自宅での仮想キャラクタによる能動的情報提供が許容されるタイミングの検討
10
0
0
全文
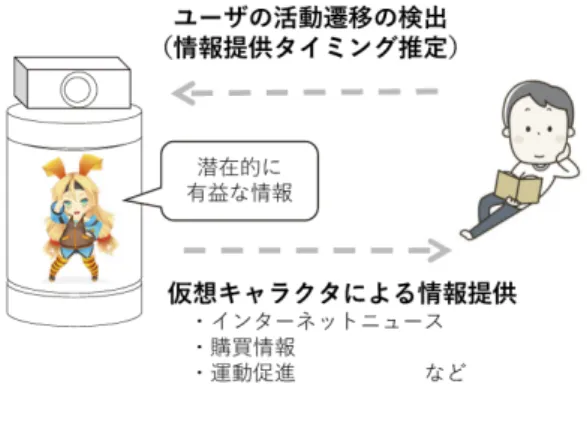
(2) ヒューマンインタフェース学会論文誌 Vol.23, No.2, 2021. されている [18] .同様に,人工物と人のコミュニケー ションにおいても,人工物への身体の付与と非言語情 報の表出が,言語情報を補完しユーザの理解を支援す ることが知られている [19] , [20] .例えば,Andrist らは 人と仮想キャラクタの共同作業において,指示と連動 するキャラクタの視線が作業成績を向上させることを 示した [21] .Ochs らは,仮想キャラクタの表情,特に 笑顔を用いることでキャラクタ自身の態度や感情を表 現できることを示した [22] .Hartmann らは,仮想キャ ラクタがジェスチャによって,キャラクタ自身の感情 図1. 能動的情報提供システムの概念. や状態をユーザに認知させることができることを実証. Fig. 1 Concept of proactive informationdelivery system.. した [23] . すなわち,身体を持ったキャラクタが適切な非言語. おいて情報提供した際にユーザが感じる許容度は不明. 情報を伴って話しかけることによって,理解が容易で. であった.. 受け入れやすい情報提供が可能になるものと期待さ. さらに,能動的な情報提供の受け入れやすさには,. れる. スマートスピーカ・音声アシスタント. 内容やタイミングに加えて,情報を提供する媒体の外. 2. 2. 観や挙動も影響する可能性がある.例えば,スマート. また,スマートスピーカの普及とともに,スマート. スピーカと身体を有するロボットでは,ロボット相手. ホームや障碍者向け環境制御装置のインタフェースと. の方が会話量が多かったとの報告がある [13] .したがっ. して用いる試み [1] , [24] など,様々な利用方法が研究. て,能動的な音声情報提供においても,身体を有する. されている.一方で,Sciuto らは日常生活における. ロボットや仮想キャラクタが介在することが望ましい. スマートスピーカの利用実態を調査し,多くの利用者. と考えられる.. は限られた機能しか利用しなくなる傾向を示した [3] .. そこで本研究では,日常生活場面での自然で受け入. 対して,Vtyuria らは,既存の音声アシスタントには. れやすい能動的情報提供システムの実現に向け,図 1. 一般的にウェイクワードが必要であることに着目し,. のように,ユーザの活動遷移を近似的に検出し,仮想. Woz 法によりウェイクワードを不要としたシステムで あればユーザの満足度が高くなる結果を示した [2] .さ らに,川口らは,利用者とのインタラクションに注視 の入出力を用いたスマートスピーカを開発し,注視の 入出力を用いることでシステムの操作性および対話感 が向上することを示した [25] . 対話の開始に関する研究以外では,ユーザとの会話 における代名詞の使用による親近感の醸成 [26] や,動 作の不確実性によるユーザの利用意欲の促進 [27] など, 人とスマートスピーカの関係をより親密なものにしよ うとする試みも行われている. 以上のように,スマートスピーカの利便性向上や利 用促進に関する様々な研究が行われている一方で,現 状は,受動的な動作に留まっている.そこで,スマー トスピーカからの能動的な話しかけを含む多様なスタ イルの対話を可能にすることによって,さらに用途が 広がるとともにユーザの満足度も向上するものと期待 される.. キャラクタが能動的に話しかけて情報提供するシステ ムを試作した.そうして,若年独居者 5 名の自宅にお いて情報提供タイミングの適切さを実験的に評価した. その結果,移動後は情報提供が許容されやすいことや, 頭部方向の変化は発生頻度が高いがスマートフォンを 注視したまま姿勢変化したときのようなケースの除外 が必要なことが明らかになったので報告する.. 2.. 関連研究. 2. 1 人と人工物のインタラクション ロボットや仮想キャラクタなどの会話型エージェン トがオフィスや日常生活場面に普及するにつれ,人と 人工物のインタラクションに関する研究が増加してい る [1] , [14] .エージェントの外見に関しては,挙動を擬 人化して表現した際の理解の容易さから,人間や動物 に類似した外見を持つことが望ましいと考えられてい る [15] .特に,人間を模した外見のエージェントは,実 世界の人間がとる行動の多くを表出することができる ため,それらを利用した効果的なインタラクションの 方法が数多く研究されている [16] , [17] . 人対人のコミュニケーションでは,アバタを介した 状況においても対面の場合と同様に,非言語情報の表 出が互いの行動や発言意図の理解を容易にすると報告 230 136. ((96 2 )). 2. 3. 在宅ユーザの通知許容度. さらに,家庭内における情報通知タイミングの適切 さ,すなわち在宅ユーザの通知許容度に関する研究も 様々な視点からなされてきた.. Takemae らは宅内全域を対象に,被験者が各部屋 にいる際の通知の望ましさの相違を実験により検証し.
