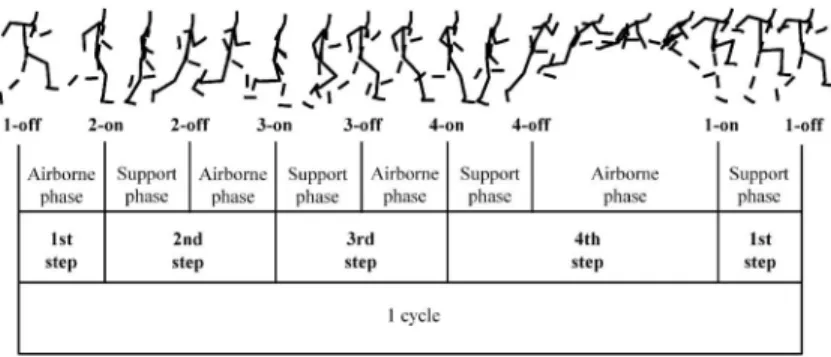
Fig. 1 Classiˆcation of the movements.
Fig. 2 Denitions of the segment angles. 回のハードリング後のリード脚接地時の時刻を読 み取り,各区間タイムを算出した.そして,各区 間タイムをハードル間の距離(9.14 m)で除す ることによって,各区間の平均速度を算出した. また,尾縣(1999)にならい,スタートから 1 台目ハードルまでのアプローチ区間は,着地側の 距離を考慮し1.6 m を加えた15.32 m とし,10台 目ハードルからゴールまでのランイン区間は, 1.6 m を減じた12.42 m として平均速度を算出し た. . 局面分け 本研究では,ハードリング区間の撮影範囲の都 合上,6 台目ハードルのリード脚の離地(1oŠ) から 7 台目ハードルのリード脚の離地(1oŠ) までを 1 サイクルとして,Fig. 1 に示すような動 作時点と局面を定義した. . 算出項目 疾走速度 動作分析の対象とした 6 台目ハードルから 7 台 目 ハ ー ド ル ま で の 1 サ イ ク ル に 要 し た 時 間 を,高速度カメラ(200300 Hz)で撮影されて いた VTR 画像から読み取り,1 インターバルの 距離(9.14 m)を時間で除したものとした. 脚長 ハードリング区間の VTR 画像から得られた各 身体計測点の 3 次元座標から,股関節中心点か ら膝関節中心点までの距離を大腿長,膝関節中心 点から足関節中心点までの距離を下腿長として算 出し,大腿長と下腿長の和を脚長とした. ストライド 接地した足のつま先と次の歩のつま先の水平座 標値の差をストライドとした. ピッチ 接地から次の接地までに要した時間の逆数をピ ッチとした. 下肢の部分角度と角速度 Fig. 2 に示すように,反時計回りを正として大 腿および下腿の部分角度を算出し,さらに数値微 分することで角速度を算出した.本研究では,3 次元的な動作を行っていると考えられる 4 歩目 滞空期(ハードリング)中の踏切脚の動作につい ては考察対象から除外した.なお大腿の角速度 は,正の値を前方スイング,負の値を後方スイン グ,下腿の角速度は正の値を後方回転,負の値を 前方回転と定義した. 踏切距離と着地距離 4oŠ のつま先とハードルの水平座標値の差を
Table 2 Correlation matrix of running velocity and leg length (n=29)
Variables Running velocity Leg length Running velocity ― .557
Leg length ―
: p<.01
Fig. 3 Change in velocity during analyzed races. 踏切距離,ハードルと 1on のつま先の水平座標 値の差を着地距離とした. 支持時間と滞空時間 高速度カメラで撮影した VTR 画像から,各歩 の接地と離地のコマを読み取ることによって,支 持時間と滞空時間を算出した. 4 歩目における水平速度の減速量 4 歩目の接地瞬間の身体重心水平速度と,支持 期中の水平速度の最小値との差を,4 歩目におけ る水平速度の減速量とした. . 規格化および統計処理 疾走速度および脚長と各算出項目の関係性を検 定するために,統計処理ソフト(PASW Statis-tics 18.0, SPSS Inc.)を用いて疾走速度と脚長を 独立変数,各算出項目を従属変数とした重回帰分 析(ステップワイズ法,有意水準 5)を行った. 2 つの独立変数の標準偏回帰係数がともに有意で あった項目に関して,各独立変数の標準偏回帰係 数と,独立変数と従属変数間の相関係数の積を求 めることにより,それぞれの独立変数の寄与率を 算出した.角度および角速度については,各歩の 支持時間,滞空時間の平均値をもとに 1 サイク ル動作を 0100に規格化し(1 歩目滞空期0 5,2 歩目支持期517,2 歩目滞空期17 27,3 歩目支持期2738,3 歩目滞空期 3846,4 歩目支持期4657,4 歩目滞空 期5791,1 歩目支持期91100),規格 化時間 1 ごとに同様に重回帰分析を行った. 