天体力学 III 講義ノート
堀源一郎
Contents
1
質点系としての剛体3
1.1 束縛条件 . . . . 3
1.2 Newton の運動の法則 . . . . 4
1.3 角運動量の保存 . . . . 5
1.4 仕事とエネルギー . . . . 6
1.5 剛体の運動 . . . . 7
2
慣性能率9 2.1 慣性能率(面,線,点に関する) . . . . 9
2.2 方向による I の変化 . . . 10
2.3 慣性楕円体の性質 . . . 12
2.3.1 A ≤ B ≤ C i.e a ≥ b ≥ c . . . 12
2.3.2 中心慣性楕円体 . . . 13
2.4 中心楕円体の座標軸 . . . 14
2.5 主点 . . . 18
2.5.1 中心楕円体が球 . . . 18
2.5.2 中心楕円体が球でないとき . . . 19
2.6 回転の楕円体 . . . 21
3
オイラーの運動方程式22 3.1 歴史 . . . 22
3.2 剛体の変位 . . . 22
3.2.1 固定軸の回りの回転による変位 . . . 22
3.2.2 剛体の変位 ( 一般的 ) . . . 23
3.3 固定点の回りの運動 . . . 26
3.3.1 角速度 . . . 26
3.3.2 角運動量と運動エネルギー . . . 27
3.3.3 i, j, k を慣性主軸にとる . . . 29
1
2
3.3.4 N ~ = MV~r G ~g の場合 . . . 32
3.3.5 支持点 O に働く束縛力 . . . 34
3.3.6 オイラー角の時間変化 . . . 38
3.3.7 D = C の場合 . . . 40
3.3.8 A = B < C ( 扁球 ) . . . 41
3.3.9 Poinsot の方法 . . . 42
3.3.10 ポルホードとハーポルホード . . . 45
4
正準方程式47 4.1 オイラー角 . . . 47
4.2 Andoyer(アンドワイエ) 変数 . . . 48
4.3 重心の回りの自由回転 . . . 52
4.3.1 A = B の場合 . . . 52
4.3.2 A 6 = B < C の場合 . . . 52
4.4 有限 2 体問題 . . . 56
4.4.1 M 2 の公転運動 . . . 60
4.4.2 M j の自転運動 . . . 61
4.5 U の展開 . . . 62
4.6 地球の自転運動 . . . 67
4.7 水星の自転運動 . . . 71
4.8 非剛体の効果 . . . 75
1 質点系としての剛体 3
1 質点系としての剛体
1.1 束縛条件
束縛のある質点系として剛体を見る.
| ~r j − ~r k | = r jk = const. (1) 束縛条件の数
m
m r
r
k
j k
j
Figure 1: 質点系としての剛体
n C 2 = n(n − 1)
2 (2)
独立な数は?
• 4 質点:
4 C 2 = 6 (3)
すべて独立.一辺だけを動かせる (Local に ) .
• 5 質点:
5 C 2 = 10 (4)
すべて独立ではない.E は BCD からの距離で決まる.すると n 個
6 + 4 束縛
6 + 3 独立な束縛
Table 1: 束縛
1 質点系としての剛体 4
A
B
C
D
Figure 2: 4 質点 A
B
C
D
E
Figure 3: 5 質点
束縛: 6 + 4 + 5 + · · · + n − 1 = n(n − 1)
2 (5)
独立な束縛 6 + 3 + 3 + · · · + 3
| {z }
n−4
= 3n − 6 (6)
よって,剛体の自由度は,
3n − (3n − 6) = 6 (7)
6 = 3
重心の位置 |{z}
+ 2
軸方向 |{z}
+ 1 |{z}
回転
(8)
1.2 Newton の運動の法則
m j ~ ¨ r j = f ~ j (9)
f ~ j = f ~ j (i) 質点同士の力 |{z}
+ f ~ j (e) (10)
1 質点系としての剛体 5 f ~ j (i) = X
k6=j
f ~ jk ⇒ 束縛力 (11)
f ~ jk = − f ~ Kj ∝ ~r j − ~r k (12) よって,束縛力は 1 ,
X f ~ j (i) = 0 定義より (13) 重心の運動 2
M~ r ¨ G = f ~ j (e) = vecf (14) d
dt (M ~ dotr G ) = f ~ (15)
1.3 角運動量の保存
X m j (~r j × ~ r ¨ j ) = X ~r j × f ~ j (i) + X ~r j × f ~ j (e) = X ~r j × f ~ (e) (16)
X (~r j × f ~ j ) = X
j>k
~r j × f ~ j + X
k>j
~r k × ~k k
= X
j>k
~r j × f ~ j − X
k>j
~r j × f ~ j
= X
j>j
(~r j+k − ~r j−k ) × f ~ j+k (k → − k)
= X (~r j−k − ~r j+k ) × f ~ j−k ( f ~ j+k = − f ~ j−k )
= X (~r k × f ~ k ) = 0 (17)
よって,
d dt
X
j
m j ~r j × ~ r ˙ j
= X
j
~r j × f ~ j
(18)
~ ˙
G = N ~ (19)
原点に対する Moment の保存.勿論,単位ベクトルとの内積を取れば,固定軸 A(~a) に ついて軸まわりの Moment の保存.
~a · G ~ ˙ = ~a · N ~ (20)
N ~ に直交な軸のまわりの Moment は保存される.
さらに,重心を通る軸の回りに Moment は保存される ( 重心は動いても良い.固定軸では ない).
(21)
1
束縛力の大きさは剛体の運動によって変わる.2
分裂すれば~ r j
が変わるので,f ~ j (e)
が異なるので,重心の運動は変わる.1 質点系としての剛体 6
~r j = ~r G + ~ ρ j
~r j × ~ r ˙ j = ~r G × ~ r ˙ G + ~r G × ~ ρ ˙ j + ~ ρ j × ~ r ˙ G + ~ ρ × ~ ρ ˙ j
P m j を施すと,
X m j
~r j × ~ r ˙ j
= M~r G × ~ r ˙ G + X m j ~ ρ j × ~ ρ ˙ j (22) ( X m j ~r G = 0, X ~ r ˙ G = 0)
d
dt を施して,
M~r G × ~ r ¨ G + d dt
X m j rho ~ j × ~ ρ ˙ j
= ~r G × X
j
f ~ j (e) + X
j
~
ρ j × f ~ j (e)
M~ r ¨ G = X f ~ j (e) = f ~ より,
d dt
X m j
~ ρ j × ~ ρ ˙ j = X ~ ρ j × f ~ j (e) (23)
1.4 仕事とエネルギー
(10) より,
X m j ~r j · ~ r ¨ j = X ~r j · f ~ j (i) + ~r j · f ~ j (e) (24) t で積分して,
1 2
X m j
~ r ˙ j
2
− 1 2
X m j ~ r ˙ j
2 0 =
Z t
0
X
~r j · f ~ j (i)
| {z }
6=0
+~r j · f ~ (e)
dt (25) これはエネルギーの保存. ~r j = ~r G + ρ ~ j と置くと,
~ r ˙ j
2
= ~ r ˙ 2 G + 2 ~ r ˙ G · ~ ρ ˙ j + ~ ρ ˙ 2 j (26) 代入すれば,
1 2
X m j
~ r ˙ j
2
= 1
2 M ( ~ r ˙ G ) 2
| {z }
外部運動エネルギー
+ 1
2
X m j ( ~ ρ ˙ j ) 2
| {z }
内部運動エネルギー
(27)
(14) より,
M~ r ˙ G · ~ r ¨ G = X ~ r ˙ G · f ~ j (e) (28)
1 質点系としての剛体 7 代入すれば,
1
2 M~ r ˙ 2 G −
1 2 M~ r ˙ G
2
| {z 0 }
外部運動エネルギーの変化
=
Z X f ~ j (e) d~r G
| {z }
外力が重心の変化に対して行った外部仕事
d~r G
dt dt = d~r G
!