(3) 自宅での仮想キャラクタによる能動的情報提供が許容されるタイミングの検討. た. [28]. .Cumin らは模擬個人宅環境を構築し,被験者. にそこで生活させて,活動種よりも場所が通知許容度 と強く関連することを示した [6] .Vastenburg らは情 報の緊急度に加え,現在の活動への従事度が通知の許 容度に影響することを宅内実験により示した [7] . 一方で,作業の切れ目や遷移時は,作業中と比較 して認知負荷が低下することが知られている [8] .田 中らはこれに着目し,オフィスにおける割り込み拒否 度の推定システムを実現した [9] , [29] .Banerjee らは,. Kinect を用いて作業者の動作の切れ目を検出するこ とで,ロボットによる割り込みタイミングを制御し た [30] .Okoshi らは加速度センサ等で検出した活動遷 移と他の指標を組み合わせてスマートフォンの通知を 制御し,ユーザの応答率が向上することを示した [10] . 以上のように,在宅ユーザの情報提供許容度には, 従事している活動の種類や活動への従事度,さらに活 動遷移の有無が影響するものと推測される. 3.. (a). 能動的情報提供システム. 3. 1 情報提供が許容されるタイミング 2.3 節で述べたように,情報提供が許容されるか否 かは,ユーザが従事している活動の種類や活動の遷移 が影響すると考えられる.ここで,生活環境における 多様な活動種の推定は困難である反面,活動遷移は変 化の検出であるため比較的容易と考えられる.そこで 本研究では活動遷移に着目した. 生活空間において場所は活動と密接に関係するた め,移動は活動遷移の指標になると考えられる.しか し我々の以前の実験において,移動中は情報提供に不 適との傾向が認められたため [12] ,本研究では,移動 して静止したタイミングを検出することとした. さらに,活動の際にはテレビやスマートフォンなど 活動の対象を注視することが多いと考えられるため, 注視対象の変化も活動遷移の指標となるものと期待さ れる.そこで本研究は,システムによって「移動後静 止」と「注視対象変化」を検出し,これらのタイミン グが情報提供に適しているかを実験的に検証する. 3. 2 能動的情報提供システムの概要 実験で使用した能動的情報提供システムは,図 2(a) のように深度センサを用いてユーザの骨格を検出し, 活動遷移が検出されると小型モニタ上の仮想キャラ クタを介して音声でインターネットニュースを提供す る [31] .内部処理は図 2(b) に示す 3 つのモジュールか らなる.以下に各モジュールの機能を述べる. 3. 3 情報提供可否判定モジュール 情報提供可否判定モジュールは,深度センサ (Kinect v2) の body tracking および face tracking 機能を用い て 0.5s 周期で各関節の位置や方向を算出し,活動遷移 と関連すると考えられる移動後の静止や注視対象変化 ((97 3 )). (b). 図2. 試作プロアクティブ情報提供システムの (a) 外観と (b) 構成. Fig. 2 (a) Appearance and (b) configuration of the prototype proactive information-delivery system.. を検出する.. 3. 3. 1 活動遷移関連指標の検出 移動後静止判定のための移動の検出ルールを (1) 式 に示す.フレーム t における水平面内でのユーザの腰 関節座標を Pt とするとき,その過去 10 フレームの平 均座標と,過去 10∼59 フレーム中の連続する 30 フ レームの平均座標との距離の最大値が 0.5m を超えた 時に,移動が発生したものとした.閾値および平均フ レーム数は,研究室内に設置した模擬環境で予備実験 を行って決定した.
(4)
(5)
(6)
(7) 9 29 X
(8) 1 X
(9) 1
(10) max
(11) Pt−k − Pt−j−L
(12)
(13) ≥ 0.5 (1) 30 j=0
(14) 10 k=0
(15) (10 ≤ L ≤ 30, ∆t = 0.5s) 移動後の静止判定は,(2) 式のように現在位置と過 去 9 フレームの平均位置の距離が 0.3m 以下になった 時刻に静止したものとみなした.
(16)
(17) 9
(18)
(19) 1X
(20)
(21) Pt−k
(22) ≤ 0.3
(23) Pt −
(24)
(25) 9. (2). k=1. (∆t = 0.5s) 231 137.
(26) ヒューマンインタフェース学会論文誌 Vol.23, No.2, 2021. 注視対象変化は,居室の広い範囲に適用可能なよう に,Kinect で検出した顔方向角度の変化で代替した.. (3) 式のように,時刻 t におけるユーザの顔方向の左 右軸(前額面内水平軸)周りの角度を θxt ,鉛直軸周 りの角度を θyt とする.このとき,左右か鉛直のいず れかで,現在から過去 6 フレームの平均角度と,過去 6∼16 フレーム中の連続する 6 フレームの平均角度の 差が 20 度を超えた時に,注視対象が変化したものと 判定した.
