122
2.5.
GPS の L2P(Y)と L2C 信号間の擬似距離バイアスの補正値を推定する方法
GPS の L2P(Y)信号と L2C 信号間で発生する擬似距離バイアス(以下、L2P-L2C バ イアス)の補正値を推定する方法について調査した。 L2P-L2C バイアスは、主に受信機内の各信号用回路間の遅延差に起因して擬似距離観 測値に現れるバイアスである。 GPS L2P(Y)擬似距離、及び L2C 擬似距離をそれぞれ以下のように定義する。 GPS L2P(Y): 𝑃𝑟𝑝s = 𝜌𝑟𝑠+ 𝑑𝑡𝑟 − 𝑑𝑡𝑠 + α𝑟𝑗s + 𝜀 (25) GPS L2C: 𝑃𝑟𝑐s = 𝜌𝑟𝑠+ 𝑑𝑡𝑟 − 𝑑𝑡𝑠 + α𝑟𝑗s − Εs + Ε𝑟 + 𝜀 (26) ここで、 𝑃𝑟𝑝𝑠、𝑃𝑟𝑐𝑠 :受信機r と衛星 s 間の L2P(Y)擬似距離、L2C 擬似距離 𝜌𝑟𝑠 :受信機r と衛星 s 間の幾何学距離 𝑑𝑡𝑟 :受信機時計誤差 𝑑𝑡𝑠 :衛星時計誤差 α𝑟𝑗s :周波数依存の大気遅延(対流圏遅延、電離層遅延) Εs :L2P(Y)に対する衛星側の擬似距離バイアス Ε𝑗 :L2P(Y)に対する受信機側の擬似距離バイアス ε :マルチパスを含む観測誤差 GPS L2P(Y)と GPS L2C の差分を取ることにより、L2P(Y)に対する衛星側の擬似距 離バイアスと受信機側の擬似距離バイアスとマルチパスを含む観測誤差のみが残る。 GPS L2P(Y)-GPS L2C: 𝑃𝑟𝑝𝑐s = −Εs + Ε𝑟 + 𝜀 (27) GPS L2P(Y)と GPS L2C の差分から衛星側の擬似距離バイアスを消去することで、受 信機側の擬似距離バイアスが得られる。衛星側の擬似距離バイアスはCODE(Center for Orbit Determination in Europe)か らP2-C2 Differential Code Bias として定期的に推定、提供されており、この値を使用 して消去することができる。なお、この値は絶対値ではなく、相対値となることに注意 が必要である。観測誤差は適当な時間で平均することで影響を小さくすることができる。
123
2.6.
GPS の L2P(Y)と L2C 信号間の擬似距離バイアスの観測条件による変化
GPS の L2P(Y)信号と L2C 信号間で発生する擬似距離バイアスが、メーカや機種、温 度変化、アンテナ機種、受信機ファームウェアバージョン、受信機再起動、受信機個体 差等で変化するか否かを調査した。調査には、実際に観測したデータを使用した。また、 検証用プログラムを開発し、そのデータを解析した。 2.6.1. 擬似距離バイアスの推定 観測データは、2.2 の様々な観測条件で観測したデータを使用した。L2P-L2C バイア スの推定は、2.6 の手法の通り、RINEX 形式の 24 時間分の観測データが含まれるファ イルを使用し、衛星ごとにエポックごとでL2P(Y)擬似距離と L2C 擬似距離の差を取り、 衛星ごとで平均した後、全ての衛星で平均をとりL2P-L2C バイアスとした。 なお、衛星側のバイアスの補正にはCODE から提供される月ごとの P2-C2 バイアス が含まれるDCB ファイルを使用した。また、最初の観測が 8 月であることから 8 月の DCB ファイルを使用した。 実際の推定では、これら計算処理を行うスクリプトを作成し、一括で処理した。今回 推定するバイアスは2 台の受信機の組み合わせによる相対的な値ではなく、受信機ごと に得られる値である。 2.6.2. 擬似距離バイアスの観測条件による変化 受信機ごとに推定したL2P-L2C バイアスの値を表 2-107 と表 2-108 にまとめた。ま た、各観測条件によるL2P-L2C バイアスの変化をみるために、0m 観測条件の初日を基 準とした差を取り、さらに、各受信機で0.5m ずつずらしてプロットした図を図 2-79 と 図 2-80 に示す。また、最初の 0m 基線観測条件の 14 日間で得られた L2P-L2C バイア スの平均値を表 2-109 に示す。また、その標準偏差を表 2-110 に示す。なお、Javad D2 受信機は追加観測の0m 観測条件 2 日間で得られた値を平均した。 なお、追加観測の受信機再起動の観測条件は、受信機再起動前後の観測時間が最短で 3 時間と短く、これは擬似距離残差の衛星系間の差の時間による変動を考慮すると推定 精度が悪く、推定値の信頼性が低くなるため、評価から外した。 L2P-L2C バイアス推定結果から、各観測条件で変化がみられた。変化量は、平均の差 で、アンテナ交換の観測条件でTrimble2 受信機に 7.7cm、1m 基線の観測条件で Javad S 受信機に-8.1cm、温度変化の観測条件で Trimble1 受信機に-15.9cm であり、全て 1m 以内の小さな変化であった。 また、受信機ごとに異なる値が得られたが、最大でもLeica 受信機の-72cm であり、 GPS と Galileo 間の擬似距離 ISB と比較し、小さい値であった。124
表 2-107 L2P-L2C バイアス
観測条件 日付 Javad D1 Javad S Leica Topcon Trimble1 Trimble2
0m 8 月 29 日 -0.433 -0.229 -0.724 -0.224 0.321 0.228 8 月 30 日 -0.429 -0.197 -0.714 -0.210 0.334 0.234 8 月 31 日 -0.420 -0.197 -0.721 -0.213 0.352 0.246 9 月 1 日 -0.439 -0.205 -0.725 -0.216 0.350 0.247 9 月 2 日 -0.441 -0.218 -0.727 -0.225 0.336 0.233 9 月 3 日 -0.446 -0.196 -0.717 -0.214 0.337 0.230 9 月 4 日 -0.438 -0.216 -0.719 -0.209 0.329 0.224 9 月 5 日 -0.452 -0.221 -0.718 -0.223 0.324 0.227 9 月 6 日 -0.469 -0.246 -0.720 -0.233 0.311 0.216 9 月 7 日 -0.441 -0.211 -0.719 -0.209 0.324 0.231 9 月 8 日 -0.440 -0.209 -0.721 -0.215 0.321 0.229 9 月 9 日 -0.461 -0.222 -0.721 -0.222 0.321 0.227 9 月 10 日 -0.467 -0.237 -0.724 -0.224 0.318 0.226 9 月 11 日 -0.443 -0.238 -0.722 -0.213 0.321 0.237 アンテナ 交換 9 月 13 日 -0.469 -0.223 -0.734 -0.243 0.329 0.164 9 月 14 日 -0.460 -0.216 -0.736 -0.231 0.337 0.176 9 月 18 日 -0.466 -0.256 -0.728 -0.265 0.320 0.137 9 月 19 日 -0.445 -0.232 -0.735 -0.258 0.324 0.140 受信機 再起動 9 月 23 日 -0.482 -0.262 -0.735 -0.243 0.325 0.231 9 月 25 日 -0.461 -0.275 -0.730 -0.235 0.315 0.229 9 月 26 日 -0.455 -0.280 -0.725 -0.260 0.302 0.219 受信機 FW 10 月 1 日 -0.494 -0.285 -0.728 0.296 0.223 10 月 2 日 -0.478 -0.271 -0.734 0.288 0.228 10 月 3 日 -0.472 -0.271 -0.733 0.314 0.250 10 月 4 日 -0.485 -0.280 -0.728 0.291 0.235 10 月 5 日 -0.494 -0.279 -0.735 0.301 0.239 10 月 6 日 -0.496 -0.279 -0.737 0.317 0.251 10 月 7 日 -0.489 -0.293 -0.727 0.310 0.247 1m 10 月 18 日 -0.479 -0.304 -0.743 -0.229 0.260 0.179 10 月 19 日 -0.484 -0.291 -0.731 -0.227 0.253 0.171 10 月 20 日 -0.520 -0.286 -0.735 -0.220 0.242 0.164 10 月 21 日 -0.473 -0.311 -0.737 -0.237 0.252 0.176