後述する結果のグラフでは,疾走速度および脚長 に関して標準偏回帰係数が統計的に有意であった 箇所に×およびをそれぞれ表示した.なお,グ ラフの上部にマークがある場合は従属変数に正の 影響を,グラフの下部にマークがある場合は従属 変数に負の影響を与えていることを示している. また,疾走速度または脚長を独立変数とし,3 歩目のストライド,4oŠ から 2on までの時間 に対する 4 歩目滞空期,1 歩目支持期および滞空 期の各局面時間の割合を従属変数とした単回帰分 析を行った(有意水準 5 ).
.
結
果
. 独立変数間の相関行列 Table 2 は重回帰分析に使用した独立変数の相 関行列を示したものである.疾走速度と脚長の間 に有意な正の相関関係が認められた(p<.01). . レース分析 Fig. 3 は各区間の平均速度を分析対象者の平均 と標準偏差で示したものである.最大速度の出現 が最も多くみられた区間は第 4 インターバルで あり(分析対象者29名中20名),本研究の分析区 間である第 6 インターバルの最大速度区間に対 する達成率は平均98.4であった.この達成率 と,疾走速度および脚長の間に有意な相関関係は 認められなかった. . 基礎パラメータ .. 身体重心速度 Fig. 4 は,1 サイクル区間の身体重心水平速度Fig. 4 Change in horizontal velocity of CG during 1cy-cle motion.
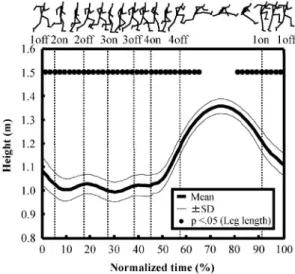
Fig. 5 Change in vertical displacement of CG during 1cycle motion.
Table 3 The eŠects of running velocity and leg length on step length and step frequency Dependent variables
(mean±SD)
Independent variables (b)
R2
Running velocity Leg length
Step length (m) 1st step (1.41±0.08) 2nd step (2.01±0.08) 3rd step (1.87±0.11) 4th step TakeoŠ distance (2.16±0.14) .410 .168 Landing distance (1.63±0.18) -.597 .356 Step frequency (s-1) 1st step (6.83±0.62) 2nd step (4.25±0.27) .746 .557 3rd step (5.08±0.31) 4th step (2.05±0.12) .643 .300 .719 (Contribution ratio .521 .198) : p<.05, : p<.01, : p<.001 の変化を分析対象者の平均とその標準偏差で示し たものである.支持期の速度変化は,1 歩目(91 100)と 3 歩目(2738)でやや加速し,2 歩目(517)で最も加速が大きく,4 歩目(46 57)で減速していた.1 サイクル区間にわた って(0100),疾走速度が大きい選手ほど身 体重心速度が大きかったが,身体重心水平速度と 脚長との間に有意な相関関係は認められなかった. .. 身体重心高 Fig. 5 は,1 サイクル区間の身体重心高の変化 を分析対象者の平均とその標準偏差で示したもの である.ハードリング以外のほとんどの区間にわ たって(068,81100),脚長が長い選手ほ ど身体重心高が高かった. .. ストライド,ピッチ Table 3 は,各歩のストライド,ピッチを従属 変数,疾走速度と脚長を独立変数とした重回帰分
Fig. 6 Relationship between step length at 3rd step and average horizontal velocity (above) and Leg length (below).