(27)
(28)
(29) 5
(30) 5 X
(31) 1 X
(32) 1
(33) max
(34) θxt−k − θxt−j−L
(35)
(36) , 6 j=0
(37) 6 k=0
(38)
(39)
(40)
(41) X
(42) 5
(43) 1 5
(44) 1X
(45) θyt−k − θyt−j−L
(46)
(47) ≥ 20
(48) 6 6 j=0
(49)
(50). (a). 図3. (c). 仮想キャラクタのアニメーション.(a) 居 眠り,(b) 話しかけ待機,(c) 話しかけ(情 報提供). Fig. 3 Animation of the virtual character. (a)catnap, (b)waiting for delivery, (c)information delivery.. (3). k=0. (b). で,Unity のアニメーション機能を用いて,頭身の低. (6 ≤ L ≤ 16, ∆t = 0.5s). い女性キャラクタが以下の 3 段階で情報提供を行うシ. ただし,6 フレーム中 2 回以上顔検出に失敗した場. 活動遷移指標の値が小さく,ユーザが活動に集中し. 合と,眼間距離が不自然な場合(55mm 未満または. ていると考えられる場合は,背を向けて居眠りするア. 80mm より大きい)は計算対象外とした. 3. 3. 2 付加的な情報提供可否判定ルール 日常生活場面では,時に移動途中で立ち止まること があり,その様なタイミングは移動後の静止であって も情報提供には不適と考えられる.そこで本研究では, 座って作業や余暇的行動を取る主たる場所を常駐場所 と定義し,あらかじめ実験参加者に聴取し設定した常 駐場所に移動して静止した場合のみを,移動後静止と 判定した. また,主婦を対象とした質問紙調査 [12] から,会話 中の情報提供は許容されない可能性が高いと考えられ る.そこで,実験開始前に各参加者の自宅で Kinect を用いて背景雑音を計測し,その音圧の 3 倍を超えた サンプルの割合が,過去 30s で 20 %を超えた場合は 会話中とみなし,情報提供を回避した. さらに,過度に短い時間間隔での情報提供はユーザ の日常生活を阻害する可能性に加え,実験では主観評 価値に影響する可能性が懸念される.そこで,前回の 情報提供から 6 分間は,活動遷移が検出されても情報 提供を行わないように設定した.また,移動後と注視 対象変化での情報提供回数がある程度均衡するように, 取得データ数の比に応じて情報提供確率が増減するア ルゴリズムを組み込んだ.さらに,比較対象とするた めに,2 つの活動遷移指標が検出されていない,非遷 移状態での情報提供も行った. 3. 4 情報提供モジュール システムによる自然な話しかけを実現するとともに, ユーザがシステムの状態を認知可能とするためには, 身体を保持する仮想キャラクタを用いて適切な非言語 情報を表出することが有効と考えられる [1] , [18] .そこ. ニメーションによって話しかける可能性が低いことを. 232 138. ((98 4 )). ステムを実装した.. 表出した(図 3(a)).活動遷移指標の値が増加した時 は,視線交差しない程度にユーザの方を向かせること で,話しかける可能性を自然に認知できるようにした (図 3(b)). そうして,実際に情報提供する場面では,立ち上 がって微笑むアニメーションを伴って音声で話しかけ, ニュースの見出し文を読み上げた(図 3(c)).. 3. 5 情報選択モジュール 本研究では,情報提供システムの応用場面として, 緊急性は高くないがユーザが興味を持つ可能性のある 情報の提供を想定する.そこで,あらかじめ実験対象 者に聞き取り調査を行い,興味のあるカテゴリのイン ターネットニュースを提供対象とした. 提供するニュースは,キュレーションサイトの一つ である「グノシー」[32] の 40 のニュースカテゴリから, ユーザが興味ありと回答した 10 カテゴリをスクレイ ピングにより取得し,カテゴリに対するユーザの興味 順位に,カテゴリ内でのアクセス順位と配信からの経 過時間を加味して決定した [31] . 4.. 若年独居者の自宅における情報提供実験. 4. 1 実験方法 4. 1. 1 実験概要 東京農工大学倫理委員会の承認を得た後に,実験参 加者の自宅においてシステムによる情報提供を間欠的 に行い,主観評価と深度画像および RGB 画像を自動 記録した.仮想キャラクタは実験参加者の視野に入る 位置に設置した小型モニタに表示し,情報提供は PC に接続したスピーカを通して行った..
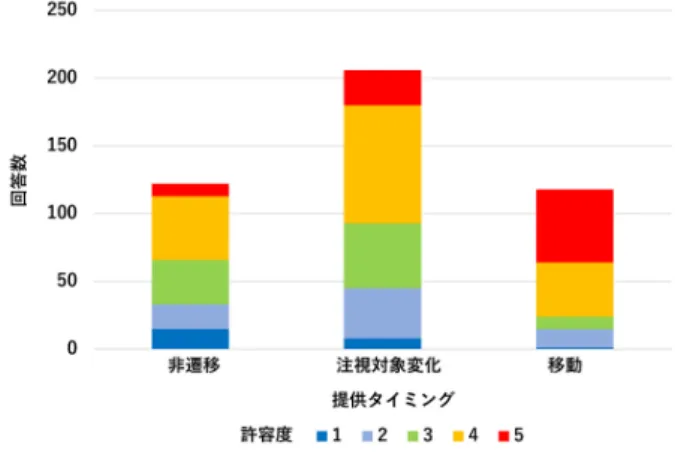
(51) 自宅での仮想キャラクタによる能動的情報提供が許容されるタイミングの検討. 図 4 実験参加者 A の実験環境 Fig. 4 Experimental environment of participant A.. 図 5 提供タイミングと主観的許容度の関係 Fig. 5 Relation between delivery timing and subjective acceptability.. ここで,ユーザの心理的な情報提供の受け入れやす さは,提供タイミングの受け入れやすさと提供された 内容の受け入れやすさによって構成されると考えられ. 表1. 実験時に情報提供した回数とシステムが検 出した潜在的提供機会. Table 1 Numbers of times of actual and potential information delivery.. る.そこで本研究では,内容の影響を排除してタイミ ングの受け入れやすさを評価するために, 「タイミング はどうだった?」に加えて,内容の受け入れやすさを 問う「ニュースに興味はある?」と総合的な許容度を 問う「話しかけは受け入れられる?」の三つの質問を. 移動後. 注視対象変化. 実験時に 情報提供した回数. 118. 206. システムが検出した 潜在的情報提供機会. 234. 2081. 合成音声 [33] によって順に行い,タイミングに対する 回答を主たる分析対象とした.回答は,各質問に対し. ∼2m の位置に設置した.ユーザと深度センサの距離. て 1∼5(邪魔∼適切/興味なし∼興味あり/無視す. は 1.5∼2.5m であった.例として図 4 に実験参加者 1. る∼受け入れる)の 5 段階で音声回答させ,回答して. 名の実験環境を示す.. いる間のみ録音した.. 4. 2 実験結果(概要) 実験の結果,5 名で計 151 時間のデータが得られ, 情報提供回数は計 446 回であった.全実験参加者の 提供タイミングの許容度と提供内容の許容度,ならび に総合的な許容度はすべて 1∼5 に広く分布していた. 