125 10 月 22 日 -0.492 -0.308 -0.738 -0.232 0.253 0.173 10 月 23 日 -0.486 -0.293 -0.740 -0.229 0.253 0.174 温度変化 高温 11 月 1 日 -0.500 -0.182 -0.693 -0.204 0.441 0.200 11 月 2 日 -0.511 -0.178 -0.693 -0.216 0.448 0.201 11 月 3 日 -0.513 -0.191 -0.692 -0.213 0.445 0.202 11 月 4 日 -0.516 -0.189 -0.695 -0.219 0.438 0.207 温度変化 常温 11 月 5 日 -0.532 -0.252 -0.709 -0.227 0.295 0.201 11 月 6 日 -0.525 -0.256 -0.715 -0.228 0.281 0.197 11 月 7 日 -0.529 -0.250 -0.713 -0.223 0.280 0.196 11 月 8 日 -0.531 -0.250 -0.716 -0.223 0.282 0.196 表 2-108 L2P-L2C バイアス(追加観測)
観測条件 日付 Javad D1 Javad S Javad D2
0m 11 月 13 日 -0.491 -0.276 -0.506 11 月 14 日 -0.513 -0.265 -0.481 1m 11 月 16 日 -0.506 -0.276 -0.505 11 月 17 日 -0.507 -0.263 -0.510 アンテナ 個体差 11 月 19 日 -0.498 -0.274 -0.480 11 月 20 日 -0.493 -0.276 -0.476 アンテナ スプリッ タ 11 月 22 日 -0.507 -0.510 11 月 23 日 -0.511 -0.503 11 月 24 日 -0.492 -0.494 受信機 再起動 11 月 26 日 -0.289 -0.498 11 月 26 日 -0.415 -0.267 -0.699 11 月 27 日 -0.509 -0.287 -0.504
観測条件 日付 Leica Topcon Trimble1 Trimble2
0m 11 月 13 日 -0.723 -0.195 0.240 0.192 11 月 14 日 -0.726 -0.200 0.245 0.192 1m 11 月 16 日 -0.729 -0.201 0.203 0.162 11 月 17 日 -0.721 -0.214 0.216 0.179 アンテナ 個体差 11 月 19 日 -0.724 -0.193 0.240 0.203 11 月 20 日 -0.730 -0.217 0.235 0.195 アンテナ スプリッ 11 月 22 日 11 月 23 日
126 タ 11 月 24 日 受信機 再起動 11 月 26 日 11 月 26 日 -0.210 0.259 0.216 11 月 27 日 -0.217 0.250 0.215 図 2-79 L2P-L2C バイアス 図 2-80 L2P-L2C バイアス(追加観測)
127 表 2-109 L2P-L2C バイアス平均値 受信機 L2P-L2C バイアス (m) Javad D1 -0.444 Javad D2 -0.496 Javad S -0.217 Leica -0.721 Topcon -0.218 Trimble 1 0.328 Trimble 2 0.231 表 2-110 L2P-L2C バイアス標準偏差 受信機 L2P-L2C バイアス (m) Javad D1 0.014 Javad D2 0.013 Javad S 0.016 Leica 0.003 Topcon 0.007 Trimble 1 0.012 Trimble 2 0.008
128
2.7.
GPS の L2P(Y)信号と L2C 信号間の擬似距離バイアスの変化が測位解の精
度及び安定性に与える影響
GPS の L2P(Y)信号と L2C 信号間で発生する擬似距離バイアスの観測条件による変化 が、測位解の精度及び安定性に与える影響について調査した。 2.7.1. L2P(Y)と L2C 間の搬送波位相サイクルシフト補正と検証用プログラム GPS の L2P(Y)と L2C を組み合わせて解析する場合、L2P-L2C 間の擬似距離バイア スの他に、搬送波位相に現れる1/4 サイクルシフトの補正が必要であることが、H24 年 度の業務で分かっている。 そこで、GPS の L2P(Y)と L2C を組み合わせて解析する検証用プログラムを開発し、 L2P-L2C バイアスの補正値をテーブルとして与えて補正する機能とともに、搬送波位相 の1/4 サイクルシフト補正の機能を実装した。 検 証 用 プ ロ グ ラ ム に は 、RTKLIB v2.4.2 に含まれる後処理解析ソフトウェア RTKPOST の一部を改修した。 1/4 サイクルシフトの補正量は H24 年度の業務の調査結果をもとに表 2-111 の通りと した。なお、Javad D 受信機及び Javad S 受信機の観測データは Javad 製の RINEX 変 換ソフトでRINEX ファイル作成時に補正されるため、解析では補正しなかった。 なお、Leica 受信機は受信機で RINEX v. 2.11 で観測データが作成されるがこの形式 ではL2C の搬送波位相が出力できないため、1/4 サイクルシフト量は不明であるととも に、解析も実施していない。 ① GPS L2P-L2C バイアス補正機能 ② GPS L2C 搬送波位相 1/4 サイクルシフト補正機能 表 2-111 GPS L2C 1/4 サイクルシフト補正 受信機 補正量(サイクル) 備考Javad D、Javad S 0 RINEX 変換時に補正(-1/4)
Topcon +1/4 Trimble 0 受信機で補正(+1/4) 2.7.2. 受信機ハードウェアバイアス補正による影響 L2P-L2C バイアス及び搬送波位相 1/4 サイクルシフトの補正ありなしによる測位解へ の影響を調査するため、2.2 で観測した 0m 基線観測条件の初日 2013 年 8 月 29 日観測 の24 時間データを使用し、キネマティック基線解析した。衛星系は GPS のみとし、L2P とL2C を混ぜた観測データにより解析した。