Table 4 The eŠects of running velocity and leg length on durations of support and airborne phases Dependent variables
(mean±SD)
Independent variables (b)
R2
Running velocity Leg length
Durations of support and airborne phases (s)
1support (0.09±0.01) -.564 .318 1airborne (0.05±0.01) .459 .211 2support (0.13±0.01) -.677 .458 2airborne (0.11±0.01) -.484 .234 3support (0.12±0.01) 3airborne (0.08±0.01) 4support (0.13±0.01) 4airborne (0.36±0.03) -.510 -.399 .646 (Contribution ratio .373 .273) : p<.05, : p<.01, : p<.001 析の結果を示したものである.表中の b はそれ ぞれの独立変数の標準偏回帰係数を示しており, b が正の値であれば独立変数が大きいほど従属変 数が大きく,負の値であれば独立変数が大きいほ ど従属変数が小さくなることを示している.2 つ の独立変数の標準偏回帰係数がともに有意であっ た項目に関しては,各独立変数の寄与率を項目下 の括弧内に示した. 2 歩目では,疾走速度が大きい選手ほどピッチ が高かった.4 歩目のピッチは,疾走速度が大き い選手ほど高く,また脚長が長い選手ほど高かっ た.このとき,より疾走速度の寄与率が高かった. 4 歩目のストライドは,脚長の長い選手ほど踏切 距離が長く,着地距離が短かった. Fig. 6 は,3 歩目のストライドと疾走速度およ び脚長の関係を示したものである.両者の間に有 意な相関関係は認められなかった. .. 支持および滞空時間 Table 4 は各歩の支持時間,滞空時間を従属変 数,疾走速度と脚長を独立変数とした重回帰分析 の結果を Table 3 と同様に示したものである.1 歩目支持期,2 歩目支持期および滞空期の時間 は,疾走速度の大きい選手ほど短かった.1 歩目 滞空期の時間は,脚長の長い選手ほど長かった. 4 歩目滞空期の時間は,疾走速度が大きい選手ほ ど短く,また脚長が長い選手ほど短かった.この とき,より疾走速度の寄与率が高かった.
Table 5 The eŠects of running velocity and leg length on vertical velocities of CG at touchdown and takeoŠ and change of horizontal CG velocity during 4th step
Dependent variables (mean±SD)
Independent variables (b)
R2
Running velocity Leg length
Vertical velocities of CG (m/s) 1st step on (-1.40±0.20) .380 .450 .538 (Contribution ratio .240 .298) oŠ (-0.92±0.20) 2nd step on (-0.90±0.23) oŠ (0.21±0.14) -.513 .263 3rd step on (-0.34±0.10) oŠ (0.20±0.17) 4th step on (-0.19±0.13) oŠ (1.96±0.14) -.508 .258 Change in horizontal CG velocity (m/s) 4th step (0.51±0.17) : p<.05, : p<.01, : p<.001 .. 身体重心鉛直速度,歩目における水 平速度の減速量 Table 5 は各歩の接地時および離地時の身体重 心鉛直速度,4 歩目における水平速度の減速量を 従属変数,疾走速度と脚長を独立変数とした重回 帰分析の結果を Table 3 と同様に示したものであ る.1 歩目接地時の身体重心鉛直速度は,疾走速 度が大きい選手ほど大きく,また脚長が長い選手 ほど大きかった.このとき,より脚長の寄与率が 高かった.2 歩目離地時の身体重心鉛直速度は, 疾走速度が大きい選手ほど小さかった.4 歩目離 地時の身体重心鉛直速度は,脚長の長い選手ほど 小さかった. 疾走速度および脚長に,4 歩目における水平速 度の減速量に対する有意な相関はみられなかった. .. oŠ からon までの各支持期および 滞空期時間の割合