相関係数は,タイミングと内容が 0.186,タイミング と総合許容度が 0.618,内容と総合許容度が 0.445 で あった.すなわち,今回の実験では,実験参加者がタ イミングと内容の許容度を混同すること無く評価でき ていたこと,さらに,タイミングと内容の両者が総合 的な許容度に影響する可能性が示唆された.そこで, 以降では,本研究の主たる対象である提供タイミング の許容度について論じる. 図 5 に情報提供タイミングと許容度の関係を示す. また,実験時に情報提供した回数を表 1 に示す.ここ で,3.3.2 で述べたように,本研究では,実験参加者に 不快感を与えないために,実際に情報提供したのは, 検出された移動後静止や注視対象変化の一部のみであ る.そこで,3.3.1 で述べた条件を満たしたとシステ ムが判定した時刻を潜在的な情報提供機会とみなし, その全回数(フレーム数)を計数した.ただし,短時 間に繰り返し検出される場合があるため,検出後 30s 以内に再検出された場合は計数しなかった.なお,表. 4. 1. 2. 実験条件. 実験参加者は,深度センサで計測可能な広さ 7∼8 畳程度の一室内での活動時間が長く,生活パターンが ある程度限定される 21∼24 歳の若年男性独居者とし た.実験では,東京農工大学の学生 6 名を対象にアン ケートを行い,能動的な情報提供に抵抗感を抱かない. 5 名に協力を依頼した.実験参加者には,実験の目的 が能動的情報提供に適したタイミングの検討であるこ とを伝えた上で,通常の日常生活を行いながら任意の 時間に自らシステムを操作して実験を開始するように, また,1 日あたり 5 時間程度を目安に週末を含め合計 30 時間以上記録するよう指示した.ただし,プライバ シ懸念がある場合には,当該時間のデータを確認し削 除して良い旨を伝えた. システムに関しては,参加者がカメラの画角内にい ると,事前に興味があると回答したジャンルのニュース が不定期に提供されるとだけ説明し,具体的な情報提 供タイミングについての明示的な説明は与えなかった. 実験は,実験参加者の全身が記録できるように,で きるだけ遮蔽物の無い位置に深度センサを設置した. 仮想キャラクタを表示するモニタは,ユーザの視界に 入りやすいよう,ユーザが主に活動する場所の前方 1 ((99 5 )). 233 139.
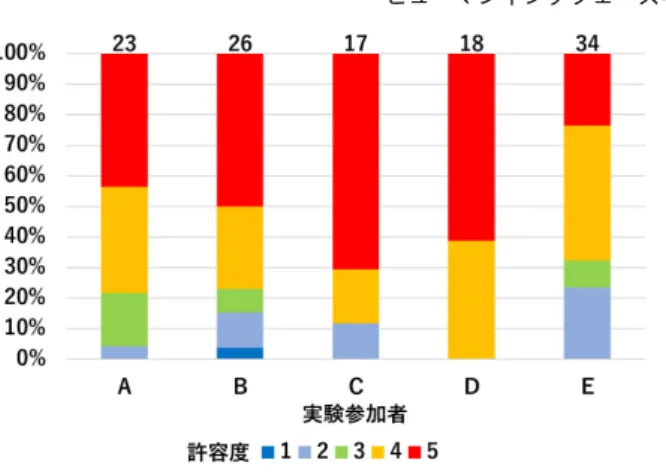
(52) ヒューマンインタフェース学会論文誌 Vol.23, No.2, 2021. 図6. 図 7 注視対象変化時の情報提供許容度の分布(図 上部の数値はそれぞれのデータ数). 移動後の情報提供許容度の分布(図上部の 数値はそれぞれのデータ数). Fig. 7 Distribution of subjective acceptability for information delivery at the moment after gaze-target transition.. Fig. 6 Distribution of subjective acceptability for information delivery at the moment after transfer.. 中の潜在的情報提供機会の回数は,実際に情報提供し. かわらず許容度が低いケースは参加者 C,E で観察さ. た回数を含む値である.. れ,一時的に離席した後に戻ってきて,移動前に行っ. 図 5 を見ると,比較のために行った非遷移時の情報. ていた活動を再開したと見られる場合が多かった.こ. 提供は全 122 回であり,その許容度は 1 から 5 まで. れらに関しては,5.2 節で検討する.. 大きくばらついていた.これに対して,システムが移. 4. 4 注視対象変化時 注視対象変化とシステムが判定したタイミングに対 する情報提供許容度の分布を図 7 に示す. 許容度 4,5 の割合は 30.8%から 73.8%とばらついて おり,特に参加者 B では許容度 1,2 が 14 回含まれて いた.記録画像を確認したところ,この中には,顔検 出の失敗等に起因する誤判定が含まれていたため,5.3 節で改めて考察する. また,移動後の許容度と合わせて見ると,参加者 B の移動後の高許容度の割合は他の参加者と同程度の 76.9%であるのに対して,注視対象変化時の高許容度 の割合は 30.8%と低い.この傾向は,上記の誤判定の 影響を考慮しても変わらなかった.他方,参加者 E は 移動後が 67.6%で注視対象変化時が 73.8%と,大きな 違いは認められない.すなわち,情報提供に対する全 般的な許容度に加えて,嗜好する提供タイミングにも 個人差がある可能性が推測される.. 動後と判定した時は,全 118 回のうち許容度 4 または. 5 が 94 回を占めた.そこで,非遷移/移動後/注視 対象変化の 3 条件に対して自由度 2 の Kruskal-Wallis 検定を実施したところ有意差 (p < 0.001) が認められ たため,各条件間の Steel-Dwass 検定を実施したとこ ろ,移動後は非遷移時および注視対象変化の 2 条件に 対して有意に高許容度が多く (t = 6.79, p < 0.001),. (t = 6.09, p < 0.001),移動後の情報提供は許容され るという予想をおおむね支持する結果となった. 注視対象変化は,全 206 回の情報提供のうち許容 度 4,5 が 113 回であり,122 回中 56 回の非遷移時よ り割合が高かったものの,その差は有意ではなかった (t = 2.02, p = 0.108).しかし,表 1 に見られるよう に,潜在的提供機会数は 2081 と実際に情報提供した 回数の約 10 倍あるため,情報提供に適したタイミン グも多数含まれると考えられる.次節以降では,移動 後および注視対象変化時について詳細に分析する. 4. 3 移動後判定時 システムが移動後と判定した時の主観的情報提供許 容度を,実験参加者ごとに示したものが図 6 である. 許容度 4,5 の割合は,67.6%(参加者 E)から 100% (参加者 D)とばらつきがあるが,いずれの参加者も 移動後の情報提供を許容する傾向が高いことが確認さ れた. 他方,許容度 1,2 と評価されたケースもあったため, それらの情報提供の前後の行動を記録画像で確認した ところ,参加者 B は姿勢変化を移動と誤判定したケー スが数例含まれていた.また,実際に移動したにもか 234 140. ( (100 6 )). 5.. 考察. 5. 1 情報提供が許容されるタイミングとその回数 実験参加者宅での実験の結果,移動後は許容される 割合が有意に高く,活動遷移時の提供は許容されると の仮説が支持された.他方,注視対象変化は許容され る場合とされない場合が混在する結果となったが,潜 在的提供機会数は 2081 と移動後の 234 よりも多かっ た.実際に情報提供した場合と同様に,その 10%程度 が許容されると仮定すると,移動後と同程度の約 200 回の提供機会が得られる計算になる.そこで,5.2,5.3 節では,より厳格な判定によって高許容度の割合を高.