(29)
(25) の右辺,
Z X f ~ j (i) + f ~ j (e) · (d~r G + d~ ρ j )
=
Z X f ~ j (i) · d~r G
| {z }
=0
+
Z X f ~ j (e) · d~r G
| {z }
外力の外部仕事 +
Z X
( f ~ j (i) + f ~ j (e) ) · d~ ρ j
| {z }
内部仕事
(30)
Z X f ~ j (i) · d~ ρ j 内力の内部仕事 (31)
Z X f ~ j (e) · d~ ρ j 内力の外部仕事 (32) これより,
1 2
X m j ~ ρ ˙ 2 j − 1 2
X
m j ~ ρ ˙ 2 j
| {z 0 }
内部運動エネルギーの変化
=
Z X f ~ j (i) + f ~ j (e) · d~ ρ j
| {z }
内部仕事
(33)
剛体では,
Z X f ~ j (i) · d~ ρ j = 0 (34) 太陽系に働く外力では,平行とみなせるので,
f ~ j (e) = m j f ~ →
Z X f ~ j (e) · d~ ρ j = f ~ ·
Z
m j d~ ρ j = 0 (35) 内部に対して仕事はしない.ただし,近くを恒星が通るときは別である.
1.5 剛体の運動
(14) より,
M~ r ¨ G = f ~ = X f ~ j (e) (36)
• 偶力は重心の運動に関与しない.
• 放物体の重心は放物線を描く
f ~ j (e) = − k 2 m j ~r j (37) のとき 3 ,
M~ ¨ r G = − k 2 M~r G ⇒ ~ ¨ r G = − k 2 ~r G (harmonic motion) (38)
3 f ∝ r 1
2 のときはこうは行かない.1 質点系としての剛体 8 (19) から,
G ~ = X m j
~r j × ~ r ˙ j
= M ~r G × ~ r ˙ G + X m j ρ ~ j × ~ ρ ˙ j (39) 特に,
• f ~ j (e) の性質: f ~ = P m j f ~ j (e) が剛体の向きによらないならば,並進運動(重心の運動)
は自転に影響されない( f ~ にのみよるから).
また,
• vecG が剛体の位置(重心の位置)によらないならば,自転は並進運動に影響され ない.
(29) から,
1 2 M~ r ˙ 2 G
t 0
=
Z t
0
f ~ · d~r G (40)
剛体の自由落下,
1
2 M (v 2 − v 0 2 ) =
Z t
0 M~g · d~r G
= M g
Z
dh = M g h 落差 |{z}
(41) (33) から,
1 2
X m j ~ ρ ˙ 2 j
t 0
=
Z t 0
X f ~ j (e) · d~ ρ j (42) すなわち,剛体では内部の内部仕事はゼロ.
f ~ j (i) = X
k
f ~ jk , f ~ jk = − f ~ kj (43) f ~ jk と f ~ kj がなす仕事を W jk とすると,
dW jk = f ~ jk · d~ ρ j + f ~ kj · d~ ρ k = f ~ jk (d~ ρ j − d~ ρ k ) (44) (~ ρ j − ρ ~ k ) 2 = 一定 だから(束縛力の定義),
(~ ρ j − ~ ρ k ) · ~ r ˙ j − ~ r ˙ k = 0 (45) よって,
f ~ jk ∝ ~r j − ~r k = ~ ρ j − ~ ρ k ⇒ f ~ jk · (~ ρ j − ~ ρ k ) = 0 (46) したがって,
dW jk = 0 ⇒
Z X f ~ j (i) · d~ ρ j = X
j>k
W jk = 0 (47)
外力の
外部 内部
仕事は,剛体の
外部 内部
運動エネルギーの変化に等しい.
2 慣性能率 9
2 慣性能率
2.1 慣性能率(面,線,点に関する)
x y
z
m p
j
j
Figure 4: 慣性能率
I = X m j p 2 j , p j : m j と面,線,点との距離 (48) 面:
I yz = X m j x 2 j , I zx = X m j y j 2 , I xy = X m j z 2 j (49) 軸: 4
A ≡ I x = P m j
y j 2 + z j 2 = I zx + I xy
B ≡ I y = P m j
z j 2 + x 2 j = I xy + I yz
C ≡ I z = P m j
x 2 j + y j 2 = I yz + I zx
(50)
原点:
I 0 = X m j
x 2 j + y 2 j + z j 2 = I xy + I yz + I zx = 1
2 (A + B + C) (51) 慣性積:
D ≡ P x = P m j y j z j E ≡ P y = P m j z j x j
F ≡ P z = P m j x j y j
(52)
これより直ちに,
I x > 2P x , I y > 2P y , I z > 2P z , I 0 > P x + P y + P z (53)
4
I xy = A + B + C
2 − C, I yz = A + B + C
2 − A, I zx = A + B + C
2 − B
2 慣性能率 10
回転半径:k∗
I ∗ = M k 2 ∗ なる k ∗ , M X m j (54) k ∗ は I ∗ による.
主回転半径:k
0 面,線,点が重心を含むとき k ∗ = k 0 .平行に p だけ動かせば
k 2 = k 0 2 + p 2 → k ≥ k 0 (55) ただちに,
I ≥ I p , I = M k 2 , I p = M k 0 2 (56) よって,平行移動で I p を minimum にするには重心を通れば良い.
2.2 方向による I の変化
回転移動で I はどう変わるか?