129 補正は、受信機ごとに推定した表 2-109 の 0m 基線観測条件の L2P-L2C バイアス平 均値を使用し、受信機の組み合わせに応じてその差分を取り、補正値とした。受信機の 組み合わせは、基準点はJavad D1 受信機、ターゲット点を Topcon 受信機とした基線と、 基準点をTrimble1 受信機、ターゲット点を Topcon 受信機とした基線の 2 種類について 解析した。L2P-L2C バイアスの補正量を表 2-112 に示す。また、基線解析条件を表 2-113 に示す。 解析は、L2P-L2C バイアスも 1/4 サイクルシフトも補正しない解析、1/4 サイクルシ フトのみ補正する解析、L2P-L2C バイアスも 1/4 サイクルシフトも両方補正する解析の 3種類実施した。さらに、基準としてL2Pのみの観測データを使用した解析も実施した。 解析結果より、搬送波位相の 1/4 サイクルシフト補正しない場合に大きくフィックス 率が低下し、座標の精度も低下した。しかし、搬送波位相の1/4 サイクルシフト補正す ることでほぼ100%のフィックス解が得られた。なお、L2P-L2C バイアスの補正の影響 はみられず、Trimble1 受信機基準 Topcon 受信機の基線で-54.6cm の補正量であったが、 補正ありなしでフィックス率、座標の精度とも変化がなかった。2.7 の各観測条件による 変化でも最大-15.9cm であったことから、これは-54.6cm の補正量に比較して小さく、 観測条件によるL2P-L2C バイアスの変化の測位への影響はないと推測される。 表2-112 L2P-L2C バイアス補正量 受信機の組み合わせ 補正量(m) Javad D1-Topcon 0.226 Trimble1-Topcon -0.546 表2-113 RTKPOST による L2P-L2C バイアス補正解析設定 設定項目 設定値 測位方式 後処理キネマティック基線解析 Kinematic モード 周波数 GPS:2 周波(L1、L2) 衛星暦 放送暦 エポック間隔 15 秒 仰角マスク 15 度 アンビギュイティ決定モード Continuous アンビギュイティ決定最小レシオ 3.0 電離層補正 Klobuchar モデル 対流圏補正 Saastamoinen モデル
130 表 2-114 L2P-L2C 混合観測データの解析 Javad D1 受信機基準 Topcon 受信機 観測データと補正 Fix (%) RMS E (m) RMS N (m) RMS U (m) L2P 91.6 0.0016 0.0021 0.0040 L2P+L2C 全補正なし 33.8 0.0150 0.0226 0.0326 L2P+L2C L2C 1/4 補正のみ 99.8 0.0014 0.0019 0.0043 L2P+L2C 全補正あり 99.8 0.0014 0.0019 0.0043 表 2-115 L2P-L2C 混合観測データの解析 Trimble1 受信機基準 Topcon 受信機 補正 Fix (%) RMS E (m) RMS N (m) RMS U (m) L2P 100.0 0.0014 0.0018 0.0045 L2P+L2C 全補正なし 38.5 0.0137 0.0206 0.0286 L2P+L2C L2C 1/4 補正のみ 100.0 0.0015 0.0020 0.0049 L2P+L2C 全補正あり 100.0 0.0015 0.0021 0.0049 図 2-81 L2P-L2C 混合観測データの解析フィックス解の割合
131
図 2-82 L2P-L2C 混合観測データの解析 RMS 東西
図 2-83 L2P-L2C 混合観測データの解析 RMS 南北
132
2.8. 異なる衛星系の組み合わせが測位解の精度及び安定性に与える影響
GPS、GLONASS、Galileo、QZSS の組み合わせが、測位解の精度及び安定性等に与 える影響について調査した。この検証は、全ての組み合わせについて、異なる衛星系間 で位相差を取らない混合解析、位相差を取る統合解析、2.4 で検討した受信機ハードウェ アバイアスの変化を考慮し、GLONASS のみ位相差を取らない解析の 3 種類で解析した。 2.8.1. 観測データ 解析には、追加観測の1m 基線観測条件で観測した初日の 2013 年 11 月 16 日の 24 時 間データを使用した。衛星捕捉状況を衛星ごとに時系列にプロットした図を図 2-85 に 示す。このデータではGalileo は 24 時間中最初の 1 時間 56 分 30 秒しか 4 衛星同時捕 捉していない。そのため、例えばGPS と Galileo を組み合わせた解析で 24 時間データ による解析の場合、GPS の影響が大きくなる。そこで、24 時間データを使用した解析 とGalileo を 4 機捕捉している 1 時間 56 分 30 秒のデータのみを使用した解析の 2 通り を実施した。 受信機の組み合わせは全ての衛星系のデータを観測できる受信機の組み合わせとして、 基準点をJavad D1 受信機、ターゲット点を Trimble1 受信機とした。 表 2-116 観測データと受信機の組み合わせ 項目 値 データ観測日 1m 基線観測条件 2013 年 11 月 16 日 解析使用データ時間(1) 0 時 0 分 0 秒~23 時 59 分 45 秒 解析使用データ時間(2) 0 時 0 分 0 秒~1 時 56 分 30 秒 (Galileo4 機捕捉) 受信機組み合わせ 基準点 :Javad D1 受信機 ターゲット点 :Trimble1 受信機 解析に使用したデータの衛星数と各DOP の時系列プロットを図 2-86 に、また、GPS のみの場合の衛星数と各DOP の時系列プロットを図 2-87 に示す。 解析設定と同じ仰角マスク15 度の場合、GPS のみでは最小衛星数 5、最大衛星数 13 で、PDOP の平均は 2.3 であったが、全衛星系を使用すると、最小衛星数 10、最大衛星 数23、PDOP の平均は 1.5 であり、衛星数の増加に伴い、PDOP も大幅に改善されてい ることがわかる。133 青:L1、L2、L5 三周波捕捉、緑:L1、L2 二周波捕捉、赤:L1、L5 二周波捕捉 図 2-85 衛星捕捉状況(2013 年 11 月 13 日) 緑:衛星数、黄:GDOP、赤:PDOP、桃:HDOP、青:HDOP 図 2-86 衛星数と DOP(全衛星系) 図 2-87 衛星数と DOP(GPS のみ)
134 2.8.2. 検証用プログラムと解析設定 RTKLIB v2.4.2 に含まれる RTKPOST の一部を改修し、混合解析、統合解析、 GLONASS のみ混合解析、それぞれの解析用に開発した。全ての衛星系の組み合わせで 解析する機能、各衛星系の組み合わせに応じた擬似距離ISB、搬送波位相 ISB、IFB の 補正値をテーブルとして与え補正する機能を実装した。なお、本業務ではGPS と他の衛 星系の組み合わせで各補正値を推定したため、これらの補正値をテーブルとして与え、 GPS 以外の衛星系の組み合わせによる解析では、プログラム内部で GPS と他の衛星系 の組み合わせの補正値の差分を取ることで補正した。 全ての解析に共通する解析設定を表2-117 に示す。衛星系の組み合わせによってデー タに含まれる周波数は異なるが、解析設定ではL1、L2、L5 三周波全てを使用する設定 とした。測位方式はキネマティック基線解析とした。 表2-117 混合統合共通解析設定 設定項目 設定値 測位方式 後処理キネマティック基線解析 Kinematic モード 周波数 3 周波(L1、L2、L5) 衛星暦 放送暦 エポック間隔 15 秒 仰角マスク 15 度 アンビギュイティ決定モード Continuous アンビギュイティ決定最小レシオ 3.0 電離層補正 Klobuchar モデル 対流圏補正 Saastamoinen モデル
擬似距離ISB、搬送波位相 ISB、GLONASS IFB の補正値は、観測条件により変化が ほとんどみられなかったIFBのみ0m基線観測条件で推定した値を使用し、擬似距離ISB、 搬送波位相ISB は追加観測の 1m 基線観測条件で推定した値を使用した。IFB について は、GLONASS 単体、GLONASSとの混合解析では表 2-58 の手動で推定した GLONASS IFB を使用し、GLONASS と他の衛星系との統合解析では表 2-75 の手動で推定した GPS-GLONASS IFB を使用した。なお、擬似距離 ISB については、0m 基線観測条件 で推定した補正値と追加観測の 1m 基線観測条件で推定した補正値の差は、最大でも 20cm であった。また、搬送波位相 ISB については、GPS と Galileo、GPS と QZSS の 組み合わせでは、同じく0m 基線観測条件で推定した補正値と追加観測の 1m 基線観測 条件で推定した補正値の差は、最大でも3mm であった。