Fig. 7 は,脚長と 4oŠ から 2on までの時間 に対する 4 歩目滞空期,1 歩目支持期および滞空 期の各局面時間の割合の関係を示したものである. 4oŠ から 2on までの時間に対する 4 歩目滞空 期の時間の割合は,脚長の長い選手ほど小さく, 1 歩目滞空期の時間の割合は,脚長の長い選手ほ ど大きかった.脚長と 1 歩目支持期の時間の割 合には,有意な相関関係は認められなかった. . 下肢のキネマティクス .. リード脚の動作 Fig. 8 は 1 サイクル区間のリード脚下腿および 大腿の角度,角速度の変化を,分析対象者の平均 と標準偏差で示したものである. 2 歩目支持期から滞空期(1420)において, 疾走速度が大きい選手ほど大腿の角速度が有意に 小さく,2 歩目滞空期(1925)の大腿角度が 有意に小さかった. 1 歩目接地前から支持期において(8892, 9599),疾走速度が大きい選手ほど下腿の前 方回転角速度が有意に大きく,支持期(9599) の大腿角速度が有意に大きかった. .. 踏切脚の動作 Fig. 9 は 1 サイクル区間の踏切脚下腿および大 腿の角度,角速度の変化を,分析対象者の平均と 標準偏差で示したものである. 1 歩目滞空期から 2 歩目支持期(49)にお いて,疾走速度が大きい選手ほど大腿角度が有意 に小さく,2 歩目接地時では値が 0 に近く,大腿 部がより鉛直に近かった.2 歩目支持期(1115 )において,疾走速度が大きい選手ほど下腿の
Fig. 7 Relationship between leg length and the ratio of durations of airborne phase at 4th step (above), support phase at 1st step (mid) and airborne phase at 1st step (below) divided by duration from 4oŠ to 2on.
前方回転角速度が有意に大きく,ほぼ同じ局面に おいて(1215)大腿の後方スイング角速度が 有意に小さかった.2 歩目支持期から滞空期(14 21)において,疾走速度が大きい選手ほど大 腿角度が有意に大きかった. 3 歩目支持期から滞空期(3339)において, 脚長の長い選手ほど大腿角度が有意に小さく,3 歩目滞空期から 4 歩目支持期(4349)の大腿 後方スイング角速度が有意に小さかった. 1 歩目支持期(94100)において,疾走速度 が大きい選手ほど大腿後方スイング角速度が大き く,ほぼ同じ局面(91100)において脚長の 長い選手ほど大腿角度が有意に大きかった.
.
考
察
. 本研究の分析区間について Susanka (1990) は,110 mH 走において,最 大速度区間に対する達成率が97以上の区間を 速度維持区間としている.本研究の分析区間であ る 6 台目ハードルから 7 台目ハードルにおける 達成率は平均98.4であり,達成率と疾走速度に 有意な相関がみられなかったことに加え,達成率 が97未満の選手は29名中 4 名であったことか ら,本研究の分析区間は速度維持区間に該当して いたといえる. . 各歩のキネマティクス的特徴 .. 歩目(支持脚踏切脚) ピッチと疾走速度には有意な相関が認められた が,ストライドと疾走速度に有意な相関がみられ なかったことから(Table 3),2 歩目において大 きい速度で疾走するためには,高いピッチを獲得 する必要があると考えられる. 疾走速度の大きい選手は,短い支持時間で疾走 するために(Table 4),接地時に踏切脚の大腿が より鉛直に近く,ハードリングからの振り下ろし によって生じた大腿の大きな後方スイング角速度 を支持期の後半に再増加させないことによって, 大腿の動作範囲を小さくしていた(Fig. 9).ま た,支持期後半の踏切脚下腿の前方回転角速度が 大きく,大腿の後方スイング角速度が小さかった ことから(Fig. 9),膝関節の伸展が小さくなり, 離地時の身体重心鉛直速度が小さかったと考えら れる(Table 5).