(53) 自宅での仮想キャラクタによる能動的情報提供が許容されるタイミングの検討. 表2. 移動時において移動量が 0.7m 以下の場合 を除外した結果. 左右に変動する例が確認された. そこで,このような誤検出に加えて,食事などで複. Table 2 Effect of exclusion of the cases lessthan-0.7m transfer. 除外前 除外後 誤判定数 9 1 許容度 1,2 の割合 12.7% 10.2% 情報提供回数 118 98. 数の対象を交互に見る場合も併せて除外すべく,顔回 転角の 8 秒間積分値が 180 度を超える場合を除外した 結果が表 3 である.誤検出等の検出数が減少した結果, 許容度 1,2 の割合も低下した.一方で,情報提供回数 も減少した.しかし,既に述べたように潜在的な提供 回数は 2081 回あるため,実際の情報提供回数と同程. める可能性を検討する.. 度の割合で減少したとしても,十分な数の提供機会が. また,4.4 で述べたように,嗜好する提供タイミング には個人差が存在する可能性がある.当然ながら,提. 得られるものと期待される. 他方,上記の手法は誤検出の多くを除外したが,参. 供する情報の内容にも個人ごとの好みがある.さらに,. 加者 A,B では許容度 1,2 がまだ 30%以上含まれる.そ. 実験後の聞き取り調査において,参加者 A は「キャラ. の中には,本研究では深度カメラによって自動検出さ. クタを使用するのが楽しくて受け入れやすさが上昇し. れた顔方向を用いて注視対象変化を近似的に検出した. た」と回答していた.したがって,自宅環境での能動. ため,スマートフォンを持ったまま姿勢を変えた場合. 的情報提供に際しては,タイミングや情報の内容,さ. のように実際には注視対象は変化していない場合が含. らに提供媒体の外観や挙動などに対するユーザの嗜好. まれる.画像を確認したところ,除外後に残った許容. を適切に反映するための仕組みが望まれる.. 度 1,2 の 13 回中 8 回がスマートフォン利用中であっ. 5. 2. 移動後判定時の低許容度の除外可能性. た.この問題に対しては,例えば,スマートフォンを. 結果で述べたように,移動後は高許容度が多かった. 情報提供システムと連携させて,スマートフォン利用. が,許容度 1,2 と評価されたケースも 12.7%あり,そ. 中は情報提供を避けるなどの対応が考えられ,今後の. の一部は,姿勢変化を移動と誤判定したものであった.. 検討課題である.. そこで当該データを確認したところ,実際に移動した 場合よりも移動量が小さいことが判明したため,移動. 5. 4. 本研究の限界と能動的情報提供エージェント の実現に向けた課題. 判定の閾値を 0.5m から 0.7m に変更して再計算した. 本研究では,若年独居男性の大学生を対象に評価実. 結果が表 2 である.誤判定数が 9 から 1 に減少し,そ. 験を実施した.時間制約が厳しい会社員や家族と同居. れに伴って許容度 1,2 の割合も減少した.ただし,正. する主婦では,活動遷移時であっても情報提供が許容. 検出数も減少するため,閾値の調整だけでなく,立位. されない状況も考えられる.また,本研究では実験実. の検出を組み込むなど,より適切な判定アルゴリズム. 施に先立って部屋を片付けるよう参加者に依頼したた. を検討する必要がある.. め,実験環境は完全な意味での日常生活場面とは異な. もう一方の低許容度の原因である一時離席後の活動 再開を検出するためには,本来は復席後の活動を認識. る.今後は,より広範で一般的な対象や環境での評価 が必要である.. する必要があるが,多様な生活環境での実現は困難で. 一方,本研究では活動遷移に着目して情報提供タイ. ある.そこで我々は,近似的に活動再開を判定する手. ミングを検討したが,対象外とした非活動遷移時にも,. 法として,離席時間が長くなると以前の活動に関する. 情報提供が許容される場合が少数存在し,確認したと. 作業記憶が失われて活動再開意欲も減退するとの仮定. ころ,それらは余暇行動中や活動への従事度が低い場. の下,離席時間と許容度の関係を分析した. [34]. .その. 合であった.これらのケースも検出することが可能に. 結果,3 分以上離席した時は許容度が高くなる傾向が. なれば,より多くの情報提供機会が得られるものと期. 見られた.しかし,本実験で移動後と判定された情報. 待される.. 提供 118 回のうち 86 回は離席 3 分未満であり,これ. また,4.2 節で述べたように,タイミングに対する. らを除外すると,本来は許容される提供機会の逸失に. 許容度と内容に対する許容度の間の相関は低いが,い. つながる.より適切に活動再開意図を検出できる指標. ずれもが総合的な許容度と相関していた.すなわち,. の検討が今後の課題である.. 提供タイミングと内容への興味のそれぞれが総合的な. 注視対象変化判定時の高許容度の抽出可能性. 許容度に影響することが再確認された.さらに,提供. 当初の仮説に反して,注視対象変化には情報提供に. される情報の受け入れやすさには,興味の有無以外も. 不適な場合が多数含まれていた.そこで,当該ケース. 影響する可能性が予想される.例えば,リマインドな. の記録画像を確認したところ,顔を検出しているが方. どの緊要度の高い情報と広告のような緊要度の低い情. 向を大きく間違えている場合があり,特に参加者 B で. 報では,必然的に許容度が変わると考えられる.提供. は顔検出が不安定になって,見かけ上,顔方向が上下. タイミングやユーザの興味,情報の緊急度など様々な. 5. 3. ( (101 7 )). 235 141.