O
r p Q
L
P D
(α,β,γ) (ξ,η,ζ)
(x,y,z ) 1
Figure 5: 方向による I の変化
p 2 = r 2 − OQ ¯ 2
= (x 2 + y 2 + z 2 ) (α 2 + β 2 + γ 2 )
| {z }
=1
− (αx + βy + γz) 2
= α 2 (y 2 + z 2 ) + β 2 (z 2 + x 2 ) + γ 2 (x 2 + y 2 ) − 2βγyz − 2γαzx − 2αβzy (57) L L = X mp 2
= Aα 2 + Bβ 2 + Cγ 2 − 2Dβγ − 2Eγα − 2F αβ
= M ` 4
OD ¯ 2 , ` : 代表的な長さ (58)
2 慣性能率 11 これを満たす OD ¯ が決まる. D は方向 L によって決まる.この D 点の軌跡は 5 ,
Aξ 2 + Bη 2 + Cζ 2 − 2Dηζ − 2Eζξ − 2F ξη = M ` 4 (59) これは A, B, C > 0 より,楕円面を表す.これを慣性楕円体という.これを主軸変換すれ ば D, E, F = 0 となる.
慣性主軸:(59) を,
ϕ(ξ, η, ζ) = 0 (60)
とかく.主軸と楕円面の交点では,
~r k ~n, ~n = ∂ϕ
∂ξ , ∂ϕ
∂η , ∂ϕ
∂ζ
!
, ~r = (ξ, η, ζ) (61)
よって,
Aξ − Eζ − F η
ξ = Bη − Dζ − F ξ
η = Cζ − Dη − Eξ
ζ (62)
OD ¯ で割って 6 ,
I L = Aα − Eγ − F β
α = Bβ − Dγ − F α
β = Cγ − Dβ − Eα
γ (63)
よって,
A − I L − F − E
− F B − U L − D
− E − D C − I L
α β γ
= 0 (64) Non-trivial より det = 0,
A − I L − F − E
− F B − I L − D
− E − D C − I L
= 0 (65)
これは 3 つの正根をもつ: I 1 , I 2 , I 3
I = I j , (α j , β j , γ j ) とおくと,
α
jγ
j= (A−I D(B−I
j)+DF
j
)(B−I
j)−F
2= a j β
jγ
j= (A−I D(A−I
j)+EF
j
)(B−I
j)−F
2= b j
α j 2 + β j 2 + γ j 2 = 1
α j = ± √ a
ja
2j+b
2j+1
β j = ± √ b
ja
2j+b
2j+1
γ j = ± √ a
21
j+β
j2+1
(66)
5
α · OD = ¯ ξ, β · OD = ¯ η, γ · OD = ¯ ζ
6
( )α + ( )β + ( )γ
α 2 + β 2 + γ 2 = ( )α + ( )β + ( )γ = L L
2 慣性能率 12 このとき,
I j = Aα 2 j + Bβ j 2 + Cγ j 2 − 2Dβ j γ j − 2Eγ j α j − 2F α j β j > 0 (67) x, y, z −→ x 0 , y 0 , z 0 へ変換
x y z x 0 α 1 β 1 γ 1 y 0 α 2 β 2 γ 2
z 0 α 3 β 3 γ 3
A 0 = I 1
B 0 = I 2
C 0 = I 3
D 0 = E 0 = F 0 = 0
(68)
(19) ↔ I L = I 1 α 2 + I 2 β 2 + I 3 γ 2 (69) この,
• x 0 , y 0 , z 0 を慣性主軸という.
• I 1 , I 2 , I 3 を主慣性能率という.
• x 0 y 0 , y 0 z 0 , z 0 x 0 面を主慣性面という.
主軸の長さの半分を a, b, c (主半径)とすると,
I 1 = M ` 4
a 2 , I 2 = M ` 4
b 2 , I 3 = M ` 4
c 2 (70)
a > b > c なら I 1 < I 2 < I 3
O が G に一致するとき中心 (central) と呼ぶ.
2.3 慣性楕円体の性質
2.3.1 A ≤ B ≤ C i.e a ≥ b ≥ c
A + B ≥ C (71)
より,
1 B ≥ 1
C ≥ 1 A + B 1 − A
B ≤ 1 − A
C ≤ 1 − A A + B B − A
B ≤ C − A
C ≤ B
A + B (72)
2 慣性能率 13 よって 7 .
e 2 z ≤ e 2 y ≤ 1
2 − e 2 z (73)
e 2 z given :
e
O e
prolate spheroid oblate spheroid
1/2
1 1
y
z 2
2
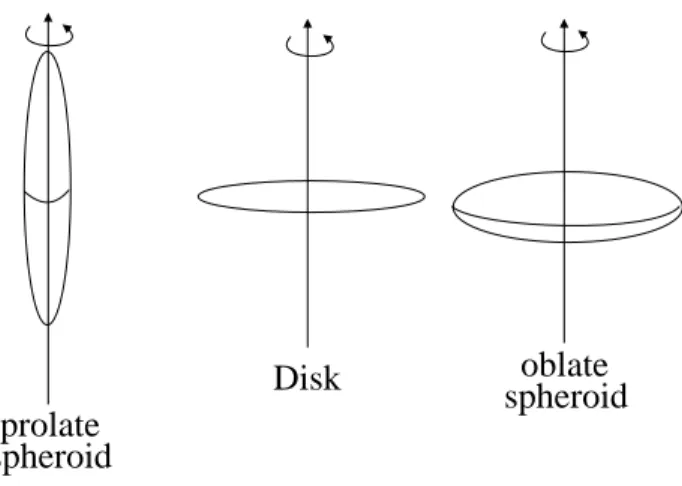
Figure 6: e 2 z − − e 2 y 1. e 2 y min. at B = C :
prolate spheroid ( 回転楕円体:ハマキ型 ) 2. e 2 y max. at A + B = C:
物質分布は Disk (円盤) 3. e z = 0 at A = B :
oblate spheroid (回転楕円体:パンケーキ型) e 2 z max = 1
2 ⇒ A C ≥ 1
2 i.e c a ≥ 1
√ 2 あまり平たくなれない (74) 2.3.2
中心慣性楕円体z 軸が原点 O における慣性主軸である条件は,
D = X myz = 0, E = X mzx = 0 (75)
z 軸が O 0 における慣性主軸でもあるためには,
X my(z − h) = 0, X m(z − h)x = 0 (76) これより,
7
e 2 z = B − A
B
とおく.2 慣性能率 14
Disk prolate
spheroid
oblate spheroid
Figure 7: prolate spheroid, disk, oblate spheroid
O O
h
Figure 8: 中心慣性楕円体
h X my = h X mx = 0 = ⇒ X my = X mx = 0 (77) z 軸は重心を通る.ある軸 ` が軸上の 2 点において各々主軸→ ` は重心を通る.
2.4 中心楕円体の座標軸
平面 π :
uξ + vη + wζ = 1 (78)
2 慣性能率 15
y z
x
π
G
P p
(x,y,z )
Figure 9: 中心慣性楕円体の座標軸 π に関する慣性能率 I π を考える 8 .