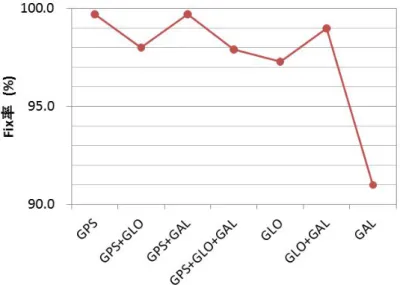
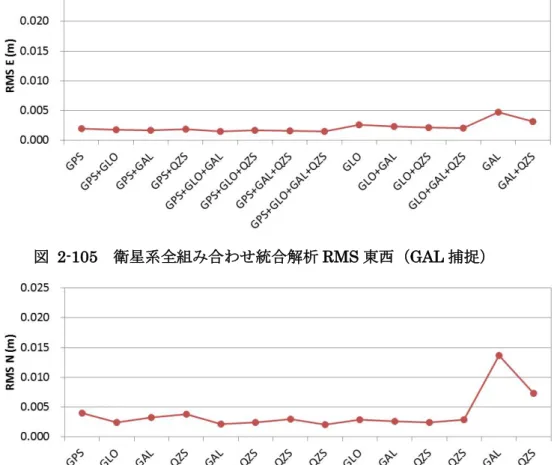
135 2.8.3. 異なる衛星系間で位相差を取らない解析 全ての衛星系の組み合わせについて、異なる衛星系間で位相差を取らない混合解析を 行った。衛星系の組み合わせと信号の組み合わせは表2-118 の通り 7 通りである。QZSS は1 機のため単独では混合解析できない。また、GPS の L5 信号を送信する衛星は 4 機 しかなく、三周波解析に使用できる時間帯は限られる。 混合解析では、GLNASS の IFB 以外、衛星系間でのバイアスが発生しないため、バ イアスの補正の必要がないことが長所である。 表2-118 混合解析の衛星系の組み合わせと信号 # GPS GLO GAL QZS 組み合わせ 全信号 共通信号 1 ● GPS L1+L2+L5 2 ● ● GPS+GLO L1+L2+L5 L1+L2 3 ● ● GPS+GAL L1+L2+L5 L1+L5 4 ● ● ● GPS+GLO+GAL L1+L2+L5 L1 5 ● GLO L1+L2 6 ● ● GLO+GAL L1+L2+L5 L1 7 ● GAL L1+L5 衛星系の組み合わせごとに 24 時間中得られたエポック数の割合とそのエポック数に おけるフィックス率、フィックス解の座標の精度 RMS をそれぞれ東西、南北、上下で に表2-119 まとめた。またそのプロット図を図 2-88 から図 2-92 に示す。 さらに、Galileo を捕捉した時間帯の 1 時間 56 分 30 秒のみで集計した結果を表 2-120 と図 2-93 から図 2-97 にまとめた。 24 時間の結果でみると、GPS に GLONASS を組み合わせることで 1.7%フィックス 率が低下したが、上下で 1.4mm であるが、水平、上下とも座標の精度は向上した。ま たGLONASS に Galileo を組み合わせることでフィックス率、座標の精度とも向上した。 Galileo を捕捉していた時間帯のみで集計した結果でも 24 時間とほぼ同様の結果が得 られた。GPS に Galileo を組み合わせる効果はほとんどみられなかった。
全体で比較すると、GPS と GLONASS の組み合わせ、GPS と GLONASS と Galileo の組み合わせが最も精度が良かったことから、衛星数増加の効果が大きいほど、精度向 上の効果も大きいと推測される。
136 表2-119 衛星系全組み合わせによる混合解析結果 # 衛星系組み合わせ Epoch (%) Fix (%) E (m) N (m) U (m) 1 GPS 100.0 99.7 0.0023 0.0032 0.0063 2 GPS+GLO 100.0 98.0 0.0019 0.0022 0.0049 3 GPS+GAL 100.0 99.7 0.0023 0.0031 0.0064 4 GPS+GLO+GAL 100.0 97.9 0.0019 0.0022 0.0051 5 GLO 98.6 97.3 0.0044 0.0032 0.0224 6 GLO+GAL 99.2 99.0 0.0043 0.0032 0.0218 7 GAL 7.9 91.0 0.0047 0.0137 0.0167 表2-120 衛星系全組み合わせによる混合解析結果(GAL 捕捉) # 衛星系組み合わせ Epoch (%) Fix (%) E (m) N (m) U (m) 1 GPS 100.0 99.4 0.0020 0.0040 0.0067 2 GPS+GLO 100.0 97.4 0.0018 0.0023 0.0051 3 GPS+GAL 100.0 99.4 0.0017 0.0033 0.0070 4 GPS+GLO+GAL 100.0 96.6 0.0015 0.0021 0.0059 5 GLO 100.0 99.8 0.0026 0.0029 0.0184 6 GLO+GAL 100.0 99.6 0.0023 0.0026 0.0145 7 GAL 97.0 91.0 0.0047 0.0137 0.0167
137
図 2-88 衛星系全組み合わせ混合解析エポックの割合
138
図 2-90 衛星系全組み合わせ混合解析 RMS 東西
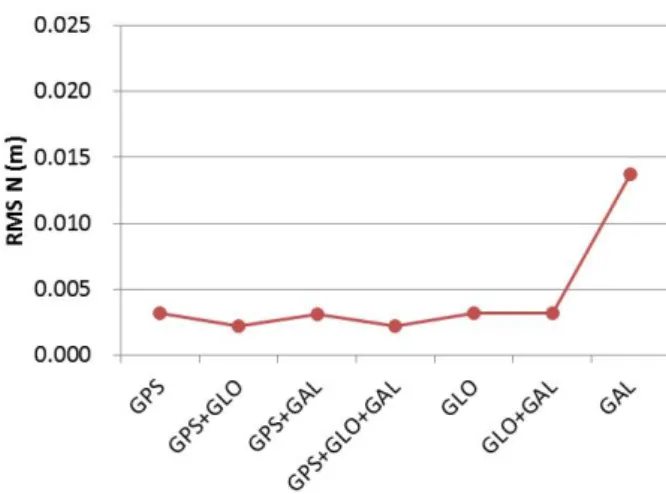
図 2-91 衛星系全組み合わせ混合解析 RMS 南北
139
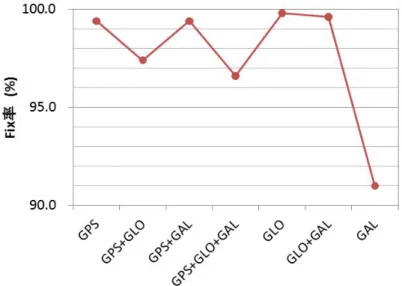
図 2-93 衛星系全組み合わせ混合解析エポックの割合(GAL 捕捉)
140
図 2-95 衛星系全組み合わせ混合解析 RMS 東西(GAL 捕捉)
図 2-96 衛星系全組み合わせ混合解析 RMS 南北(GAL 捕捉)
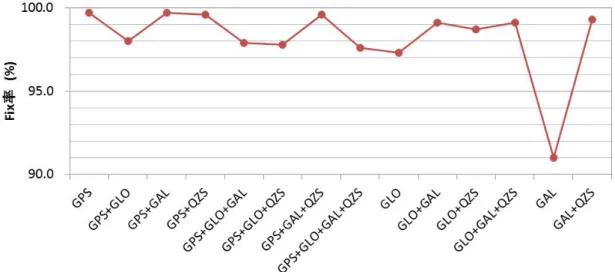
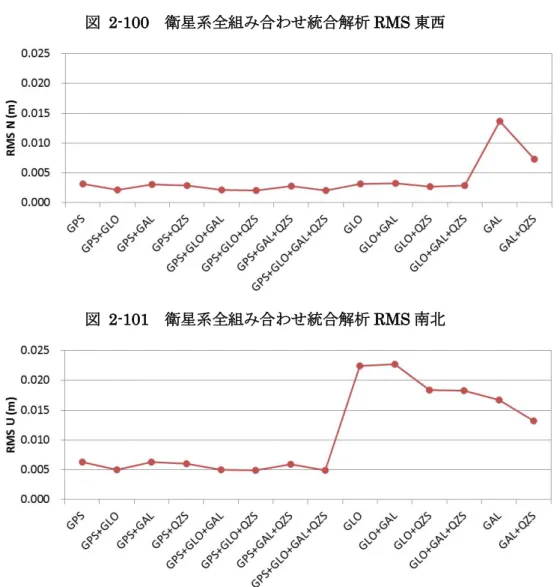
141 2.8.4. 異なる衛星系間で位相差を取る解析 全ての衛星系の組み合わせについて、異なる衛星系間で位相差を取る統合解析を行っ た。衛星系の組み合わせと信号の組み合わせは表2-121 の通り 14 通りである。前述の 通り、GPS の L5 信号を送信する衛星は 4 機しかなく、三周波解析に使用できる時間帯 は限られる。 統合解析では、衛星系間で発生するバイアスを補正する必要があるが、補正値をテー ブルで与えて補正した。 表2-121 統合解析の衛星系の組み合わせと信号 # GPS GLO GAL QZS 組み合わせ 全信号 共通信号 1 ● GPS L1+L2+L5 2 ● ● GPS+GLO L1+L2+L5 L1+L2 3 ● ● GPS+GAL L1+L2+L5 L1+L5 4 ● ● GPS+QZS L1+L2+L5 L1+L2+L5 5 ● ● ● GPS+GLO+GAL L1+L2+L5 L1 6 ● ● ● GPS+GLO+QZS L1+L2+L5 L1+L2 7 ● ● ● GPS+GAL+QZS L1+L2+L5 L1+L5 8 ● ● ● ● GPS+GLO+GAL+QZS L1+L2+L5 L1 9 ● GLO L1+L2 10 ● ● GLO+GAL L1+L2+L5 L1 11 ● ● GLO+QZS L1+L2+L5 L1+L2 12 ● ● ● GLO+GAL+QZS L1+L2+L5 L1 13 ● GAL L1+L5 14 ● ● GAL+QZS L1+L2+L5 L1+L5 衛星系の組み合わせごとに 24 時間中得られたエポック数の割合とそのエポック数に おけるフィックス率、フィックス解の座標の精度 RMS をそれぞれ東西、南北、上下で 表2-122 にまとめた。またそのプロット図を図 2-98 から図 2-102 に示す。 さらに、Galileo を捕捉した時間帯の 1 時間 56 分 30 秒のみで集計した結果を表 2-123 と図 2-103 から図 2-107 にまとめた。 24 時間の結果でみると、混合解析と同様に、GPS に GLONASS を組み合わせること で1.7%フィックス率が低下したが、上下で 1.3mm であるが、水平、上下とも座標の精 度は向上した。またGLONASS に Galileo、GLONASS に QZSS を組み合わせることで フィックス率が向上した。GLONASS に QZSS を組み合わせることで精度も向上した。