(54) ヒューマンインタフェース学会論文誌 Vol.23, No.2, 2021. 表 3 注視対象変化時において 8 秒間の顔回転角が 180 度を超過したものを除外し た結果(括弧内は除外前の値). Table 3 Effect of exclusion of the cases accompanied by over-180-degrees gazedirection change within 8s. 実験参加者 誤検出数*. A 0(4). B 2(7). C 1(10). D 1(4). E 3(18). 誤検出以外の回数. 9(22). 10(19). 42(62). 24(36). 7(24). 総情報提供回数. 9(26). 12(26). 43(72). 許容度 1,2 の割合 33.3%(27.0%) 41.7%(53.8%) 11.6%(20.8%) *顔を検出できているが方向を大きく間違えている場合. 要因を反映する総合的なデザインによって,よりユー ザに許容される能動的情報提供エージェントが実現さ れるものと期待される.. 6.. まとめ. 本研究では,スマートディスプレイ等による家庭内 での能動的な音声情報提供の実現に向けて,活動遷移 時は情報提供が許容されるとの仮説のもと,移動や注 視対象変化を検出して仮想キャラクタがネットニュー スを提供するシステムを試作し,独居者 5 名を対象に 日常生活場面での情報提供実験を行った. その結果,移動時はおおむね提供に適しており,仮 説が支持された.他方,頭部の方向変化を用いて検出 した注視対象変化時は,実際には注視対象が変化して いない場合などを含むため,移動時よりも不適切な場 合が多く含まれる結果となった.しかし,注視対象変 化は発生頻度が高いため,スマートフォン利用中の姿 勢変化に伴う頭部運動などに起因する誤判定が低減さ れれば,情報提供機会の適切な指標となる可能性が期 待される. 活動遷移のより確実な検出方法に加えて,対象ユー ザの拡大,さらに提供する情報にあわせたタイミング や提供方法の総合的な設計などが今後の課題である. 謝辞 活動遷移検出の基礎となる人検出プログラムを提供 いただいた藤本雄一郎助教(現奈良先端科学技術大学 院大学),ならびにシステムに関して有益な議論をい ただいた KDDI 総合研究所田坂和之氏,柳原広昌氏 に感謝する.. 参考文献 [1] Luria, M., Hoffman, G., Zuckerman, O.: Comparing Social Robot, Screen and Voice Interfaces for Smart-Home Control; Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, pp. 580-592 (2017). [2] Vtyurina, A., Fourney, A.: Exploring the Role of Conversational Cues in Guided Task Support with Virtual Assistants; Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, 208 (2018). 236 142. ( (102 8 )). 25(40). 10(42). 0.0%(10.0%). 0.0%(11.9%). [3] Sciuto, A., Saini, A., Forlizzi, J., Hong, J.I.: “ Hey Alexa, What ’s Up? ”: A Mixed-Methods Studies of In-Home Conversational Agent Usage; Proceedings of the 2018 Designing Interactive Systems Conference, pp. 857-868 (2018). [4] Linden ,G., Smith, B., York J.: Amazon.com Recommendations: Item-to-Item Collaborative Filtering; IEEE Internet Computing, Vol 7, No. 1, pp. 76-80 (2003). [5] Billsus, D., Brunk, C.A., Evans, C., Gladish, B., Pazzani, M.: Adaptive Interfaces for Ubiquitous Web Access; Communications of the ACM, Vol. 45, No. 5, pp. 34-38 (2002). [6] Cumin, J., Lefebvre, G., Ramparany, F., Crowley, J.L.: Inferring Availability for Communication in Smart Homes Using Context; Proceedings of the IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom), pp. 1-6 (2018). [7] Vastenburg, M.H., Keyson, D.V., Ridder, H.De.: Considerate home notification systems: a field study of acceptability of notifications in the home; Personal and Ubiquitous Computing, Vol. 12, Issue 8, pp. 555-566 (2008). [8] Iqbal, S.T., Bailey, B.P.: Investigating the effectiveness of mental workload as a predictor of opportune moments for interruption; Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, pp. 1489-1492 (2005). [9] Tanaka, T., Abe, R., Aoki, K., Fujita, K.: Interruptibility Estimation Based on Head Motion and PC Operation; International Journal of HumanComputer Interaction, Vol. 31, Issue 3, pp. 167-179 (2011). [10] Okoshi, T., Tsubouchi, K., Taji, M., Ichikawa, T., Tokuda, H.: Attention and EngagementAwareness in the Wild: A Large-Scale Study with Adaptive Notifications; Proceedings of the IEEE International Conference on Pervasive Computing and Communications (PerCom), pp. 100-110 (2017). [11] 藤本雄一郎, 永澤由基, 徐建鋒, 田坂和之, 柳原広昌, 藤田欣也: 音声によるプッシュ型情報提供にむけた身 体動作に基づく情報的機会の推定可能性; ヒューマン インタフェースシンポジウム予稿集, 7D1-5 (2017). [12] 小森光月, 藤本雄一郎, 徐建鋒, 田坂和之, 柳原広昌, 藤田欣也: 独居者宅内での行動遷移に基づく音声情報 提示機会の推定にむけた実験的検討; ヒューマンイン タフェースシンポジウム予稿集, 6C1-2 (2018). [13] Nakanishi J., Baba J., Kuramoto I., Ogawa K., Yoshikawa Y., Ishiguro H., :Smart speaker vs. social robot in a case of hotel room; Proceedings of the 2020 IEEE/RSJ International Conference on.