I π = X mp 2 = X m (ux + vy + wz − 1) 2 u 2 + v 2 + w 2
= u 2 P mx 2 + v 2 P my 2 + w 2 P mz 2 + M
u 2 + v 2 + w 2 (79)
今, a, b, c を yz 面, zx 面, xy 面(主慣性面)に関する回転半径とする.
X mx 2 = M a 2 , X my 2 = M b 2 , X mz 2 = M c 2 (80) I π = M k 2 とすると,
k 2 = u 2 a 2 + v 2 b 2 + w 2 c 2 + 1
u 2 + v 2 + w 2 (81)
この k を一定とする一群の面の包絡面を考えよう.
u 2 (k 2 − a 1 ) + v 2 (k 2 − b 2 ) + w 2 (k 2 − c 2 ) = 1 (82) この包絡面は
ξ 2
k 2 − a 2 + η 2
k 2 − b 2 + ζ 2
k 2 − c 2 = 1 (83)
となる.これは共焦点 2 次曲面と呼ばれるものである. c 2 ≤ b 2 ≤ a 2 とすると, k の値に よって色々変わる.
1. k 2 > a 2 :楕円面
2. b 2 < k 2 < a 2 :一葉双曲面
3. c 2 < k 2 < b 2 :二葉双曲面
2 慣性能率 16
G G G
Figure 10: 共焦点 2 次曲面
(ξ, η, ζ) を与えて解くと (83) は 3 次方程式となる.k 2 ⇒ 3つの正根がでる:k 2 1 , k 2 2 , k 3 2 . 一般に,
c 2 < k 2 3 < b 2 < k 2 2 < a 2 < k 2 1 (84) この P (ξ, η, ζ) を通る k 1 , k 2 , k 3 に指定される 3 直交曲面の接平面は 3 枚存在する(これ は包絡面を作る前の面と一致する).接平面の方程式は 9 ,
ξ
0k
21−a
2ξ + k
2η
01
−b
2η + k
2ζ
01
−c
2ζ = 1
ξ
0k
22−a
2ξ + k
2η
02
−b
2η + k
2ζ
02
−c
2ζ = 1
ξ
0k
23−a
2ξ + k
2η
03
−b
2η + k
2ζ
03
−c
2ζ = 1
(85)
Binet の定理: P (ξ 0 , η 0 , ζ 0 ) における 3 つの主慣性面は P を通る 3 つの共焦点 2 次曲面に接 し,また P における主慣性面における慣性能率の値は M k 1 2 , M k 2 2 , M k 3 2 に等しい.ξ, η, ζ 軸へ座標変換する.
ξ = ξ 0 + α 1 x + α 2 y + α 3 z (86) η = η 0 + β 1 x + β 2 y + β 3 z (87) ζ = ζ 0 + γ 1 x + γ 2 y + γ 3 z (88) ここで,
α 1 = ρ 1
ξ 0
k 1 1 − a 2 , α 2 = ρ 2
ξ 0
k 1 2 − a 2 , α 3 = ρ 3
ξ 0
k 1 3 − a 2 (89)
8
p = | ax √ + by + cz − 1 |
a 2 + b 2 + 1 , M = X m
9
これは,uξ + vη + wζ = 1
に対応する.2 慣性能率 17
x y z
ξ
ζ
P η (ξ ,η , ζ ) 0 0 0
Figure 11: Binet の定理 β 1 = ρ 1 η 0
k 1 2 − b 2 , β 2 = ρ 2 η 0
k 2 2 − b 2 , β 3 = ρ 3 η 0
k 3 2 − b 2 (90) γ 1 = ρ 1
ζ 0
k 1 2 − c 2 , γ 2 = ρ 2
ζ 0
k 2 2 − c 2 , γ 3 = ρ 3
ζ 0
k 3 2 − c 2 (91) ρ 2 i =
ξ 0 k 1 2 − a 2
! 2
+ η 0 k 2 2 − b 2
! 2
+ ζ 0 k 3 2 − c 2
! 2
+
−1
(92) これを解くと,
x = α 1 ξ + β 1 η + γ 1 ζ − (α 1 ξ 0 + β 1 η 0 + γ 1 ζ 0 )
= α 1 ξ + β 1 η + γ 1 ζ − ρ 1 (93)
k j は (83) を満たすから, α 1 ξ 0 + β 1 η 0 + γ 1 ζ 0 = ρ 1
ξ 0
k 2 1 − a 2 + η 0
k 2 2 − b 2 + ζ 0
k 2 3 − c 2
!
= ρ 1
!
y = α 2 ξ + β 2 η + γ 2 ζ − ρ 2 (94)
z = α 3 ξ + β 3 η + γ 3 ζ − ρ 3 (95)
さて,
X mξ = X mη = X mζ = X mξη = X mηζ = X mζξ = 0 (96) 主慣性面に関する慣性能率は 10 ,
X mx 2 = X m(α 1 ξ + β 1 η + γ 1 ζ − ρ 1 ) 2
= M (α 2 1 a 2 + β 1 2 b 2 + γ 1 2 c 2 + ρ 2 1 )
= M ρ 2 1
aξ 0
k 1 2 − a 2
! 2
+ bη 0
k 1 2 − b 2
! 2
+ cζ 0
k 1 2 − c 2
! 2
+ 1
(97)
10
X mξ 2 = M a 2 , X
mη 2 = M b 2 , X
mζ 2 = M c 2
2 慣性能率 18 いっぽう,
1 = ξ 0 2
k 1 2 − a 2 + η 2 0
k 2 1 − b 2 + ζ 0 2
k 1 2 − c 2 (98)
より,
X mx 2 = M ρ 2 1
"
k 2 1 ξ 0 2
(k 2 1 − a 2 ) 2 + k 1 2 η 2 0
(k 2 1 − b 2 ) 2 + k 2 1 ζ 0 2 (k 1 2 − c 2 ) 2
#
= M ρ 2 1 k 1 2 1
ρ 2 1 = M k 1 2 (99)
同様に,
X my 2 = M k 2 2 (100)
X mz 2 = M k 2 3 (101)
X mxy = X myz = X mzx = 0 (102)
さて, P における慣性楕円体は,
A = X m(y 2 + z 2 ) = M (k 2 2 + M k 2 3 ) (103) 等により,
M (k 2 2 + k 2 3 )x 2 + M (k 2 3 + k 1 2 )y 2 + M(k 2 1 + k 2 2 ) = M ` 4 (104) よって,
(k 2 2 + k 2 3 )x 2 + (k 2 3 + k 1 2 )y 2 + (k 2 1 + k 2 2 ) = ` 4 (105) ここで ` は代表的な長さである.k 1 > k 2 > k 3 より,
• 最長軸は楕円面に垂直
• 最短軸は二葉双極面に垂直
2.5 主点
The principal point of a given line
線 ` がその点 P の慣性主軸であるような ` 上の点 2.5.1
中心楕円体が球• G を通れば ` 上のどこでも主点
• G を通らなければ ` 上に降ろした G からの足 P
2 慣性能率 19
G
l
G
l
P
Figure 12: 中心楕円体が球
P P
G
x y
z
(α,β,γ) l
(x ,y , z ) 0 0 0
Figure 13: 中心楕円体が球でないとき
2.5.2
中心楕円体が球でないとき`:
x = x 0 + αs, y = y 0 + βs, z = z 0 + γs (106) 今,点 P (x, y, z) が主点とする.