142 を組み合わせることで、座標の精度が向上した。また、Galileo に QZSS を組み合わせ ることで、フィックス率、座標の精度とも向上した。 全体で比較すると、GPS と GLONASS の組み合わせ、または、GPS と GLONASS にGalileo を組み合わせた場合、QZSS を組み合わせた場合、両方組み合わせた GPS、 GLONASS、Galileo、QZSS の組み合わせが最も精度が良かったことから、衛星数増加 の効果が大きいほど、精度向上の効果も大きいと推測される。なお、フィックス率、座 標の精度とも混合解析とほぼ同じであった。 表2-122 衛星系全組み合わせによる統合解析結果 # 衛星系組み合わせ Epoch (%) Fix (%) E (m) N (m) U (m) 1 GPS 100.0 99.7 0.0023 0.0032 0.0063 2 GPS+GLO 100.0 98.0 0.0019 0.0022 0.0050 3 GPS+GAL 100.0 99.7 0.0023 0.0031 0.0063 4 GPS+QZS 100.0 99.6 0.0023 0.0029 0.0060 5 GPS+GLO+GAL 98.6 97.9 0.0019 0.0022 0.0050 6 GPS+GLO+QZS 99.2 97.8 0.0019 0.0021 0.0049 7 GPS+GAL+QZS 7.9 99.6 0.0023 0.0028 0.0059 8 GPS+GLO+GAL+QZS 100.0 97.6 0.0019 0.0021 0.0049 9 GLO 100.0 97.3 0.0044 0.0032 0.0224 10 GLO+GAL 100.0 99.1 0.0044 0.0033 0.0227 11 GLO+QZS 100.0 98.7 0.0040 0.0027 0.0184 12 GLO+GAL+QZS 98.6 99.1 0.0040 0.0029 0.0183 13 GAL 99.2 91.0 0.0047 0.0137 0.0167 14 GAL+QZS 7.9 99.3 0.0032 0.0073 0.0132 表2-123 衛星系全組み合わせによる統合解析結果(GAL 捕捉) # 衛星系組み合わせ Epoch (%) Fix (%) E (m) N (m) U (m) 1 GPS 100.0 99.4 0.0020 0.0040 0.0067 2 GPS+GLO 100.0 97.4 0.0018 0.0024 0.0051 3 GPS+GAL 100.0 99.4 0.0017 0.0033 0.0063 4 GPS+QZS 100.0 99.4 0.0019 0.0038 0.0058 5 GPS+GLO+GAL 100.0 96.6 0.0015 0.0022 0.0052 6 GPS+GLO+QZS 100.0 97.4 0.0017 0.0024 0.0049 7 GPS+GAL+QZS 100.0 99.4 0.0016 0.0030 0.0059 8 GPS+GLO+GAL+QZS 100.0 96.6 0.0015 0.0021 0.0048
143 9 GLO 100.0 99.8 0.0026 0.0029 0.0184 10 GLO+GAL 100.0 99.4 0.0023 0.0026 0.0146 11 GLO+QZS 99.8 99.8 0.0022 0.0024 0.0163 12 GLO+GAL+QZS 100.0 99.4 0.0021 0.0029 0.0119 13 GAL 97.0 91.0 0.0047 0.0137 0.0167 14 GAL+QZS 97.0 99.8 0.0032 0.0073 0.0132
144
図 2-98 衛星系全組み合わせ統合解析エポックの割合
145
図 2-100 衛星系全組み合わせ統合解析 RMS 東西
図 2-101 衛星系全組み合わせ統合解析 RMS 南北
146
図 2-103 衛星系全組み合わせ統合解析エポックの割合(GAL 捕捉)
147
図 2-105 衛星系全組み合わせ統合解析 RMS 東西(GAL 捕捉)
図 2-106 衛星系全組み合わせ統合解析 RMS 南北(GAL 捕捉)
148 2.8.5. 受信機ハードウェアバイアスの変化を考慮した解析 GPS と GLONASS 間の搬送波位相 ISB が受信機再起動により変化することを考慮し、 GLONASS との組み合わせのみ混合解析とし、他の衛星系の組み合わせでは統合解析と する解析を、全ての衛星系の組み合わせについて行った。衛星系の組み合わせと信号の 組み合わせは表2-124 の通り 13 通りである。QZSS は 1 機のため GLONASS との混合 解析はできない。また、前述の通り、GPS の L5 信号を送信する衛星は 4 機しかなく、 三周波解析に使用できる時間帯は限られる。
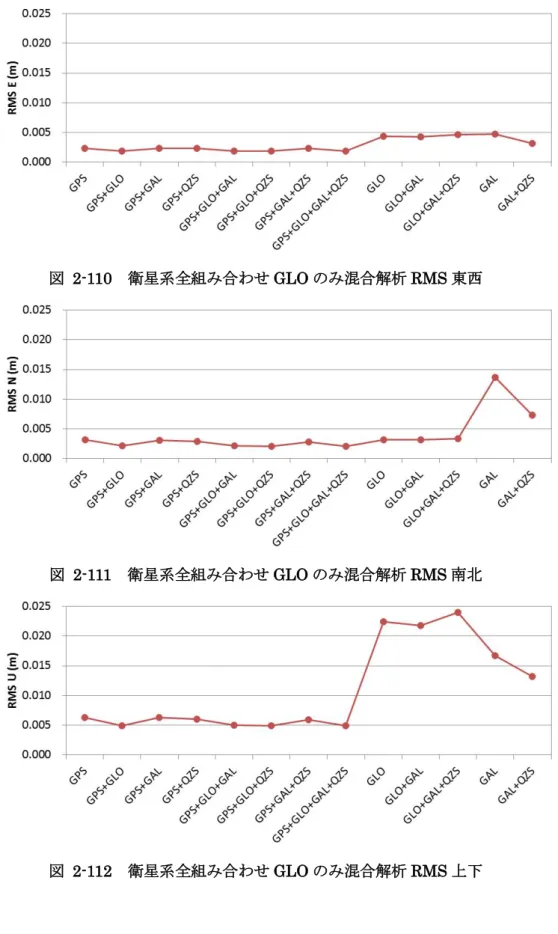
本解析では、GLONASS を組み合わせる場合は、GLONASS IFB の補正値をテーブル として与えて補正し、その他の組み合わせでは、衛星系間で発生するバイアスの補正値 をテーブルとして与えて補正した。 表2-124 GLO のみ混合解析の衛星系の組み合わせと信号 # GPS GLO GAL QZS 組み合わせ 全信号 共通信号 1 ● GPS L1+L2+L5 2 ● ● GPS+GLO L1+L2+L5 L1+L2 3 ● ● GPS+GAL L1+L2+L5 L1+L5 4 ● ● GPS+QZS L1+L2+L5 L1+L2+L5 5 ● ● ● GPS+GLO+GAL L1+L2+L5 L1 6 ● ● ● GPS+GLO+QZS L1+L2+L5 L1+L2 7 ● ● ● GPS+GAL+QZS L1+L2+L5 L1+L5 8 ● ● ● ● GPS+GLO+GAL+QZS L1+L2+L5 L1 9 ● GLO L1+L2 10 ● ● GLO+GAL L1+L2+L5 L1 11 ● ● ● GLO+GAL+QZS L1+L2+L5 L1 12 ● GAL L1+L5 13 ● ● GAL+QZS L1+L2+L5 L1+L5 衛星系の組み合わせごとに 24 時間中得られたエポック数の割合とそのエポック数に おけるフィックス率、フィックス解の座標の精度 RMS をそれぞれ東西、南北、上下で 表2-125 にまとめた。またそのプロット図を図 2-108 から図 2-112 に示す。 さらに、Galileo を捕捉した時間帯の 1 時間 56 分 30 秒のみで集計した結果を表 2-126 と図 2-113 から図 2-117 にまとめた。 混合解析や統合解析と同様に、GPS と GLONASS の組み合わせの効果が大きかった。
149 表2-125 衛星系全組み合わせによる GLO のみ混合解析結果 # 衛星系の組み合わせ Epoch (%) Fix (%) E (m) N (m) U (m) 1 GPS 100.0 99.7 0.0023 0.0032 0.0063 2 GPS+GLO 100.0 98.0 0.0019 0.0022 0.0049 3 GPS+GAL 100.0 99.7 0.0023 0.0031 0.0063 4 GPS+QZS 100.0 99.6 0.0023 0.0029 0.0060 5 GPS+GLO+GAL 100.0 97.9 0.0019 0.0022 0.0050 6 GPS+GLO+QZS 97.8 97.8 0.0019 0.0021 0.0049 7 GPS+GAL+QZS 94.3 99.6 0.0023 0.0028 0.0059 8 GPS+GLO+GAL+QZS 94.3 97.7 0.0019 0.0021 0.0049 9 GLO 98.6 97.3 0.0044 0.0032 0.0224 10 GLO+GAL 99.2 99.0 0.0043 0.0032 0.0218 11 GLO+GAL+QZS 93.8 