さらに,支持期から滞空期にか けて,疾走速度の大きい選手ほどリード脚の大腿 角速度が小さかったことから(Fig. 8),次の歩 を素早く接地することができ,滞空時間を短くす ることができていたと考えられる(Table 4). 伊藤・富樫(1997)は,大学男子ハードル走 選手の 1 サイクル動作を分析し,2 歩目支持期のFig. 8 Changes in the angles and angular velocities of shank and thigh of lead leg during 1cycle motion. 関節トルクの変化について報告している.それに よると,2 歩目支持期の踏切脚では,コンセント リックな筋活動により股関節伸展トルクを発揮 し,離地直前に屈曲トルクに切り替わっていた. また,馬場ほか(2000)は,短距離走の関節ト ルクについて,疾走速度が大きくなると,支持期 の股関節屈曲トルク発揮が徐々に早くなることを 報告している.詳細についてはキネティクス的分 析を行う必要があるが,本研究の結果とあわせて 考えると,疾走速度の大きい選手は大腿をより鉛 直に近い姿勢で接地することにより,接地時の股 関節伸展トルクを小さくし,スプリント走と同様 に支持期の屈曲トルクへの切り替えが早かった可 能性がある.そして支持期後半の大腿後方スイン グ角速度を小さくでき,大腿の動作範囲を小さく していたと考えられる.これらのことは,スプリ ント走能力,特に股関節屈曲筋群の強化によって 2 歩目のピッチを向上させることができる可能性 を示していると考えられる. さらに,ストライドの標準偏差が小さく,疾走 速度および脚長に有意な相関がみられなかったこ とから(Table 3),2 歩目では疾走速度や脚長に 関 わ ら ず 2 m 前 後 の ス ト ラ イ ド を 獲 得 し て い た.脚長の長い選手ほどストライドの獲得が容易 であると考えられるため,脚長の短い選手が 2 歩目で高いピッチを獲得するには,谷川(2006) が身長の低い選手(178183 cm)を Speed 型と 分類しているように,スプリント走能力,特に短 い支持時間でより大きい加速力を発揮することの できる能力が必要とされるであろう. .. 歩目(支持脚リード脚)
Fig. 9 Changes in the angles and angular velocities of shank and thigh of takeoŠ leg during 1cycle mo-tion. 切準備局面のストライドパターンに関して,最後 の 1 歩は 2 歩前の84.597.5となることを報告 している.本研究では 2 歩目に対する 3 歩目の ストライド長が平均93.5であり,身体重心が 1 サイクル中に最も低くなることから(Fig. 5), 谷川ほか(2002)が報告しているように,3 歩目 では走り幅跳びと同様に踏切準備動作を行ってい たと考えられる.また,3 歩目では 2 歩目とは異 なり,支持脚であるリード脚の動作と疾走速度と の相関がほとんどみられなかった(Fig. 8).こ れは,3 歩目のストライド長が疾走速度や脚長に 関 わ ら ず , 選 手 に よ っ て 様 々 で あ っ た た め に (Fig. 6),3 歩目では踏切準備動作を行うととも に,1 サイクル動作においてストライドを調整す る役割も担っていたことを示していると考えられ る. 山田(1990)はハードル走の踏切支持期中の 地面反力を変化させるシミュレーションを行い, 離地時の鉛直速度獲得には接地直後に生じる鉛直 成分の第 1 ピークが必要であると述べている. また,阿江ほか(1991)は,スプリント走の地 面反力に関して,鉛直地面反力に第 1 ピークが みられた被験者では,最大下スピードにおける接 地時の膝関節角度は,第 1 ピークがみられない 被験者よりも大きかったことを報告している.本 研究では,4 歩目接地時の下肢の角度と脚長に有 意な相関がみられなかったものの,脚長の短い選 手ほど 3 歩目の離地前後の踏切脚大腿の振り上 げが大きく,滞空期の大腿後方スイング角速度が 大きかったことから(Fig. 9),4 歩目接地直後の