a, b, c … 主慣性面に対する回転半径
P が主点だから 3 つの直交曲面のうち, 1 つが ` に直交している.直交曲面の方程式は (83) より,
x 2
k 2 − a 2 + y 2
k 2 − b 2 + z 2
k 2 − c 2 = 1 (107)
` がこれに直交するには α = 1
R
x 0 + αs
k 2 − a 2 , β = 1 R
y 0 + βs
k 2 − b 2 , γ = 1 R
z 0 + γs
k 2 − c 2 (108)
2 慣性能率 20
R 2 =
x 0 + αs k 2 − a 2
2
+ y 0 + βs k 2 − b 2
! 2
+
z 0 + γs k 2 − c 2
2
Normaling Factor (109) でなければならない.
1. ` が重心 G を通る時
(x 0 , y 0 , z 0 ) = (0, 0, 0) と出来るから,
α
1 − 1 R
s k 2 − a 2
= 0, β
1 − 1 R
s k 2 − b 2
= 0, γ
1 − 1 R
s k 2 − c 2
= 0, (110) これが成り立つには ` が,
(1, 0, 0), (0, 1, 0), (0, 0, 1) (111) でなければならない(主慣性軸(座標軸)).
2. ` が重心 G を通らない時 (108) より,
R = x 0 + αs
α(k 2 − a 2 ) = y 0 + βs
β(k 2 − b 2 ) = z 0 + γs
γ(k 2 − c 2 ) (112) s, k を消去すると,
R =
y
0β − x α
0a 2 − b 2 =
z
0γ − y β
0b 2 − c 2 =
x
0α − y β
0c 2 − a 2 (113)
これより,
b 2 − c 2
α x 0 + c 2 − a 2
β y 0 + a 2 − b 2
γ z 0 = 0 (114)
もちろんこれは ` を含む平面の式である.
3. k, s の値
R 2 α 2 (k 2 − a 2 ) + R 2 β 2 (k 2 − b 2 ) + R 2 γ 2 (k 2 − c 2 ) = 1 (115) R 2 k 2 − R 2 (α 2 a 2 + β 2 b 2 + γ 2 c 2 ) = 1 (116) よって,
k 2 = 1
R 2 + (a 2 α 2 + b 2 β 2 + c 2 γ 2 ) (117) したがって,
s = R(k 2 − a 2 ) − x 0
α = R(k 2 − b 2 ) − y 0
β = R(k 2 − c 2 ) − z 0
γ (118)
s = Rk 2 − (a 2 α 2 + b 2 β 2 + c 2 γ 2 ) − (αx 0 + βy 0 + γz 0 )
= 1
R − (αx 0 + βy 0 + γz 0 ) (119)
2 慣性能率 21
2.6 回転の楕円体
Ellipsiod of Joyration
O 点における慣性楕円体を,
Ax 2 + By 2 + Cz 2 = M ` 4 (120)
x 2 A + y 2
B + z 2 C = 1
M (121)
(120) について (121) を回転の楕円体という. (121) の各軸の長さは (120) の回転半径で
ある.(120) と (121) は相反 (reciplocal) であるという.
3 オイラーの運動方程式 22
3 オイラーの運動方程式
3.1 歴史
1749 d’Akembert 剛体の自由回転
1758 Euler オイラーの運動方程式
Jacobi 外力が固定点を通る 1 つの力で Euler の問題が
置き換えられる時を解いた
1815 Lagrange 固定点の慣性楕円体が A = B で軸が重心を通る時
Poisson
1851 Poinsot Euler 問題を幾何学的に解く
1889 Mme Kovaleski A = B = 2C
19– Andoyer Andoyer con. var. の発見
3.2 剛体の変位
3.2.1
固定軸の回りの回転による変位O P
Q P
0
ϕ
a
r r
0
Figure 14: 固定軸の回りの回転
~r = q~r 0 q −1 (122)
q = cos ϕ
2 + ~a sin ϕ
2 (123)
q −1 = cos ϕ
2 − ~a sin ϕ
2 (124)
3 オイラーの運動方程式 23 qq −1 = cos 2 ϕ
2 − ~a 2 sin ϕ
2 (125)
~a~b = ~a · ~b + ~a × ~b = S~a~b + V ~a~b より,
~a~a = S~a~a = −| ~a | 2 = − 1 (126) よって,
qq −1 = 1 (127)
~r 0 q −1 = ~r 0 cos ϕ
2 − ~r 0 ~a sin ϕ
2 (128)
q~r 0 q −1 = ~r 0 cos 2 ϕ
2 − ~a~r 0 ~a sin 2 ϕ
2 + (~a~r 0 − ~r 0 ~a)
| {z }
2 V ~a~r
0sin ϕ 2 cos ϕ
2
= V ~a~r 0 sin ϕ + ~r 0 cos 2 ϕ
2 − ~a~r 0 ~a sin 2 ϕ
2 (129)
変位 ∆~r は,
∆~r 0 = ~r − ~r 0
= V~a~r 0 sin ϕ − (~r 0 + ~a~r 0 ~a) sin 2 ϕ
2 (130)
無限小回転では,
d~r 0 = dϕV~a · ~r 0 + O (dϕ 2 ) (131)
~ r ˙ = d~r dt
~r=~r
0= ˙ ϕV~a · ~r 0 = V( ~a ϕ) ˙ · ~r 0 = V~ω~r 0 (132)
~ω:角速度ベクトル よって,
~ r ˙ 0 = V~ω · ~r 0 (133)
となる 11
3.2.2
剛体の変位(一般的)
平行移動する基準点 O に回転ベクトル ~a,回転角 ϕ は存在しない事を示そう.′
11
これは良く知られた結果,F ~ ∝ ~ ω × ~ r
に導く.3 オイラーの運動方程式 24
P
O O
D
T T r
r ρ
O O
P
1
1 1
0
1
a
Figure 15: 剛体の変位 (一般的) D ~ = T ~ + q~r 0 q −1 − ~r 0 , q = cos ϕ
2 + ~a sin ϕ
2 (134)
別の点 O 1 について行うと,
D ~ 1 = T ~ 1 + a~r 1 q −1 − ~r 1 (135) とおくと,
~r 1 = ~r 0 + ~ ρ (136)
T ~ 1 = T ~ 0 + q( − ~ ρ)q −1 + ~ ρ (137) よって,
D ~ 1 = T ~ + q~r 0 q −1 − ~r 0 = D ~ (138) さらに,次の定理が分かっている.