(55) 自宅での仮想キャラクタによる能動的情報提供が許容されるタイミングの検討. [14]. [15] [16]. [17]. [18]. [19]. [20]. [21]. [22]. [23]. [24]. [25]. Intelligent Robots and Systems (IROS ’20), pp. 11391-11396 (2020). Porcheron, M., Fischer, J.E., Reeves, S., Sharples, S.: Voice Interface in Everyday Life; Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, 640 (2018). 山田誠二: 人とロボットの<間>をデザインする; 東 京電機大学出版局 (2007). Saunderson, S., Nejat, G.: How robots influence humans: A survey of nonverbal communication in social human-robot interaction; International Journal of Social Robotics, Vol. 11, No. 4, pp. 575608 (2019). Paiva, A., Leite, I., Boukricha, H., Wachsmuth, I.: Empathy in virtual agents and robots; ACM Transactions on Interactive Intelligent Systems, Vol.7, No.3, pp. 1-40 (2017). Smith, H.J., Neff, M.: Communication Behavior in Embodied Virtual Reality; Proceedings of the CHI Conference on Human Factors in Computing Systems, 289 (2018). Admoni, H., Weng, T., Hayes, B., Scassellati, B.: Robot nonverbal behavior improves task performance in difficult collaborations; Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction (HRI), pp. 51-58 (2016). Aly, A., Tapus, A.: A model for synthesizing a combined verbal and nonverbal behavior based on personality traits in human-robot interaction; Proceedings of the 8th ACM/IEEE International Conference on Human-Robot Interaction (HRI), pp. 325-332 (2013). Andrist, S., Gleicher, M., Mutlu, B.: Looking Coordinated: Bidirectional Gaze Mechanisms for Collaborative Interaction with Virtual Characters; Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, pp. 2571-2582 (2017). Ochs, M., Pelachaud, C.: Model of the perception of smiling virtual character; Proceedings of the 11th International Conference on Autonomous Agents and Multiagent Systems, pp. 87-94 (2012). Hartmann, B., Mancini, M., Pelachaud, C.: Implementing expressive gesture synthesis for embodied conversational agents; Proceedings of the 6th international conference on Gesture in HumanComputer Interaction and Simulation, pp. 188-199 (2005). Noda, K: Google Home: smart speaker as environmental control unit; Disability and Rehabilitation Assistive Technology, Vol. 13. No.7, pp. 674-675 (2018). 川口一画, 葛岡英明, マクミランドナルド: スマートス ピーカにおける注視の入出力を用いたインタラクショ ンの効果; ヒューマンインタフェース学会論文誌, Vol.. 21, No. 3, pp. 269-278 (2018). [26] 板敷尚, 西脇裕作, 大島直樹, 岡田美智男: なぜスマー トスピーカはよそよそしいのか?