鉛直地面反力第 1 ピークを大きくするための踏 切準備動作を 3 歩目で行っていたと考えられる. 以上のことから,3 歩目はストライドの調整と ハードリングの踏切準備動作を行う歩であり,脚 長の短い選手ほど 4 歩目接地直後の地面反力鉛 直成分を大きくするための踏切準備動作を行って いたと考えられる. .. 歩目(支持脚踏切脚) 4 歩目(ハードリング動作)は,Hay (1986) の走り幅跳びの報告と同様に,支持期中に大きく 減速しながら(Fig. 4),身体重心を上昇させる 踏切動作を行う歩である.脚長の長い選手ほど踏 切距離が長く,着地距離が短かったことは(Ta-ble 3),宮下(1991)が述べているように,主と して身体の幾何学的条件によって踏切距離や着地 距離が決まることを示していると考えられる.疾 走速度が大きく脚長の長い選手は,滞空時間が短 く,高いピッチを達成しており,疾走速度がより 大きく影響していた(Table 3 および Table 4). 滞空時間が短かった要因は,疾走速度の大きい選 手は滞空期の平均速度が大きかったためであり, また脚長の長い選手ではハードルを越えるために 必要な身体重心の上昇幅が小さく(Fig. 5),4 歩 目離地時の身体重心鉛直速度が小さかったためで ある(Table 5).Hay (1986) は,走り幅跳びの 踏切において,鉛直速度の増加量と水平速度の減 少量との間に正の相関関係があることを報告して いる.脚長の短い選手は,踏切でより大きい鉛直 方向の速度を獲得する必要があったため,支持期 の水平速度の減少が大きくなると予想されるが, 本 研 究 で は そ の よ う な 傾 向 が み ら れ な か っ た (Table 5).この理由として,脚長の短い選手ほ ど3 歩目の滞空期で踏切の地面反力第 1 ピークを 大きくする動作を行っており,本研究の分析対象 者程度の身長があれば,踏切支持期でそれほど大 きく減速する必要がなかったと考えられる.また, 4 歩目の動作に関しては,踏切脚の 3 次元的な動 作を含めてさらに検討する必要があるだろう. .. 歩目(支持脚リード脚) 疾 走 速 度 が 大 き い 選 手 ほ ど 支 持 時 間 が 短 く (Table 4),支持期のリード脚下腿前方回転角速 度が大きかった(Fig. 8).また,接地時の負の 身体重心鉛直速度は,疾走速度が大きく脚長の長 い選手ほど小さく,脚長の影響がやや大きかった (Table 5).伊藤・富樫(1997)は,1 歩目支持 期前半における足関節の負の仕事量と平均パワー は,ハードル走速度が大きい選手ほど小さいこと を報告している.本研究において,脚長が短く疾 走速度が小さい選手は,1 歩目接地時の大きな負 の身体重心鉛直速度に抗するために,1 歩目支持 期の力積を大きくする必要があった.そのために は,足関節で大きな伸展力を発揮するか,または 支持時間を長くすることになるが,疾走速度が大 きい選手ほど支持時間が短く,脚長と 1 歩目の 支 持 時 間 に は 有 意 な 相 関 が み ら れ な か っ た (Table 4).したがって,脚長が長く疾走速度が 大きい選手は,結果的に足関節の負の仕事が小さ くなっていたと考えられる.そして疾走速度が大 きい選手のように 1 歩目の支持時間を短くする ことは,支持期中の身体重心の落下を抑え,2 歩 目の接地時に大腿を鉛直に近い姿勢で接地するこ とに貢献していたと考えられる.また,疾走速度 が大きい選手は,支持期中に踏切脚大腿の後方ス イング角速度を大きくすることによって,短い支 持時間での踏切脚の振り下ろしを可能にしていた と考えられる.これらのことから,1 歩目では短 い支持時間で身体重心の落下を抑えることが重要 であり,脚長の長い選手は,身体的特徴から支持 時間を短くしやすかったと考えられる. しかし,脚長の長い選手は,1 歩目支持期の踏 切脚大腿角度が大きかったことから(Fig. 9), 振り下ろしに時間を要していた.その結果,1 歩 目の滞空時間が長くなり(Table 4),踏切脚の離 地から接地まで(4oŠ から 2on まで)の所要 時間と脚長には有意な相関はみられなかった.2 歩目および 3 歩目の所要時間と脚長には有意な 相関がみられなかったことから(Table 4),疾走 速度を一定とすれば,脚長の長短によって,4 歩 目から 1 歩目までの時間の配分が異なっていた と考えられる.4 歩目滞空期(4air),1 歩目支 持期(1sup)および滞空期(1air)の時間は, 結果で示した単回帰式を用いて(Fig. 7),以下
のような式で表すことができる.