剛体の任意の変位は適当な screw ( T ~ k ~a) で表される.
いま,
D ~ = T ~ + q~rq −1 − ~r, q = cos ϕ
2 + ~a sin ϕ
2 (139)
O を ρ だけずらすと,
T ~ 1 = T ~ + q~ ρq −1 − ~ ρ (140) V~a ~ T 1 = 0 にするには,
V~a~ ρ = V~aq~ ρq −1 = V~a ~ T (141) であればよい.q は ~a で generate されているから,
q~a = ~aq (142)
3 オイラーの運動方程式 25 Vqpq −1 = Vq(Sp + Vp)q −1 = Vq(Sp)q −1 + Vq(Vp)q −1 = V(Sp)
| {z }
=0
+Vq(Vp)q −1 (143)
さて 12 ,
q~ ρ 1 = (Sq + Vq)~ ρ 1 = ~ ρ 1 Sq + (Vq)~ ρ 1 = ~ ρ 1 (Sq − Vq) = ~ ρ 1 q −1 (144) よって,
(1 − q 2 )~ ρ 1 = T ~ 1 , ρ ~ 1 = (1 − q 2 ) −1 T ~ 1 (145) 別に,
1 − q 2 = 1 − (cos ϕ + ~a sin ϕ) = 2 sin 2 ϕ
2 − ~a sin ϕ = 2 ~a sin ϕ
| {z 2 }
V q
− ~a sin ϕ
2 + cos ϕ 2
| {z }
=q
−1= 2(Vq)q −1
(146) よって,
(1 − q 2 ) −1 = 2(Vq)q −1 −1 = q 1
2 (Vq) −1 = 1
2 (Vq) −1 q (qf (q) = f(q)q) (147)
~
ρ 1 q − q~ ρ 1 = T ~ 1 q (148)
さて,
[p, q] = 2VVpVq ≡ [Vp, Vq] (149)
pq − qp = (Sp + Vp)(Sq + Vq) − (Sq + q)(Sp + Vp)
= SpSq + VpSq + SpVq + VpVq − SqSp − VqSp − SqVp − VqVp
= VpVq − VqVp
= (SVpVq + VVpVq) − (SVqVp + VVqVp)
= 2VVpVq (150)
ここで,
SpSq = SqSp, VpSq = SqVp, Sab = Sba, Vab = − Vba (151)
を用いた.
3 オイラーの運動方程式 26
O r
a a
ϕ ϕ
2
2
1
1
0
Figure 16: 固定点の回りの回転
3.3 固定点の回りの運動
3.3.1
角速度~a 1 の 回りに ϕ 1 回転した後,~a 2 の回りに ϕ 2 回転しよう.
~r 1 = q 1 ~r 0 q −1 1 , ~r 2 = q 2 ~r 1 q 1 −1 , q j = cos ϕ j
2 + ~a j sin ϕ j
2 (152)
よって,
~r 2 = q 2 q 1 ~r 0 q 1 −1 q −1 2 (153) q 2 q 1 = q とおくと,q −1 1 q 2 −1 = (q 2 q 1 ) −1=q
−1よって,
~r 2 = q~r 0 q −1 (154)
q =
cos ϕ 2
2 + ~a 2 sin ϕ 2
2 cos ϕ 1
2 + ~a 1 sin ϕ 1
2
= cos ϕ 2
2 cos ϕ 1
2 + ~a 2 sin ϕ 2
2 cos ϕ 1
2 + ~a 1 sin ϕ 1
2 cos ϕ 2
2 + sin ϕ 2
2 sin ϕ 1
2 ~a 2 ~a 1
=
cos ϕ 2
2 cos ϕ 1
2 + (S~a 2 ~a 1 ) sin ϕ 2 2 sin ϕ 1
2
+ sin ϕ 2
2 cos ϕ 1
2 ~a 2 + sin ϕ 1
2 cos ϕ 2 2 ~a 1
+ sin ϕ 2
2 sin ϕ 1
2 V~a 2 ~a 1 (155)
さて,q 1 q 2 = q 0 とおくと,q 1 q 2 6 = q 2 q 1 (等号は ~a 2 = ~a 1 の時だけ).つまり,
有限回転は順序に依存する.
無限小回転
~r 1 = q 1 ~r 0 q 1 −1
q 1 = 1 + ϕ 1
2 ~a 1 + O (ϕ 2 1 )
12 ~ ρ 1 ⊥ Vq( k ~a)
より(Vq)ρ 1 = − ρ 1 (Vq)
3 オイラーの運動方程式 27
=
1 + ϕ 1
2 ~a 1
~r 0
1 − ϕ 1
2 ~a 1
= ~r 0 + ϕ 1
2 ( ~a 1 ~r 0 − ~r 0 ~a 1 ) + O (ϕ 2 1 ) (pq − pq = 2VVpVq)
~r 0 + ϕ 1 V~a 1 ~r 0 + O (ϕ 2 1 ) (156) よって,
~r 2 = ~r 1 + V~a 2 ~r 1 + O (ϕ 2 2 )
= ~r 0 + ϕ 1 V~a 1 ~r 0 ∗ ϕ 2 V ~a 2 ~r 0 + O (二次) (157) 無限小回転は順序によらない.
無限小回転において,
dϕ j ~a j = ~ω j dt, d(~r 2 − ~r 0 ) = ~ r ˙ 0 dt (158) とおくと,
~ r ˙ 0 = V~ω 1 ~r 0 + V~ω 2 ~r 0 = V~ω~r 0 , ~ω = ~ω 1 + ~ω 2 (159) このように,角速度 ~ω はベクトルであり,合成できる ( 無限小回転 ) .
3.3.2
角運動量と運動エネルギーG ~ = X mV~r~ r ˙ = X mV~rV~ω~r ; 角運動量 (160) ここで,
Vα(Vβγ) = Vα(βγ − Sβγ ) = Vαβγ = αSβγ − βSγα, Sγα = − γ · α (161) より,
G ~ = X m h ~rS~ω~r + ~ωr 2 i (162) O を原点とする剛体に固定された軸 i, j, k をとる.