98.9 0.0046 0.0034 0.0240 12 GAL 7.9 91.0 0.0047 0.0137 0.0167 13 GAL+QZS 7.9 99.3 0.0032 0.0073 0.0132 表2-126 衛星系全組み合わせによる GLO のみ混合解析結果(GAL 捕捉) # 衛星系の組み合わせ Epoch (%) Fix (%) E (m) N (m) U (m) 1 GPS 100.0 99.4 0.0020 0.0040 0.0067 2 GPS+GLO 100.0 97.4 0.0018 0.0023 0.0051 3 GPS+GAL 100.0 99.4 0.0017 0.0033 0.0063 4 GPS+QZS 100.0 99.4 0.0019 0.0038 0.0058 5 GPS+GLO+GAL 100.0 96.6 0.0015 0.0021 0.0053 6 GPS+GLO+QZS 100.0 97.4 0.0017 0.0024 0.0049 7 GPS+GAL+QZS 100.0 99.4 0.0016 0.0030 0.0059 8 GPS+GLO+GAL+QZS 100.0 96.6 0.0015 0.0020 0.0049 9 GLO 100.0 99.8 0.0026 0.0029 0.0184 10 GLO+GAL 100.0 99.6 0.0023 0.0026 0.0145 11 GLO+GAL+QZS 100.0 99.6 0.0020 0.0029 0.0119 12 GAL 97.0 91.0 0.0047 0.0137 0.0167 13 GAL+QZS 97.0 99.8 0.0032 0.0073 0.0132
150
図 2-108 衛星系全組み合わせ GLO のみ混合解析エポックの割合
151
図 2-110 衛星系全組み合わせ GLO のみ混合解析 RMS 東西
図 2-111 衛星系全組み合わせ GLO のみ混合解析 RMS 南北
152
図 2-113 衛星系全組み合わせ GLO のみ混合解析エポックの割合(GAL 捕捉)
153
図 2-115 衛星系全組み合わせ GLO のみ混合解析 RMS 東西(GAL 捕捉)
図 2-116 衛星系全組み合わせ GLO のみ混合解析 RMS 南北(GAL 捕捉)
154 2.8.6. 上空視界の悪い場合の解析 オープンスカイ環境では、GPS に GLONASS を組み合わせる効果はみられたが、 Galileo や QZSS を組み合わせる効果はほとんどみられなかったため、上空視界の悪い 環境を想定し、解析時に仰角マスクを15 度から 30 度に設定変更し、全衛星系の組み合 わせについて、キネマティック基線解析した。 解析は、GLONASS との組み合わせのみ混合解析とし、他の衛星系の組み合わせでは 統合解析とする解析とした。 衛星系の組み合わせごとに 24 時間中得られたエポック数の割合とそのエポック数に おけるフィックス率、フィックス解の座標の精度 RMS をそれぞれ東西、南北、上下で 表2-127 にまとめた。またそのプロット図を図 2-119 から図 2-122 に示す。 さらに、Galileo を捕捉した時間帯の 1 時間 56 分 30 秒のみで集計した結果を表 2-128 と図 2-123 から図 2-127 にまとめた。 24 時間の結果でみると、GPS のみと比較し、GPS に GLONASS を組み合わせること で解析使用エポック数が約 10%向上した。GLONASS のみと比較し場合、GLONASS にGalileo や QZSS を組み合わせることで、解析使用エポック数が増加した。Galileo を 組み合わせた場合に13%、さらに QZSS を組み合わせた場合に 35%増加した。Galileo を捕捉していた時間帯のみでみると、GLONASS に Galileo を組み合わせることで 77% 増加した。フィックス率においては、GPS との組み合わせではほとんど変化はみられな かった。 座標の精度はGPS のみと比較し、GLONASS や Galileo、QZSS 全ての組み合わせで 精度が向上した。Galileo を捕捉していた時間帯のみで集計した結果でみると、GPS に GLONASS と Galileo と QZSS 全てを組み合わせた場合に最も精度が向上し、特に上下 成分で大きな精度向上がみられた。 上空視界の悪い場合に、異なる衛星系を組み合わせることで、解析可能な時間が増加 し、24 時間で 99.8%という高いフィックス率で、精度の精度も向上するという効果が確 認できた。 表2-127 衛星系全組み合わせによる GLO のみ混合解析結果 # 衛星系の組み合わせ Epoch (%) Fix (%) E (m) N (m) U (m) 1 GPS 90.6 99.5 0.0038 0.0050 0.0141 2 GPS+GLO 100.0 99.9 0.0025 0.0028 0.0095 3 GPS+GAL 90.6 99.6 0.0037 0.0047 0.0132 4 GPS+QZS 90.6 99.8 0.0035 0.0044 0.0120 5 GPS+GLO+GAL 100.0 99.9 0.0025 0.0028 0.0091
155 6 GPS+GLO+QZS 100.0 99.8 0.0025 0.0025 0.0085 7 GPS+GAL+QZS 86.0 99.8 0.0035 0.0043 0.0120 8 GPS+GLO+GAL+QZS 95.5 99.8 0.0025 0.0025 0.0086 9 GLO 28.2 24.5 0.0054 0.0053 0.0422 10 GLO+GAL 41.2 63.6 0.0073 0.0087 0.0336 11 GLO+GAL+QZS 62.6 36.2 0.0064 0.0094 0.0318 12 GAL 0.0 0.0 13 GAL+QZS 0.0 0.0 表2-128 衛星系全組み合わせによる GLO のみ混合解析結果(GAL 捕捉) # 衛星系の組み合わせ Epoch (%) Fix (%) E (m) N (m) U (m) 1 GPS 99.8 99.8 0.0024 0.0053 0.0182 2 GPS+GLO 100.0 99.6 0.0020 0.0036 0.0131 3 GPS+GAL 100.0 99.8 0.0020 0.0037 0.0117 4 GPS+QZS 100.0 99.8 0.0022 0.0050 0.0122 5 GPS+GLO+GAL 99.6 99.6 0.0016 0.0029 0.0089 6 GPS+GLO+QZS 99.6 99.6 0.0018 0.0035 0.0087 7 GPS+GAL+QZS 99.8 99.8 0.0020 0.0035 0.0096 8 GPS+GLO+GAL+QZS 100.0 99.6 0.0016 0.0028 0.0076 9 GLO 21.8 100.0 0.0067 0.0049 0.0632 10 GLO+GAL 99.4 99.8 0.0042 0.0051 0.0277 11 GLO+GAL+QZS 98.9 99.4 0.0033 0.0043 0.0267 12 GAL 0.0 0.0 13 GAL+QZS 0.0 0.0
156
図 2-118 衛星系全組み合わせ GLO のみ混合解析エポックの割合
157
図 2-120 衛星系全組み合わせ GLO のみ混合解析 RMS 東西
図 2-121 衛星系全組み合わせ GLO のみ混合解析 RMS 南北
158
図 2-123 衛星系全組み合わせ GLO のみ混合解析エポックの割合(GAL 捕捉)
159
図 2-125 衛星系全組み合わせ GLO のみ混合解析 RMS 東西(GAL 捕捉)
図 2-126 衛星系全組み合わせ GLO のみ混合解析 RMS 南北(GAL 捕捉)
160
2.9.