DT4air=Dt4off2on×(0.430x+1.076) ◯
DT1air=Dt4off2on×(0.330x-0.174) ◯
DT1sup=Dt4off2on-(DT4air+DT1air) ◯
ここで,DT は 4air, 1sup, 1air の各局面に 要した時間,Dt4off2onは 4oŠ から 2on までに
要した時間,x は脚長である.上記の式では,脚 長が長いほど 4air の時間が短く,1air の時間 が長くなる.上記の式を用いることにより,本研 究の分析対象者と近い身体特性および競技力を持 った選手であれば,4oŠ から 2on までの時間 配分を評価できるだろう.例えば,本研究の分析 対象者の一人(脚長0.81 m, 1 サイクル時間 1.12 s,Dt4off2on: 0.54 s)に上記の式を用いて理
論値を計算すると,4air, 1sup, 1air の時間は それぞれ0.39 s,0.10 s,0.05 sと算出できる.し かし,実測値はそれぞれ0.41 s, 0.10 s, 0.03 s で あり,理論値に比べて 4air の時間が長く,1air は短かった.実測値と理論値に差が生じた要因と して,この選手は着地距離が平均値(Table 3) よりも大きく(1.84 m),1 歩目のストライドは 小さかったことから(1.25 m),リード脚の振り 下ろし動作のタイミングが遅れていたことなどが 考えられる.これらのことから,◯から◯の式を 用いることで,4oŠ から 2on までの選手の特 徴を示すことができ,その他のパラメータと併せ て考察することによって,選手の課題を示すこと ができる可能性がある. また,4oŠ から 2on に要する時間の目標値 を入力することで,目標とすべき 4oŠ から 2 on まで の 時間 配 分を 具 体的 に 算出 で きる だ ろ う.例えば,前述の選手の場合,4oŠ から 2on までにかかった時間を0.49 s に短縮するためには, 4air, 1sup, 1air の時間をそれぞれ0.36 s, 0.09 s, 0.04 s とする必要がある.これらの時間的情報 は,選手のトレーニングに有益な示唆を与えるこ とができる可能性がある. . サイクル動作の特徴 McDonald (2002) は,1 サイクルの各歩の役 割について検討し,1 歩目では着地動作を行い, 2 歩目では加速し,3 歩目で踏切準備を行い,4 歩目で踏切動作を行うことを明らかにしており, 本研究においても同様の結果が得られた.その役 割から,1 歩目と 3 歩目では大きく加速できない と考えられるため,1 サイクルを短い時間で疾走 するには,2 歩目における加速が重要となる.加 速するためには地面に対して力積を作用させる必 要があることから,疾走速度の大きい選手は短い 時間でより大きな力を発揮する能力に優れてお り,結果として 2 歩目で高いピッチを獲得して いたと考えられる.また,2 歩目の考察でも述べ たように,疾走速度や脚長に関わらず 2 m 前後 のストライドを獲得する必要があったことから, 脚長の短い選手はより大きな加速力を発揮できる 能力が必要となるだろう. 以上のことから,疾走速度の大きい選手は,2 歩目において短い時間で大きい力を発揮する能力 が優れていたために,1 サイクル時間を短くする ことができていたと考えられる.また,加速区間 (Approach から第 3 インターバルまで)や,減 速区間(第 7 インターバル以降)では(Fig. 3), 本研究で述べた 1 サイクル動作における各歩の 関係が異なっている可能性があるため,今後は複 数区間における 1 サイクル動作の変容について も検討する必要があるだろう.
.