~ω = ω 1 i + ω 2 j + ω 3 k (163)
~r = ξi + ηj + ζk (164)
すると,
S~ω~r = − ω 1 ξ − ω 2 η − ω 3 ζ (165)
3 オイラーの運動方程式 28
O i
j
k
Figure 17: i, j, k よって,
G ~ = hX mr 2 ω 2 − X mξ(ω 1 ξ + ω 2 η + ω 3 ζ) i i + hX mr 2 ω 2 − X mη(ω 1 ξ + ω 2 η + ω 3 ζ ) i j
+ hX mr 2 ω 3 − X mζ(ω 1 ξ + ω 2 η + ω 3 ζ) i k (166) r 2 = ξ 2 + η 2 + ζ 2 より,
G j = X m(δ kl − δ jl )r k r l (167) 慣性積をつかって,
G ~ = (Aω 1 − F ω 2 − Eω 3 )i +(Bω 2 − Dω 3 − F ω 1 )j
+(Cω 3 − Eω 1 − Dω 2 )k (168)
同じ様に運動エネルギーについて 13 , T = − 1
2
X mS ~ r~ ˙ r ˙ = − 1 2
X mS ~ rV~ω~r ˙ = − 1 2
X mS~ω~r~ r ˙
= − 1
2 S(~ω X m~r~ r) = ˙ − 1
2 S(~ω X mV~r~ r) = ˙ − 1
2 S~ω ~ G (169)
= 1
2 (Aω 1 2 + Bω 2 2 + Cω 3 2 ) − (Dω 2 ω 3 + Eω 3 ω 1 + F ω 1 ω 2 ) (170) 一方 ~ r ˙ = V~ω~r を同時に代入して,
2T = − X mSV~ω~rV~ω~r (171)
SV~ω~rV~ω~r = S~ω~rV~ ω~r = − S~ω~rV~r~ω
= − S~ω~r(~r~ω − S~r~ω) = − ~r 2 ~ω 2 + (S~ ω~r) 2 (172)
13 S~a~b = − ~a · ~b
3 オイラーの運動方程式 29 よって,
2T = X m[ω 2 r 2 − (S~ ω~r) 2 ] = X mω 2 [r 2 − (S~rU~ω) 2 ] = ω 2 X mω 2 p 2 = ω 2 I ω (173) ここで I ω は ω ~ 方向の慣性モーメント.
I ω = Aω 1 2 + Bω 2 2 + Cω 2 3 − 2(Dω 2 ω 3 + Eω 3 ω 2 + F ω 1 ω 2 ) (174)
O
r p
S r U ω
2
ω
Figure 18: S~rU~ω, p 2 , ~r
3.3.3 i, j, k
を慣性主軸にとるG ~ = Aω 1 i + Bω 2 j + Cω 3 (175)
i, j, k も剛体と共に動くから 14 ,
~ ˙
G = A ω ˙ 1 i + B ω ˙ 2 j + C ω ˙ 3 k
| {z }
∂G
∂t
+ Aω 1 V~ωi + Bω 2 V~ω + Cω 3 V~ωk
| {z }
V ω ~ ~ G
(176) よって,
~ ˙
G = ∂G
∂t + V~ω ~ G (177)
V~ω ~ G; 遠心偶力 (centrifugal couple) V~ωi = − ω 2 k + ω 3 j などにより,
~ ˙
G = [A ω ˙ 1 + (C − B)ω 2 ω 3 ] i + [B ω ˙ 2 + (A − C)ω 3 ω 1 ] j
+ [C ω ˙ 3 + (B − A)ω 1 ω 2 ] k (178)
14 ~ r ˙ = V~ ω~ r
3 オイラーの運動方程式 30 遠心力 (Centrifugal Couple) について
遠心力:
f ~ = mp 2 ω 2 U f , ~ U f ~ = V~aV~a −1 ~r = − V~aV~a~r (179) よって 15 ,
f ~ = − mω 2 V~aV~a~r = mV~ωV~ω~r = m~ωS~ω~r + mω 2 ~r (180)
V~r ~ f = mS~r~ ωV~ω~r (181)
一方,
~ ˙
G = X mV~rV~ω ~ R = X m~ωr 2 + m~rS~ω~r (182) V~ω ~ G = X mV~ω~rS~ω~r = − X V~r ~ f (183)
よって V~ω ~ G
は遠心力に依存するterm
である.これは回転軸の移動による結果である.Euler の運動方程式
m f r
a =ω
Figure 19: 遠心力
~ ˙
G = N ~ の表式
A ω ˙ 1 + (C − B)ω 2 ω 3 = N 1
B ω ˙ 2 + (A − C)ω 3 ω 1 = N 2 C ω ˙ 3 + (B − A)ω 1 ω 2 = N 3
(184)
これは一般には解けない.天体力学では重心を O にとって N ~ = gradΦ , A ∼ B ∼ C 等 の条件などによりいろいろと解ける.
これは 3 階の方程式である.実は 6 階の方程式でないと運動は解けない.後の 3 階は ψ, ˙ ϕ, ˙ vθ ˙ と ~ω の関係である.さて,
15 ~ ω = ω ω ˆ = ω~a
3 オイラーの運動方程式 31
N i A C Z
X
θ
ψ O ϕ θ
M
Figure 20: 慣性楕円体の赤道面と基準面
~ω = ω 1 i + ω 2 j + ω 3 k (185)
一方,
~ω = ˙ ψOZ + ˙ θON + ˙ ϕOC (186) ここで,
i = (OC)
π2ϕ ON = (cos ϕ + OC sin ϕ)ON = cos ϕ · ON + sin ϕ · OM (187) j = ki = OC · i = cos ϕ · OM − sin ϕ · ON (188)
k = OC (189)
OZ = (ON)
π2(−ϕ) OC = cos θ · OC + sin θOM (190) 代入すると,
~ω = ω 1 (cos ϕ · ON + sin ϕ · OM) + ω 2 (cos ϕ · OM − sin ϕ · ON) + ω 3 OC
= ψ(cos ˙ θ · OC + sin θOM) + ˙ θ · ON + ˙ ϕ · OC (191) 比較して,
ON; θ ˙ = ω 1 cos ϕ − ω 2 sin ϕ OM; sin θ ψ ˙ = ω 1 sin ϕ + ω 2 cos ϕ OC; ϕ ˙ + ˙ ψ cos θ = ω 3
ψ ˙ = − (ω 1 sin ϕ + ω 2 cos ϕ)cetθ + ω 3
(192)
一般には (184) を解いて ~ω を求め, (192) を用いて (ψ, θ, ϕ) を求めるわけであるが,こ
れは結構複雑になる.
3 オイラーの運動方程式 32
O
G
i
j k
Figure 21: 剛体に固定した座標系 3.3.4 N ~ = M V~r G ~g
の場合O r
Mg G
G
Figure 22: N ~ = M V~r G ~g O で支持された一様重力下のコマ.