ロボットとの親近感 を生み出す代名詞の役割; ヒューマンインタフェース 学会論文誌, Vol. 22, No. 2, pp.65-76 (2020).. [27] Li, C., Yanagisawa, H.: Intrinsic motivation in virtual assistant interaction; International Symposium on Affective Science and Engineering, pp. 1-5 (2019). [28] Takemae, Y., Chaki, S., Ohno, T., Yoda, I., Ozawa, S.: Analysis of Human Interruptibility in the Home Environment; CHI ’07 Extended Ab( (103 9 )). [29]. [30]. [31]. [32] [33]. [34]. stracts on Human Factors in Computing Systems, pp.2681-2686 (2007). 田中貴紘, 深澤伸一, 竹内晃一, 野中雅人, 藤田欣也: 業務従事者を対象とした PC 作業時の割り込み拒否 度推定法の検討; 情報処理学会論文誌, Vol.53, No.1, pp. 126-137 (2012). Banerjee, S., Silva, A., Feigh, K., Chernova, S.: Effects of Interruptibility-Aware Robot Behavior; arXiv preprint arXiv:1804.06383 (2018). 仲澤悠太, 藤江律也, 徐建鋒, 田坂和之, 柳原広昌, 藤田 欣也: 仮想キャラクタを用いたユーザの活動状態に基 づく生活情報の能動的提供システム; ヒューマンイン タフェース学会研究報告集, Vol. 22, No. 1, pp 11-18 (2020). グノシー, https://gunosy.com/ (Access in September 2020). 西澤信行, 小原朋広, 菅谷史昭: 組み込みシステム向け 日本語テキスト音声合成ソフトウェア, 情報処理学会 研究報告, VoL2017-SLP-118, No.7, pp. 1-8 (2017). 藤江律也, 仲澤悠太, 徐建鋒, 田坂和之, 柳原広昌, 藤田 欣也: 自宅での仮想キャラクタによる能動的情報提供 が許容されるタイミングの実験的検討; ヒューマンイン タフェースサイバーコロキウム予稿集, 1B4-4 (2020).. (2020 年 11 月 10 日受付,2021 年 2 月 15 日再受付). 著者紹介 藤江. 律也 2019 年東京農工大学大学工学部情報工 学卒業.現在,同大学院博士前期課程 在学中.エージェントによる在宅ユー ザへの能動的情報提供の研究に興味を 持つ.能動的情報提供に適したタイミ ングの検討に従事.. 仲澤. 悠太 2020 年東京農工大学大学工学部情報工 学卒業.現在,同大学院博士前期課程 在学中.エージェントによる在宅ユー ザへの能動的情報提供の研究に興味を 持つ.能動的情報提供に適したエージェ ントの外観や挙動,および提供情報の 検討に従事.. 徐. 建鋒 2001 年中国清華大学工学部卒業.2004 年同大学大学院修士課程修了.2007 年東京大学大学院博士課程修了.同年 (株)KDDI 研究所入社.現在, (株) KDDI 総合研究所メディア認識グルー プ研究主査.主に画像認識や行動解析, コンテキスト理解の研究開発に従事.博 士(工学).. 237 143.
(56) ヒューマンインタフェース学会論文誌. Vol.23, No.2, 2021. 小森田 賢史 2006 年東京大学大学院情報理工学系 研究科電子情報工学専攻修士課程修了. 同年 KDDI 株式会社入社.移動体通信 技術の研究開発,IEEE 標準化,移動 体端末開発,画像認識にかかわる研究 開発に従事.現在,株式会社 KDDI 総 合研究所メディア認識グループ・グルー プリーダー.2013 年電子情報通信学会 学術奨励賞.電子情報通信学会会員.. 内藤. 整 1996 年早稲田大学大学院理工学研究科 修了.同年国際電信電話株式会社 (現 KDDI) に入社.現在,株式会社 KDDI 総合研究所執行役員 (メディア ICT 部 門担当).映像伝送およびマルチメディ ア信号処理に関わる研究開発に従事. 映像情報メディア学会調査理事,同学 会 MTA 副委員長,情報処理学会オー ディオビジュアル複合情報処理研究会 (AVM) 主査を歴任.博士 (国際情報通 信学).. 藤田. 欣也. (正会員) 1988 年慶應義塾大学大学院理工学研究 科修了.相模工業大学,東北大学医学 部,岩手大学を経て,現在東京農工大 学大学院教授.知的生産性の向上にむ けたオフィス作業者の状況推定や情報 通知の制御,テレワーク支援システム など,人と共生する知的情報システム のためのヒューマンインタフェースの 研究に従事.バイオメカニズム学会理 事,日本バーチャルリアリティ学会理 事,本学会理事,副会長などを歴任.工 学博士.. (C)NPO法人ヒューマンインタフェース学会. 238 144. ((104 10 )).
(57)
図

+2

関連したドキュメント
Adaptive-Agent Simulation Analysis of a Simple Transportation Network, Proceedings of the Joint 2nd International Conference on Soft Computing and Intelligent Systems and
近年の動機づ け理論では 、 Dörnyei ( 2005, 2009 ) の提唱する L2 動機づ け自己シス テム( L2 Motivational Self System )が注目されている。この理論では、理想 L2
主として、自己の居住の用に供する住宅の建築の用に供する目的で行う開発行為以外の開
研究計画書(様式 2)の項目 27~29 の内容に沿って、個人情報や提供されたデータの「①利用 目的」
ー コネクテッド・ドライブ・サービス ー Apple CarPlay プレパレーション * 2 BMW サービス・インクルーシブ・プラス(
2 To introduce the natural and adapted bases in tangent and cotangent spaces of the subspaces H 1 and H 2 of H it is convenient to use the matrix representation of
題が検出されると、トラブルシューティングを開始するために必要なシステム状態の情報が Dell に送 信されます。SupportAssist は、 Windows
本文書の目的は、 Allbirds の製品におけるカーボンフットプリントの計算方法、前提条件、デー タソース、および今後の改善点の概要を提供し、より詳細な情報を共有することです。