ま
と
め
本研究の目的は,一流110 mH 走選手の 1 サイ クル区間の動作を分析し,疾走速度および脚長と 関係のあるキネマティクス的特徴を明らかにする ことであった.得られた結果をまとめると,以下 のようになる. ◯ 本研究の分析区間である第 6 インターバル は,一流選手では速度維持区間に該当していた. ◯ 2 歩目では,疾走速度の大きい選手ほど支持 期における踏切脚の大腿の動作範囲が小さく, 高いピッチで疾走していた. ◯ 3 歩目はストライドの調整とハードリングの 踏切準備動作を行う歩であり,脚長の短い選手ほど 4 歩目接地直後の地面反力鉛直成分を大 きくするための踏切準備動作を行っていた. ◯ 4 歩目から 1 歩目までの時間は,脚長の長短 によって配分が異なり,回帰式を用いて時間配 分の指標となる式を提示することができた. ◯ 1 歩目では,疾走速度の大きい選手ほど支持 時間が短いことによって身体重心の落下を抑え ており,支持期中に踏切脚大腿を振り下ろす角 速度が大きかったことによって,2 歩目接地時 に踏切脚の大腿を鉛直に近い姿勢で接地するこ とができた. 以上のことから,疾走速度が大きい選手ほど 2 歩目で高いピッチを獲得し,短い時間で加速して いたために,1 サイクルの動作時間を短くするこ とができていたと考えられる.また,2 歩目では 2 m 前後のストライドを獲得する必要があったこ とから,脚長の短い選手はより大きな加速力を発 揮できる能力が必要となるだろう. 文 献
Abdel-Aziz, Y.I. and Karara, H.M. (1971) Direct linear transformation from comparator coordinates into ob-ject space coordinates in close-range photogrammet-ry. Proceedings of the Symposium on Close-Range Photogrammetry, American Society of Photogram-metry: Falls Church, pp. 118.
阿江通良・宮下 憲・大木昭一郎(1991)スプリント 走の地面反力.陸上競技研究,7: 210.
阿江通良(1996)日本人幼少年およびアスリートの身 体部分慣性特性.Japanese Journal of Sports Science, 15(3): 155162.
馬場崇豪・和田幸洋・伊藤 章(2000)短距離走の筋 活動様式.体育学研究,45(2): 186200.
Hay, J.G. (1986) The biomechanics of the long jump. Exercise & Sport Sciences Reviews, 14: 401446. 礒 繁雄・榎本靖士・中田和寿・羽田雄一・阿江通良 (2002)一流110 m ハードル選手のインターバル走に 関するキネマティクス的研究.陸上競技研究,49: 1117. 伊藤 章・富樫 勝(1997)ハードル走のバイオメカ ニクス的研究スプリント走との比較.体育学研究, 42(4): 246260.
McDonald, C. (2002) Hurdling Is Not Sprinting. Track Coach, 161: 51375143. 宮下 憲(1991)最新陸上競技入門シリーズ 4『ハー ドル』.ベースボールマガジン社東京,pp. 962. 森田正利・伊藤 章・沼澤秀雄・小木曽一之・安井年 文(1994)スプリントハードル(110 mH・100 mH) および男女400 mH のレース分析.佐々木秀幸ほか 監修 日本陸上競技連盟強化本部バイオメカニクス 研究班編 世界一流陸上競技者の技術.ベースボー ルマガジン社東京,pp. 6687. 尾縣 貢(1999)T&F サイエンス講座 ハードルレー ス中のスピード変化.陸上競技マガジン,49(13): 196197. 大橋祐二・横澤俊治・門野洋介・藤井範久・阿江通良 (2006)男子一流110 m ハードル選手の踏切および踏 切準備動作に関するバイオメカニクス的分析.陸上 競技研究紀要,2: 9599.
Susanka, P. (1990) Presentation of biomechanical knowledge of hurdle running. In: Br äugemann, G.P., and R äuhl, J.K. (Eds.), Technique in athletics 1 The ˆrst international conference. I.A.A.F.: K äoln, pp. 49 62. 谷川 聡・宮下 憲・高松潤二・安井年文・金子公宏 (2002)ハイハードル走のインターバルランニングに 関する研究.スプリント研究,12: 4353. 谷川 聡(2006)世界トップレベルから見た110 m ハー ドル競走の競技特性.スプリント研究,16: 2440. Weidner, W. and Dickwach, H. (1990) Characteristics
of the Long Jump Technique. Modern Athlete & Coach, 28: 36.
Wells, R.P. and Winter, D.A. (1980) Assessment of sig-nal noise in the kinematics of normal, pathological and sporting gaits. Human locomotion, 1: 3641. 山田憲政(1990)ハードル走の踏切における減速成分
の分析.日本バイオメカニクス学会編 ジャンプ研 究.メディカルプレス東京,pp. 4651.