BeiDou と他の衛星系との組み合わせの検討
中国の全地球用衛星航法システムBeiDou の座標系や時刻系、信号特性を調査し、調 査結果から、BeiDou 測位信号について他の衛星系との組み合わせが可能であるか検討 した。また、検討結果をもとに検証用プログラムを開発し、BeiDou 信号を測位(単独 測位と基線解析)に適用可能であるかを明らかにした。 2.9.1. BeiDou の特性 はじめに、BeiDou の概要 [8]と、比較のためGPS の概要 [9]を表 2-129 に整理した。 BeiDou は 2012 年 12 月から地域的衛星航法サービスを開始し、現時点で 5 機の静止軌 道(GEO :Geostationary Earth Orbit )衛星、5 機の傾斜静止軌道(IGSO:Inclined Geosynchronous Orbit)衛星、5 機の中軌道(MEO:Medium Earth Orbit)衛星の計 15 機の衛星が運用されている。BeiDou 衛星から放送される軌道情報は、GPS と同様の軌道 6 要素と摂動項で表現さ れる。BeiDou 衛星位置を表すための座標系は、中国の測地座標系の CGCS2000 (CGCS2000:Chinese Geodetic Coordinate Reference Frame 2000)で定義されてい るが、国際的な基準となる測地座標系のITRF 系(ITRF97)に準拠している [10]。さら
に、CGCS2000 と WGS84 との差は、現時点で cm レベルと報告されており、通常のコ ード擬似距離による単独測位では無視できる程度である[11]。また、現時点における
BeiDou 放送暦の軌道精度は図 2-128 に示す通りである [12]。測位精度に最も影響する
Radial 方向の軌道精度は、MEO 衛星、IGSO 衛星で 1 m 前後であり、GEO 衛星では 1.5 m ~2 m 程度である。他の文献[13]によれば、BeiDou による基線解析を行う場合、短
基線長(0~20 km)で最大 0.5 cm、中基線長(20~100 km)で最大 1 cm、長基線長(100 km 以上)で最大 10 cm の BeiDou の軌道誤差が二重位相差観測量に残存するとしてい る。
BeiDou 衛星の原子時計の時刻系は中国の UTC (NTSC)と同期した BeiDou 時刻 (BDT:BeiDou Time)で定義されている [8]。ただし、BeiDou 時刻は 2006 年の UTC
を基に開始した時刻であるため、GPS 時刻(GPST:GPS Time)と BeiDou 時刻の間 には2006 年のうるう秒の差(GPST=BDT+14)が存在する。また、これに加えて、GPST とBDST 間には、測定条件によるものの 7 ns 程度の不確定性が存在することも観測デ ータから推定されている [14]。このため、GPS 観測値と BeiDou 観測値を併用して単独 測位を行う場合では、両衛星系の時刻系を統一して扱わなければ数m の測位誤差が生じ ることが考えられる。一方で、GPS 観測値と BeiDou 観測値を併用して基線解析を行う 場合では、衛星系ごとの二重位相差のみを使用する「混合解析」方式 [15] [16]を適用する ことで、異なる衛星系間の観測値の差分を取らないため、衛星系間の時刻系の相違に起 因する観測誤差は発生しないものと考えられる。
161
表 2-129 BeiDou の概要
BeiDou GPS
軌道傾斜角 MEO,IGSO:55 度 55 度
軌道面 GEO: 1,MEO: 3,IGSO: 3 6
衛星の周回周期 MEO: 12 h 53 m 11 h 58 m 通信方式 CDMA CDMA 地上からの軌道高度 MEO: 21,528 km 20,180 km GEO,IGSO: 35,786 km 衛星位置の座標系 CGCS2000 (ITRF 準拠) WGS84 衛星原子時計の時刻系 BeiDou 時刻(UTC(NTSC)と同 期) GPS 時刻(UTC(USNO) と同期) 図 2-128 BeiDou 放送暦の軌道精度 次に、BeiDou 測位信号を調査するため、BeiDou 測位信号の基本的な特性について、
BeiDou 測位衛星の ICD(Interface Control Document)などの文献を基に確認し、 表 2-130 に整理した [8] [17] [18]。現時点では、BeiDou 測位信号 B1I と B2I について信号
162 表 2-130 BeiDou 測位信号の特性 表 2-130より、B1IとB2I信号に関しては、チップレートはGPSの2倍の2.046Mcps、 信号帯域幅は同じくGPS の 2 倍の 4.092MHz である。この特性は、耐マルチパスにお いて効果があると考えられるが、BeiDou の耐マルチパス性能を比較評価するため、 cc-difference と呼ばれる疑似距離と搬送波の差をとる方式により BeiDou の「マルチパ スと雑音成分」を抽出して検証した。cc-difference の詳細については H23 年度の業務(複 数信号)の報告書 [19]を参照されたい。オープンスカイ環境で取得した全 BeiDou 衛星 B1 信号におけるコードマルチパス誤差を図 2-129 に示す。横軸は仰角を表す。図 2-129 より、良好なマルチパス環境においては、BeiDou B1 信号の耐マルチパス性能は、GPS と比較して遜色ないことを確認した。 図 2-129 BeiDou のマルチパス誤差 2.9.2. BeiDou 信号による単独測位 BeiDou 観測値と GPS 観測値を併用して単独測位を行う場合、BeiDou の観測モデル にGPS と BeiDou 間の時刻差の項を未知数として加える必要がある。そして、この時刻 差の項を受信機のx,y,z 座標と受信機時計誤差の未知数と同様に、ガウス・ニュートンの 20 30 40 50 60 70 80 90 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2
Elevation angle (deg)
C o d e m u lt ip at h a n d r ec ei v er n o is e ( m ) BeiDou B1 15 RMSE: 0.24 m 20 30 40 50 60 70 80 90 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2
Elevation angle (deg)
C o d e m u lt ip at h a n d r ec ei v er n o is e ( m ) 15 GPS L1C/A RMSE: 0.25 m
163 最小二乗法やカルマンフィルタにより推定する方法をとる [11] [20] [21]。そこで、BeiDou 信号による測位の基本性能を把握するために、上記の測位方法を基にGPS と BeiDou を 組み合わせた単独測位プログラムを作成し、測位精度を検証した。測位環境・条件を表 2-131 にまとめる。また、図 2-130 に屋上のアンテナで受信した衛星数(仰角マスク角 15 度)を示す。この測位環境においては、GPS 衛星数は平均で 8 機、BeiDou 衛星数は 平均で8 機であった。 表 2-131 測位環境と条件 データ取得場所 東京海洋大学第4 実験棟屋上 データ取得日時 2013-08-01 0:00:00~23:59:30 (GPST, interval:30 s) 受信機 Trimble NetR9 アンテナ TRM57971.00 アンテナ精密位置 基線解析で得られたFIX 解 測位方法 一周波コード擬似距離による単独測位 GPS:L1 C/A、BeiDou:B1 推定フィルタ 最小二乗法 電離圏遅延量 補正モデル Klobuchar モデル 対流圏遅延量 補正モデル 静水圧遅延量の概略値と仰角で表わしたモデル 仰角マスク角 15 度 図 2-130 衛星数(場所:屋上、仰角マスク 15 度)
0
2
4
6
8
x 10
45
10
Time (s)
N u mb e r o f V is ib le S a te llite ( E L ma sk 1 5 d e g )GPS
BeiDou
164 図 2-131 に GPS 単独測位と GPS+BeiDou 単独測位の測位結果を示す。オープンスカ イ環境においては、GPS+BeiDou 単独測位精度は、図 2-131 a)の GPS 単独測位精度(水 平RMS 誤差:1.1 m 程度,垂直 RMS 誤差:2.6 m 程度)と比較してほぼ同等であるこ とを確認した。また、このときのB1 信号の擬似距離残差(標準偏差 0.8 m)は C/A 信 号の残差(標準偏差0.5 m)と同程度であるため、GPS+BeiDou 単独測位の測位精度は 妥当なものと考える。 a) GPS only b) GPS+BeiDou 図 2-131 単独測位結果
0
2
4
6
8
x 10
4-10
-5
0
5
10
Time (s)
P
o
sitio
n
Er
ro
r (
m
)
RMSE : E: 1.0592m N: 1.1062m U: 2.5949m East (m) North (m) Up (m)0
2
4
6
8
x 10
4-10
-5
0
5
10
Time (s)
P
o
sitio
n
Er
ro
r (
m
)