~ ˙
G = M V~r G ~g (193)
まず 16 ,
S~ ω ~ G ˙ = MS~ωV~r G ~g = M S~ω~r G ~g = MS ((V~ω~r G ) ~g) = M S( ~ r ˙ G ~g) = d
dt (M S~r G ~g)(194) 一方,
S~ω ~ G ˙ = − [Aω 1 ω ˙ 1 + Bω 2 ω ˙ 2 + Cω 3 ω ˙ 3 ]
= − d dt
1 2
Aω 1 2 + Bω 2 2 + Cω 3 2 = − T ˙ (195)
16 ~ r ˙ = V~ ω~ r, d~ dt g = 0
3 オイラーの運動方程式 33 [ 注意 ]
T = − 1
2 S~ω ~ G, T ˙ = − 1 2
S ~ ω ~ ˙ G + ~ω~ G ˙
= − S~ω ~ G ˙ (196) したがって,
S ~ ω ~ ˙ G = S~ω~ G ˙ (197)
よって,
1 2
Aω 1 2 + Bω 2 2 + Cω 3 2
| {z }
運動エネルギー
+M S~r G ~g
| {z }
hg: 位置エネルギー
= const. (198)
これはエネルギー積分.さて, (193) で鉛直上向きを k 0 とすると,
O r
G
G
h g
Figure 23: 位置エネルギー
S Gk ~ ˙ 0 = M S(V~r G ~g)k 0 = M S~r G V(~gk 0 ) = 0 (~g k k 0 ) (199) よって,
S Gk ~ 0 = const. ⇒ 角運動量の z 成分 (200)
慣性主軸に対する k 0 の方向余弦を γ 1 , γ 2 , γ 3 とすれば,
Aω 1 γ 1 + Bω 2 γ 2 + Cω 3 γ 3 = const. (201) 知られている積分はこの 2 つだけである.さまざまな場合
Euler
の場合O が G と一致
Lagrange
の場合中心楕円体が軸対称,O が対称軸上にある.A = B 6 = C
Kovalevski
の場合中心楕円体が軸対称, O は赤道面内, A = B = 2C
3 オイラーの運動方程式 34
O
G k 0
Figure 24: k 0
3.3.5
支持点O
に働く束縛力O を支えるのに必要な力は?
M~ r ¨ G = M ~ G + R, ~ R ~ : O に働く束縛力 (202) この束縛力は剛体のどの点に対しても同じ力が働く.さて 17 ,
~ r ˙ G = V~ω~r G , ~ r ¨ G = V ~ ω~r ˙ G + V~ω(V~ω~r G ) (203)
~ ˙
ω = ˙ ω 1 i + ˙ ω 2 j + ˙ ω 3 + ω 1 V~ ωi + ω 2 V~ωj + ω 3 V~ωk
| {z }
=0
, ˙ i = V~ω~i (204) V~ωi = ω 2 k − ω 3 j などにより,結局,
~ ˙ ω = X
i,j,k
B − C
A ω 2 ω 3 + N 1
A
i (205)
一方,
~r G ξi ¯ + ¯ ηj + ¯ ζk (206)
と書くと,
V ~ ω~r ˙ G = X
i,j,k
C − A
B ω 3 ω 1 + N 2
B
ζ ¯ −
A − B
C ω 1 ω 2 + N 3
C
¯ η
i (207)
さて,
V~ωV~ω~r G = ω 2 ~r G ~ωS~ω~r G
= X h ω 1 (ω 2 ξ ¯ + ω 2 η ¯ + ω 3 ζ) ¯ − ξ(ω ¯ 1 2 + ω 2 2 + ω 3 2 ) i i
= X h ω 1 (ω 2 η ¯ + ω 3 ζ) ¯ − ξ(ω ¯ 2 2 + ω 3 2 ) i i (208)
17 ~ r ˙ G
は剛体に固定されていないから,~a= V~ ω~a
とはいかない.3 オイラーの運動方程式 35 結局,
R ~ = − M~g + M X
C − A
B ω 3 ζ ¯ − A − B C ω 2 η ¯
ω 1
+ ω 1 (ω 2 η ¯ + ω 3 ζ) ¯ − ξ(ω ¯ 2 2 + ω 3 2 ) i i + M X
N 2
B ζ ¯ − N 3
C ηi ¯
(209) N 1 = − M S(V~r G ~g)i = M g(γ 2 ζ ¯ − γ 3 η) ¯ (210) N 2 = − M S(V~r G ~g)j = M g(γ 3 ξ ¯ − γ 1 ζ) ¯ (211) N 3 = − M S(V~r G ~g)k = M g(γ 1 η ¯ − γ 2 ξ) ¯ (212) 重心以外の点が支持点になるとよけいな力がいる.
N ~ = 0 の場合
~ ˙
G = 0 ⇒ G ~ = const.
T ˙ = S~ω ~ G ˙ = 0 ⇒ T = const. (213) そこで,
Aω 1 i + Bω 2 j + Cω 3 k = const. ⇒ A 2 ω 2 + B 2 ω 2 2 + C 2 ω 2 3 = G 2 Aω 2 1 + Bω 2 2 + Cω 3 2 = 2h
(214)
ω 2 で表そう.
G 2 − 2Ah = B(B − A)ω 2 2 + C(C − A)ω 3 2 (215) よって,
ω 3 = ±
s 1
C(C − A) [G 2 − 2Ah − B(B − A)ω 2 2 ] (216) ω 1 = ±
s 1
A(A − C) [G 2 − 2Ch − B(B − C)ω 2 2 ] (217) N ~ = 0 より,
B ω ˙ 2 + (A − C)ω 1 ω 3 = 0 (218)
代入すると,
˙ ω 2 = ±
v u u t − 1
AC
"
G 2 − 2Ah
B − (B − A)ω 2 2
# "
G 2 − 2Ch
B − (B − C)ω 2 2
#
(219)
dt = ±
Z dω 2
r
− AC 1
h G
2−2Ah
B − (B − A)ω 2 2 i h G
2−2Ch B − (B − C)ω 2 2 i
(220)
3 オイラーの運動方程式 36 右辺は楕円関数である 18 . A ≤ B ≤ C と仮定しよう.すると,
G 2 − 2Ah > 0 > G 2 − 2Ch, B − A > 0 > B − C (221) よって,
Z dω 2
r
− AC 1 h G
2−2Ah B − (B − A)ω 2 2 i h G
2−2Ch B − (B − C)ω 2 2 i
=
v u
u t − ACB 2
(G 2 − 2Ah)(G 2 − 2Ch)
Z dω 2
q (1 − k 2 A ω 2 2 )(1 − k C 2 ω 2 2 ) (222) k A 2 = B(B − A)
G 2 − 2Ah > 0, k C 2 = B(B − C) G 2 − 2Ch > 0
| ω 2 | ≤ max
1 k A
, 1 k C
(223) k A ω 2 = u とすると,
Z dω 2
(1 − u 2 )(1 − k 2 u 2 ) ∝
Z
dt (224)
これより u = sn(t, k), k = k k
CA