RMSE : E: 0.9247m N: 1.5147m U: 2.3125m East (m) North (m) Up (m)165 2.9.3. BeiDou 信号による基線解析 BeiDou 衛星を他の衛星系と組み合わせて基線解析を実施する場合、衛星系間で位相 差をとらない「混合解析」方式が簡便に基線解析を実現できると考える。そこで、BeiDou のみの基線解析に加えて、BeiDou と GPS で位相差を取らない「混合解析」を実行でき る検証用プログラムを作成し、BeiDou による基線解析が実現可能であるか検証した。 測位環境・条件を表 2-132 にまとめる。このときの上空の GPS と BeiDou の衛星配置 及び受信衛星数を図 2-132 と図 2-133 に示す。 表 2-132 測位環境と条件 データ取得場所 東京海洋大学第4 実験棟の屋上 データ取得日時 2013-08-09 15:00~18:00 (UTC, interval:1 s) 受信機 Trimble NetR9
アンテナ Trimble Zephyr geodetic 2
基線長 14.5 m
アンテナ
精密位置 基線解析で得られたFIX 解
測位方法 二周波観測値による基線解析
GPS:L1+L2,BeiDou:B1+B2
アンビギュイティ決定方法 瞬時AR[15]+LAMBDA[16]+Ratio test[17] (>3)
仰角マスク角 15 度
信号強度マスク 30 dB-Hz
166 図 2-133 衛星数(場所:屋上、仰角マスク 15 度) 図 2-134 に BeiDou のみによる基線解析と、GPS と BeiDou による混合解析の水平測 位結果を示す。また、表 2-133 に基線解析の性能結果をまとめる。表 2-133 より、BeiDou のみによる基線解析で得られた水平測位精度(RMS)は 5.9 mm であり、GPS による通 常の基線解析(水平測位精度(RMS):10 mm 程度)に匹敵する精度といえる。これは、 BeiDou の耐マルチパス性能が GPS と同等であることに加えて、14.5 m 程度の短基線で は、BeiDou の二重位相差を適用することで BeiDou の暦に起因する観測誤差がほぼ除去 され、GPS による基線解析と同程度の測位精度が得られるようになったものと考える。 また、BeiDou と GPS を併用することにより、衛星配置に起因する測位誤差が改善する ことが予測されるが、図 2-134 b)では実際にそのような傾向にあることがわかる。 本検証の結果、基線解析についても、BeiDou と GPS による混合解析で実行可能であ ることを確認できたものといえる。
167 a) BeiDou only b) GPS+BeiDou 図 2-134 BeiDou による基線解析結果 表 2-133 BeiDou による基線解析結果 項目 BeiDou GPS+BeiDou 水平測位精度(RMS) 5.9 mm 3.8 mm 垂直測位精度(RMS) 14.8 mm 5.3 mm フィックス解割合 100 % 100 % 初期化時間(平均値) 0 s 0 s
168
3. 参考文献
[1] D.Odijk, P.J.G. Teunissen (2012) Characterization of between-receiver GPS-Galileo inter-system biases and their effect on mixed ambiguity resolution、GPS Solut 2012
[2] 山田 英輝, et.al、GLONASS 信号におけるチャネル間バイアスの校正、IEICE 2013 [3] H. Yamada, et.al、Evaluation and Calibration of Receiver Interchannel Biases for
RTK-GPS GLONASS, ION GNSS 2010
[4] O. Montenbruck, et.al、Code Biases in Multi-GNSS Point Positioning、ION ITM 2013
[5] J.Tegedor, et.al, Multi-constellation Precise Point Positiong including GPS, Glonass,Galileo and BeiDou, GNSS PPP Workshop 2013
[6] Colomina I et al (2011) The accuracy potential of Galileo E5/E1 pseudoranges for surveying and mapping. Proceedings of ION GNSS 2011
[7] R, Dach , et al. Combining the Observations from Different GNSS. In Proceedings of EUREF 2010 Symposium, 2010.
[8] BDS-SIS-ICD-2.0, BeiDou Navigation Satellite System Signal In Space Interface Control Document Open Service Signal (Version 2.0), Dec, 2010.
[9] IS-GPS-200E, Navstar GPS Space Segment/Navigation User Interfaces, June 8, 2010.
[10] Pengfei Cheng, et al, China Geodetic Coordinate System 2000, Eighteenth United Nations Regional Cartographic Conference for Asia and the Pacific Bangkok, pp1-7, Oct, 2009.
[11] Wenkun Yu, et al, Stochastic Model of GPS/BD Combined Standard Single Point Positioning, Proc. CSNC2012,Vol159, pp325-334, May, 2012.
[12] Liang Chen, et al, Study on Signal-In-Space Errors Calculation Method and Statistical Characterization of BeiDou Navigation Satellite System, Proc. CSNC2013, Vol243, pp423-434, May, 2013.
[13] Weiming Tang, et al, Triple-frequency carrier ambiguity resolution for Beidou navigation satellite system, GPS Solutions, DOI 10.1007/s10291-013-0333-9, Sept, 2013.
[14] 山田 英輝, 他, マルチGNSSを利用した測位精度の向上手法の検討, Proc. JSASS2013, pp1-4, Oct, 2013.
[15] Benyin Yuan, et al, Algorithmic Research and Realization of GPS/COMPASS Combined Relative Positioning, Proc. CSNC2012, Vol161, pp447-455, May, 2012.
169
[16] Chunang Shi, et al, Precise relative positioning using real tracking data from COMPASS GEO and IGSO satellites, GPS Solutions, Vol17, pp103-119, Jan, 2013. [17] Thomas Grelier, et al, Initial observation and analysis of Compass MEO satellite
signals, Inside GNSS, pp39-43, May/June, 2007.
[18] A. Simsky, et al, Field experience with future GNSS ranging signals (a review), Technical University of Munich, pp1-32, Jun, 2010.
[19] 国土交通省 国土地理院, 平成 23 年度マルチ GNSS 解析技術等の開発にむけた複数周 波数信号の組合せに関する調査検討業務, 2012.
[20] Wei Li, et al, Precise Point Positioning Using GPS and Compass Observations, Proc. CSNC2013,Vol244, pp367-378, May, 2013.
[21] Lizhong Qu, et al, Precise Point Positioning Using BeiDou and GPS Observations, Proc. CSNC2013, Vol245, pp241-252, May, 2013.
[22] M. Pratt, et al, Single-Epoch Integer ambiguity resolution with GPS L1-L2 carrier phase measurements, Proc. ION GPS 1997, pp1737-1746, Sept, 1997.
[23] P.J.G. Teunissen, The least-square ambiguity decorrelation adjustment: a method for fast GPS ambiguity estimation, Journal of Geodesy, Vol.70, pp.65-82, 1995. [24] P.J.G. Teunissen, et al, On the foundation of the popular the ratio test for GNSS